提高LLC 谐振变换器轻载效率的改进型间歇控制
2022-06-03 08:42王爱玲
电源学报 2022年3期
王爱玲
(济宁职业技术学院机电工程系,济宁 272037)
LLC 谐振变换器具有良好的软开关工作特性,适用于高频和高功率密度应用场合,在通信电源、电池储能系统、新能源发电系统、直流分布式发电系统和能源互联网等领域得到广泛应用,并具有良好的发展前景[1]。目前,已有大量文献报道了LLC谐振变换器的分析[1]、设计[2-3]、控制[4-5]、优化设计[6]和轻载效率提升[7-12]等方面的研究。
LLC 谐振变换器轻载运行时,开关频率需要调节到谐振频率的数倍才能维持目标输出,这会大大增加驱动损耗、开关损耗和高频磁损耗,造成轻载效率低下。提高轻载效率成为LLC 谐振变换器控制策略的研究热点之一。这些策略大致可以分为3类:将PFM 控制改为PWM 控制[7-9]、间歇控制[10-11]和移相控制[12]。文献[7-9]提出了PFM+PWM 的组合控制策略。当变换器工作在轻载工况时,系统自动进入PWM 工作状态,此时变换器工作在谐振频率附近,变换器通过调节占空比稳定输出电压。由于开关频率大大降低,PWM 控制可以有效降低高频磁损耗,但这也导致LLC 谐振变换器的软开关优势消失,器件开关损耗增加,而且会带来开关噪声变大等问题,因此提高效果有限。文献[10-11]提出了采用基于电压滞环的间歇模式控制来提高轻载效率,其基本原理是轻载工作时,当输出电压低于滞环下限时,变换器工作在谐振频率,该段时间为工作时间;当输出电压高于滞环上限时,变换器停止工作,该段时间为关断时间。通过控制变换器间歇性工作达到减小变换器损耗从而提高轻载效率的目的。电压型输出带来的不利影响是输出电压纹波增大,需要合理设计滞环环宽。文献[12]采用移相控制改善轻载效率,其原理与PWM 相似,但存在一个桥臂无法实现软开关的问题。
本文采用间歇控制作为提高LLC 谐振变换器轻载效率的基本策略,针对传统间歇控制存在的工作时间内变换器无法工作在最佳输出功率点(从关断时间切换到工作时间时开关频率变化剧烈)的问题,提出了一种改进型间歇控制策略,其主要特点是工作时间内的开关脉冲数不受负载影响,固定为3 个脉冲(第一个脉冲用于快速建立最佳输出功率点),而关断时间则会随着负载变化而变化。
1 改进型间歇控制原理
LLC 谐振变换器的拓扑结构如图1 所示,原边与副边均采用全桥结构,可应用于双向DC/DC 功率变换场合。图中SP1~SP4为原边开关管,SS1~SS4为副边开关管;Lr和Cr分别为谐振电感和谐振电容,ir为谐振腔电流;Cin和Co分别为输入侧和输出侧电容;Vin和Vo分别为输入侧和输出侧电压。
传统的间歇控制理论工作波形如图2 所示。当变换器检测到输出电压vo低于滞环下限Vo_burst_min时,变换器工作在谐振频率fr,该段时间为间歇开通时间Tburst_on;当高压侧电压高于滞环上限Vo_burst_max时,变换器停止工作,该段时间为间歇关断时间Tburst_off。
针对图2 所示控制方式存在变换器无法快速切换到最佳输出功率点(从关断时间切换到工作时间时开关频率变化剧烈)的问题,本文提出了一种三脉冲改进型间歇控制策略。所提出的改进型间歇控制理论工作波形如图3 所示。图中vgsP1,P3,S1,S3为开关 管SP1、SP3、SS1、SS3驱动信号,vgsP2,P4,S2,S4为开关管SP2、SP4、SS2、SS4驱动信号;ir和im分别为谐振腔电流和变压器励磁电流;为谐振电容两端电压;Po为输出功率;Pr为谐振腔最佳传输功率。一个间歇周期内,可以划分为4 个阶段,分别是阶段I(建立最佳工作点阶段)、阶段Ⅱ(最佳功率传输上半周)、阶段Ⅲ(最佳功率传输下半周)、阶段IV(输出电容保持阶段)。
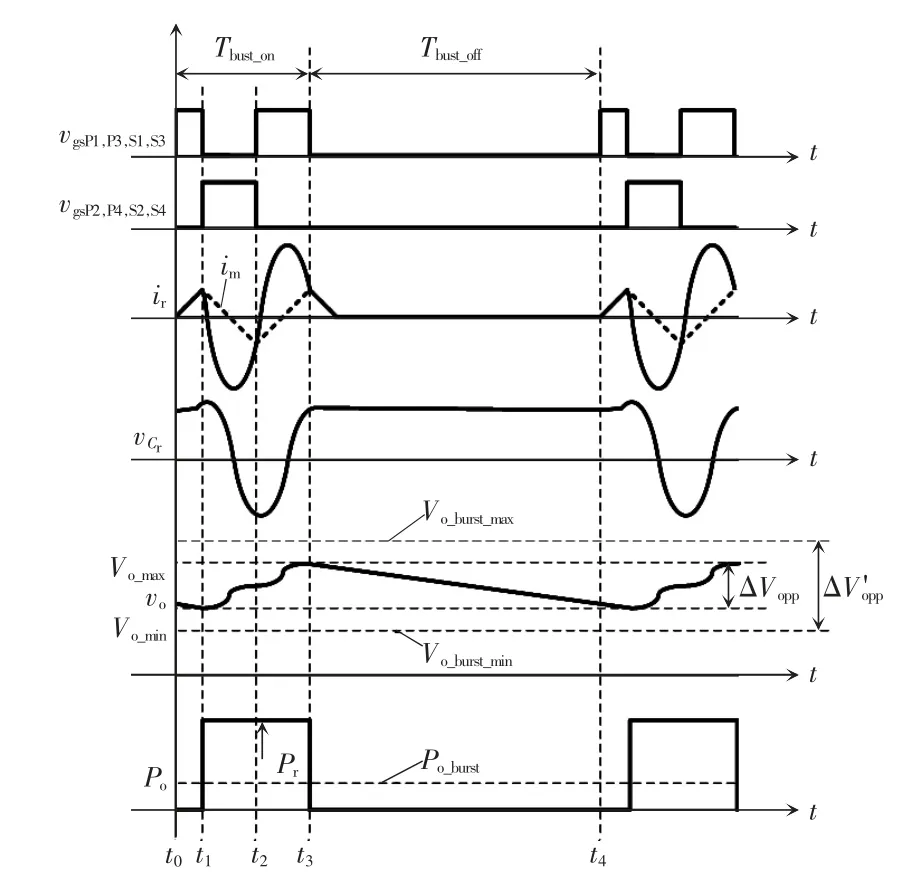
图3 改进型间歇控制理论工作波形Fig.3 Theoretical operating waveforms under improved burst control
阶段I:建立最佳工作点阶段[t0-t1]。该阶段的驱动信号为一个窄脉冲,用于建立最佳工作点,开关管SP1、SP3、SS1和SS3开通,开关管SP2、SP4、SS2和SS4关断,其运行轨迹如图4 中的轨迹I(图中vCrN和irN均为标幺值)。窄脉冲的宽度为1/4 谐振周期。
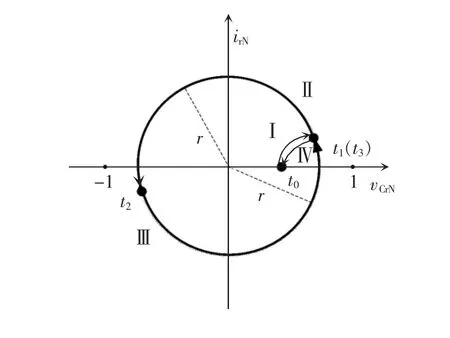
图4 三脉冲运行迹线图Fig.4 Operation trajectory of three pulses
阶段Ⅱ:最佳功率传输上半周[t1-t2]。该阶段的驱动信号为接近50%占空比的正常工作脉冲(开关频率为谐振频率,与阶段Ⅲ相同),开关管SP2、SP4、SS2和SS4开通,开关管SP1、SP3、SS1和SS3关断,其运行轨迹如图4 中的轨迹Ⅱ,变换器运行在最佳工作效率点(与阶段Ⅲ相同),输出电压从最小值Vo_min开始上升。
阶段Ⅲ:最佳功率传输下半周[t2-t3]。该阶段内开关管SP1、SP3、SS1和SS3开通,开关管SP2、SP4、SS2和SS4关断,其运行轨迹如图4 中的轨迹Ⅲ。输出电压持续上升,上升到最大值Vo_max,该阶段结束。改进策略的输出电压纹波为ΔVopp=Vo_max-Vo_min。原有策略的输出电压纹波为=Vo_burst_max-Vo_burst_min。
阶段Ⅳ:输出电容保持阶段[t3-t4]。该阶段内所有开关管均关断,该阶段刚开始的时候,会有短暂的时间谐振腔通过原边开关管上的寄生结电容将能量回馈到输入侧。整个阶段内,变换器靠输出电容维持功率输出,直到下一个间歇工作周期到来。
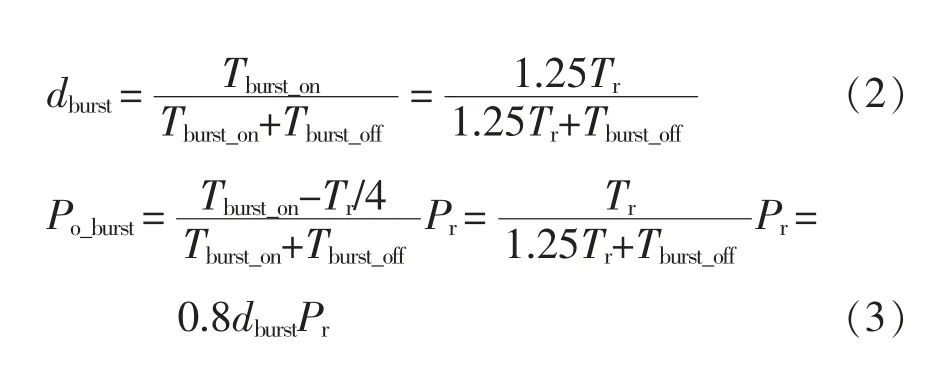
间歇工作频率fburst、间歇工作占空比dburst以及传输到输出侧的平均功率Po_burst分别表示为

2 改进型间歇控制的设计与实现
图5 为改进型间歇控制策略的控制系统框图。图中:GLLC(s)、Go(s)为变换器开环传递函数和负载增益;Kv和Ki为电压采样增益;Vo_ref为给定输出电压;Verror为电压误差;正常工作时,电压误差经过PI运算后得到控制电压信号vctrl,该信号通过压频转换模块输出目标工作频率fsw。间歇工作时,电压误差经过PI 运算后得到间歇工作占空比dburst,再通过三脉冲发生器输出3 个脉冲序列。模式切换器根据输出功率Po的大小自动切换工作模式。
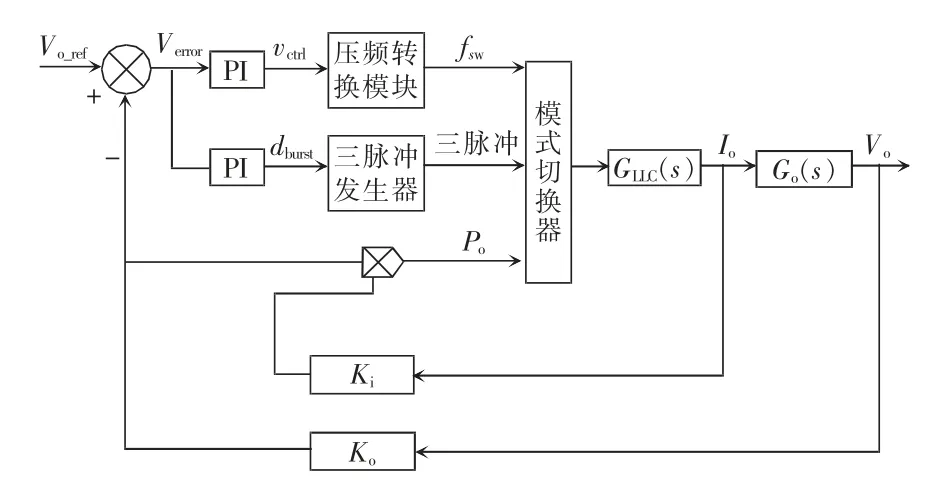
图5 控制系统框图Fig.5 Block diagram of control system
所设计的控制系统有2 种工作模式:基于频率调节的PFM-Mode 和基于间歇工作占空比调节的Burst-Mode,2 种工作模式的分界线即为临界负载。
变换器间歇工作时,开通时间固定,关断时间根据负载大小而变化,负载变小关断时间增大,间歇工作占空比相应减小,从而减小输出功率。由于变换器采用数字控制,其控制信号输出存在滞后,因此关断时间存在最小值,该最小值即为MCU 的中断周期TMCU,表示为

间歇工作占空比最大值Dburst_max表示为

代入式(3)得到Burst-Mode 下的最大负载功率Po_burst_max,该负载即为临界负载,表示为

变换器的模式切换如图6 所示。当实际负载小于临界负载Po_burst_max时,变换器工作在Burst-Mode;当实际负载大于临界负载Po_burst_max时,变换器工作在PFM-Mode。为了避免在分界线附近连续切换,设置了滞环,滞环宽度为ΔP。滞环功率ΔP 的选择应综合考虑变换器在临界负载下的功率波动及Burst-Mode 的有效作用范围。若ΔP 太小,一是稳定运行时的功率波动可能触发模式切换;二是从PFMMode 切换到Burst-Mode 后,输出电压的短时抬升可能触发Burst-Mode 到PFM-Mode 的切换条件,从而造成模式连续切换,引起临界负载附近的不稳定运行;若ΔP 太大,虽然避免了连续切换的风险,但减小了变换器的作用范围。
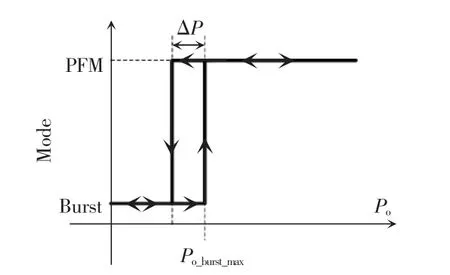
图6 模式切换逻辑Fig.6 Logic of mode switching
本文实验发现,当滞环功率ΔP 在给定的范围内,变换器可以较好地兼顾稳定性和经济性。ΔP 满足

图7 为MCU 中主中断服务程序流程。进入主中断后,首先进行AD 采样处理,更新当前输出电压和输出功率,根据功率大小判断运行模式。若Mode 没有发生变化,则进行相应Mode 的处理,反之,则进入平滑切换准备,确保切换过程不出现开关频率跳变。在BURST-Mode,计算出dburst,并更新到定时器,完成三脉冲的PWM 配置。在PFM-Mode,计算出fsw,并更新到PWM 模块的TBPRD 寄存器中完成连续脉冲的PWM 配置。最后,中断服务程序清除中断标志位并结束。
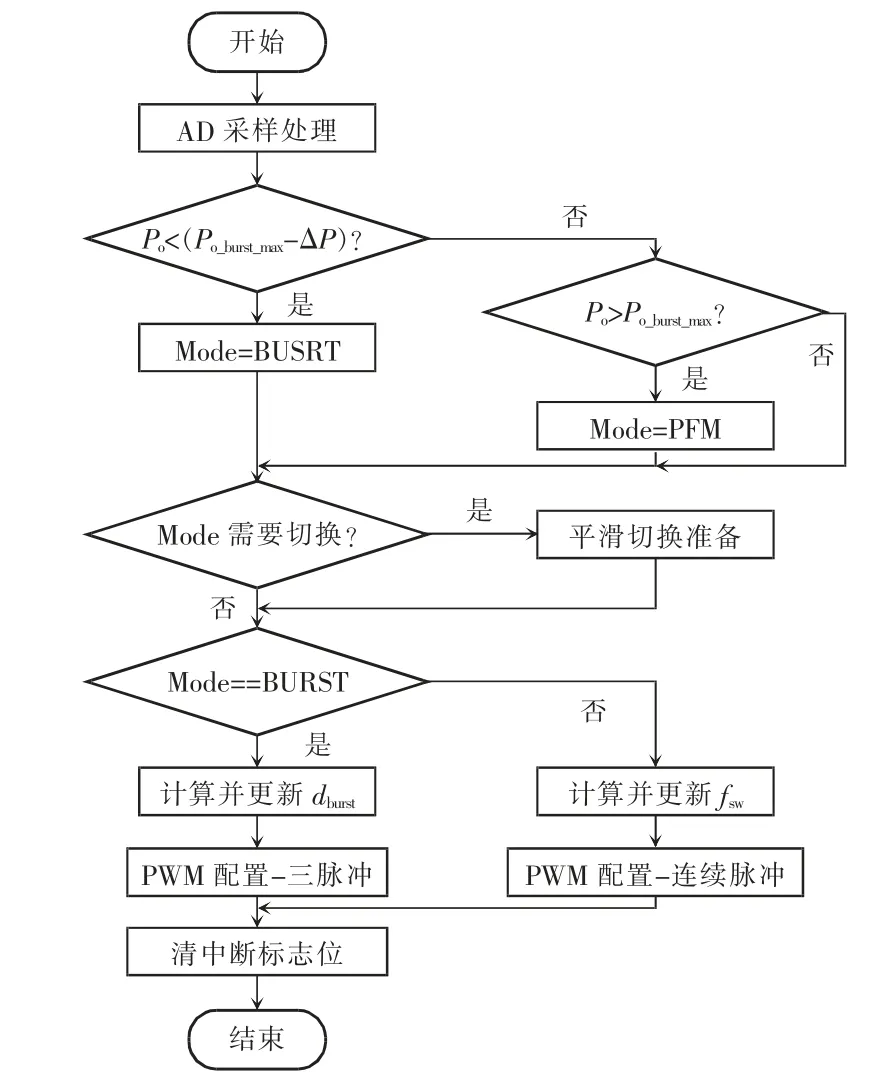
图7 控制系统流程Fig.7 Flow chart of control system
主中断频率为fMCU取值根据MCU 主频fclk、中断任务执行总时钟周期数Ntask、中断利用率ε 等因素进行综合考虑。fMCU的取值应满足

式中,εmax为最大中断利用率设计值,取为80%~85%。
3 实验与分析
设计了一台300 W 样机,样机规格、主要元器件及关键参数如表1 所示。主中断频率fMCU的选择考虑代码的可移植性(兼容TMS320F28027,最高主频60 MHz),系统主频fclk为60 MHz;最大中断利用率εmax为80%;定时器监测主中断满负荷运行的任务执行总时钟周期数Ntask为902。将上述参数代入式(8)计算得到最大主中断频率为53.2 kHz。设置样机主中断频率为50 kHz,正好为设计谐振频率的一半。实测最佳负载点Pr约为60%额定负载;将Tr和TMCU代入式(5)可得Dburst_max=38.5%;将Pr和Dburst_max代入式(6)得临界负载Po_burst_max=55.4W。将Po_burst_max代入式(7)可得滞环功率ΔP 的范围为2.77~5.54 W,本文取ΔP=3W。
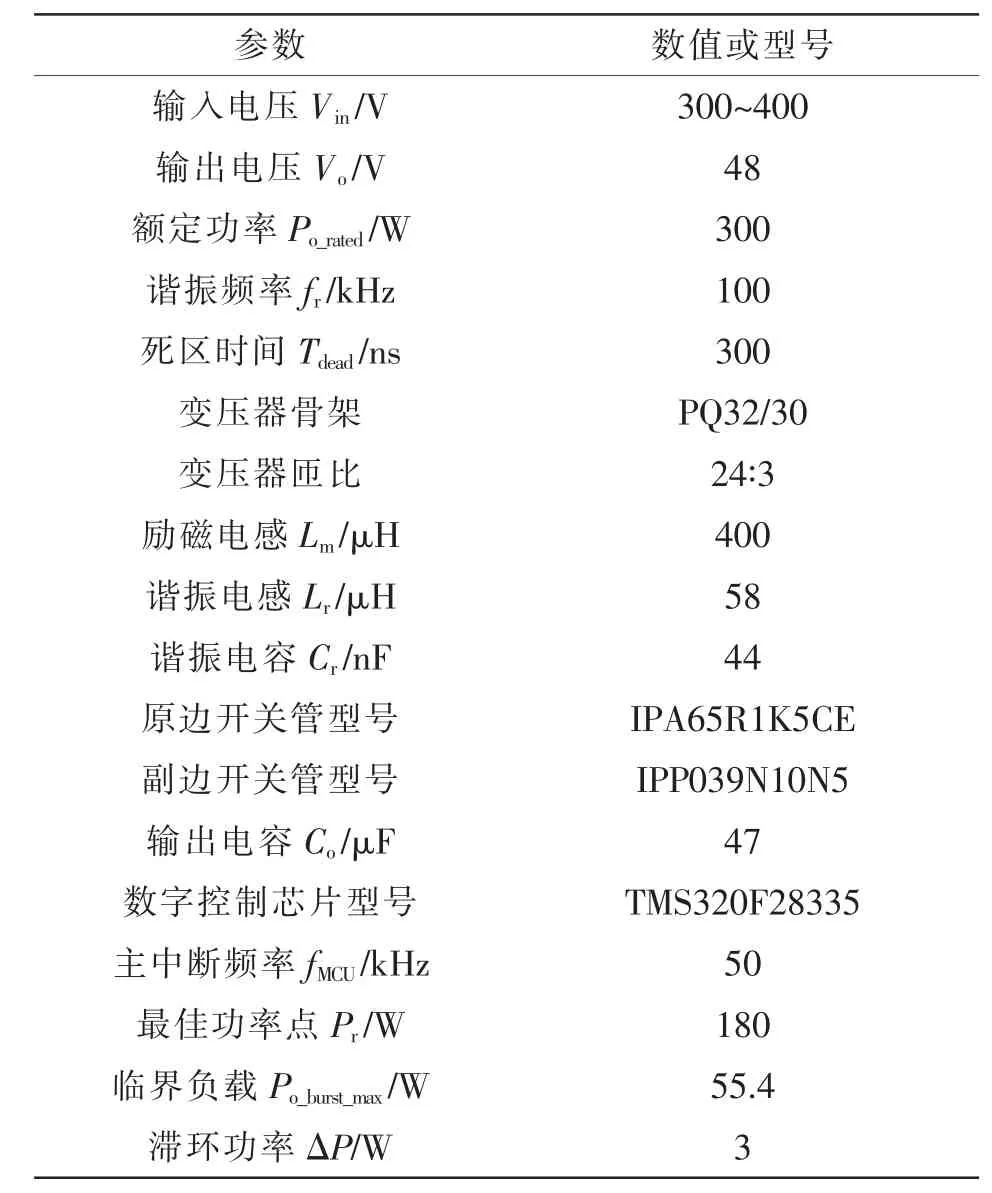
表1 样机规格参数Tab.1 Specification parameters of prototype
图8(a)为临界负载下的实验波形,其间歇工作频率为30.9 kHz,与理论分析一致,该负载条件下输出电压纹波为0.488 V(若采用传统间歇控制,设计电压滞环为0.500 V,实测电压纹波为0.513 V)。图8(b)为30 W 负载下的实验波形,其间歇工作频率为16.8 kHz,输出电压纹波为0.628 V。图8(c)为30~300 W 负载的切换波形,输出电压下降约2 V,切载后大约120 μs 变换器达到稳态,稳态运行时输出电压纹波为0.264 V(若采用传统间歇控制,设计电压滞环为0.5 V,实测电压纹波为0.506 V)。
图8(d)为效率对比图。为了确保效率测量的精度,本文选用更高精度的WT3000(相比于WT1800 系列)作为电气参数测量设备,样机输入侧和输出侧的电压、电流分别接入功率分析仪,实际测量时,根据不同的负载条件调节量程和采样比以确保对应负载条件下测量的准确度。采用频率调节,在5 W 负载下效率仅有71.3 %;采用传统间歇控制,在5 W 负载下效率为79.1%;采用本文所提改进型间歇控制,在5 W 负载下效率为88.2%。5~55 W 范围内共测试12 个负载点,效率最大提高为16.9%,平均提高5.2%。
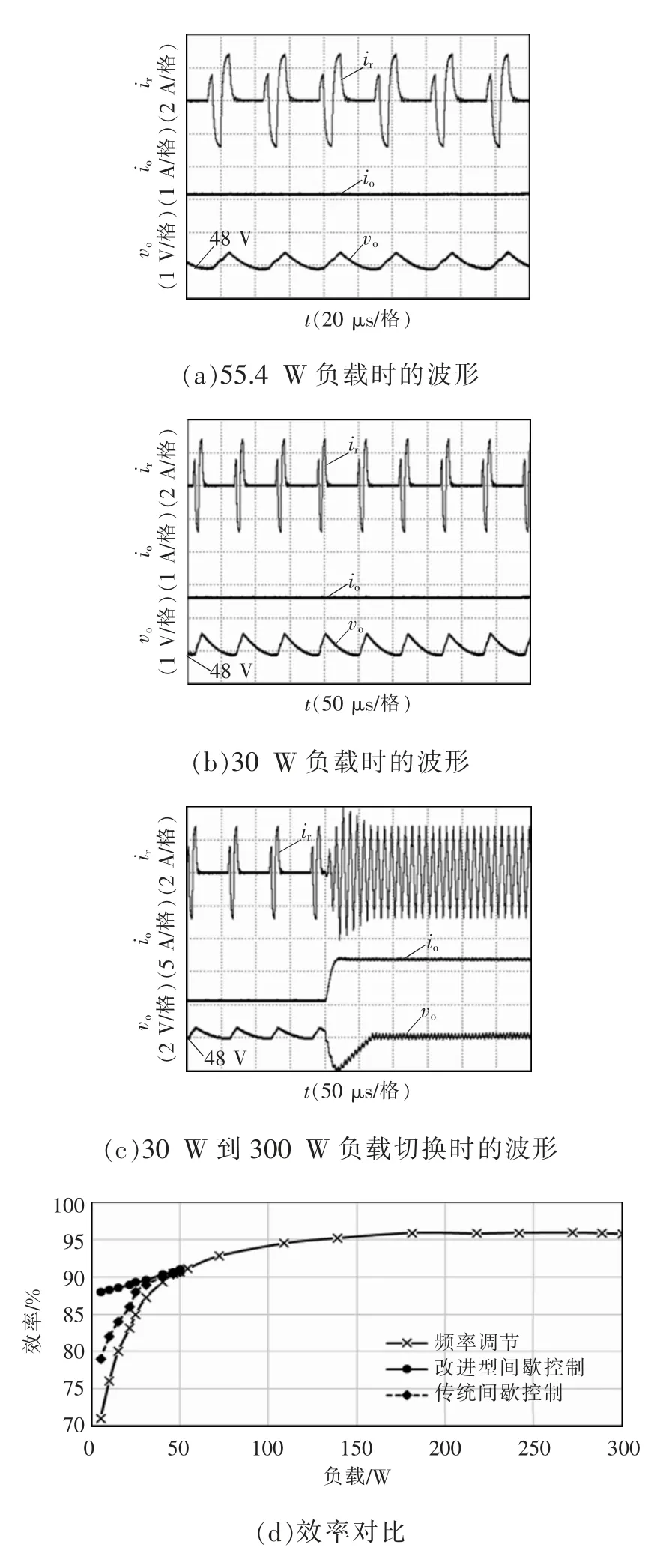
图8 实验波形及效率结果Fig.8 Experimental waveforms and results of efficiency
3 种控制策略的综合对比如表2 所示。从表中可以看出:频率调节方法可以通过硬件或软件实现,复杂度最低,但是在轻载运行时,开关频率会远远大于谐振频率,虽然输出电压纹波低,但是太宽的频率调节范围会造成效率特性差和动态响应特性差,因此工业应用中几乎不考虑该方案;传统间歇控制也可以通过硬件或软件实现,实现复杂度为中等水平,各项性能比较均衡,因此在工业中得到广泛使用;而本文所提改进型控制策略切换逻辑复杂,需要增加功率计算,而且由于不同工作模式下驱动配置不相同,因此只能通过软件方式实现,并且实现复杂度最高。但是相比于传统间歇控制,本文所提控制方法具有输出电压纹波低、轻载效率特性高以及动态响应速度快等优势,随着数字控制电源的不断普及,其实现方式与实现复杂度不会成为其应用障碍。
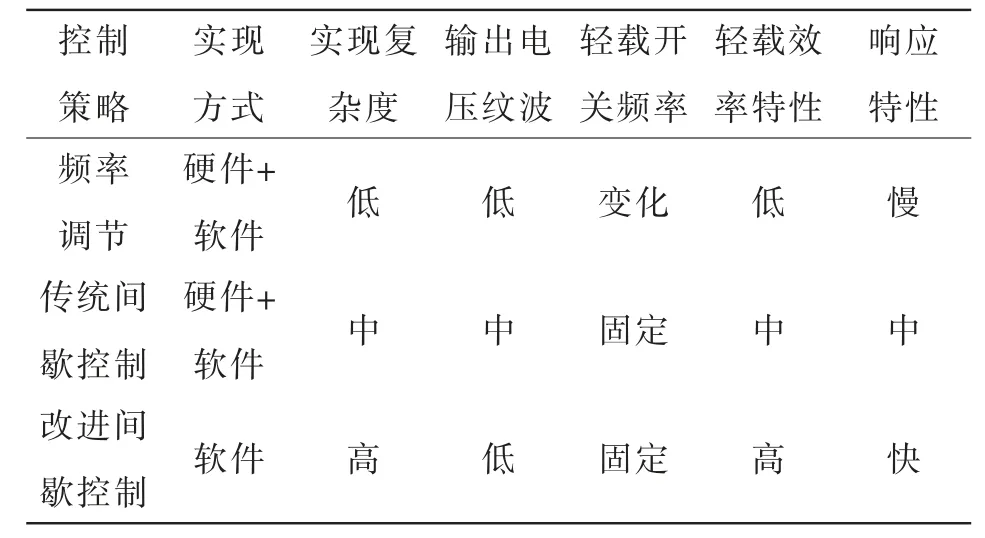
表2 控制策略对比Tab.2 Comparison among control strategies
4 结语
本文提出了一种改进型LLC 谐振变换器间歇控制方法,在间歇工作时间内将驱动脉冲数固定为3 个,其中第1 个脉冲用于快速进入完全谐振点即最高工作效率点,第2 个和第3 个脉冲构成一个完整的开关周期,其开关频率为谐振频率,此时变换器工作在最优轨迹上,系统工作效率最高,并进行了样机验证实验,间歇模式运行段内平均效率提升5.2%,验证了所提控制方法的有效性。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
体育科技文献通报(2022年4期)2022-10-21
体育科技文献通报(2022年3期)2022-05-23
煤气与热力(2022年4期)2022-05-23
湖北工业大学学报(2022年2期)2022-05-07
中小企业管理与科技·上旬刊(2021年10期)2021-09-22
中国空间科学技术(2021年4期)2021-09-03
东坡赤壁诗词(2019年5期)2019-11-14
时代英语·高二(2017年4期)2017-08-11
卷宗(2017年1期)2017-03-17