基于北斗卫星导航技术的森林火灾危险点自动预测方法*
2022-06-09 05:45郄亚微
自动化技术与应用 2022年5期
郄亚微,谢 涛
(广安职业学院土木工程学院,四川 广安 638000)
1 引言
森林火灾是危害森林生态环境的主要灾害之一,在我们国家,每年都有大量的火灾发生,严重破坏着人们赖以生存的生态环境。林火破坏了人们的房屋和财产,甚至危及人们的生命,林火的发生具有复杂性,既受自然因素的影响,如气候、天气,也受人类活动的影响,为减少森林火灾带来的危害,森林火险预报工作是十分重要的。国内对森林的监测主要通过瞭望塔人工值守检测、安排专业人员对林区进行巡视、飞机或无人机巡视和卫星生成遥感图像观测。其中,我国林火远程监测主要以瞭望台为主,国内重点林区修建的火情检测瞭望台覆盖率达到85%以上,随着国家的重视,近年来大批视频监控设备正逐渐开始装备到林区瞭望台上,从而提高了火情的监控效率。而国外的一些工业发达的国家在森林火灾监测技术的开发与研究一直处于领先地位,他们将森林火灾的监测作为一种公共报警手段与智能监控系统进行整合,这个系统能够有效接收报警信息并准确的判断出森林火灾发生点。
当前,已有较多学者开展了关于森林火灾危险点自动预测方面的研究,文献[1]中,刘钺,董小珊,叶慧,李瑞琪研究了基于GIS空间分析的城市火灾风险评估方法,该方法主要利用GIS 空间分析从城市区域层面对火灾风险进行评估,获得火灾危险点的预测结果;文献[2]中,徐燕翔,裴海龙研究了基于无人机的森林火灾检测系统,该系统主要以无人机作为平台,搭载带有彩色和红外摄像头的云台跟踪系统,实现森林火灾的自动探测,以对火灾危险点进行预测。上述方法均能够对危险点定位,但是存在预测精度差的问题,基于存在的问题,将北斗卫星导航技术应用到森林火灾危险点自动预测中。
中国自主研发的北斗卫星导航系统是继GLONASS 和GLONASS 之后第三个成熟的北斗卫星导航系统。该系统由空间段、地面段和用户段组成,可为全球范围内各类用户提供高精度、高可靠性的定位、导航、授时服务。通过上述分析,可以看出将北斗卫星导航技术应用于森林火险自动预报有一定的实际意义。
2 北斗卫星导航技术定位原理
地球站通过卫星1 和2 将查询信号发送到移动终端,人造卫星收到询问信号后,通过人造卫星转发器[3]将其发送给服务区域内的移动用户。接着,移动终端接收卫星转发信号,并同时向两个卫星发送。发出应答信号,由卫星转回地球站,移动终端反馈信号由地面站接收和解调。通过时滞分析,计算出地面站-卫星-移动终端-卫星-地面中心的信号传输时间,从而得到地面站-卫星-移动终端之间的距离,并根据已知的地面站坐标和卫星坐标,计算出地面站-卫星之间的距离。
以卫星1 和2 为球心,以移动终端与两颗卫星之间的距离为半径,按照移动终端与两颗卫星之间的距离制作两个球体。这些球一定是相交的,形成一个大圆,圆形也位于椭球表面,焦点是两颗卫星[4]。另外,地面站可以根据计算机中存储的数字地形图找到移动终端离地面的高度值,从而使地面站能够最终计算出用户点的三维坐标。其定位原理如图1所示。
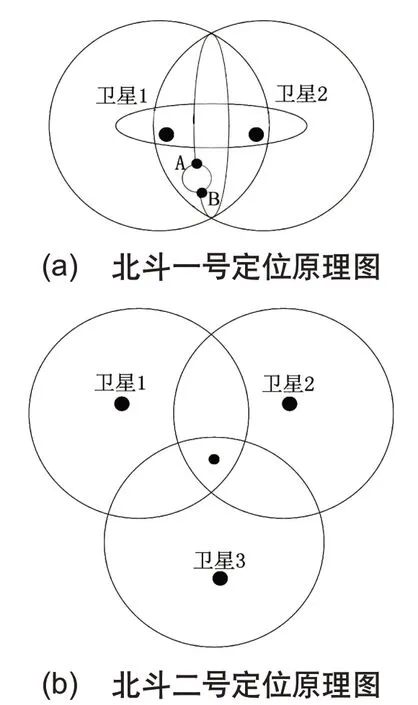
图1 定位原理图
北斗卫星导航技术在定位过程中,以移动终端至卫星的距离为半径分别做三个球,即三个球必然相交于一点,即该点就是所求的定位点。
一般情况下,通过三颗卫星能够求出定位结果,但是由于定位过程中测得的时间与卫星时钟不能同步,导致定位存在误差,因此需要进一步进行定位,具体过程如图2所示。
2.1 森林火灾危险点定位
在森林火灾危险点定位上,采用北斗卫星导航技术对其进行定位,主要采用导航技术中的伪差分法[5-6]进行定位,该方法是一种卫星导航定位的定位技术。基于北斗卫星导航技术的定位示意框架如图2所示。
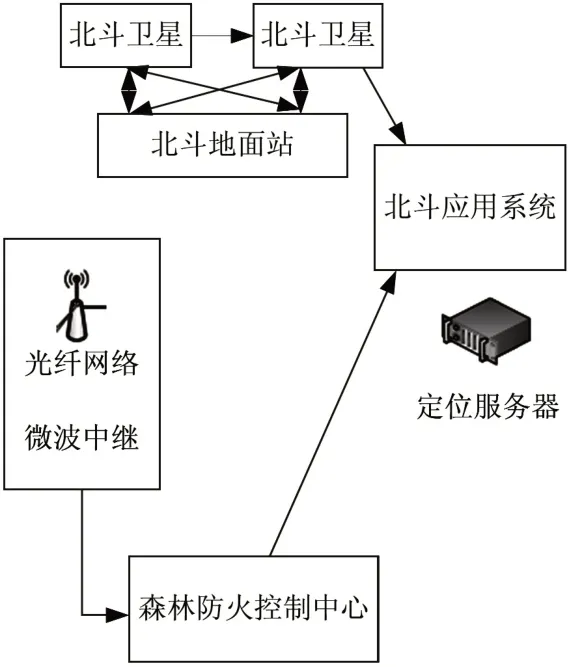
图2 基于北斗卫星导航技术的定位框架
伪距差定位法的基本原理是根据基准站和卫星的已知坐标,计算基准站到卫星的距离[7],然后与伪距差下的观测值进行比较。最后,通过差分信息数据链将各卫星的伪距校正数发送到移动终端[8],终端根据接收到的伪距校正数通过相应的算法计数来进行定位解算。通过对多个基站的伪距差,计算卫星的伪距校正数,并将其差分信息数据链路传送到移动终端。利用相应的处理方法,移动终端得到综合伪距校正数[9-10],然后进行差分定位求解。从而达到消除误差,提高定位精度的目的。
假设三颗卫星的坐标分别为(X1,Y1,Z1)、(X2,Y2,Z2)、(X3,Y3,Z3),地面接收机坐标为(X,Y,Z),卫星信号发射时间为t1,t2,t3,将卫星到基准站的距离表示为:

公式(1)中,ti代表卫星i的钟差,tb代表基准站b的接收机钟差,T代表电离层误差,ε代表其他噪声影响参数,Ii代表对流层误差。
通过差分信息链将基准站传送给移动终端,终端利用收到的伪距校正数来校正被测伪距,假设基准站坐标为xM,yM,zM,则移动终端伪距修正方程为:

公式(2)中,c代表伪距改正数变化率。
伪距差是根据得到的基站计算出的伪距校正数来进行定位,移动终端和基站在定位解算时所观测到的卫星进行解释,从而有效地解决了位置差的两个因素,提高了定位精度。
2.2 定位数据处理
依据上述过程完成定位,在此基础上对定位数据处理,监测数据的准确性直接影响到地质灾害稳定性评价和预警分析的结果,因此,灾害体在监测过程中,不可避免地要受到可控制或不可控制的随机因素,如降雨量、人类工程活动等,导致监测数据往往是实际资料和各种干扰资料的叠加,即监测值=资料+噪声。所以,将监测数据用于预警分析时,必须对其进行预处理。针对地质灾害监测数据处理分析对象的特点,确定其主要内容为:单点数据预处理和多点数据融合。
首先对单点监测数据处理,其处理总过程如图3所示。
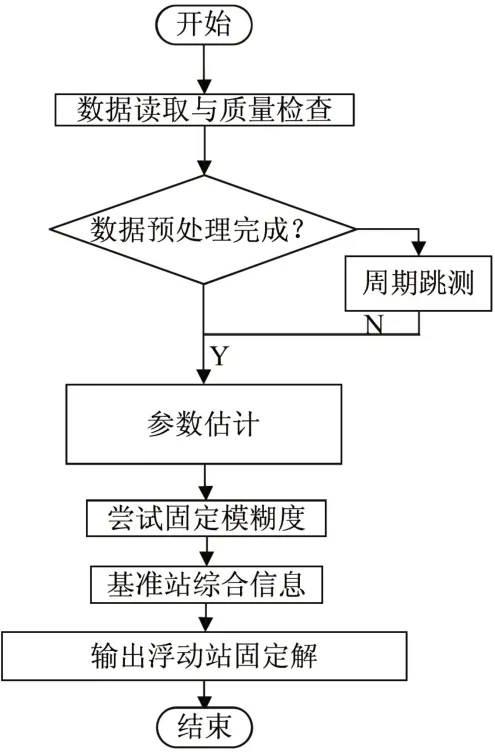
图3 数据处理总体流程
仪器在监测过程中由于受到某些因素的影响会得到某些明显不正确的数值,而仪器又无法通过自动识别将其剔除,即异常数据。当这种异常数据无法从监测的客观条件中找到合理的解释时,就称为粗差。但是如人工爆破引起的大变形,就不能称为粗差。另外,在粗差检验时,正常的监测数据也有可能出现较大的分散性,反映的也是客观情况,为此,采用下述计算方法进行计算:

公式(3)中,n代表监测值,xi代表随机变量。
在此基础上,对数据进行滤波处理,计算公式如下所示:

公式(4)中,m代表平滑值,y代表较高频率的信号值,yi代表插值基函数。
依据上述过程对单点数据预处理,在此基础上对多点数据融合,其操作过程如图4所示。
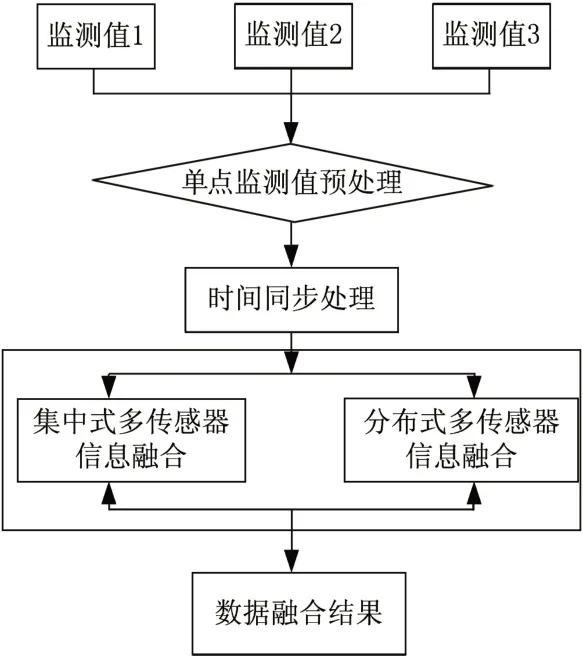
图4 多点监测数据融合处理过程
依据上述过程完成定位数据的处理,获得森林火灾危险点数据,以此完成森林火灾危险点自动预测。
3 实验对比
为验证此次研究基于北斗卫星导航技术的森林火灾危险点自动预测方法的有效性,进行实验对比。并将文献[1]中的基于GIS 空间分析的城市火灾风险评估方法与文献[2]中的基于无人机的森林火灾检测系统对比,对比三种方法的预测效果。
3.1 延时情况对比
分别采用此次研究的预测方法与传统的预测两种预测方法对森林火灾危险点进行预测,将危险点实际发生火灾的时间与三种方法预测到的时间对比,对比三种方法的预测延时情况,对比结果如图5所示。
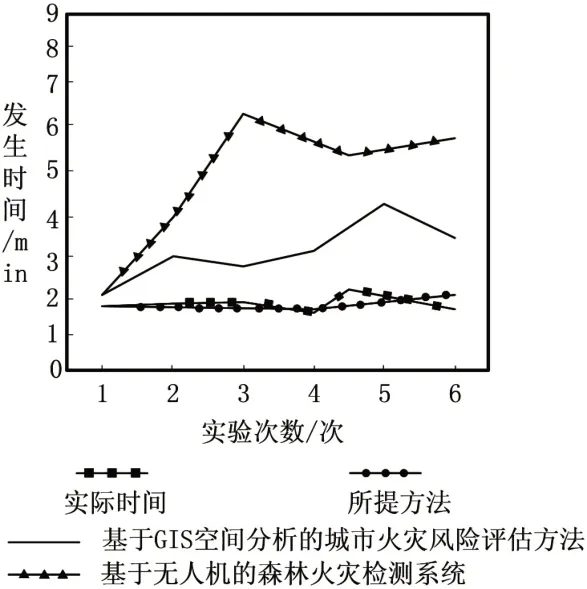
图5 延时情况对比
分析图5可知,此次研究基于北斗卫星导航技术的森林火灾危险点自动预测方法与火灾点实际发生的时间相差较小,基本延时控制在了1分钟之内。而传统的基于GIS空间分析的城市火灾风险评估方法与传统的基于无人机的森林火灾检测系统与火灾实际发生时间相差较大,预测延迟在1分钟以上,预测效果没有此次研究的预测方法预测效果好。
3.2 预测精度对比
将传统的两种方法与此次研究的森林火灾危险点自动预测方法预测结果对比,主要对比近距离下三种方法的定位效果与远距离下的定位效果,近距离下的定位精度对比结果如图6所示。
分析图6可知,在5个危险点的预测上,此次研究的预测方法均能够准确对其进行定位,具有较好的应用效果。而传统的两种方法定位精度较差,森林火灾定位上有一定的偏差,定位效果较差,没有此次研究的预测方法应用效果好。
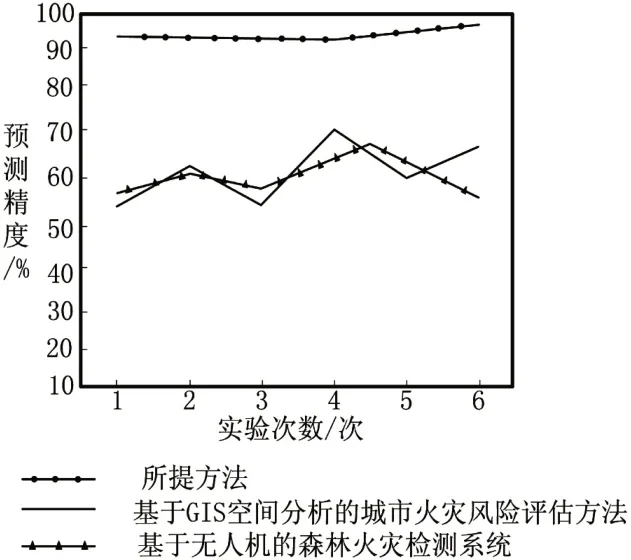
图6 近距离下预测精度对比
图7所示为远距离下的预测情况对比结果:
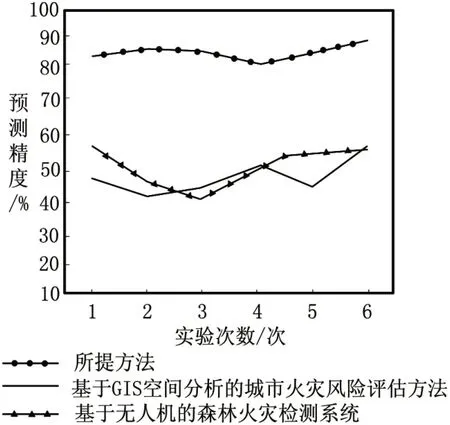
图7 远距离下预测精度对比
分析图7可知,在远距离定位情况下,三种方法的预测精度都有所降低,但是此次研究的预测方法预测精度仍然较高,均高于传统的两种方法。
综上所述,此次研究的基于北斗卫星导航技术的森林火灾危险点自动预测方法较传统两种方法的预测效果好,能够准确预测火灾点的发生位置,并且对于火灾发生情况,能够及时发现。原因此次研究的预测方法采用北斗卫星导航技术对危险点进行了定位,并对定位后的数据进行了精细处理,从而保证了较高的预测精度,具备一定的实际应用意义。
4 结束语
设计了一个基于北斗卫星导航技术的森林火灾危险点自动预测方法,并通过实验验证了此次研究的森林火灾危险点预测方法的有效性。实验结果表明,此次研究的预测方法能够在1分钟之内就可以将森林火灾情况传递至终端,数据传输速度快,并且定位精度达到90%以上,较传统的基于GIS空间分析的城市火灾风险评估方法与传统的基于无人机森林火灾检测系统定位精度高30%左右。证明通过此次研究的方法解决了传统预测方法预测精度差的问题,并提高了预测数据传输的速度,能够为森立火灾危险点定位以及预测上提供一定的帮助。然而由于研究时间的限制,所设计的预测方法还存在一定的不足,在后续研究中将进一步优化此次研究的方法,提高森林火灾危险点的自动预测效果。
猜你喜欢
地理空间信息(2022年10期)2022-10-31
小哥白尼(神奇星球)(2022年3期)2022-06-06
家园·电力与科技(2022年2期)2022-03-26
导航定位学报(2021年5期)2021-10-13
矿山测量(2021年2期)2021-05-07
矿山测量(2020年6期)2021-01-07
当代陕西(2019年18期)2019-10-17
安全(2018年10期)2018-10-19
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12