基于自动巡航控制和车道跟踪的自动公路系统构建*
2022-06-09 05:44路染妮
自动化技术与应用 2022年5期
路染妮,贾 佳
(西安航空职业技术学院 自动化工程学院,陕西 西安 710089)
1 引言
中国是东亚独立国家,人口约14.28 亿,是世界上人口最多的国家。国内生产总值的4.5%左右来自交通运输,高速公路的基础设施优于本地区其他国家,特别是印度、巴基斯坦和孟加拉国,公路是中国重要的交通运输工具,总里程14.25 万公里,计划增加到168 公里,到2020年达到478 公里。自动公路系统(AHS)的应用可以增加到公路的通行能力。
在发达国家,AHS已经引起了许多研究者的兴趣,它可以降低交通事故的风险,保护旅客。AHS 的一个更重要的方面是有效地利用空旷的道路,最大限度地发挥总通行能力,减少交通拥挤所造成的时间损失,通过对公路上所有汽车的自主控制和有效的相互组织,将提高出行者的体验。AHS 的另一个好处是确保汽车以允许的速度行驶,并遵守政府规定的所有规章制度。
大多数撞车事故都是由于人为失误造成的。原因包括疲劳、困倦、打手机电话或者其他任何可能分散驾驶员注意力的事情[1-2]。AHS 将确保不需要人机界面,这将帮助驾驶员摆脱一个方向驾驶数小时的累人工作,这将驾驶不那么麻烦。图1为连接首都北京和中央海岸上海的部分高速公路(中国称为北京高速公路),全长1212公里,于2006年竣工。

图1 高速公路图
AHS包括使用控制,检测和汽车跟踪技术,以提高公路通行能力和安全性为目的的汽车跟踪技术。各种数据表明,自动化可使给定的通行能力提高5个数量级,并将显著减少交通阻塞。假设速度暂时不变,大量的车辆需要在高速公路上行驶的车辆之间有更近的距离。这种将变道变得困难,因为车辆会寻找开口以移动到其他车道。此外,在变道时可能需要额外的间距。
考虑上述因素,拟议AHS 的目标是最大限度地利用现有基础设施的公路容量。公里容量可以描述为:

式中,C表示车辆数量,V是速度,Xr表示车辆之间的距离,L表示车辆长度。容量可以定义为给定速度、车辆间距和长度下的车辆数量(即流量“q”)。在瞬态过程中,流量可能超过通行能力,从而违反最大允许速度上消除了这些违规行为,从而维护安全。
如前所述,车道上的车辆数量可以随着速度的增加而增加,但由于刹车的作用,流量可以减少或停止,因此每辆车之间必须保持最小的距离,称为“安全距离”[3]。在中国,交通事故是造成伤亡的主要原因,世界卫生组织(WHO)数据显示,中国每10万辆汽车中就有104人死于交通事故,而美国为33人,东南亚为101人,这些数据足以说明多智能体AHS在中国的应用前景十分广阔。解决这些困难的一个好办法是公路自动化,许多研究者提出了公路自动化方法,提出了不仅提高了公路通行能力和安全性,而且节省驾驶员的努力。由于技术的进步,自主车辆编队的研究领域非常广泛。在为编队设计分布式控制器之前,必须考虑以下问题:①地层稳定性;②队形可控性;③信息不确定性。有多种技术可用于解决这些编队控制问题。
本文设计了一个基于巡航控制车道跟踪的AHS,其中每辆车作为一个组的单一代理,每辆车作为其跟随着的主控。此外,当任何其他车辆加入一组并启动巡航控制时,它将作为编队的一部分,并作为其他车辆的主控或从控。在一个系统中,代理人同意的利益必然是一些共同的利益,而这些利益不一定是单个代理人的共同利益,如单个车辆的运动,因此有必要考虑代理人网络中的同意问题。
本研究的主要目标是:
(1)设计基于巡航控制车道跟踪的自动驾驶系统;
(2)规划巡航控制模型,其中每辆车作为一个组的单一代理,每辆车作为其跟随者的主控;
(3)确保每当一辆新车加入一个组时,它必须作为编队的一个组成部分,并作为其他车辆的主控或从空工作;
(4)使用Matlab对自动巡航控制系统进行建模和仿真;
(5)仿真结果表明了我们提出的自动巡航控制系统的有效性和安全性。
2 车辆跟踪和车道检测
近年来,车道检测系统已经广泛应用于自动驾驶系统(AHS)中,其主要目标是保护乘客和辅助驾驶[4]。车道检测与跟踪是汽车在道路上的跟踪和定位的关键技术,在此介绍了车道和车辆检测方法,提出了两种新的车道检测和车辆检测方法。
2.1 车道检测
车道检测的目的是在不同的情况下,用彩色车道标志来跟踪车道,我们提出了一种新的车道检测技术,以提高并行车道检测的效率和有效性,并提出了一种适用于各种交通困难情况的车道检测技术。我们使用图像处理来检测车道。在车道模型中,土地标记像素的确定是至关重要的,可以通过寻峰方法来实现。该方法的墓的是发现扫描图像中的峰值。这些像素在车道检测的过程中表现为噪声,通过去除交通模型中的被跟踪车辆的像素点,可以有效地降低这些噪声。
图2为车道检测流程图,在此流程图中,首先使用像素处理来检测车道,然后在图像下面来进行检测,接下来识别高速公路的垂直边缘,然后将这两个特征结合起来,最后将信息发送给考虑中的车辆,并命令其慢行或快行跟上其它车辆。
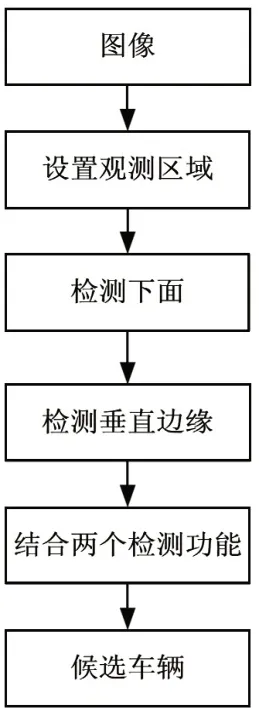
图2 车道检测流程图
2.2 车辆检测
粒子滤波器不仅能提供最后的检测结果,而且能给出候选粒子最近的观测结果,粒子滤波器的样本是从垂直边缘获取的,在对称性和尾灯下以及交通模型限制了样本位置,交通模型不仅可以对车道跟踪车辆进行记录,而且可以连续监测他们之间的关系,因此当车辆在特定车道上被跟踪时,就不会产生其它样本,从而提高性能。
图3所示为车辆检测的流程图,通过使用图像处理来检测车辆,在图像中进行车道线标记,检测车道标线,然后构造车道模型,最后将信息发送给车辆。

图3 车辆检测流程图
3 多车编组
在队形中,代理以期望的模式移动并完成期望的任务。每个独立的代理跟随它提供和一个局部信息。队形的感念收到生物例子的鼓励,例如鸟群、鱼群和蚂蚁群。
对于移动代理,执行了三个群集规则,它模仿鸟类群集“Boids”,群集描述了一组鸟的行为,一群鱼一起游动或昆虫群集的行为。它的规则是:分离,避免与相邻代理碰撞;对齐,与相邻代理速度相同;还有凝聚力,继续靠近邻近的特工。这里,相同的速度是一个矢量,表示方向和速度。避免碰撞是避免拥挤和相互碰撞的一种分离技术,而群聚中心使车辆靠近群聚中心或者群聚附近。群聚过程可视为队形控制的一个子集,需要车辆沿同一路径紧密行驶,但特定车辆占用的道路条件微不足道。与群集相比,编队更为严格,需要车辆在通过道路时保持特定的比较位置。
通过使道路上的所有车辆自动化,并使这些车辆无缝地相互协调,将提高乘客旅行的舒适性。这种系统的另一个优点是确保车辆以合法的速度行驶,并遵守国家实施的所有其它法律。这将避免任何罚款和驾驶执照上的分数,而不仅仅是改善道路安全。
假设我们有n个具有线性动力学的车辆:

其中,xi∈Rm是车辆状态,ui∈Rp是控制,i是车辆指数,i∈V={1,…,n}。
假设每辆车检测到的数据是:

而j∈Ni和yi∈Rk是内部测量,而zij∈R1是相对于其他人的外部测量。我们假设每辆车都能感应到其他车,即Ni≠0。由于单辆车无法将驱动为零,因此需要在测量中加入一个误差。

一个分布式控制器K映射yi,zi到ui与内部状态vi∈Rs。

图4为一个多车辆编队的典型例子,车辆之间保持安全距离,并以恒定速度行驶。
4 自动巡航控制
本文设计一个能保证从机与主机保持一定距离的系统,该系统也能保证从机遵循主机的速度或最大允许速度,同时也能保证主机与从机之间或两个或多个从机之间不发生碰撞。
巡航控制模型是在汽车不稳定的情况下,通过对车速进行评估,使车速与参考车速相匹配,从而根据控制规律自动调节油门来维持汽车的稳定速度。将巡航模型建立在比例积分微分控制器(PID 控制器)的基础上,PID 控制器是一种用于工业化控制的装置,用于调节温度、速度和其他应用。PID控制器使用控制回路反馈来控制变量,是最精确和稳定的控制器。PID 控制是引导系统达到目标的一种稳定可行的方法。PID控制使用闭环控制反馈,使过程的实际输出尽可能接近输出目标和设定点[5-8]。
该巡航模型的PID控制器中,P代表比例,P(s)=Kpe(t),I代表积分,代表微分控制,。X(s)代表测量的过程值,而u 代表所需的过程值或设定点。
假设一辆质量为m的汽车,它受到在道路路面的支撑力u,运动阻力和风阻力的作用。系统由以下等式定义:

结果是

假设一辆质量为1500kg,阻尼系数为20N.s/m的车辆,因为速度是唯一的变量,所以系统的状态空间表示为:

在零初始条件下,系统的传递函数为:

图5为巡航控制仿真模型。本设计在PID 控制器之前使用一个积分器,以使输出更稳定。一个阶跃输入和输出反馈到积分器,然后再反馈给PID 控制器,最终得到了PID 控制汽车模型。

图5 巡航控制仿真模型
5 仿真结果
为了验证本文提出的巡航控制方法的有效性,本研究在MATLAB 上进行了多次仿真,仿真计算机采用Intel i7第9代处理器、32GB内存、64位Win8.1操作系统和Matlab 2016A仿真软件[9-11]。
模拟结果如图6和图7所示。图6显示了从机和主机所覆盖的距离及其在整个形成中的加速度之间的关系图。
从图6可以看出,从车紧跟着它的主车,当主车的加速度改变。纵轴表示加速度,横轴表示距离。它还显示车道跟踪的结果,并验证在巡航控制的帮助下,每个从车在特定车道上以恒定速度跟随其主车,并与主车保持特定的距离。

图6 加速度和距离图
图7显示了系统在阶跃输入下的响应,该图减小了超调量和调节时间,对上升时间和稳态误差影响较小,如图7所示,系统接近稳定,验证了所设计控制器的有效性。
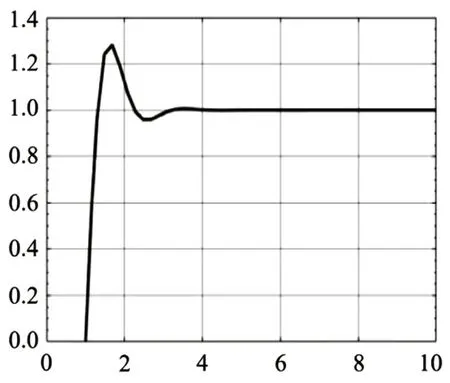
图7 控制器响应
6 结束语
本文提出了一种多车主从车道跟踪编队。一辆车领先另一辆车被认为是它的主人。从机以恒定的速度行驶,并通过巡航控制始终保持与主机的特定距离,从而避免任何碰撞。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
煤气与热力(2021年12期)2022-01-19
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
电子制作(2019年13期)2020-01-14
北京航空航天大学学报(2017年3期)2017-11-23
汽车与安全(2017年7期)2017-09-12
北京航空航天大学学报(2017年10期)2017-04-20
北京航空航天大学学报(2017年10期)2017-04-20
筑路机械与施工机械化(2014年4期)2014-03-01