
MG400/920-WD型采煤机防滑制动力的分析
2020-01-13 05:12盛永林
煤矿机电 2019年6期
盛永林
(天地科技股份有限公司 上海分公司, 上海 200030)
0 引言
煤矿井下的采煤工作面条件十分复杂,特别是在煤层倾角较大时,采煤机遇到紧急状况(如断电、驻停),在没有牵引力的作用下,若制动力不足,采煤机受自身重力的影响会沿输送机的槽帮产生向下的滑动,不但对采煤机以及配套的设备造成损坏,而且对井下工作人员的安全产生较大的威胁[1-3],因此,对采煤机防滑制动力大小的研究至关重要,必须要求采煤机防滑制动器能产生足够的制动力防止采煤机下滑,以保证采煤机在大倾角煤层工作面安全可靠运行。本文以MG400/920WD型采煤机为例,通过对采煤机的受力分析,推导出制动力的计算公式,并分析制动力与不同煤层倾角和采煤机工作仰角的关系,其研究结果对采煤机的防滑设计具有一定的参考价值。
1 采煤机防滑制动力数学模型的建立
以MG400/920WD型采煤机为例,其整机空间位置如图1所示。

1-前滚筒;2-前摇臂;3-采煤机机身;4-后摇臂;5-后滚筒;6-滑靴;A-前导向滑靴;B-后导向滑靴;C-前支撑滑靴;D-后支撑滑靴。
由图1可以看出,滑靴分为支撑滑靴和导向滑靴,其支撑滑靴主要是起支撑的作用,而导向滑靴既要承受采煤机的自身质量, 还要引导采煤机沿输送机槽帮运行,侧面会与输送机产生摩擦。由于2种滑靴的作用不相同,受力也不相同,图2为受力示意图。
采煤机的受力示意图也可简化为图3所示。根据空间力系平衡条件,由∑X=0,得:
FZ+μ(NAY+NAZ+NBY+NBZ+
NCZ+NDZ)=Gcosβsinα
(1)
式中:FZ为采煤机的防滑制动力,kN;μ为采煤机滑靴与输送机的摩擦因数,μ=0.2;NAY、NBY为前、后导向滑靴Y方向的侧向力,kN;NAZ、NBZ为前、后导向滑靴Z方向的支撑力,kN;NCZ、NDZ为前、后支撑滑靴Z方向的支撑力,kN;G为采煤机的总重力,kN;α为采煤机工作面煤层的倾角,(°);β为采煤机的工作仰角,(°)[1]。

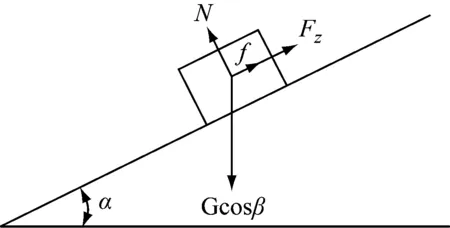
图3 采煤机受力示意图
由∑Y=0,得:
NAY+NBY=Gsinβ
(2)
由∑Z=0,得:
NAZ+NBZ+NCZ+NDZ=Gcosβcosα
(3)
将式(2)和式(3)代入式(1),则防滑制动力的数学模型为:
FZ=G[cosβsinα-μ(sinβ+cosβcosα)]
(4)
2 防滑制动力与倾角的关系
结合MG400/920WD型采煤机的参数,由MATLAB软件绘制出采煤机在不同工作仰角β下防滑制动力与煤层倾角α的关系曲线,如图4所示。
由图4可知,当煤层倾角α≤11.3°时,由于此时采煤机滑靴与输送机间的摩擦力能克服其自身重力引起的下滑力,故采煤机的工作仰角β无论作怎样的变化,采煤机都不会发生下滑;但当采煤机的工作仰角β不同时,采煤机发生下滑时的煤层最小倾角α也不同,若工作仰角β越大,则采煤机发生下滑时的煤层最小倾角α也就越大。图4中,当采煤机刚要发生下滑时,β=0°时,α=11.3°;β=32°时,α=18.2°。当采煤机的工作仰角β一定时,若煤层倾角α大于采煤机发生下滑时的煤层最小倾角时,随着煤层倾角α的增大,则采煤机所需要的防滑制动力也不断地增大[2]。

图4 不同仰角β下防滑制动力与倾角α的关系曲线
3 防滑制动力与仰角的关系
采煤机在不同煤层倾角α下防滑制动力与其工作仰角β的关系曲线,如图5所示。

图5 不同倾角α下防滑制动力与仰角β的关系曲线
由图5可知,是当煤层倾角α一定时,采煤机所需要的防滑制动力随着工作仰角β的增大而不断地减小,这主要是采煤机工作仰角β的增大,使得采煤机导向滑靴受到的侧向力增大,导致采煤机与输送机间的摩擦力也增大,从而使采煤机所需要的防滑制动力也相应地减小。
4 防滑制动力与倾角和仰角的关系
采煤机的防滑制动力与煤层倾角α和其工作仰角β的关系如图6所示。

图6 防滑制动力与倾角α和仰角β的关系
由图6可以看出,采煤机防滑制动力的大小是受煤层倾角α和其工作仰角β的共同影响,即随着煤层倾角α的增大而增大,随着工作仰角β的增大而减小。当α=50°,β=0°时,采煤机所需要的防滑制动力可达到最大值,其最大值为306.8 kN[3]。
5 结论
本文通过对MG400/920WD型采煤机的受力分析,建立了防滑制动力的数学模型,并分析了防滑制动力与煤层倾角α和采煤机工作仰角β的关系,得到的结论为:
1) 当煤层倾角α≤11.3°时,采煤机不会发生下滑,无需安装防滑制动器装置;当煤层倾角11.3°≤α≤18.2°时,采煤机是否发生下滑视采煤机工作仰角β而定;当煤层倾角α>18.2°时,采煤机会发生下滑,须安装防滑制动器装置。
2) 当煤层倾角α>18.2°时,采煤机所需防滑制动力的大小随着煤层倾角α的增大而增大,而随着工作仰角β的增大而减小。
猜你喜欢
煤炭工程(2022年8期)2022-08-24
矿山机械(2022年5期)2022-05-19
现代机械(2022年1期)2022-03-15
防爆电机(2022年1期)2022-02-16
河北画报(2021年2期)2021-05-25
初中生世界·九年级(2020年2期)2020-04-10
电子技术与软件工程(2019年15期)2019-12-03
建材发展导向(2019年11期)2019-08-24
山东工业技术(2016年15期)2016-12-01
科技视界(2016年15期)2016-06-30
