
含电转气和混合储能的微能网双层滚动优化控制方法
2022-05-11 08:50陈飞雄林炜晖邵振国
电力自动化设备 2022年5期
陈飞雄,林炜晖,邵振国
(1. 福州大学 电气工程与自动化学院,福建 福州 350108;2. 福建省电器智能化工程技术研究中心,福建 福州 350108)
0 引言
微能网是提高能源利用效率的有效途径之一[1],给低碳可持续能源系统的构建带来了新机会,为碳减排提供了新思路[2-3]。电转气P2G(Power-to-Gas)技术的应用促进了可再生能源并网和微能网的耦合程度[4],为消纳可再生能源提供了新途径[5-6]。
目前,可再生能源出力和负荷需求的不确定性给微能网的优化控制带了较大挑战。为此,诸多研究学者将模型预测控制MPC(Model Predictive Con-trol)引入微能网的优化控制中,以应对系统多重不确定性。文献[7-8]针对电热多能源系统,采用MPC有效地解决了预测误差导致的电热多能源系统优化调控方案与实际运行场景偏差较大的问题。文献[9]提出基于MPC 的家庭能源局域网能量管理策略,实现了能量的优化分配。上述文献均采用单一时间尺度的MPC 优化控制方法,即采用短时间尺度或长时间尺度的MPC 优化控制方法。采用单一时间尺度的MPC 优化控制方法虽然在不确定环境下具有较强的鲁棒性,但存在一定的局限性,具体表现为:当采用短时间尺度的MPC 优化控制方法时,为保证系统制定更符合实际运行情况的调度计划,需选取较长的预测时域使MPC 模型包含更丰富的未来信息量,然而当预测时域较长时,MPC模型难以获取未来所有调度时段内较为精确的预测数据[10];当采用长时间尺度的MPC 优化控制方法时,由于长时间尺度的MPC 的预测精度较低,因此其会导致优化控制结果的准确度降低。
采用多时间尺度的优化控制方法通过逐步缩短时间尺度,削减不确定性因素对优化控制结果的影响,可有效解决上述问题。文献[11]考虑了异质能流的传输特性差异和源/荷多重不确定性,构建了“日前调度计划-日内滚动出力计划-实时调度”三阶段调度体系,对异质能流进行了不同时间尺度的调度;文献[12-13]基于MPC方法对多能互补系统进行了日前与日内滚动校正相结合的多时间尺度优化调度。文献[11-13]均是采用基于日前优化调度与日内MPC 滚动优化相结合的多时间尺度优化控制方法,在一定程度上增强了系统对预测信息不准确的适应性,但是日前优化调度下发的计划与实际运行情况存在较大偏差,不利于日内滚动优化跟踪日前调度计划。此外,上述文献主要采用电池作为电储能设备。然而,可再生能源发电和负荷预测在不同的时间尺度下存在不同的波动特征,采用单一电池储能很难在技术经济性上满足其平抑要求[14],因此在微能网中考虑混合储能具有重要意义。
综上,本文首先构建了含P2G和电池-超级电容器混合电储能的微能网系统。然后,在MPC 滚动优化的思想框架下,将长时间尺度和短时间尺度滚动优化控制策略进行有机结合,提出了一种多时间尺度双层滚动优化控制方法。其中,上层长时间尺度滚动优化层以最小化系统运行成本为目标;下层短时间尺度实时滚动调整层跟踪并修正上层调度计划,同时,在短时间尺度MPC 滚动优化平滑系统功率波动的基础上,根据超级电容器的功率特性,进一步应对风光出力和负荷的瞬时功率波动。最后,通过算例分析验证了超级电容器和P2G对降低系统功率波动和提高系统消纳水平的有效性,并验证了本文所提双层滚动优化方法的有效性。
1 基于MPC的微能网双层滚动优化控制方法
1.1 微能网系统结构
本文构建的微能网主要包含了光伏PV(Photo-Voltaic)、风机WT(Wind Turbine)、热电联供CHP(Combined Heat and Power)系统、P2G设备、燃气锅炉GB(Gas Boiler)、电锅炉EB(Electric Boiler)、电池-超级电容器混合电储能设备、储热设备和储气设备,结构如图1 所示。光伏、风机、微型燃气轮机和电储能设备用于满足用户的电负荷需求,缺额部分可通过向电网购电获得,超级电容器用于平抑系统电功率波动;电锅炉、燃气锅炉、余热回收锅炉和储热设备主要用于满足用户的热负荷需求,其中余热回收锅炉用于回收微型燃气轮机发电后排出的余热,实现能源的梯级利用。本文研究的微能网内所涉及的设备的数学模型见附录A。
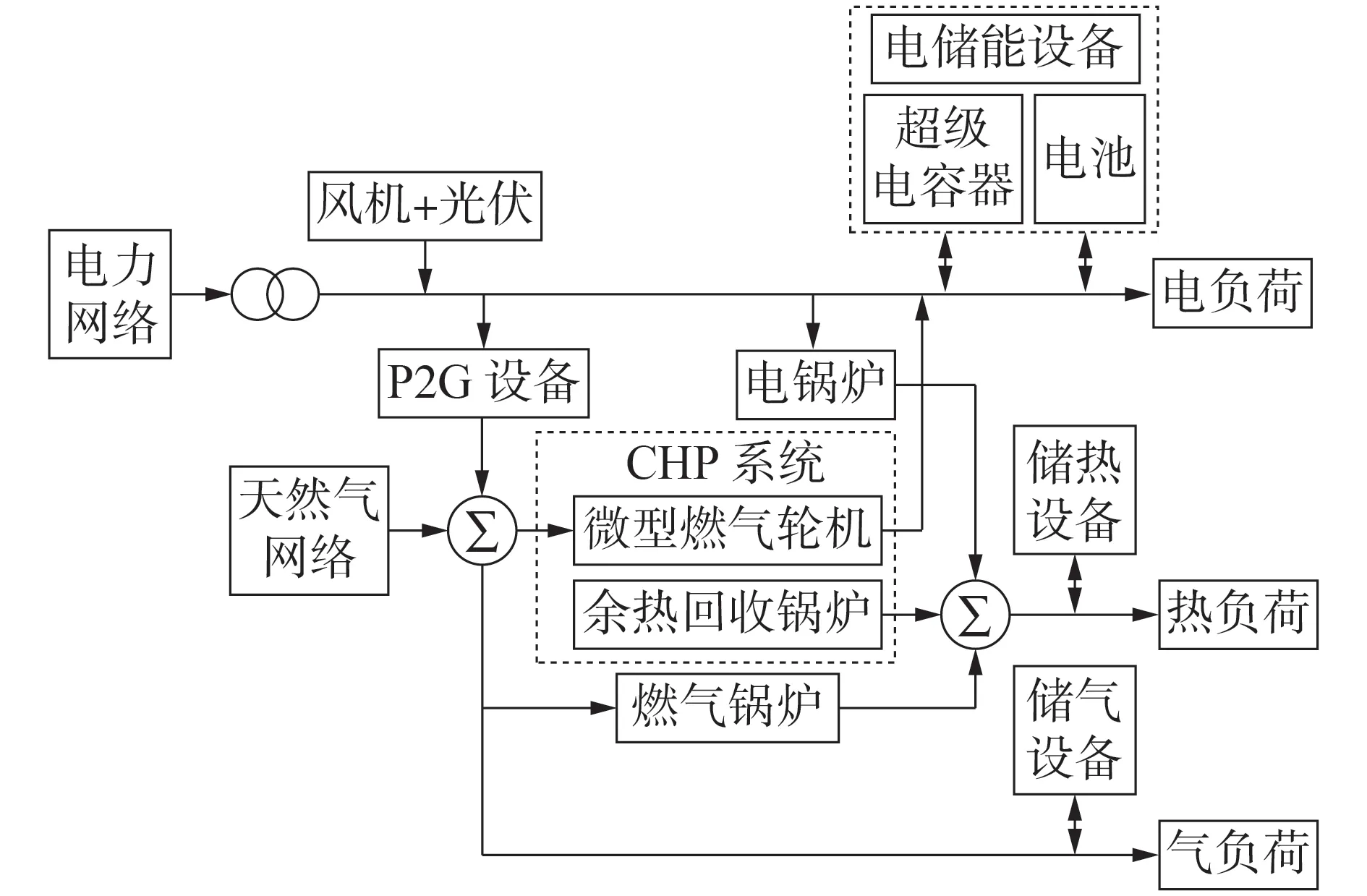
图1 微能网系统结构图Fig.1 Structure of multi-energy microgrid system
1.2 微能网双层滚动优化控制框架
为应对风光出力和负荷需求预测不准确的问题,适应预测误差随预测时间尺度缩短而减小的特性,本文采用双层滚动优化的多时间尺度优化控制方法对微能网进行优化控制,以时段最优代替全局最优,在上层实现最小化系统运行成本的同时,在下层实现跟踪上层调度计划并降低预测误差对系统影响的目标。依据上下层不同的优化控制目标,构建双层滚动优化控制框架如图2 所示。值得注意的是,由于目前已有大量关于风光出力和负荷预测方法方面的研究,如人工神经网络、时间序列、灰色理论和卡尔曼滤波等,故关于风光出力和负荷预测数据,本文采用德国柏林电网公司已有的研究成果,将基于时间序列预测模型得到的风光出力数据[15-16]作为本文进行滚动优化时所用的预测数据。

图2 双层滚动优化控制框架Fig.2 Framework of two-layer receding horizon optimal control
图2 中,上层为长时间尺度滚动优化层,采样时刻为tu∈{0,1,…,Tu-1},Tu为预测时域,Δtu为上层控制时间间隔。在tu时刻,基于未来Tu个控制间隔内风光出力和电/热/气负荷需求的小时级预测数据,综合考虑系统设备运行特性,以最小化系统运行成本为目标,通过优化求解获得预测时域内微能网调度计划,并下发第一个控制间隔内的调度计划值至下层作为参考值。下层为短时间尺度实时滚动调整层,采样时刻为tl∈{0,1,…,Tl-1},Tl为预测时域,Δtl为下层控制时间间隔,即下层将上层滚动优化阶段的控制时间间隔Δtu等分为Tl个控制时间间隔Δtl。在tl时刻,遵照上层对应时段Δtu的调度计划和储能设备充放电状态,并基于下层预测时域内风光出力和负荷需求的分钟级预测数据,对上层调度计划值进行修正,降低风光出力和负荷需求预测误差对优化结果精准性的影响,并调度超级电容器出力,从而进一步平抑风光出力和负荷需求的功率波动导致的联络线电功率和电池出力波动。在Δtu之后,下层将更新后的状态变量反馈至上层,上层开始下一个调度问题。如此重复进行上述步骤,直至生成调度周期内所有时段的调度计划。
1.3 微能网双层滚动优化控制模型
1.3.1 上层长时间尺度滚动优化模型
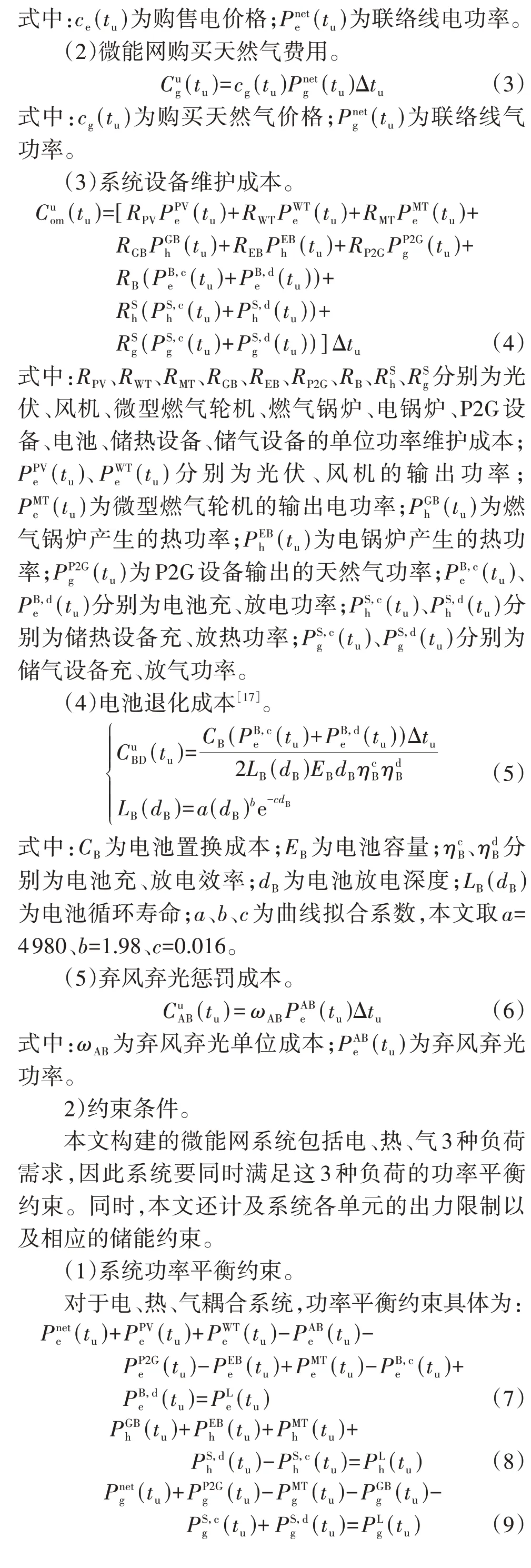
1)目标函数。
上层滚动优化过程中,优化目标为预测时域内微能网运行成本最低。目标函数Fu描述如下:


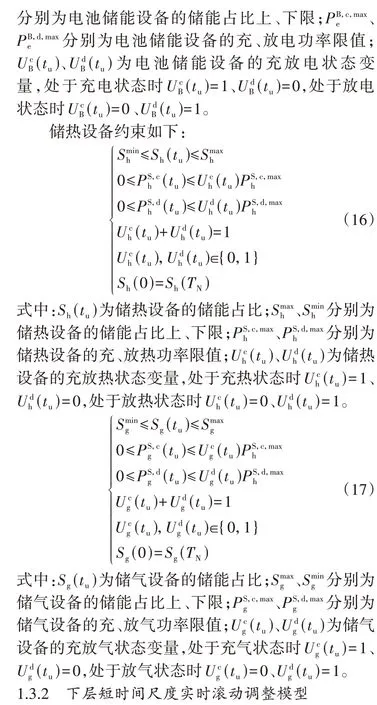
(6)储能设备约束。
储能设备运行受储能占比和最大充放能功率约束。由于同一时刻储能设备只能进行充能或放能,因此,引入0/1 布尔变量用于表示储能设备充放能状态。考虑到下一个调度周期的优化控制方案的制定,调度结束时储能设备的储能占比需恢复至初始储能占比。
电池储能设备约束如下:

1)目标函数。
在短时间尺度实时滚动优化层,为了体现上层调度计划的意义,并进一步降低优化结果与实际运行的偏差,下层细分时间尺度,进行短时间尺度的实时滚动调整,并通过引入超级电容器,进一步平抑风光出力和负荷不确定性所导致的功率波动。基于此,下层以功率修正的惩罚费用和超级电容器在下层预测时域终端保持最佳储能占比所导致的惩罚成本之和最小为目标。值得注意的是,最佳储能占比是为了最大化储能设备平抑下一时刻功率波动的能力而设定的荷电状态,以往研究中,一般定义储能设备的最佳储能占比为0.5[18]。
由于超级电容器的允许循环次数远大于电池,故本文不计超级电容器的退化成本和维护成本[19]。目标函数如下:


需要指出的是,由于每次执行滚动优化时,MPC均需采样并更新预测数据系统状态信息,因此起到了一定的反馈修正作用,可确保滚动优化策略具有更好的准确性和鲁棒性[20]。
2 算例分析
2.1 仿真条件
本文选取某并网运行的微能网为对象进行算例分析。上、下层调度周期分别为TN=24 h、TS=1 h,上、下层控制时间间隔分别为Δtu=1 h、Δtl=15 min,上层预测时域为Tu=24,下层预测时域为Tl=4,本文中控制时域与预测时域保持一致。24 h内风光出力和电、热、气负荷预测功率如附录B 图B1 所示,微能网系统运行参数如附录B 表B1 所示,储能设备相关参数如附录B 表B2 所示,其他参数如附录B 表B3所示。分时电价具体如附录B表B4所示,天然气价格取值为0.26 元/(kW·h),弃风弃光单位成本ωAB=1.7 元/(kW·h)。本文使用MATLAB 的Yalmip工具箱调用CPLEX求解器进行求解。
2.2 不同场景下设备的运行结果分析
为了验证P2G 设备和超级电容器的优势,设定微能网在以下3 种不同场景下运行:场景1,电储能系统只含电池储能单元;场景2,电储能系统为电池-超级电容器混合储能;场景3,在场景2 的基础上,增加P2G设备。
附录B 图B2—B6 展示了在不同场景下,系统电、热、气优化调度结果。
对于场景1,由附录B 图B2—B4 可知,当电价处于谷时段([00:00,07:00)、[23:00,24:00])时,由于此时购电电价为0.17 元/(kW·h),低于天然气价,因此系统通过向电网大量购电以及自身风机的发电来满足电负荷需求。由于夜间风电比较充足,电锅炉作为消耗电能的能源转换设备大量耗电,其产生的热能用以满足夜间较高的热负荷需求。此时,储能设备也开始进行储能,其中电池通过充电来支撑未来用电高峰时段电负荷需求高于风光出力的情况,储热系统将夜间电锅炉产生的多余热能存储起来,储气设备则存储气负荷在低谷时段多余的天然气,起到了削峰填谷的作用。当电价处于平时段([07:00,10:00)、[15:00,18:00)、[21:00,23:00))时,购电电价为0.49元/(kW·h),高于天然气价以及风机和光伏的发电成本,微能网减少购电量,系统主要依靠此时风光出力以及热电联产系统产生的电能满足电负荷需求,热负荷需求则通过燃气锅炉来满足,并由热电联产系统配合运行。此时,电锅炉出力几乎为0,电池根据前后时段电价和电负荷状况决策当前时刻的充放状态,储热设备随着热负荷的波动进行充放能,储气设备继续存储天然气。当电价处于峰时段([10:00,15:00)、[18:00,21:00))时,购电电价上升至0.83元/(kW·h),天然气价远低于购电电价,微型燃气轮机发电成本比购电价格低,能够进行热电联供,综合效率较高,因此微型燃气轮机开始大量消耗天然气供电,并利用发电余热对用户供热,缺额部分由燃气轮机和电锅炉作为补充,多余热能则通过储热设备存储。此时,微能网与天然气网的交互功率达到上限,并且电池与微型燃气轮机配合运行,释放电能,降低系统在用电高峰时段向大电网购电成本。因此,在电价峰时段,系统不仅满足了电负荷需求,而且微能网通过出售过剩电力给大电网以赚取电费差额,提高了全局经济性。
对于场景2,电功率优化调度结果如附录B 图B5 所示。由于MPC 是根据实时预测数据对系统进行动态调整的,所以MPC 优化方法本身具有平滑功率波动的效果,因此在场景1 中,联络线电功率已经较为平滑。在此基础上,场景2 引入超级电容器,一方面,当每小时内联络线电功率未出现波动时,超级电容器作为储能元件参与系统瞬时功率平衡,保证系统运行满足优化目标;另一方面,超级电容器会在联络线电功率波动相对较大的时段做出瞬时响应,通过快速充放电平抑这些时段内联络线电功率的波动,保证联络线电功率的变化稳定在小范围内,进而降低风光出力和负荷需求不确定性给系统带来的负面影响。此外,通过仿真计算得到系统工作在场景1和场景2下的总运行成本分别为1484.2、1463.8元,弃风弃光成本分别为86.93、66.97 元。因此,超级电容器的引入能够在一定程度上减少系统弃风弃光成本。
附录B 图B6 为场景3 下气功率优化调度结果。通过仿真计算得到系统在场景3 下的总运行成本为1 420.0 元,弃风弃光成本为33.90 元。结合图B6 和上述成本可知,弃风主要集中在[00:00,07:00]和[23:00,24:00]时段,这些时段为风电出力高峰期,加入P2G 设备后,在弃风时段通过P2G 将电能转化为天然气,从而进一步降低系统弃风弃光量,使系统的可再生能源消纳水平显著提升,并且提高了系统经济性,证明了含P2G 的微能网系统在风光消纳方面具有独特优势。
2.3 不同预测时域下的结果分析
为了验证本文优化控制方法的合理性和有效性,设定上层预测时域Tu=4,8,12,24,48,72 这6 种对比场景,得到系统运行结果如图3所示。

图3 不同预测时域下系统运行结果Fig.3 Results of system operation under different prediction horizons
图3(a)描述了电池储能占比在不同预测时域下的变化趋势。从图中可以看出,预测时域尚未达到24 时,电池的储能占比随预测时域的不同发生较明显变化:当Tu=4,8,12时,电池储能占比变化范围相较于其他预测时域更小,并且预测时域越小,电池储能占比的变化范围越小;当Tu=24,48,72时,电池储能占比在每一时段的大小基本一致,这是由于当预测时域达到24 时,风光出力、负荷需求和电、气价格信息分布遵循相似的日模式,使得预测时域的长度对电池储能占比的影响显著减小。图3(b)表明尽管预测时域的长度不同,但24 h 内的平均运行成本并没有随着预测时域的不同而发生很大的变化,因此可根据系统实际调度需求灵活选取上层预测时域的大小。此外,随着上层预测时域的增大,上层计算时间增加,而下层计算时间基本不变,这是由于上层预测时域越大,所包含的预测信息越丰富,相应地会使得上层求解优化问题时计算量增大,而下层预测时域保持不变,计算复杂度也会相应保持不变。然而,由于计算时间比相应的时间间隔短得多,因此双层滚动优化控制方法能够确保在下一个调度时刻到来之前获得当前时刻的最优调度结果,即具有实时响应能力,这说明该系统优化问题的求解速度满足系统的需求。
2.4 不同预测误差下的结果分析
风光出力和负荷预测误差是系统不确定性的重要表现形式,因此有必要分析不同的风光出力和负荷预测误差对系统优化调度结果的影响。图4 展示了下层预测数据误差分别为5%、10%、15%、20%时系统的运行结果。图4(a)中,在不同预测误差下电池储能占比曲线基本重合,这表明预测误差的增大对电池储能占比的影响较小,而从图4(b)中可以看出,预测误差的增加会给超级电容器储能的输出带来更多的波动,这是因为平滑电池在短时间尺度内的输出功率波动是实时滚动调整的主要目标之一。图4(c)表明随着预测误差的增大,24 h 内的平均运行成本和电池平均退化成本均无显著变化,这是由于电池主要在上层进行长时间尺度的调度,而下层的瞬时功率平衡则通过调度超级电容器来实现。

图4 不同预测误差下系统运行结果Fig.4 Result of system operation under different prediction errors
2.5 与已有优化控制方法的对比分析
为验证本文优化控制方法的优势,在2.2节的场景3 下,将基于日前优化调度与日内MPC 滚动优化相结合的优化控制方法与本文所提出的双层滚动优化控制方法进行比较,设定了如下2 种对比情景:情景1(采用基于日前优化调度与日内MPC 滚动优化相结合的优化控制方法),上层为日前优化调度,下层根据日前优化调度计划,基于MPC 的滚动优化求解微能网系统日内修正方案;情景2(采用双层滚动优化控制方法),上层为长时间尺度滚动优化,用有限时段的反复滚动优化代替一次离线全时段优化,下层根据上层调度计划,通过短时间尺度滚动优化对上层计划值进行修正。
由于日前优化调度周期为24 h,时间尺度为1 h,为保证上层预测时域一致,故在2种情景中均设置上层预测时域Tu=24,时间尺度为1 h;根据MPC原理,每次只下发第一个控制间隔内的调度计划值至下层作为参考值,故在2 种情景中均设置下层预测时域Tl=4,时间尺度为15 min。
以根据实际风光出力、各类负荷需求数据求得的理想运行结果为参照,对比2 种情景下根据预测数据求得的微能网联络线电功率、电池出力在每个15 min时段的绝对误差和相对误差。

式中:Ps为设置的平移量,本文取Ps=1 kW。
2 种情景下微能网联络线电功率和电池出力的每15 min 绝对误差和相对误差对比如图5 和附录B图B7、B8 所示。由图可知,总体上情景2 下的绝对误差和相对误差比情景1 小很多,原因是基于日前调度与日内MPC 滚动优化相结合的多时间尺度优化控制方法,是将日前调度阶段的调度计划一次性下发,因此可能出现因可再生能源出力预测精度较低而导致优化控制方案与实际运行情况偏差较大的问题。在此基础上,日内滚动根据实时预测数据对日前调度计划进行修正,这样进行修正后所得到的实际调度结果也不够准确,进而给微能网和上游网络的安全运行带来负面影响。而情景2 的上层采用长时间尺度滚动优化方法,系统在进行上层滚动优化调度时,根据每小时最新风光出力、负荷信息和系统状态,生成实时计划下发,可以更好地前瞻未来一段时间的调度需求,因此可提前对可控机组和储能设备的出力进行调整,使得下层对计划值进行修正时求解得到的实时调度结果更趋近于理想运行结果,有效削弱可再生能源和负荷的不确定性影响。因此,本文提出的双层滚动优化控制方法提升了系统适应不确定性的能力,并能给出更精确的调度方案。
通过仿真计算得到2 种情景下系统运行成本分别为1 443.4 元和1 420.0 元。可以看出,在运行费用方面,情景2 相对于情景1 降低了1.62%,可见本文采用的双层滚动优化控制方法在保证系统经济运行的条件下,更能适应系统随机性,制定更精确的调度决策。
结合图5(a)和2 种情景下系统运行成本可知,情景2 的运行成本较情景1 未有明显降低的原因是情景2 下每一时段内的功率绝对误差较小,故运行成本相较于理想成本的误差也较小。而对于情景1,绝对误差较大包含优化结果较理想结果偏低和偏高2 种情况,则每一时段内的系统的运行成本较理想成本也会偏低或者偏高,从而可能导致总运行成本接近理想总成本。因此,较小的绝对误差不一定会造成总运行成本明显降低。
为进一步验证不确定性环境下双层滚动优化控制方法的有效性,在上层风光出力和负荷预测值的基础上,叠加3 种不同等级的波动,等级1—3的波动率分别为10%、20%、30%。通过仿真计算,对比情景1和情景2下不同波动等级的运行成本:情景1在3种波动等级下的总运行成本分别为1419.9、1 430.6、1 437.2 元,情景2 在3 种波动等级下的总运行成本分别为1 450.8、1 481.1、1 516.2 元。可以看出,在3 种波动等级下,情景1 较情景2 在运行成本上分别降低了2.13%、3.42%、5.21%。可见不同波动等级下采用双层滚动优化控制方法均可有效保证系统的经济运行,并且随着波动等级的增大,情景1较情景2的经济性能不断提升,这是因为情景1的上层是基于日前优化调度的一次离线全时段优化,而情景2 的上层通过滚动时域不断更新系统预测信息和状态信息,以有限时段最优代替全时段最优,使得系统在不确定环境下具有更强的鲁棒性。
3 结论
本文构建了含P2G 设备和电池-超级电容器混合储能的微能网系统,在此基础上,针对考虑微能网不确定性的优化控制问题,提出了一种基于双层滚动优化的多时间尺度优化控制方法。该方法在保证系统消纳能力和经济运行的同时,提升了微能网系统应对不确定性的能力,得到的主要结论如下:
1)随着超级电容器和P2G 设备的引入,运行成本不断减小,系统消纳能力不断提高,体现了本文所提系统模型的优势;
2)所提双层滚动优化控制方法在不同预测时域和预测误差下,均能保证微能网平均运行成本基本保持不变;
3)与日前优化调度结合日内MPC 滚动优化方法相比,所提双层滚动优化方法在保证系统运行成本的前提下,可以更有效地应对系统在不确定性环境下因日前优化调度对预测精度依赖性强所导致的调度计划与实际运行场景偏差较大的问题,使得系统在不确定性环境下具有较强的鲁棒性。
附录见本刊网络版(http://www.epae.cn)。
猜你喜欢
力学学报(2021年7期)2021-11-09
哈尔滨工程大学学报(2021年10期)2021-11-05
能源工程(2021年1期)2021-04-13
苏州科技大学学报(自然科学版)(2021年1期)2021-03-24
苏州科技大学学报(自然科学版)(2020年1期)2020-04-13
军事运筹与系统工程(2019年4期)2019-09-11
宇航计测技术(2019年1期)2019-03-25
雷达学报(2017年6期)2017-03-26
杭州(2016年1期)2016-08-15
风能(2016年3期)2016-07-05
