尘源跟踪用无线智能阀门的设计*
2022-06-09 05:45袁酉亮
自动化技术与应用 2022年5期
袁酉亮
(天地(常州)自动化股份有限公司,江苏 常州 213003)
1 引言
随着煤矿开采强度的增大,机械化水平的不断提高,粉尘的产生量也越来越大。综合机械化采煤工作面粉尘浓度高达3000~4000mg/m3,个别甚至高达8000mg/m3,放顶煤粉尘浓度甚至达到上万毫克。恶劣的工作环境,严重威胁工人的健康。并且,煤矿井下粉尘具有爆炸性,一旦引起瓦斯或粉尘爆炸,还会危及人员安全,造成巨大的生命财产损失。大部分工作面采用的是井下工作面自动喷雾降尘,安装于液压支架上,跟随采煤机的位置进行洒水降尘(尘源跟踪)[1],但因阀门设备采用的是电磁阀,需要交流供电,因此必须连接供电线路,然而由于煤矿工作面液压支架需要随着采煤机不断的回采,支架与支架之间不断的交错运动,以及放顶煤落下等原因,支架间的线路被拉断、砸断、夹断等现象屡见不鲜,一方面加大了维护难度,另一方面增加了漏电隐患。对此,本文设计了一款基于电池供电的矿用低功耗智能阀门,在实现工作面尘源跟踪功能的同时,可采用电池供电,尘源跟踪时工作时间可达到3个月以上。
2 工作原理
智能阀门控制电路主要由MCU(中央处理器)、传感器信号检测模块、阀门位置检测模块、显示模块、电阀控制电路、无线通信模块、电源电路等部分组成。智能阀门接收来自传感器的电平信号或者无线通信模块的信号,并用这个信号与当前阀门的开关状态比较,如果判断状态不一致,则打开电机电源,让电机带动阀门旋转到传感器或无线模块所请求的位置,使得阀门打开或关闭,从而水路被接通或切断,最终实现尘源跟踪喷雾降尘的目的。
3 智能阀门硬件设计
3.1 尘缘跟踪工作过程简介
尘源跟踪系统由智能阀门、无线接收器、无线发射器、高压喷雾泵、喷雾架以及管路组成。无线发射器安装于采煤机上用于定位采煤机位置[2],智能阀门和无线接收器每隔若干个液压支架安装一套,用于控制附近几个喷雾架的水路通断,如图1所示。
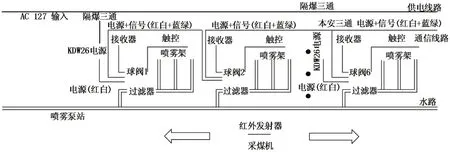
图1 尘源跟踪系统组成图
在采煤机割煤过程中,无线发射器自动读取附近的阀门ID 号并智能判断哪个阀门需要打开,然后发送无线信号给该智能阀门[3],智能阀门接收到无线数据后,打开阀门进行喷雾降尘,超过指定的时间后自动关闭停止喷雾降尘。由此可见,智能阀门只有在接收到采煤机上的无线信号时才需要工作,平时可处于待机状态。
3.2 总功率计算
工作面采煤机一般一天割两刀煤,即采煤机来回运行两次,这意味着智能阀门每天开、关两次。由于智能阀门采用的电机开——关一次的时间需要25秒,运行时电流约300mA。根据焦耳定律:

式中:U为电机的供电电压;
I为电机运行时的平均电流,取0.3A;
t为运行时间,取100 秒(25 秒×4 次/天)。将该数字代入公式(1)得
Q=U×0.3×100=30U
根据能量守恒定律,电机折算到每秒所消耗的电能[4],计算平均电流公式为:

式中:Q为一天消耗的总能量,这里仅考虑电机所消耗的能量;
U为电机的供电电压;
t为运行时间,为一天的秒数24×3600,代入公式(2)得
I(avg)=30U÷U÷(24×3600)≈347μA
这里假设采用的电池为12V/1Ah,表示存储的总能量可以12V电压连续放电1小时[5-7]。根据焦耳定律公式(1)
式中:U为电池的电压;
I为电池电流,取1A;
t为运行时间,单位为秒,取3 个月(3600 秒×24×90)。将数字代入公式(1)得
Q=U×1×3600=3600U
根据能量守恒定律,智能阀门折算到每秒所消耗的电能,按照公式(2):
式中:Q为总的电池能量;
U为电机的供电电压;
t为运行时间,为三个月的秒数24×3600×90,代入公式得:
I(avg)=3600U÷U÷(24×3600×90)≈463μA
以上结果表示:如果12V/1Ah的电池供电工作三个月[8],智能阀门最大待机总电流必须小于463μA:
除电机供电外的待机电流:462-347=115μA
因此,通过初步计算,当采用12V,1Ah电池供电时,主板电流不能大于115μA。
3.3 硬件设计
如上节所述,硬件设计需要同时满足功能和性能的要求。硬件功能实现方面包括阀门主板、微型电动球阀和电池三部分,而降低整机功耗需要从几个方面入手:①减少主处理器的运行时间;②尽量使得整机长时间处于待机状态并降低待机功耗;③降低外围器件电流并在不工作时处于断电状态。
3.3.1 主芯片选择
按上述要求,我们选取的单片机需要满足两个条件:①运行时满足一定的处理速度且运行电流较小;②具有待机模式,考虑到外围电路的待机电流余量,单片机的待机电流应控制在10μA以下。智能阀门的主处理器采用了STM32L431处理器,STM系列单片机是意法半导体设计的基于ARM平台的32 位处理器,它包含了从低功耗到高性能的一系列单片机,而STM32L431 是其中一款基于ARM®CortexTM-M3微控制器的低功耗32 位MCU。STM32L 处理器的节电工作模式具有6种,具体模式如表1。
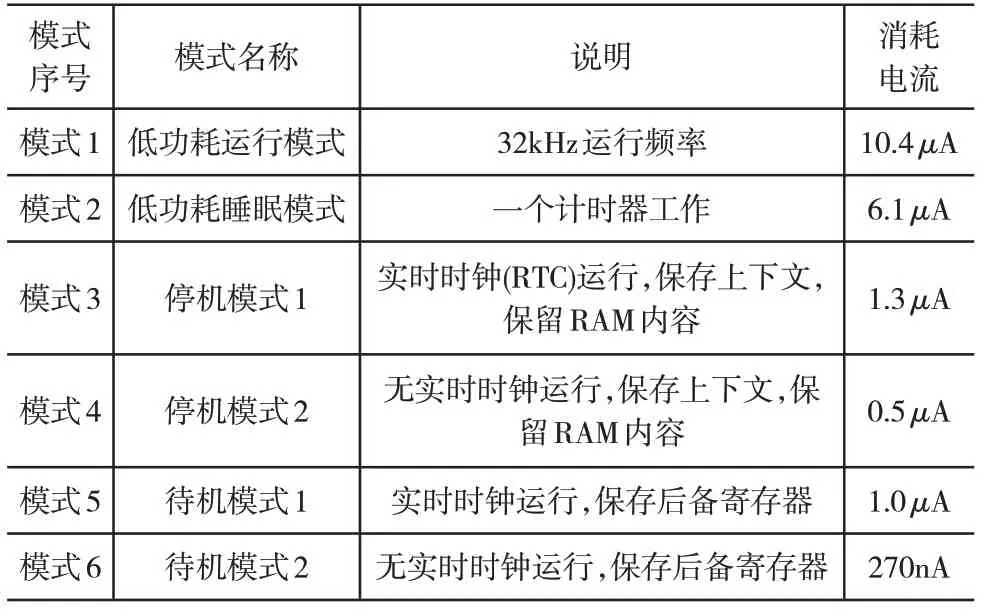
表1 STM32L系列节电模式
STM32L431 处理器单片机具有16 位A/D 转换器、3 路UART、定时器、看门狗,以及大量的I/O等片上资源。可满足本产品的设计要求并可实现在线升级。
根据实际应用,该智能阀门在上电时采用运行模式,在短暂的初始化后即进入节能模式4,采用该模式的原因是一方面电流趋近于模式6,另一方面唤醒后不需要进行复位操作,方便软件编写。单片机采用定时中断唤醒方式,电路也按此要求设计。
3.3.2 电源电路
智能阀门采用15~24VDC 电源供电,经过V1 软启动后,进入N1。N1 为DC-DC 电源模块,将15~24VDC 电源电压转为12V,该电源分为三路,第一路提供给电池实现在线充电,第二路经过VD1 后通过HT7533 降压到3.3V 提供给主板,第三路直接提供给电机,即在有外部电源供电的情况下电机的电源由外部电源提供。
这里N1 和VBAT 之间串接的VD1 是为了阻止当外部电源掉电后电池由VBAT处向N1反向放电。VD1所采用的二极管的类型也必须有所筛选。这是由于一般应用时,二极管反向漏电基本不予考虑,但在低功耗设计时,需考虑锗二极管比硅二极管反向漏电要大得多,以1N5819和1N4007为例,测试反向电流的电路和获得的电流如下表2(温度25°):
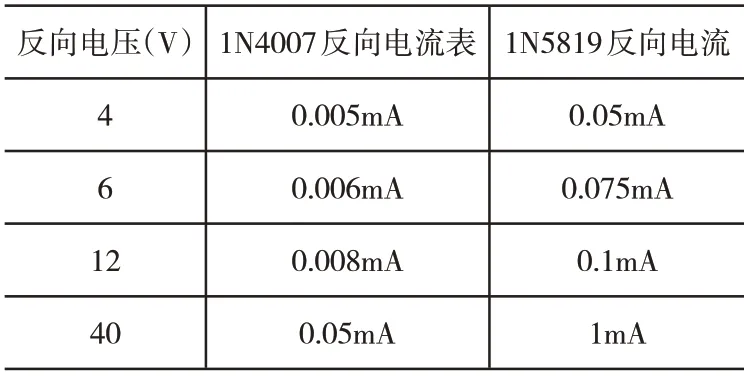
表2 二极管反向电压-电流对比表
从表2可知,当1N5819 承受反向电压时,其漏电流在12V 时为0.1mA,约100uA,对于主板休眠时要求的最大115uA的电流来说这显然是不可接受的。
采用硅二极管1N4007 时,当反向电压在12V 时仅有8uA。因此此处必须采用硅二极管。
3.3.3 移架喷雾信号采集电路
尘源跟踪系统中智能阀门需要完成移架时的喷雾降尘,为了实现该功能阀门需要采集移架信号,用于实现移架喷雾,采集移架信号是通过振动传感器实现的。振动传感器由一根金属杆外部套了一个弹簧组成,静态时没有电流耗费,当移架时液压支架的振动传导至该传感器,弹簧接触到金属杆,形成回路,使得IN1 出现一个由高电平变为低电平的下降沿,从而唤醒单片机,执行开阀动作。在执行完开阀动作后智能阀门立即设置一个超时唤醒定时器并进入休眠状态。该超时唤醒定时器会在一定时间后唤醒智能阀门执行关阀门动作。
3.3.4 阀门开关位置检测
阀门开关位置采用霍尔传感器进行检测,霍尔传感器是一种霍尔效应制作的一种磁场传感器,是磁电效应的一种,它将磁信号转为了电信号,与电位器、微动开关及编码器相比,无机械磨损,消除了开关过度后造成的机械损伤的风险,电路图如图2所示。
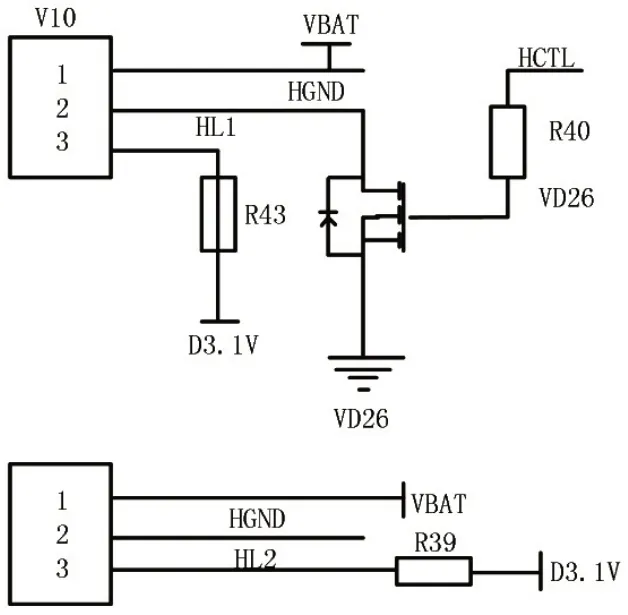
图2 阀门位置检测电路
其中V10和V11为霍尔传感器,以A44E为例,由于霍尔元件工作时电流为4mA,而阀门位置在电机不动时不需要检测。因此为了降低功耗,霍尔元件的电源由单片机控制,只有电机在运行时单片机才会通过电源开关元件给霍尔元件供电,平时处于断电状态。并且,在控制霍尔元件电源的开关元件选择方面,为了降低静态功耗,用于开关霍尔元件的电子开关需采用NMOS 管而不能用三极管,其原因是采用NMOS管AO3400A关断时漏电约为1μA,而如果采用三极管SS8050则会带来更大的漏电流(约40μA)。
3.3.5 阀门电机驱动部分
阀门电机驱动部分采用了一只6W 的有刷电机作为阀门的驱动装置,额定电流为12V/0.5A,有刷电机的输出为5500 转/min,通过速比为7500:1 的四级减速电机,将速度减低到0.7转/min,而输出扭矩变为15N.m,用于带动球阀进行水路的开关控制,由于球阀的特性,一旦阀门定位完成后即可切断电源,其耗电量为0。因此适合于低功耗电动阀门不频繁控制水路开关的场合。
阀门的电机供电由电池通过主板的PMOS 管提供,MOS 管V2 控制电机开关,当需要开或关阀时,单片机拉高管脚M_ONOFF,导通三极管V4,将PMOS 管V2 的栅极拉低,使得V2导通,控制V2对电机供电。这里需强调的是,由于电机启动或堵转时反向电动势很小,因此启动或堵转时电流非常大(这里采用的电机启动或堵转时电流接近4 安培),所以启动过程中需要采用PWM 方式降压供电以减少冲击电流,以保护电源。V3为电流采样器件,用于对电机工作电流大小的监视,当电机电流过大时单片机将及时切断电源,起到保护电源和电机的作用。
智能阀门采用超低功耗的点阵式OLED,可以显示菜单并设置各种参数,当休眠时显示被关闭以节约电力。
3.3.6 无线模块选择部分
根据尘源跟踪现场实际情况,采煤机上的无线接收模块和智能球阀之间的距离不超过10米。智能球阀采用电池供电,因此无线模块的选择需满足如下几个条件:①低功耗:收发电流小于100mA;②为了缩短单片机工作时间,无线模块从休眠或上电到建立与采煤机接收模块连接的时间越短越好;③传输距离不小于20 米;④休眠功耗低,应小于10 微安(也可通过关闭其供电回路实现)。表3为典型的无线模块和对应的参数:
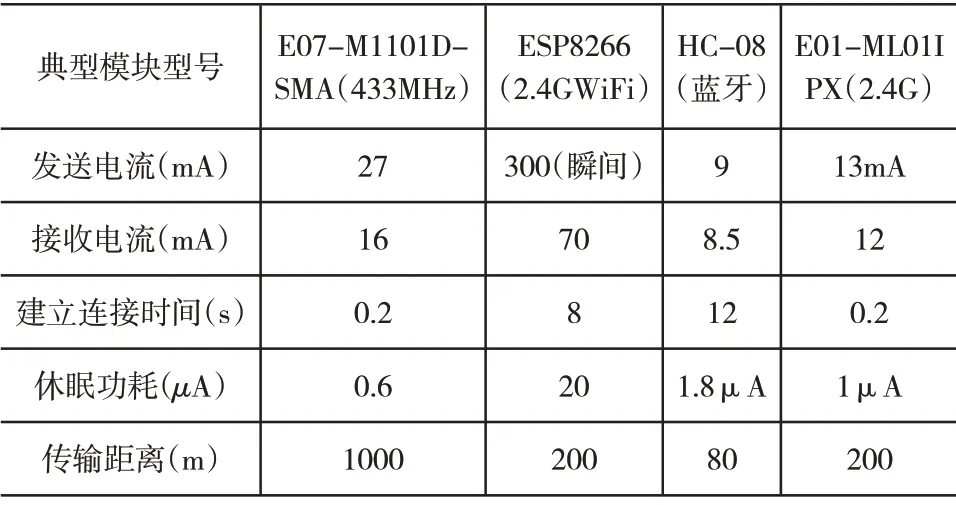
表3 无线模块参数对比表
由上表并结合现场实际要求,本次设计采用的无线模块型号为E01-ML01IPX,该模块频率为2.4G,采用nRF2401作为射频芯片,nRF2401 是单片射频收发芯片,芯片包括一个集成的频率合成器、功率放大器、晶体振荡器和调制器。可通过3 线SPI 端口配置发射功率和工作频率等工作参数,具有极低的电流消耗,在-5dBm的输出功率时仅为10.5mA,在接收模式时仅为18mA。具备掉电模式,可以很容易地实现低功耗需求。
4 试验结果
按上述方法对智能阀门进行硬件设计,单机试验中采集了休眠电流、唤醒电流、通信发送电流、通信接收电流、电机运行电流并记录。
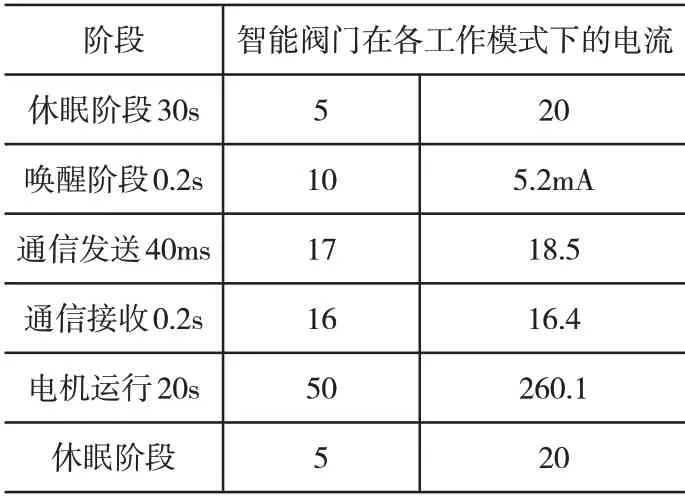
表4 智能阀门在各工作模式下的电流
其中电机运行时间段为每天4次(开-关两次),这里忽略不计。由此,30秒内的平均电流为109μA,小于设计计算要求的115μA,满足设计要求。
5 结束语
低功耗智能阀门用于工作面尘源跟踪,功耗低,定位准确不受煤尘影响,施工维护方便,很好的满足了工作面恶劣环境中的降尘要求。目前该智能阀门已应用在淮南新集二矿以及其他煤矿井下工作面作为尘源跟踪、回风巷降尘等人员维护不便的场所的自动降尘设备,并且待机时间长达四个月,性能优越,控制可靠,获得了客户的好评。
猜你喜欢
流程工业(2022年3期)2022-06-23
防爆电机(2022年1期)2022-02-16
煤气与热力(2021年3期)2021-06-09
河北画报(2021年2期)2021-05-25
电子制作(2019年13期)2020-01-14
煤矿机电(2019年6期)2020-01-13
电子技术与软件工程(2019年15期)2019-12-03
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30