基于量子粒子群的斜坡上两轮移动机器人的广义二型模糊控制
2022-03-18 06:13梁进榜
计算机应用与软件 2022年3期
梁进榜 赵 涛
(四川大学 四川 成都 610065)
0 引 言
2WMR具有结构简单、体积小、能耗低和活动灵活的特点,可以原地180度旋转,在狭小的环境中能够完成其他轮式机器人无法完成的复杂运动。从而使得其在各个领域中被广泛运用在勘探和搜索中的移动平台中[1]。2WMR的两个车轮分别安装在其的两侧,并安装在同一轴线上。通过两个电机用差分的方式来独立驱动。2WMR的整体质心保持在车轮的轮轴上,从而通过小车的运动来维持平衡。2WMR具有典型的多变量、不稳定、欠驱动和非线性的特点,容易受到外部干扰的影响,是验证各种先进智能控制算法验证的平台[2-8]。虽然有大量的文献对2WMR进行了研究,但是现有研究很少考虑到2WMR在复杂的环境中的平衡和位置控制,也很少考虑外部干扰对2WMR的运动控制的影响。
针对非线性系统和处理系统干扰方面,模糊逻辑控制有着非常好的表现。Qin等[9]建立了非完整2WMR的动力学和运动学模型,并设计了基于T-S模糊模型的具有并行分布补偿器的模糊控制器。Wu等[10]运用牛顿动力学力学理论建立了2WMR的动力学方程,并设计了极点配置状态反馈控制器和模糊逻辑控制器,在有不确定干扰的条件下模糊控制器具有很好的表现。Sadeghian等[11]设计了Fuzzy-PID控制器来控制2WMR的平衡和位置,并且与传统PID和模糊PID比较了其控制效果,从而说明模糊PID具有更好的控制效果。
二型模糊集是一型模糊集的扩展,其对应的模糊集由两个一型模糊集分别作为上、下隶属函数围成的不确定迹(FOU)。因此相比于一型模糊集,二型模糊集有效提高了系统处理不确定性的能力[12]。广义二型模糊集是二型模糊集的扩展,其模糊集由不确定迹和次隶属函数围成的一个3D形状模糊集[13-14]。因此相比于区间二型模糊集,广义二型模糊集将更有效地提高系统处理不确定性的能力[15-17]。随着社会的发展,现代系统的复杂度越来越高,不确定性也随之变多,广义二型模糊集的优势得以体现。因此,采用广义二型模糊控制可以增强系统处理不确定性和抗干扰的能力。
在模糊控制中,隶属函数的选择至关重要,其选取的好坏直接体现在控制效果上。隶属函数参数的选取大多是凭专家经验选取或试错得到,这种传统的参数选取方法往往难以满足控制要求。此外,由于GT2FLC系统中的参数繁多,使得传统的参数选取方法更难选取合适的参数。
粒子群优化算法(PSO)和遗传算法(GA)都是使用广泛的仿生优化算法,都是在利用自然特性的基础上来模拟种群的适应性,并通过一定的方法、规则来寻求最优解[18-19]。尽管PSO与GA的效果基本相同,但PSO相较于GA更加高效[20]。QPSO是一种基于量子力学的全新粒子群优化算法[21],它引入了δ降势,取消了粒子的移动方向属性,粒子的位置和速度在量子空间中不能一起确定,因此用波函数表示粒子位置,通过蒙特卡罗方法求出粒子位置,通过平均最好的位置求解得到最终的最优位置。从量子力学的角度来看,处于量子束缚的粒子能够以一定的概率出现在任何的解空间[22-24],因此QPSO具有更好的收敛性,优于PSO。因此针对GT2FLC中规则参数设置问题,本文采用了QPSO优化隶属函数参数,并将优化后的GT2FLC用于两轮移动2WMR的平衡和位置控制。
本文主要贡献如下:① 针对2WMR,分别设计了基于优化思想的平衡控制和位置控制的GT2FLC;② 针对2WMR中GT2FLC的隶属函数参数难以确定,利用QPSO优化参数,提升系统的控制效果;③ 通过添加干扰,验证设计的控制器有效性,达到本文所需要的效果;④ 考虑了不同斜面情况,通过优化参数,验证优化效果的先进性。
1 两轮移动机器人动力学模型


图1 2WMR结构示意图
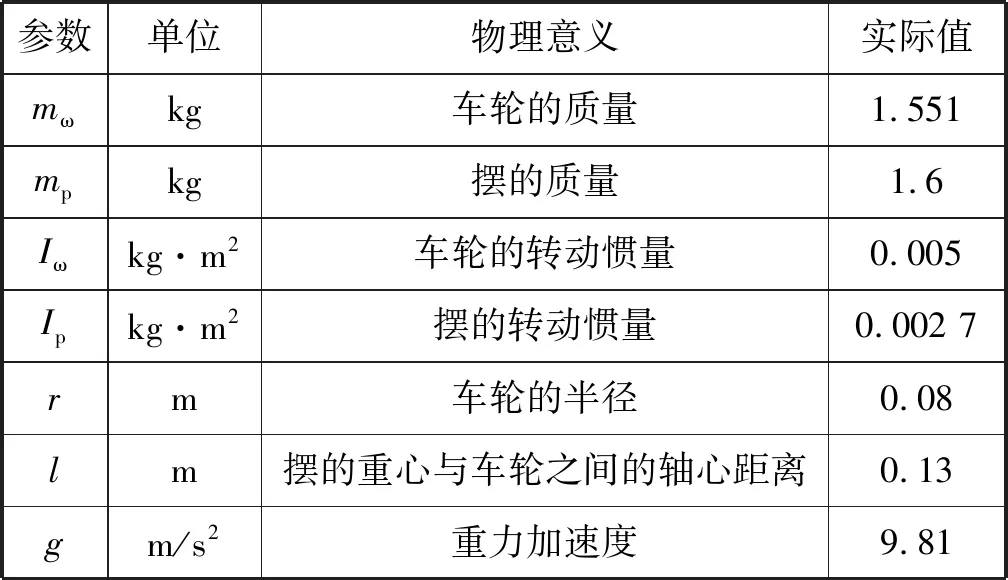
表1 2WMR系统参数
2WMR的非线性模型[25]可表示为:

(1)
其中:
(2)
(3)
(4)
(5)
本文主要研究了对2WMR的平衡控制和位置控制。对2WMR的平衡控制如图2所示。
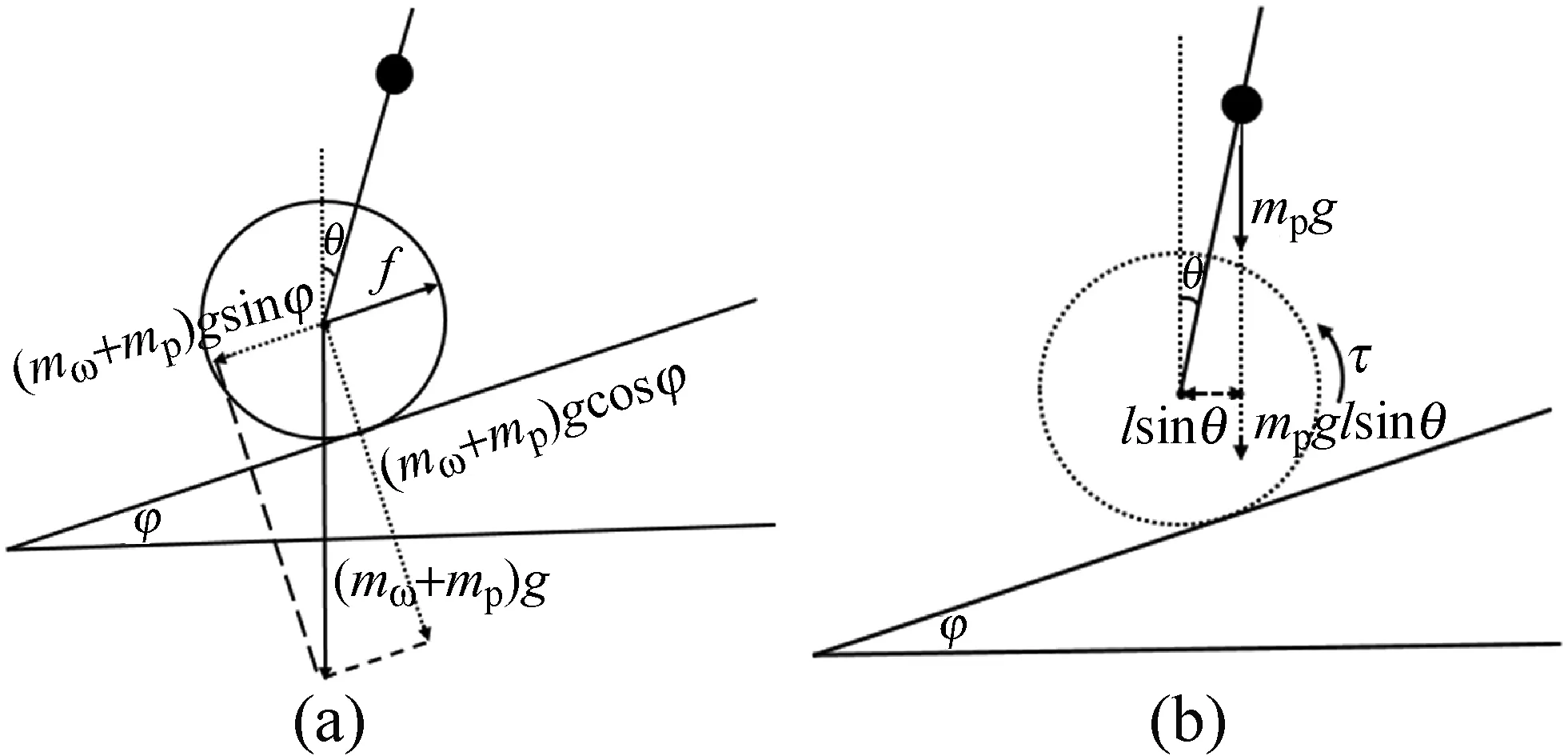
图2 2WMR的运动分析图
当移动2WMR在φ>0的倾斜角上处于平衡状态时,分别以车体和摆为对象分析平衡条件。图2(a)中:f为静态摩擦力,沿斜面向上为正方向,根据图2(a)可得:f-sinφ(mp+mω)g=0。根据图2(b)可得:-f+mplgsin(θ)=0。由以上两个等式可得2WMR平衡时的平衡角度为θ=arcsin(rsinφ(mp+mω)/(mpl))。位置控制时,当2WMR向前倾斜的时候,2WMR向前移动来维持平衡,此时倾角也在不断减小,直到2WMR到达平衡时候的角度。当2WMR向相反方向倾斜的时候,2WMR向后移动来维持平衡,此时倾角也在不断变大,直至2WMR到达平衡时候的角度。因此,位置控制可以通过给2WMR一定的倾角的补偿角来控制位置。
2 量子粒子群算法原理
QPSO是一种基于PSO的改进算法。它主要是结合量子物理的思想改进PSO中更新粒子位置的方法。QPSO重点考虑了各粒子的全局最优和局部位置最优的信息[26]。假设在一个N(需要优化的参数的个数)维的搜索空间中,有一组由M个粒子组成的种群。其中,用Xi(t)来表示在时间t时刻,第i个粒子的位置,即Xi(t)=(xi,1(t),xi,2(t),…,xi,N(t))。用Pi(t)来表示第i个粒子的最好的位置,即Pi(t)=(Pi,1(t),Pi,2(t),…,Pi,N(t))。用G(t)来表示种群的最好的位置,即Gbest(t)=(G1(t),G2(t),…,GN(t)),且Gbest(t)=Pbest_g(t),其中best_g∈{1,2,…,M},best_g为需要寻找的粒子的下标。
Pi(t)表示第i个粒子的最好位置,由式(6)计算得出:
(6)
Pbest_g则表示群体的全局最好位置,由下式确定:
(7)
QPSO用波函数来表示粒子的状态,δ势降中的特征长度用L表示。采用蒙特卡洛方法,可以得到粒子位置更新的公式为:
xi,j(t+1)=pi,j(t)±Li,j(t)/2·ln(1/uij(k))
(8)
pi,j(t)=φjPi,j(t)+(1-φj)Gj(t)
(9)
Li,j(t)=2α|Cj(t)-xi,j(t)|
(10)
式中:α为收缩扩张因子,α一般不大于1;uij(k)和φj是(0,1)上的均分布数值。
综上,QPSO中粒子更新方程为:
(11)
3 广义二型模糊控制器设计与优化
3.1 广义二型模糊集
(12)
(13)
二型模糊集是一个特殊的广义二型模糊集,可以由上、下隶属函数围成的一个区间定义。围成的区间也叫作不确定性迹,如图3所示。
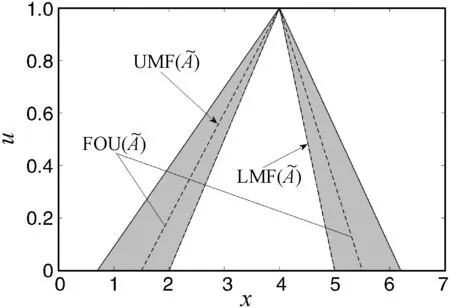
图3 广义二型模糊集
广义二型模糊集是区间二型模糊集的扩展,其隶属函数为3D的集合,如图4所示。

图4 广义二型模糊集
因为区间二型模糊得到了广泛的研究,因此可以将3D广义二型模糊集近似为多个区间二型模糊。广义二型模糊集的隶属函数被切成多个切片,每个切片组合起来就近似3D广义二型模糊集。广义二型模糊集常用的表达方式是垂直切片、水平切片和波浪切片[13]。本文主要使用水平切片表示,如图5所示。

图5 广义二型模糊集水平切片示意图
本文的广义二型模糊系统的次隶属函数为三角形,如图6所示。其形状由ω∈[0,1]决定,当ω=0或者ω=1时,其次隶属函数分别为右三角形或者左三角形,当ω=0.5时,其次隶属函数为等腰三角形。

图6 广义二型模糊集的次隶属函数
本文用α截集来表示每个切片模糊集[28]:
(14)
使用“数积”的概念及其运算的简便性,节约计算成本的考虑,一般将广义二型模糊集的切片α定义为α=[0;0.2;0.4;0.6;0.8;1]来近似广义二型模糊集。
3.2 广义二型模糊控制器设计

平衡控制模糊规则为:

位置控制模糊规则为:

其中:位置误差pe∈[-3,3];2WMR俯仰角的补角输出θoff∈[-π/40,π/40]。2WMR的整体控制原理图如图7所示。

图7 2WMR的整体控制原理图
本文设计的GT2FLC系统采用单值模糊化,主要用来优化GT2FLC的次隶属函数中的ω的值,以及当α=0时,主隶属函数的模糊集,此时可以看作为优化一个二型模糊集和次隶属函数的顶点。前件、后件划分成7个三角形的区间二型模糊集NB、NM、NS、ZO、PS、PM、PB),其分别表示负大、负、中、负小、零、正小、正中、正大7个模糊集。ω∈[0,1]为次隶属函数的顶点。模糊推理采用Mamdani型最小t范数,为了简化计算和节省优化时间,本文采用了NT降型解模糊方法[29-31],规则表如表2所示。

表2 平衡(位置)控制模糊规则
3.3 模糊规则参数优化
大多数情况下,隶属函数中各个参数的选取大多靠专家经验,这种选取方式往往很难有好的控制效果,而选取的隶属函数的好坏又会直接影响控制效果。因此,本文采用QPSO来优化隶属函数的参数,并和PSO作比较。
QPSO中,本文采用误差绝对值乘以时间后积分作为适应度函数,为了节约计算成本,本文将适应度函数改为离散的形式。其中平衡控制器的参数优化时,适应度函数的选择为:
(15)
位置控制器的参数优化时,适应度函数的选择为:
(16)
式中:|theta(i)|表示为i时刻俯仰角的误差;|distance(i)|表示为i时刻位置误差;η为步长。QPSO的流程图如图8所示。

图8 QPSO优化流程图
4 仿真结果与讨论
本节仿真的结果是基于MATLAB平台仿真实现的。本文采用PSO、QPSO两种优化算法分别对平衡控制器的隶属函数和位置控制器的隶属函数进行优化并且进行比较。此外,本文将考虑在不同的斜坡上,在三种不同条件下的优化控制算法的效果,最后再考虑扰动存在的情况下,比较不同斜坡情况下,广义二型模糊和区间二型模糊的控制效果。
4.1 平衡控制
(1) 当2WMR在2.45°的斜面上运动,不存在扰动时,分别采用两种优化算法后的参数控制平衡。2WMR的初始状态为x=[0;0;0.3;0]。图9为QPSO优化之后前件的隶属函数,次隶属函数顶点ω=0.262,优化后的后件集如表3所示。
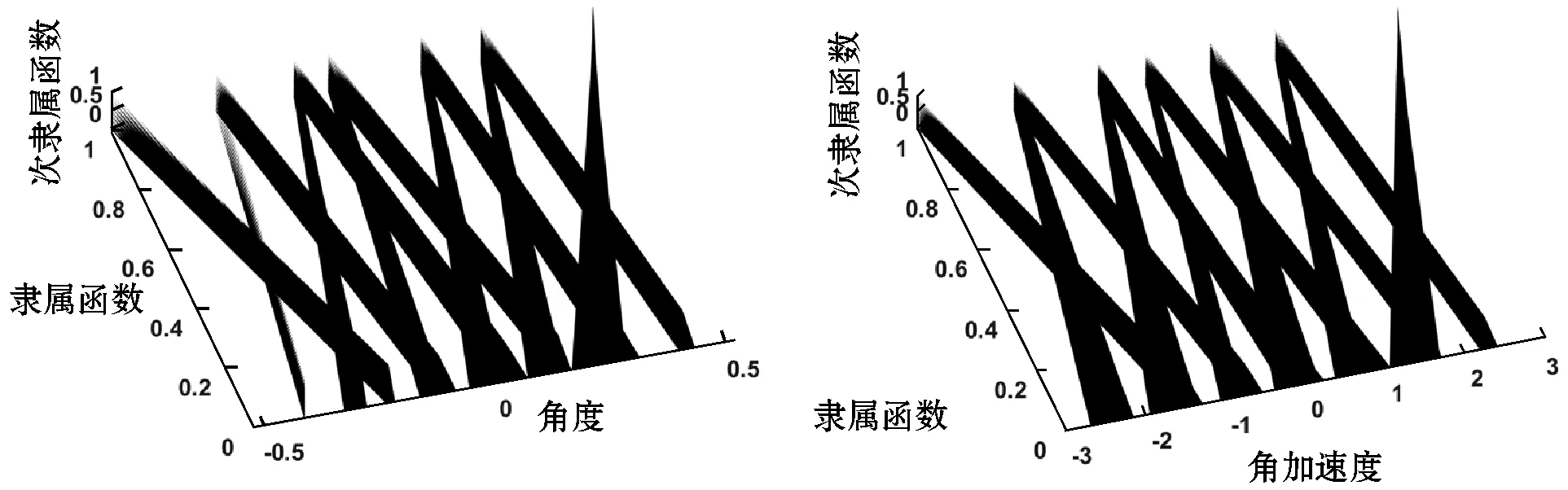
图9 QPSO优化后前件的隶属函数

表3 优化后后件集参数
图10所示为倾斜角为4.3°时,GT2FLC仅控制平衡时的效果。图11所示为平衡控制时的适应度函数图,此时,由2WMR平衡时的平衡角度公式和控制率计算公式可以得到,当倾斜角为2.45°时,2WMR平衡时的角度θ=0.05 rad,控制率为0.1 N·m。
图10 倾斜角为2.45°时平衡控制的效果
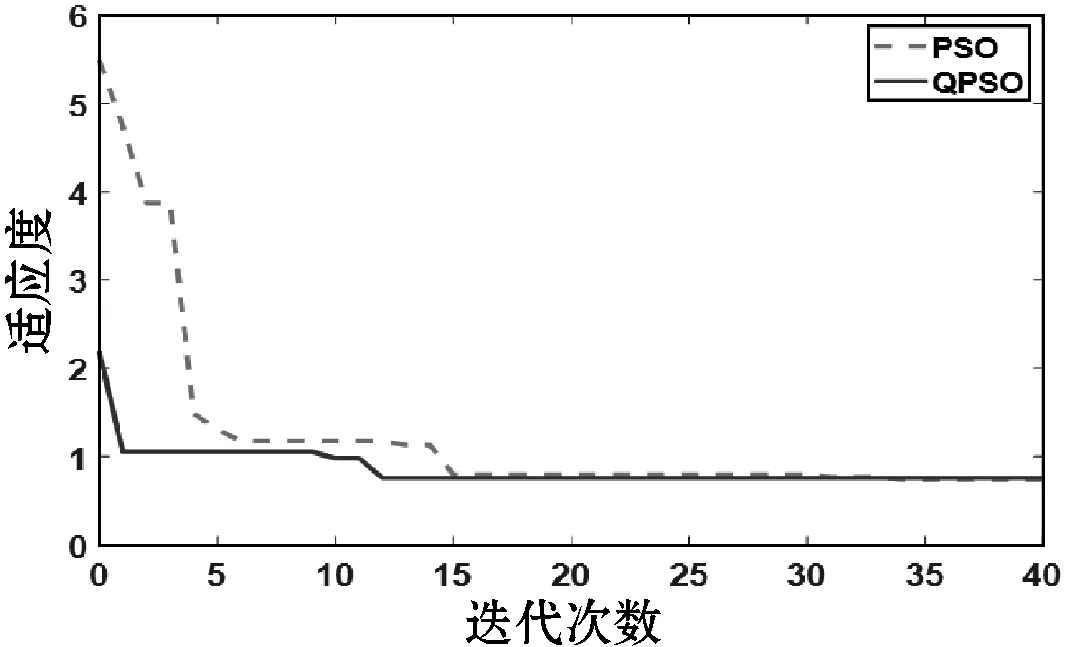
图11 倾斜角为2.45°时平衡控制的适应度函数
(2) 当2WMR在4.3°的斜面上运动,不存在扰动时,分别采用两种优化算法后的参数控制平衡。2WMR的初始状态x=[0;0;0.3;0]。图12所示QPSO优化之后前件的隶属函数,次隶属函数顶点ω=0.025,优化后的后件集如表4所示。
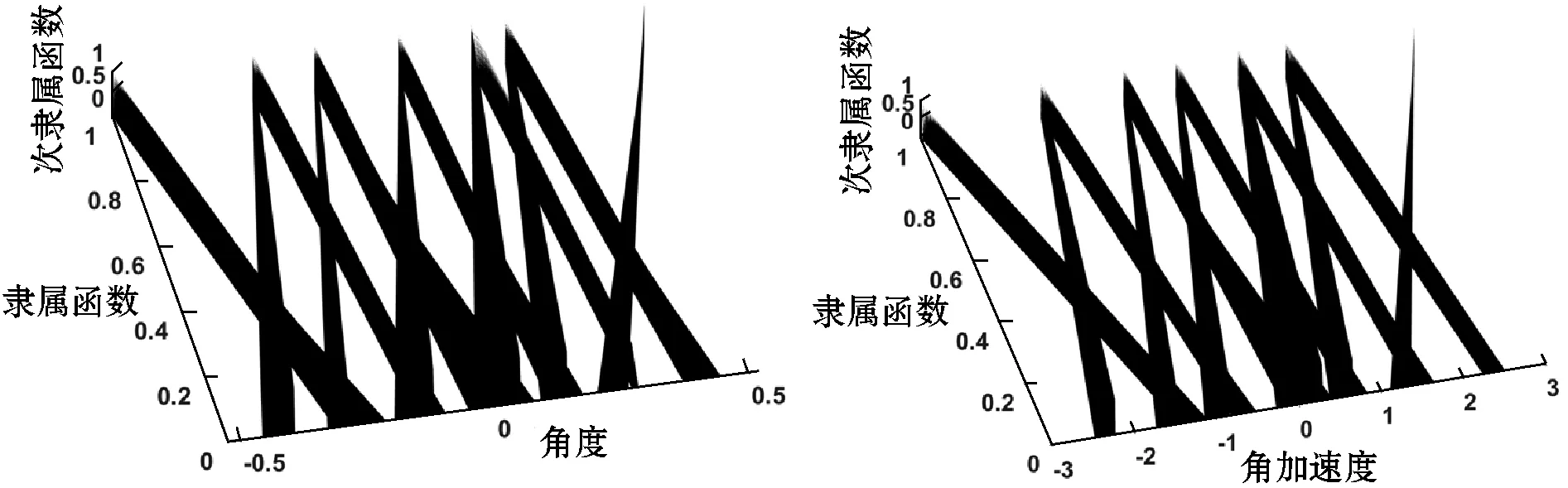
图12 QPSO优化后前件的隶属函数
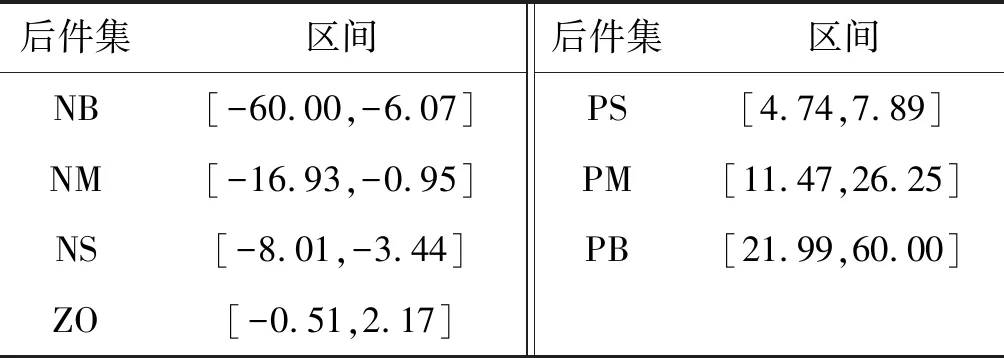
表4 优化后后件集参数
图13所示倾斜角为4.3°时,GT2FLC仅控制平衡时的效果。图14所示平衡控制时的适应度函数图。同理,倾斜角为4.3°时,2WMR平衡时的角度θ=0.09 rad,控制率为0.185 5 N·m。

图13 倾斜角为4.3°时平衡控制的效果

图14 倾斜角为15°时平衡控制的适应度函数
(3) 当2WMR在15°的斜面上运动,不存在扰动时,分别采用两种优化算法后的参数控制平衡。2WMR的初始状态x=[0;0;0.3;0]。图15所示QPSO优化之后前件的隶属函数,次隶属函数顶点为ω=0.148,优化后的后件集如表5所示。
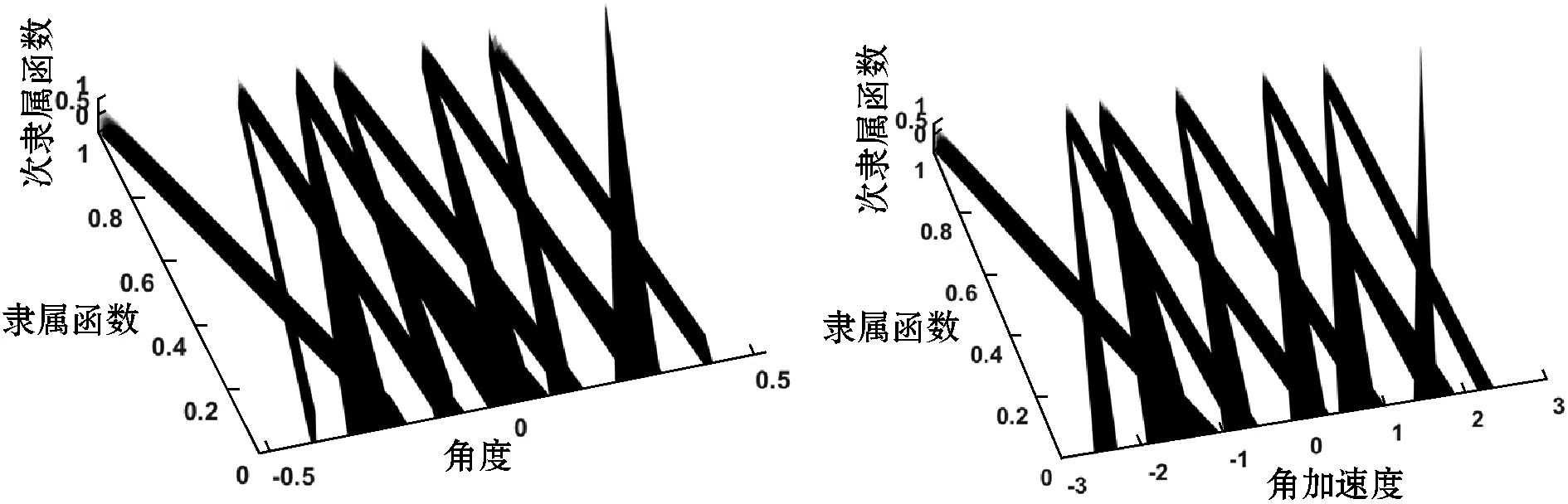
图15 QPSO优化后前件的隶属函数

表5 优化后后件集参数
图16所示倾斜角为15°时,GT2FLC仅控制平衡时的效果。图17所示平衡控制时的适应度函数图。同理,倾斜角为15°时,2WMR平衡时的角度θ=0.31 rad,控制率为0.64 N·m。

图16 倾斜角为15°时平衡控制的效果
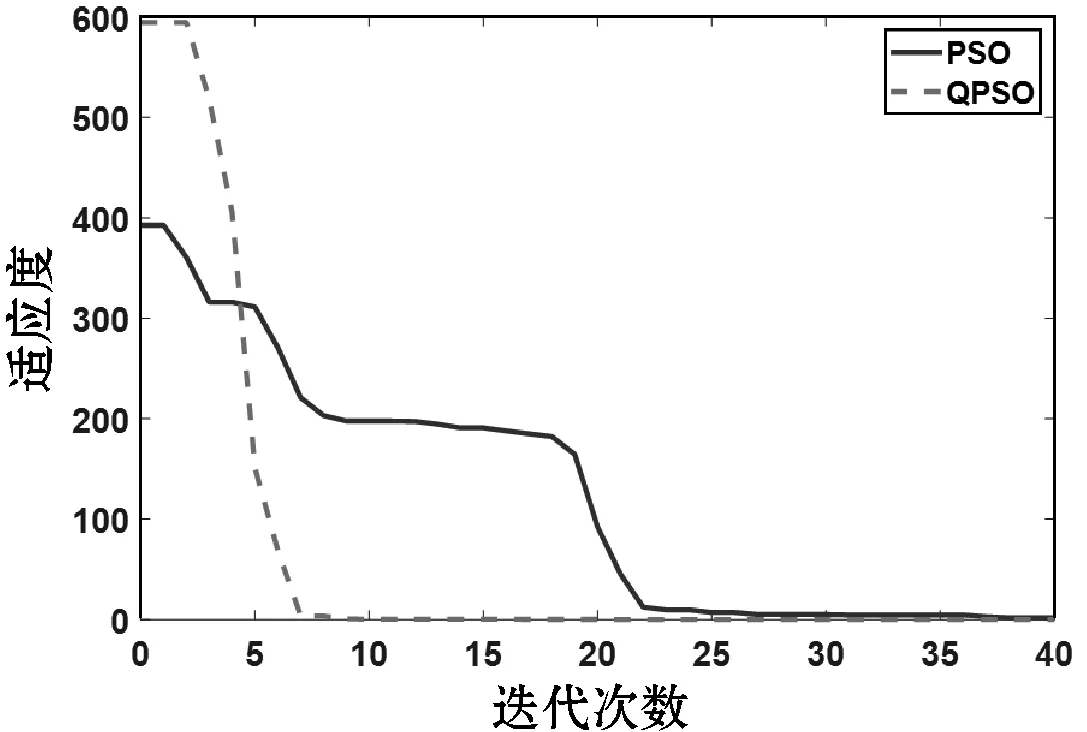
图17 倾斜角为15°时平衡控制的适应度函数
由图9-图17可以看出,当采用QPSO优化后的参数控制2WMR时,2WMR最快到达平衡,PSO次之,无优化的控制效果最差,而且平衡时都到达了期望的角度。在三种不同斜面倾角下,平衡所需要的控制率和计算的基本一致。相比与PSO,QPSO的适应度函数更早收敛,也说明采用QPSO优化可以得到更好的效果。
4.2 位置控制
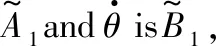
(1) 当2WMR在2.45°的斜面上运动,不存在扰动时,分别采用两种优化算法后的参数控制平衡。2WMR的初始状态x=[1.5;0;0.3;0]。QPSO优化后,次隶属函数的顶点ω=0.189,优化后前件和后件的隶属函数如图18所示。

图18 倾斜角为2.45°时优化后前后件的隶属函数
图19所示为斜面倾斜角为2.45°时,GT2FLC位置控制时的仿真效果及适应度函数图。

图19 倾斜角为2.45°时位置控制的效果
(2) 当2WMR在4.3°的斜面上运动,不存在扰动时,分别采用两种优化算法后的参数控制平衡。2WMR的初始状态x=[1.5;0;0.3;0]。QPSO优化后,次隶属函数的顶点ω=0.243,优化后前件和后件的隶属函数如图20所示。
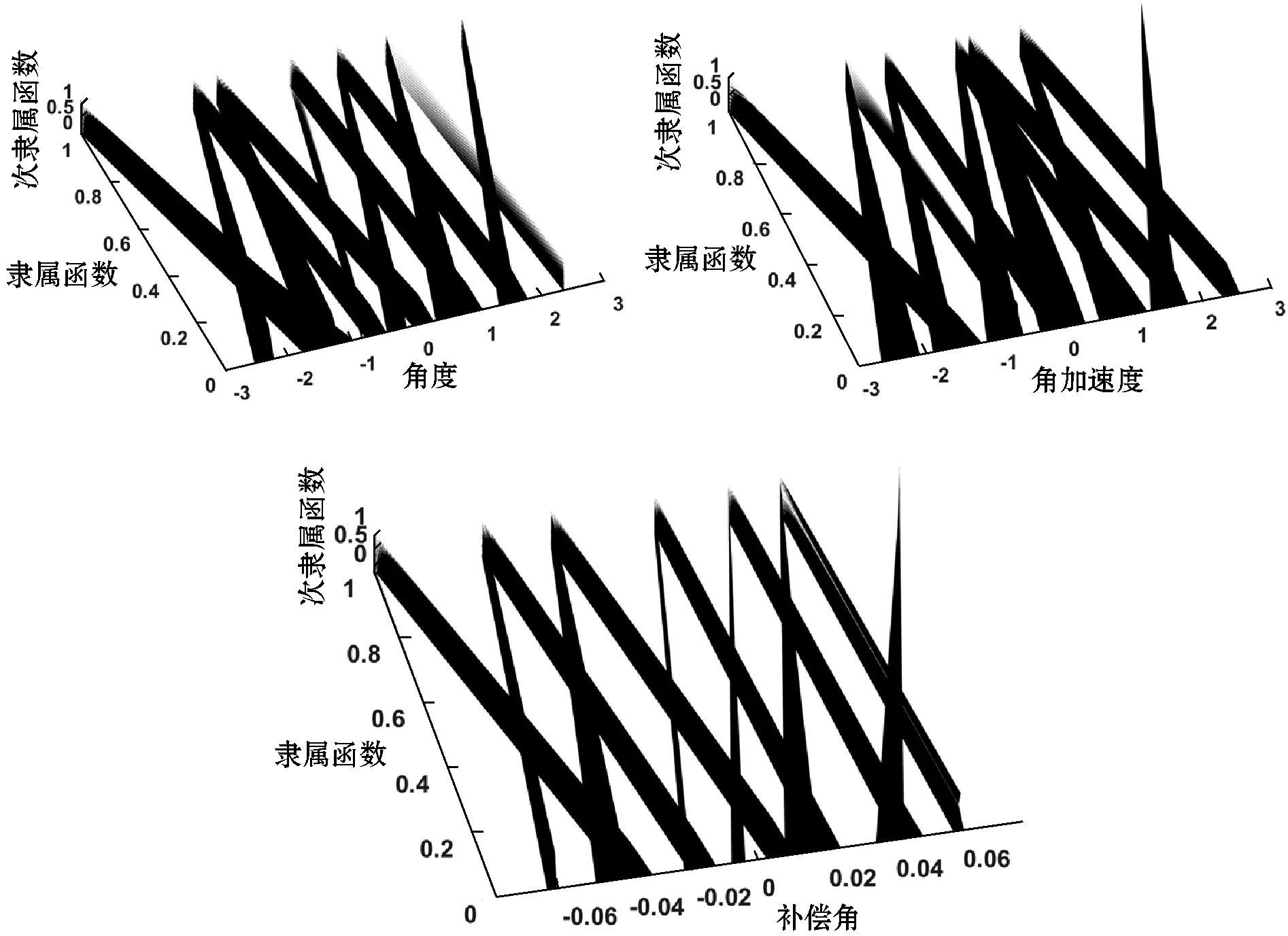
图20 倾斜角为4.3°时优化后前后件的隶属函数
图21所示斜面倾斜角为2.45°时,GT2FLC位置控制时候的仿真效果及适应度函数图。

图21 倾斜角为4.3°时位置控制的效果
(3) 当2WMR在15°的斜面上运动,不存在扰动时,分别采用两种优化算法后的参数控制平衡。2WMR的初始状态x=[1.5;0;0.3;0]。优化后,次隶属函数的顶点ω=0.673,QPSO优化后前件和后件的隶属函数如图22所示。

图22 倾斜角为15°时优化后前后件的隶属函数
图23所示斜面倾斜角为15°时,GT2FLC位置控制时候的仿真效果及适应度函数图。

图23 倾斜角为15°时位置控制的效果
实验结果表明,三种不同的斜面下,采用QPSO优化后的参数控制2WMR的位置时效果最好,PSO次之,没有优化的效果最差。同时,采用QPSO和PSO优化时,QPSO的适应度函数比PSO的适应度函数收敛得早,也说明采用QPSO优化后的效果最好。
4.3 存在干扰时的控制
2WMR的位置控制是通过平衡控制后再来控制2WMR的位置,所有考虑在位置控制中分别加上角度干扰和位置干扰,比较IT2FLC和GT2FLC的控制效果。
1) 角度干扰。
(1) 当2WMR在2.45°的斜面上运动,并且在t=6 s时,加0.2·randn的角度干扰,分别采用IT2FLC和GT2FLC控制2WMR的位置,结果如图24所示。
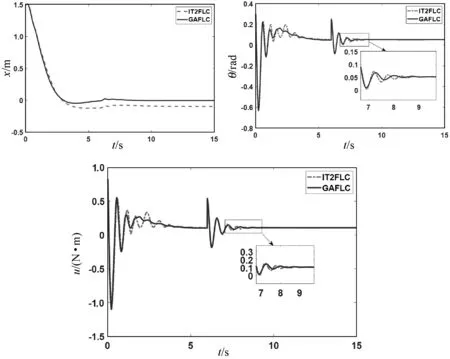
图24 倾斜角为2.45°存在角度扰动控制效果
(2) 当2WMR在4.3°的斜面上运动,并且t=6 s时,加0.2·randn的角度干扰,分别采用IT2FLC和GT2FLC控制2WMR的位置,结果如图25所示。

图25 倾斜角为4.3°存在角度扰动控制效果
(3) 当2WMR在15°的斜面上运动,并且在t=6 s时,加0.2·randn的角度干扰,分别采用IT2FLC和GT2FLC控制2WMR的位置。结果如图26所示。

图26 倾斜角为15°存在角度扰动控制效果
实验结果表明,当存在0.2·randn的角度干扰时,GT2FLC先达到平衡,以及期望的位置,并且平衡时的角度和平衡所需要的控制率与计算值基本相同。结果也表明GT2FLC具有更好的抗干扰能力。
2) 位置干扰。
(1) 当2WMR在2.45°的斜面上运动,并且在t=6 s时,加0.4 m的位置干扰,分别采用IT2FLC和GT2FLC控制2WMR的位置,结果如图27所示。
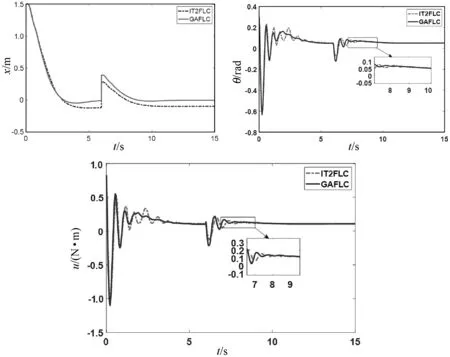
图27 倾斜角为2.45°存在位置扰动控制效果
(2) 当2WMR在4.3°的斜面上运动,并且在t=6 s时,加0.4 m的位置干扰,分别采用IT2FLC和GT2FLC控制2WMR的位置,结果如图28所示。
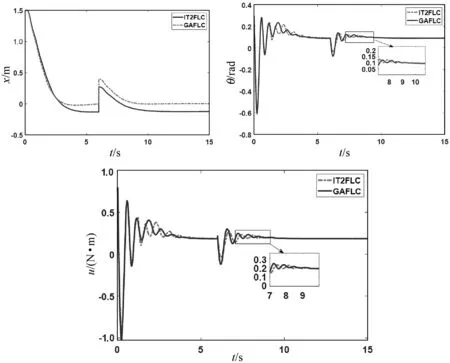
图28 倾斜角为4.3°存在位置扰动控制效果
(3) 当2WMR在15°的斜面上运动,并且在t=6 s时,加0.4 m的位置干扰,分别采用IT2FLC和GT2FLC控制2WMR的位置,结果如图29所示。
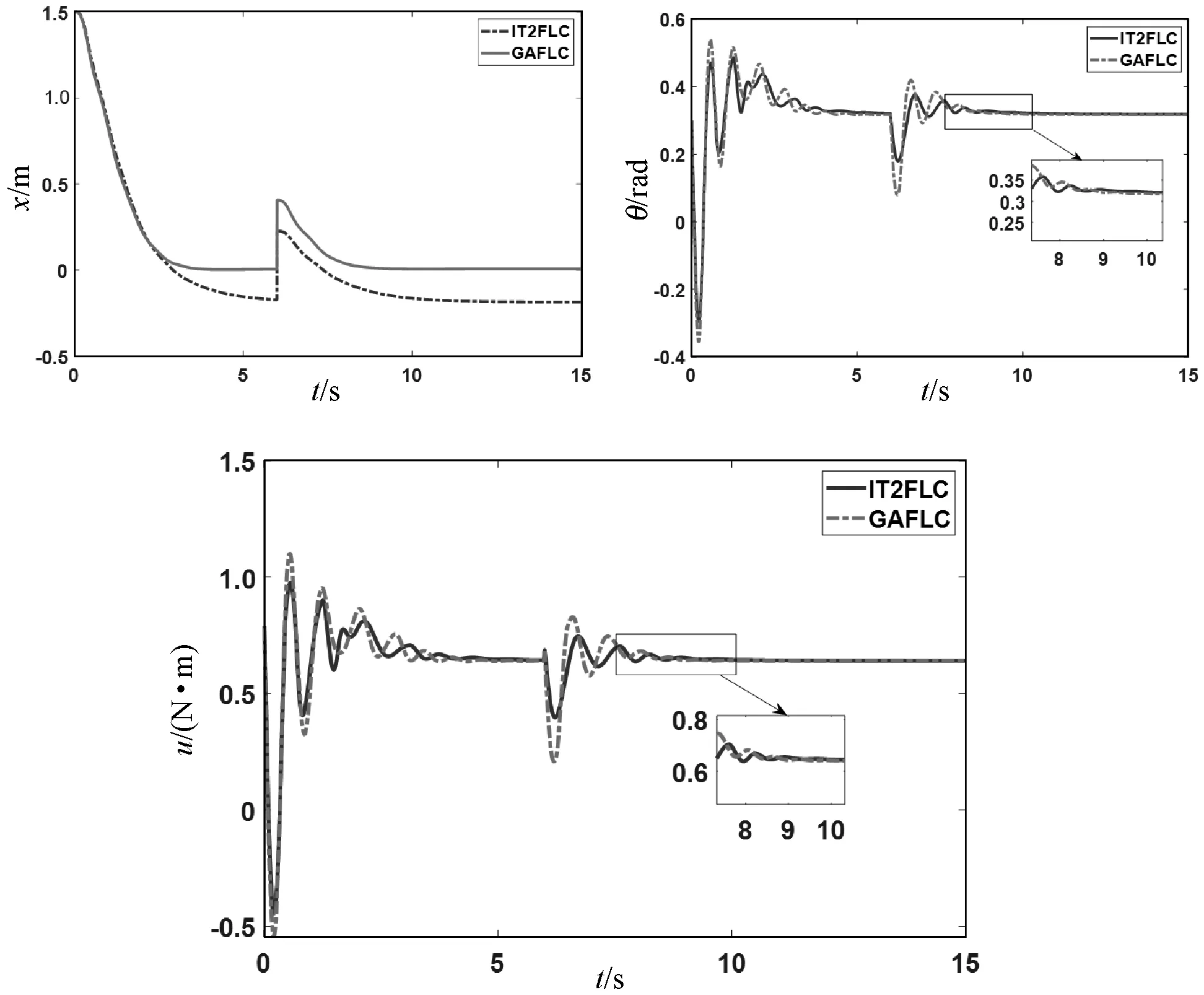
图29 倾斜角为15°存在位置扰动控制效果
实验结果表明,当存在0.4的位置干扰时,采用GT2FLC时能控制2WMR到达指定的位置,但是采用IT2FLC时无法到达指定的位置,进一步说明了GT2FLC具有更好的抗干扰能力。
5 结 语
本文针对2WMR分别设计了广义二型模糊逻辑平衡控制器和位置控制器。针对模糊系统中隶属函数参数的难以获得的问题,使用QPSO来优化参数。仿真结果表明,QPSO比PSO具有更好的优化效果。同时,比较了IT2FLC与GT2FLC的控制效果,并考虑到外界存在扰动时对控制效果的影响。实验结果表明,GT2FLC相比IT2FLC具有更好的控制效果和抗干扰的能力。未来工作将考虑2WMR在更加复杂多变的环境下的运动,并且能搭建硬件平台,验证相应算法的有效性。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
汉语世界(The World of Chinese)(2021年1期)2021-02-22
数学学习与研究(2018年12期)2018-08-17
上海师范大学学报·自然科学版(2018年3期)2018-05-14
中学课程辅导·教师教育(中)(2017年6期)2017-07-01
当代旅游(2016年10期)2017-04-17
财经理论与实践(2015年2期)2015-04-16
中学理科·综合版(2008年9期)2008-10-15
中学生数理化·高二版(2008年10期)2008-06-17