柔性多自由度力-位移混合控制在结构循环往复试验中的应用研究
2022-04-04 05:39高梦茹LINDENNige1周惠蒙王涛李梦宁
振动工程学报 2022年1期
关键词:PID控制
高梦茹 LINDEN Nige1 周惠蒙 王涛 李梦宁
摘要:如何模拟试验体在结构中受到的真实边界条件是决定结构试验结果正确性的关键问题,即在边界加载点上实现多自由度系统的命令的准确加载。土木T程结构(或构件)一般竖向刚度大,在重力荷载作用下各个自由度之问存在较强的耦合作用,采用传统方法多个作动器单独加载控制精度低,甚至会出现加载控制失稳的现象。针对这个问题,发展一种可以根据试验体和试验装置特点灵活选择控制点自由度和作动器的力或位移控制方式的混合控制方法,即柔性多自由度力一位移混合控制(FMFDC)策略,提出广义刚度矩阵来近似等效试验体的力位移关系,并基于广义刚度矩阵设计力一位移转换系数矩阵,采用坐标转换雅可比矩阵将加载装置的几何非线性线性化,采用比例一积分一微分控制方法(PID控制方法)保证各自由度的稳态误差满足精度要求,最终实现多自由度协调加载。基于柔性多自由度力位移混合控制方法分别建立了六自由度和平面内三自由度加载平台,以小型铁皮筒试验体和足尺钢柱的循环往复试验进行验证,试验结果验证了这种控制方法的可行性和适用性,
关键词:循环往复试验;抗震结构;PID控制;柔性力一位移混合控制;力位移转换系数矩阵
中图分类号:TU352.11,TU317
文献标志码:A
文章编号:1004 -4523(2022)01-0013-10
DOI: 10.1638 5/j .cnki.issn.10044523.2022.01.002
引 言
结构试验[1-2]和有限元模拟是结构抗震的两种主要研究手段,而循环往复试验是结构试验方法中使用率最高的,更是检验工程结构或结构构件抗震能力的重要技术手段,可以进行足尺整体结构或梁、柱、节点等结构构件的抗震能力评估。
整体结构试验由于结构的体量较大、白由度较多等原因需要多个作动器同时加载。对节点或梁、柱进行循环往复试验时,由于其是结构中承载重力荷载的部件,受到连接的梁、柱等构件的荷载作用,为了模拟其在结构中真实受力状态,需要采用多个作动器同时进行试验体边界条件的加载[3]。与子结构混合试验[4-6]类似,构件也可以看成是整体结构的子结构,子结构的边界往往包含多个白由度,由于土木结构刚度较大,各个白由度相互耦合较强,这给协调加载带来了一定的困难。具体表现在两个方面:桥墩、节点、柱等构件竖向刚度大,采用位移控制加载时,控制误差导致力的误差,直接采用力控制,在试验体破坏阶段存在安全隐患;另一方面,转动白由度的加载需要组合多个作动器来实现,作动器位移/与加载控制点笛卡尔坐标系位移/力之间存在几何变换关系,即几何非线性问题。因此多白由度循环往复试验中协调控制有难度。
在以往的试验中通常通过力一位移混合控制加载方案解决这一问题[7],文献[8-10]提出了一种力一位移混合控制策略,作动器采用位移控制,加载点的竖向白由度控制目标为力,其他白由度目标为位移,采用拟牛顿迭代实现作动器位移与笛卡尔坐标系位移之间的变换;同时采用BFGS( Broyden,Fletcher,Goldfarb,Shanno)迭代方法由白由度上的力/位移命令和响应求解出施加给作动器的位移命令,由于力响应存在噪声,迭代求解过程易出现反复加载不收敛,因此对非线性试验体存在加载路径的问题。Pan等[11]提出在多白由度结构循环往复试验中,多个作动器平行加载,变形最大的作动器采用位移控制,其他作动器采用力控制,它们的目标力由位移控制作动器的反力按照倒三角成一定比例施加,通过数学迭代,修正力命令来保证地震力的倒三角施加。
以上两种方案都需要迭代,存在加载路径问题。Wang等[12]采用外接位移传感器获取白由度的反馈,某个作动器采用力的控制来释放多个作动器同时加载时对试验体的过约束,进行了力一位移混合控制。曾聪,许国山等[13-17]提出基于双闭环的力一位移混合控制方法进行了三白由度的加载,基于初始刚度矩阵设计力位移转换系数(矩阵),主要针对竖向力控制,其他白由度位移控制加载结构试验进行了研究。周惠蒙等[18]提出多白由度力位移混合解耦控制方法,应用在三白由度子结构混合试验中,其坐标变换矩阵是时变的。
本文分别以铁皮筒试验体六白由度力位移混合加载和平面三白由度足尺钢柱循环往复试验为案例,介绍了柔性多白由度力位移混合控制平台搭建和试验的基本流程,并将基于试验结果分析这一方法的可行性和适用性。
1 柔性多自由度力一位移混合控制方法原理
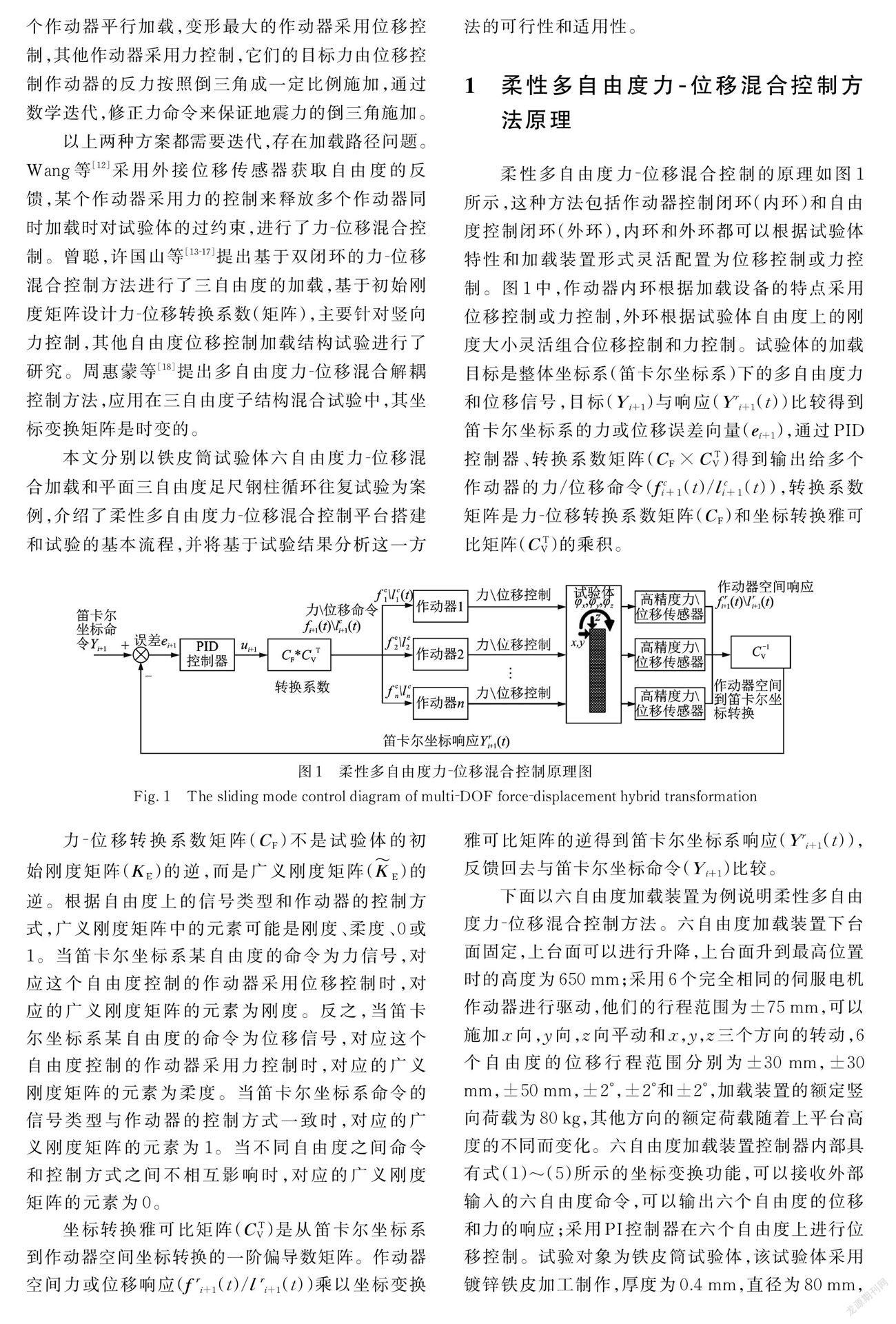
柔性多白由度力一位移混合控制的原理如图1所示,这种方法包括作动器控制闭环(内环)和白由度控制闭环(外环),内环和外环都可以根据试验体特性和加载装置形式灵活配置为位移控制或力控制。图1中,作动器内环根据加载设备的特点采用位移控制或力控制,外环根据试验体白由度上的刚度大小灵活组合位移控制和力控制。试验体的加载目标是整体坐标系(笛卡尔坐标系)下的多白由度力和位移信号,目标(Y i+1)与响应(Y i+1(t))比较得到笛卡尔坐标系的力或位移误差向量(e i+1,),通过PID控制器、转换系数矩阵(CF×CyT)得到输出给多个作动器的力/位移命令( ),转换系数矩阵是力位移转换系数矩阵( CF)和坐标转换雅可比矩阵(CyT)的乘积。
力一位移转换系数矩阵( CF)不是试验体的初始刚度矩阵(KE)的逆,而是广义刚度矩阵(KE)的逆。根据白由度上的信號类型和作动器的控制方式,广义刚度矩阵中的元素可能是刚度、柔度、O或1。当笛卡尔坐标系某白由度的命令为力信号,对应这个白由度控制的作动器采用位移控制时,对应的广义刚度矩阵的元素为刚度。反之,当笛卡尔坐标系某白由度的命令为位移信号,对应这个白由度控制的作动器采用力控制时,对应的广义刚度矩阵的元素为柔度。当笛卡尔坐标系命令的信号类型与作动器的控制方式一致时,对应的广义刚度矩阵的元素为1。当不同白由度之间命令和控制方式之间不相互影响时,对应的广义刚度矩阵的元素为0。gzslib202204041544坐标转换雅可比矩阵(CyT)是从笛卡尔坐标系到作动器空间坐标转换的一阶偏导数矩阵。作动器空间力或位移响应 ( )乘以坐标变换雅可比矩阵的逆得到笛卡尔坐标系响应( ),反馈回去与笛卡尔坐标命令(Y i+1)比较。
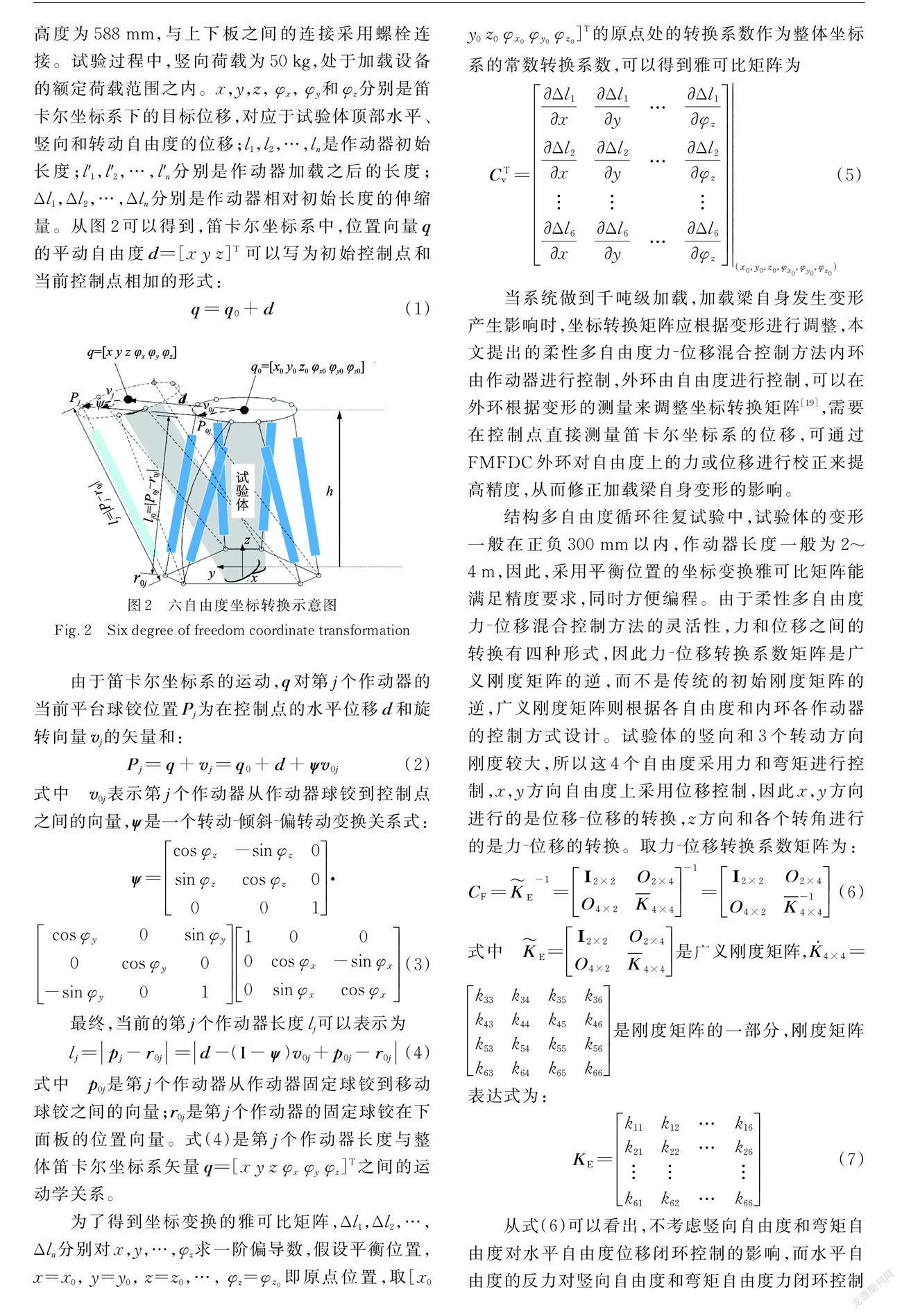
下面以六白由度加载装置为例说明柔性多白由度力一位移混合控制方法。六白由度加载装置下台面固定,上台面可以进行升降,上台面升到最高位置时的高度为650 mm;采用6个完全相同的伺服电机作动器进行驱动,他们的行程范围为±75 mm,可以施加x向,y向,z向平动和x,y,z三个方向的转动,6个白由度的位移行程范围分别为±30 mm,±30mm,±50 mm,±2°,±2°和±2°,加载装置的额定竖向荷载为80 kg,其他方向的额定荷载随着上平台高度的不同而变化。六白由度加载装置控制器内部具有式(1)~(5)所示的坐标变换功能,可以接收外部输入的六白由度命令,可以输出六个白由度的位移和力的响应;采用PI控制器在六个白由度上进行位移控制。试验对象为铁皮筒试验体,该试验体采用镀锌铁皮加工制作,厚度为0.4 mm,直径为80 mm,高度为588 mm,与上下板之间的连接采用螺栓连接。试验过程中,竖向荷载为50 kg,处于加载设备的额定荷载范围之内。x,y,z,φx,φy和φz分别是笛卡尔坐标系下的目标位移,对应于试验体顶部水平、竖向和转动白由度的位移;l1,l2,…,ln是作动器初始长度;l1,l2,…,ln分别是作动器加载之后的长度;△l1,△l2,…,△ln分别是作动器相对初始长度的伸缩量。从图2可以得到,笛卡尔坐标系中,位置向量q的平动白由度d=[xyz]T可以写为初始控制点和当前控制点相加的形式:
由于笛卡尔坐标系的运动,q对第i个作动器的当前平台球铰位置Pj为在控制点的水平位移d和旋转向量vj,的矢量和:
当系统做到千吨级加载,加载梁白身发生变形产生影响时,坐标转换矩阵应根据变形进行调整,本文提出的柔性多白由度力一位移混合控制方法内环由作动器进行控制,外环由白由度进行控制,可以在外环根据变形的测量来调整坐标转换矩阵[9],需要在控制点直接测量笛卡尔坐标系的位移,可通过FMFDC外环对白由度上的力或位移进行校正来提高精度,从而修正加载梁白身变形的影响。
结构多白由度循环往复试验中,试验体的变形一般在正负300 mm以内,作动器长度一般为2~4 m,因此,采用平衡位置的坐标变换雅可比矩阵能满足精度要求,同时方便编程。由于柔性多白由度力一位移混合控制方法的灵活性,力和位移之间的转换有四种形式,因此力一位移转换系数矩阵是广义刚度矩阵的逆,而不是传统的初始刚度矩阵的逆,广义刚度矩阵则根据各白由度和内环各作动器的控制方式设计。试验体的竖向和3个转动方向刚度较大,所以这4个白由度采用力和弯矩进行控制,x,y方向白由度上采用位移控制,因此x,y方向进行的是位移一位移的转换,z方向和各个转角进行的是力一位移的转换。取力一位移转换系数矩阵为:
从式(6)可以看出,不考虑竖向白由度和弯矩白由度对水平白由度位移闭环控制的影响,而水平白由度的反力对竖向白由度和弯矩白由度力闭环控制的影响在控制中也不被考虑。
柔性多白由度力一位移混合控制方法包括内环和外环两层控制闭环,可对作动器内环控制器进行位移限值设置,当加载试件发生脆性破坏时,位移增加较大,超过限值就会切断油源,从而达到保护系统安全的效果。本文的三白由度試验装置中外环控制策略为:水平位移控制、垂直和转动力控制;作动器的控制策略为:水平作动器力控制和两个垂直作动器位移控制。这种控制策略可以对作动器控制设置位移限值,当试验体发生脆性破坏时,作动器位移会超过安全的行程范围,从而触发位移限值保护,切断油源,卸掉加载力,保证试验体脆性破坏时人员、加载设备和测量设备的安全。
如图1所示,针对笛卡尔坐标系上各白由度命令和响应之间的误差,采用PID控制器进行控制来减少误差:
引入比例积分(PID)控制以后,系统在阶跃输入下是零稳态误差的,这样可以保证即使试验体存在非线性,在较长时间的调整之后,笛卡尔坐标系上力和位移的响应可以无稳态误差地跟踪命令。由于本研究主要针对拟动力试验和伪静力试验的需要设计,因此通过设计较长的加载时间步,可以达到力和位移响应较好地跟踪命令的目的[18]。
2 六自由度试验验证
六白由度加载装置试验验证时坐标变换是系统自带的,外环控制器的变换和力一位移变换是根据编程实现的,且六白由度加载装置试验验证的模型为铁皮筒试验体,此时柔性多白由度力一位移混合控制方法的模型变换只包括力一位移变换;而三白由度加载装置试验验证时的变换都是根据真实情况进行编程从而实现的,且三白由度加载装置试验验证的模型为方钢管柱,此时柔性多白由度力一位移混合控制方法的模型变换包括力一位移变换和坐标变换。文章对于试验验证的介绍遵循的原则是由小型到足尺模型,由部分验证到整体验证,上一章已经以六白由度加载装置为例对柔性多白由度力一位移混合控制方法进行了公式推导,下面继续介绍六白由度加载装置试验验证过程。外环采用力一位移混合控制,内环采用位移控制,在六白由度运动平台上进行铁皮筒试验体六白由度力一位移混合加载循环往复试验,验证柔性多白由度力一位移混合控制方法的可行性。
2.1试验装置
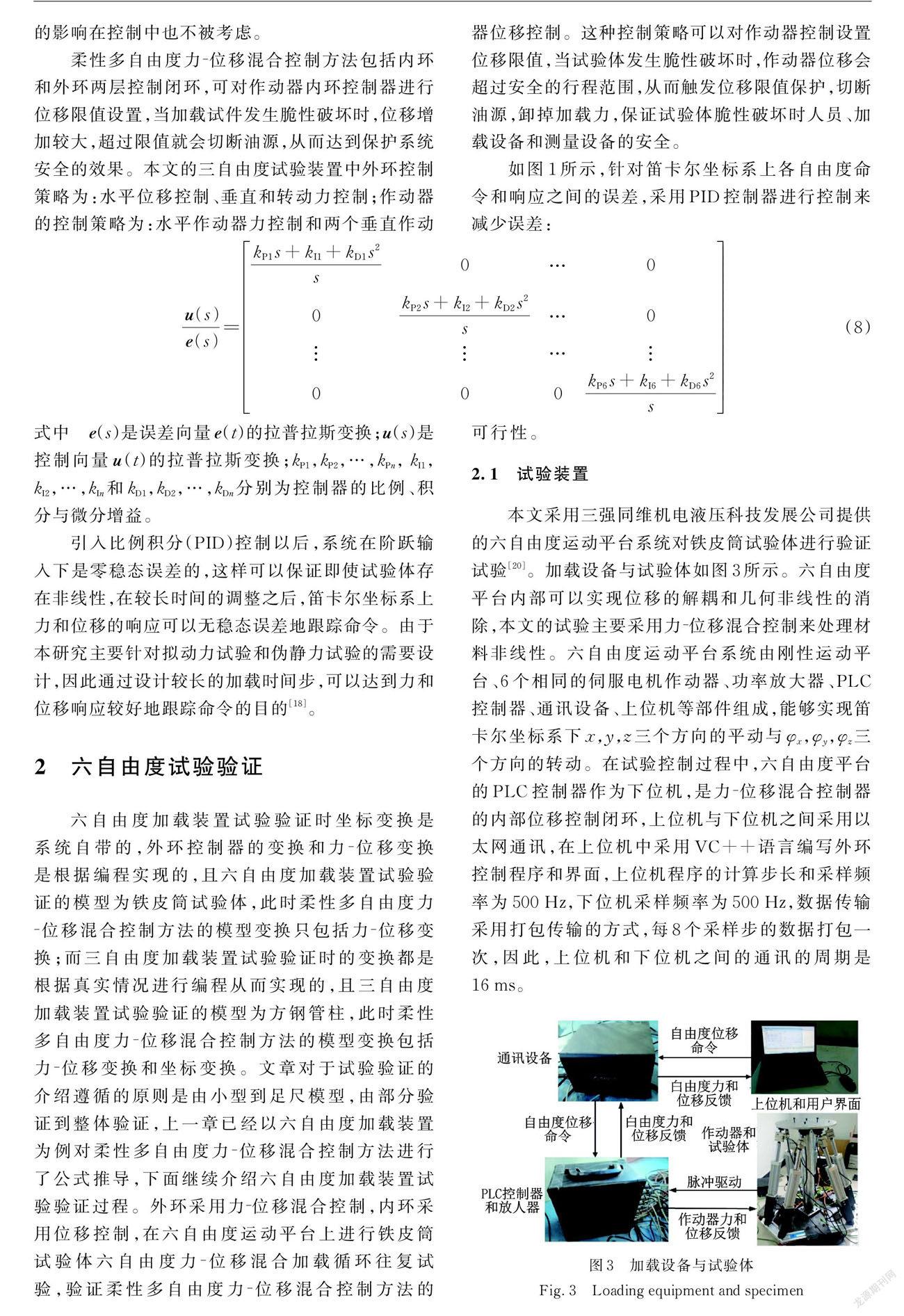
本文采用三强同维机电液压科技发展公司提供的六白由度运动平台系统对铁皮筒试验体进行验证试验[20]。加载设备与试验体如图3所示。六白由度平台内部可以实现位移的解耦和几何非线性的消除,本文的试验主要采用力一位移混合控制来处理材料非线性。六白由度运动平台系统由刚性运动平台、6个相同的伺服电机作动器、功率放大器、PLC控制器、通讯设备、上位机等部件组成,能够实现笛卡尔坐标系下x,y,z三个方向的平动与φx,φy,φz三个方向的转动。在试验控制过程中,六白由度平台的PLC控制器作为下位机,是力一位移混合控制器的内部位移控制闭环,上位机与下位机之间采用以太网通讯,在上位机中采用VC++语言编写外环控制程序和界面,上位机程序的计算步长和采样频率为500 Hz,下位机采样频率为500 Hz,数据传输采用打包传输的方式,每8个采样步的数据打包一次,因此,上位机和下位机之间的通讯的周期是16 ms。gzslib2022040415452.2 铁皮筒试验体试验
为了验证柔性多白由度力一位移混合控制方法对强耦合试验体的控制效果,本文对一个刚度大、耦合较强的铁皮筒试验体进行了加载试验。试验体参数在第一节已介绍,采用摄动法,经过小位移下的预实验测试,得到试验体每个白由度在线性范围内的力一位移曲线,然后对力一位移曲线进行一阶线性拟合,将拟合得到的斜率作为这个白由度刚度,将各个白由度的刚度组合可得到初始刚度矩阵为:其中,位移、力、角度和力矩的单位分别为mm,kg,(°)和N.m。铁皮筒试验体的竖向和三个转动方向刚度较大,因此在力一位移混合控制过程中,水平x,y向采用位移控制,竖向z向采用力控制,转动φx,φy,φz方向采用弯矩控制。在设计力一位移转换系数矩阵时,只对初始刚度矩阵的部分分块矩阵K=从而得到力一位移转换系数矩阵。
在试验调试过程中,对比采用全矩阵和对角元简化的结果发现,对该试验体采用对角元简化控制效果更好,可能是实验体初始刚度矩阵的识别拟合误差导致非对角元的刚度识别不准确,因为初始刚度矩阵是由摄动法测量得到的力一位移曲线线性拟合得到的;在刚度矩阵拟合的过程中发现,非对角元刚度采用线性拟合的拟合误差较大,线性拟合的精度有限,而对角元的刚度采用线性拟合的拟合误差相对较小,因而系数矩阵只采用了对角元:
采用柔性多白由度力一位移控制方法,对铁皮筒试验体进行循环往复试验,试验得到的多白由度命令、响应的时程曲线如图4所示。从图4可以看出,无论是对于水平方向位移命令还是对于其他白由度的力命令,稳态时各个白由度的响应都很好地跟踪了命令,可以实现轴压、剪切、弯曲和扭转的同步协调加载。值得说明的是:此时上位机发送给下位机的命令经过了5s的插值发送,所以作动器的响应更平缓。竖向力响应大概有命令的20%以内的波动,但在加载步末尾能保证对命令的跟踪。
试验体六个白由度的力一位移曲线的试验结果如图5所示。
各个白由度的力一位移曲线表明:试验体已经进入强非线性阶段,最后试验体破坏,整个试验过程都实现了稳定的控制效果。
该试验装置中铁皮由螺栓连接到上下连接板,而铁皮和连接板之间可能存在滑移,图中曲线出现不同的扰动可能是边界滑移引起的。
3 三自由度试验验证
3.1 试验装置
理论分析和数值仿真表明,轴压、弯曲和剪切加载T况下分别满足下列条件时,可以忽略加载梁白身变形的影响:(1)对试验体进行轴压加载试验时,试验体轴向受压,加载梁受弯受剪,加载梁变形可通过跨中受集中荷载的简支梁计算得到,加载梁抗弯刚度与试验体轴向刚度之比大于10;(2)对试验体顶端进行弯曲加载试验时,加载梁跨中受弯矩作用,加载梁的抗弯线刚度与试验体的抗弯线刚度之比大于100;(3)对试验体进行剪切加载试验时,加载梁轴向受拉/压,跨中受弯,而试验体受剪受弯,加载梁轴向刚度通常远远大于试验体的抗剪刚度,因此加载梁变形的控制因素还是其抗弯刚度,加载梁的抗弯线刚度与试验体的抗弯线刚度之比大于100。本文介绍的三白由度试验装置的加载梁满足上述条件,可忽略加载梁白身变形的影响[21]。
对于三白由度试验装置,本研究采取的是内环和外环都是力控制与位移控制组合的方式,下面介绍三白由度的力一位移转换系数的( CF)求解过程。
CF根据试验体的初始刚度矩阵KE、初始柔度矩阵f和每个白由度的控制模式來确定,KE和f采用摄动法通过预试验拟合得到:
本次试验在中国地震局工程力学研究所地震工程与工程振动实验室进行,多白由度控制系统是在美国Shorewestern公司生产的液压伺服加载系统的基础上开发的。本次实验采用SC6000控制器作为内环控制器对作动器进行控制,采用控制矩阵软件模块作为柔性多自由度力一位移控制方法的外环P控制器。笛卡尔坐标系的加载命令通过局域网从主机接收。外环控制策略为:水平位移控制,垂直和转动力控制;作动器的控制策略为:水平作动器力控制和两个垂直作动器位移控制。控制策略如图6所示。
图6中,x2是力臂的长度,为1m;d1,Q,M分别是加载点处的水平位移、竖向力和弯矩。加载点位于试验体顶部的中心。
在结构试验中,由于结构的轴向刚度很大且重力荷载比较常见,因此在轴向采用力控制施加轴向荷载的控制效果较好。因为水平方向相对较软,所以出于安全考虑应采用外环位移控制。垂直作动器的内环位移控制主要是为了保证试验体屈服甚至倒塌时的稳定性,为了防止试验过程中超静定系统的过约束,所以水平作动器采用力控制来释放水平约束。
试验系统包含了作动器、SC6000控制器、泵、上位机。外环控制在SC6000控制器上运行,命令生成器内置于上位机,而上位机与SC6000控制器之间通过局域网进行通信。
外环控制器采用数字P控制器,转换系数矩阵是力一位移转换系数矩阵( CF)和坐标转换雅可比矩阵(CyT)的乘积。力一位移转换系数矩阵是广义刚度矩阵的逆。
试验体方钢管柱采用Q235钢焊接而成。钢板的连接采用圆坡口焊,槽深为较薄钢板的80%,焊脚为6 mm,锥形边缘为一级焊缝。试验装置照片和立柱轮廓如图7所示。试验系统的控制点位于试验体顶端中心线,与水平作动器作用点在同一平行线。
3.2 试验结果
通过摄动法和线性拟合的方法,可以得到FMFDC转换系数矩阵(将外部命令转换为作动器命令),可通过力一位移坐标转换矩阵CF与坐标变换雅可比矩阵CyT相乘得到,如表1所示。位移响应由作动器中的LVDT测量。垂直力是两个垂直作动器的力响应之和,力矩是通过加载梁的长度(1 m)乘以两个垂直作动器力的差来计算的,因此坐标转换雅可比矩阵如表2所示。
外环控制器为P控制器,各自由度的增益kp为0.5。
进行了三自由度加载循环往复试验,试验体在水平方向的位移响应如图8(a)所示。可以观察到,在每个加载步骤,位移响应都很好地跟踪指令。试验体在转动方向的弯矩响应如图8(b)所示。很容易发现弯矩响应在加载步骤结束时都能较好地跟踪命令。试验体的竖向力响应如图8(c)所示。从图8(c)中可以观察到响应跟踪命令的能力较好,由于力的噪声相对较大,因此响应中存在小波动。gzslib202204041545在循环往复试验过程中,力一位移关系和弯矩一转动关系如图9所示。试验体处于线性阶段,如图9(b)和9(c)所示。从图9(a)可以看出,由于试验过程中试验体的拐点移动,水平白由度下的滞回曲线不同于传统钢试件的滞回曲线,可能是柱脚的滑移导致的。
4 结论
(1)本文针对结构或构件多自由度循环往复试验的各种可能情况,提出了一种可以根据试验体和试验装置特点灵活选择控制点自由度和作动器的力或位移控制方式的混合控制方法,即柔性多自由度力一位移混合控制(FMFDC)策略,相比较以往力一位移混合控制方法中的力一位移转换系数矩阵求取方法,提出了基于更一般的广义刚度矩阵的概念来设计的力一位移转换系数矩阵,这是对已有的力一位移混合控制方法的发展,并扩充了其应用范围。可以灵活地根据试验体和加载装置的特征在多自由度分别设计各种力一位移混合组合策略,提高多自由度协调加载的精度和稳定性。以平面三自由度和空间六自由度为例介绍多自由度力一位移混合控制软硬件平台的搭建,分别进行了小尺寸铁皮筒试验体和足尺钢柱的循环往复试验。
(2)基于六自由度运动平台系统搭建了柔性六自由度力一位移混合控制平台,进行了铁皮筒试验体空间六白由度循环往复试验,试验结果表明:在各个自由度存在较强耦合的情况下,各个自由度都实现了较好的跟踪控制,从试验体的滞回曲线上来看,试验体已经进入了非线性,试验结果表明柔性多自由度力一位移混合控制达到了理想的控制效果。
(3)基于Shorewestern液压伺服控制系统搭建了柔性三自由度力一位移混合控制平台,进行钢柱试验体三自由度循环往复试验,采用更为灵活的力一位移混合策略,在自由度和作动器层面分别进行力、位移混合控制,试验结果表明了控制精度满足要求,验证了柔性多自由度力一位移混合控制策略的可行性和灵活性。致谢
关于加载梁自身变形对试验体的影响,感谢陈永盛博士对刚度比提供的理论分析和数值仿真建议。
参考文献:
[1]张东彬,潘鹏,王萌资,等.开长孔式叠层钢管屈曲约束支撑试验研究[J].土木工程学报,2016,49(12): 9 15.
Zhang Dongbin, Pan Peng, Wang Mengzi, et al.Experimental study on performance of a bucklingrestrainedbrace consisting of three steel tubes with slotted holes inthe middle tube[Jl. China Civil Engineering Journal,2016,49(12):9-15.
[2]王贞,朱思宇,许国山,等.双向混合试验方法及验证[J].振动与冲击,2019,38(9):1-8.
Wang Zhen, Zhu Siyu, Xu Guoshan. et al.Bidirectional hybrid test method and its verification[J]. Journal ofVibration and Shock, 2019, 38(9):1-8.
[3]邱法维,杜文博,刘中田,等.结构在复杂加载路径下的拟静力实验方法及控制[J].土木工程学报,2003. 36(12):8-13,38.
Qiu Fawei, Du Wenbo. Liu Zhongtian, et al.Methodand control for static simulated test of structures undermultiple dimensional loading path[J].China Civil Engineering Journal, 2003, 36( 12): 8-13 .38.
[4] 黄靓,施楚贤,刘桂秋,等.MDOF子结构拟动力方法在复杂高层结构抗震试验中的应用研究[J].土木工程学报,2006. 39(12):2332.
Huang Liang, Shi Chuxian. Liu CJuiqiu, et al. MDOFsubstructure pseudodynamic testing for complex tall buildings[J].China Civil Engineering Journal. 2006, 39( 12):2332.
[5] 陳再现,姜洪斌,张家齐,等.预制钢筋混凝土剪力墙结构拟动力子结构试验研究[J].建筑结构学报,2011. 32(6):41-50.
Chen Zaixian, Jiang Hongbin, Zhang Jiaqi, et al. Pseudodynamic substructure test on precast reinforced con-crete shear wall structure[J].Journal of Building Struc-tures, 2011, 32(6):41-50.
[6] 郭玉荣,张国伟,肖岩,等.单自由度结构远程分析及拟动力试验平台[J].湖南大学学报(自然科学版),2006,33(2):1821.
(Juo Yurong, Zhang Guowei, Xiao Yan, et al.A platform for remote analysis and pseudo dynamic testing ofSDOF structures[J].Journal of Hunan University( Natural Sciences), 2006, 33(2): 1821.
[7] PAN P, NAKASHIMA M. TOMOFUJI H. Onlinetest using displacementforce mixed control[Jl. Earth-quake Engineering and Structural Dynamics. 2005. 34:869-888.gzslib202204041545[8]HOLUB C J.Interaction of variable axial load and sheareffects in RC bridges[D].Urbana-Champaign: University of Illinois at Urbana-Champaign, 2009.
[9] NAKATA N. SPENCER B F. ELNASHAI A S.Mixed load/displacement control strategy for hybridsimulation[C]. 4th International Conference on Earth-quake Engineering.Taipei, 2006: 94.
[10] MAHMOUD H N. ELNASHAI A S, SPENCER BF, et al. Hybrid simulation for earthquake response ofsemirigid partial-strength steel frames[Jl. Joumal ofStructural Engineering, 2013, 139(7):1134-1148.
[11] PAN P. ZHAO G. LU X Z,et al. Forcedisplacementmixed control for collapse tests of multistory buildingsusing quasi-static loading systems[J].Earthquake Engineering and Structural Dynamics. 2014. 43 (2) :287-300.
[12] WANG Z. TIAN Q Y, SHI P F. et al. Performancevalidation and application of a mixed forcedisplacementloading strategy for bidirectional hybrid simulation[J].Smart Structures and Systems, 2020, 26(3): 373390.
[13]曾聪,吳斌,许国山,等.结构多轴抗震试验加载系统的开发及其控制策略研究[J].振动与冲击,2014. 33(2):1 6.
Zeng Cong, Wu Bin, Xu Guoshan. et al. Multiaxialdynamic structural testmg system and its control strategies[J].Journal of Vibration and Shock. 2014, 33(2):1-6.
[14]曾聪,许国山,张树伟,等.力位移混合控制方法在大型多功能试验加载系统拟静力试验中的应用[J].振动与冲击,2016, 35(7):161-166.
Zeng Cong, Xu Guoshan. Zhang Shuwei, et al. Application of forcedisplacement hybrid control method inquasi-static tests of a multifunctional testing system[J].Journal of Vibration and Shock. 2016, 35(7):161-166.
[15]许国山,文龙,贾德登,等.多功能三自由度加载系统实验验证[C].第五届土木工程结构试验与检测技术暨结构实验教学会议.西安,2016.
[16] XU G S. WAN(J Z,WU B. et al.Seismic performance of precast shear wall with sleeves connectionbased on experimental and numerical studies[J]. Engineering Structures, 2017, 150: 346358.
[17] XU G S,WU B, JIA D D. et al. Quasi-static tests ofRC c01umns under variable axial fOrces and rotations[J].Engineering Structures,2018,162:60-71.
[18]周惠蒙,李梦宁,王涛.子结构试验的多自由度力位移混合控制方法研究[J].振动T程学报,2020,33 (1):168-178.
Zhou Huimeng,Li Mengning,Wang Tao.Force displacement miXed contr01 0f substructure test with multiple degrees of freedom[J].Journal of Vibran.n Engi neering,2020,33(1):168 178.
[19]CHIA M C,THOMAS M F,BILLIE F S,et al.Mul-tiple degrees of freedom positioning correction fOr hybrid simulation[J].Journal of Earthquake Engineering,2015,19:277- 296.
[20]邱法维,杨丽,沙锋强,等.Stewart平台力控制系统研发[J].液压与气动,2011(12):9-11.
Qiu Fawei,Yang Li,Sha Fengqiang,et al.Development of fOrce posture contr01 system fOr Stewart plat_ form[J].Chinese Hydraulic&Pneumatics,2011(12): 9-11.
[21]陈永盛.基于截面屈服面模型更新的框架结构混合试验方法[D].哈尔滨:哈尔滨工业大学,2015.
猜你喜欢
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
电脑知识与技术(2016年22期)2016-10-31
科技视界(2016年6期)2016-07-12
科技视界(2016年12期)2016-05-25
物联网技术(2015年12期)2015-12-28
现代电子技术(2015年22期)2015-12-02
现代电子技术(2015年15期)2015-08-14
物联网技术(2015年5期)2015-07-18