星基ADS-B监视性能评估软件设计与实现
2022-03-18 05:01:06王凤鑫刘海涛李保国
计算机应用与软件 2022年3期
王凤鑫 刘海涛 李保国 孙 沂
1(中国民航大学电子信息与自动化学院 天津 300300)2(中星中航通用航空产业投资有限公司 云南 昆明 650211)3(民航安徽空管分局 安徽 合肥 230041)
0 引 言
星基广播式自动相关监视系统(星基ADS-B)是实现广域范围内航空器监视的主要技术手段[1]。2014年MH370航班失联事件后,为解决传统陆基监视系统无法实现陆地偏远地区、海洋及南北两极航空器监视覆盖的问题,国际民航组织(ICAO)提出了星基监视的概念,将ADS-B接收机部署于低轨道卫星中,并利用多颗低轨道卫星形成覆盖全球的星基ADS-B系统。与传统的陆基监视系统相比,星基ADS-B系统具有覆盖范围广、不受地理环境限制、可满足航空器持续监视等多方面优势[1,7]。
2008年德国航空航天中心提出了星基ADS-B的概念,并于2013年5月发射了首颗搭载ADS-B接收机的PROBA-V实验卫星,验证了星基ADS-B技术的可行性[2];2013年11月丹麦GomSpace公司发射GomX-1实验卫星,用于低轨卫星ADS-B信号的接收实验[3];2015年9月,国防科技大学发射了“天拓三号”实验卫星,基于该实验卫星开展星基ADS-B信号接收方面的研究[3];2018年美国Aireon公司Iridium-NEXT 66颗在轨卫星部署完成[4],并于2019年4月在北大西洋上空全面投入运行,提供星基ADS-B数据服务。
为解决星基ADS-B系统监视性能指标评测问题,参考EUROCONTROL相关技术规范[8],设计实现星基ADS-B监视性能评估软件。首先阐明了监视性能评估技术指标及评估方法,随后介绍了星基ADS-B监视性能评估软件的总体架构、数据接入与处理模块、航迹显示模块及监视性能评估模块的设计思路,最后利用“天拓三号”实验卫星数据,对星基ADS-B系统监视性能评估软件进行测试。
1 相关研究
目前国内外航空监视系统性能评估软件分为两类,一类针对空管自动化系统监视性能进行评估,如EUROCONTROL的SASS-C,通过导入多源监视数据并对数据进行重构得到参考数据,再将评估数据与参考数据比较判断其是否符合EUROCONTROL当前监视性能标准,适用范围较广,局限性在于需要多种监视数据作为参考数据源,且授权、维护费用较高[5];第二类是以雷达系统评估为主的专用评估工具,如Intersoft-Electronics公司开发的RASS系列工具和FAA开发的RBAT,能够对雷达系统进行深入的分析,但不适用于星基ADS-B系统[6]。
在星基ADS-B系统监视性能评估方面,尚无明确的国际标准。文献[2]提出了目标检测概率、目标识别概率等性能参数的评估方法,对PROBA-V卫星载荷于北大西洋、太平洋等越洋航线上的监视性能进行评估;文献[4]给出载荷覆盖范围、可用性、传输延迟、更新间隔等性能参数评估方法,对铱星系统相关性能进行评估;文献[7]通过将“天拓三号”实验卫星下传位置数据与航路中心线比较,证明了星基ADS-B航迹数据误差符合正态分布。
2 监视性能评估方法
参照空管自动化系统监视数据接入最低标准[8],同时结合国内星基ADS-B实验系统的条件[3,9],从水平位置、气压高度、航迹速度三方面,给出星基ADS-B系统更新概率、更新间隔、目标丢失概率、航迹误差的统计方法。
2.1 测量间隔
测量间隔(Measurement interval,MI)用于评估监视系统数据项更新概率,而非监视性能评估参数[8]。根据星基ADS-B系统主要应用于洋区、极地、偏远地区的特点,执行最低水平间隔5海里评估标准,设置MI为8 s[11]。
2.2 水平位置/气压高度更新概率
水平位置/气压高度更新概率(Probability of update,PU)定义为监视系统在每一个规定的测量间隔内提供目标水平位置/气压高度有效数据的概率[8],以水平位置为例,其统计方法如下:
1) 以水平位置起始点为首个测量间隔中心,按规定测量间隔对航迹进行时间分割,分割方法如图1所示。

图1 水平位置更新概率示意图
2) 计算当前航迹测量间隔的总数量NT。
3) 计算测量间隔中存在有效水平位置数据项的测量间隔数量NR。其中有效数据判断标准为:(1) 数据项具备正确的目标身份标识;(2) 数据项具备正确的时间信息;(3) 在水平间隔为5海里空域时,水平位置误差小于2 100 m;(4) 在垂直间隔最低标准2 000英尺空域时,气压高度误差小于300英尺。
4) 按式(1)计算单航迹水平位置更新概率PU:
(1)
5) 计算监视系统覆盖范围内整体水平位置更新概率PUA,如式(2)所示,其中N为监视系统覆盖范围内的航迹总数。
2.3 目标丢失概率
目标丢失概率定义为监视系统连续丢失目标位置消息的概率[8]。如图2所示,当两个连续的完整目标报告时间间隔大于26.4 s(MI×3×110%)时,目标处于丢失状态。

图2 目标丢失示概率示意图
对于星基ADS-B系统,完整的目标报告应具备有效水平位置和气压高度。目标丢失概率RG计算方法如下:
首先,计算监视系统覆盖范围内航迹的测量间隔总和NA,如式(3)所示:
(3)
然后,计算目标丢失概率RG,如式(4)所示:
(4)
式中:NG为每次目标丢失所占的测量间隔数量;g为目标丢失发生的频数。
2.4 水平位置误差均方根
水平位置误差(Horizontal position error)定义为目标水平位置测量值与相应的水平位置参考值间的二维欧氏距离[8],式(5)为水平位置误差均方根(Root-Mean-Square,RMS)的计算公式:
(5)
式中:n为水平位置总数;E为水平位置误差。速度矢量、气压高度误差均方根的统计方法与水平位置相同。
2.5 更新间隔
更新间隔(Update Interval,UI)定义为监视系统连续两次正确接收目标位置消息的时间间隔[9]。更新间隔统计方法如下:
计算相邻两条ADS-B位置消息的更新间隔TUI,如式(6)所示:
TUI=ti-ti-1
(6)
式中:ti为该目标第i条位置消息的正确接收时刻;ti-1为该目标第i-1条位置消息的正确接收时刻。
根据EUROCAE相关技术规范,在低密度航线上(Low-Density En-Route),空中交通管制系统要求位置消息的更新间隔以96%概率小于8 s[13],按式(7)计算96%的位置消息更新间隔T96%:
P(TUI≤T96%)=96%
(7)
3 软件框架设计
星基ADS-B监视性能评估软件是集数据接收、解析、处理、存储、显示、监视性能指标评估于一体的自动化信息处理系统。软件基于面向对象方法设计,采用Visual Studio 2017开发平台,基于MFC建立人机交互界面,其总体框架设计如图3所示。

图3 星基ADS-B监视性能评估软件总体架构
软件由数据接入处理模块,监视性能评估模块及航迹显示模块组成。数据接入及处理模块用于完成星基ADS-B数据的接入、解析、数据融合及存储工作。航迹显示模块用于实现星基ADS-B监视性能评估软件地理信息绘制及航迹显示功能。监视性能评估模块完成空中位置、速度矢量更新概率、更新间隔、误差均方根、目标丢失概率等监视性能指标统计分析及显示功能。
4 功能模块设计
4.1 数据接入与处理模块
数据接入与处理模块由数据接收、消息解析、数据更新、数据存储四个单元构成。
数据接收单元负责接入卫星向地面传送的原始ADS-B消息,接入方式为消息记录文件导入或ADS-B地面接收机TCP通信传输。采用多个独立接入线程共享内容缓冲区的方式来实现数据共享与传输,保证了星基ADS-B数据的实时接入及处理。
消息解析单元对接入的每条ADS-B消息进行解析。星基ADS-B系统采用DF-17数据编码标准,对航班某一时刻速度、位置、航班号等状态信息单独编码为112 bit的数据帧进行下传[12]。该单元首先记录消息接收时间,然后进行CRC校验、并按照RTCA DO260-B标准[12]进行消息解析。
数据融合单元将解析结果融合为航班飞行状态,解决方法为创建包括消息接收时间、ICAO地址码、消息类型、航班号、空中位置、速度、航向、导航完整类别在内的数据缓冲区,消息解析完毕后根据ICAO地址码查找该航班上一时刻飞行状态,替换相应数据,实现数据融合。
数据存储单元将数据处理结果存入数据库,数据库采用Microsoft SQL Sever以满足大量数据管理的需求,采用ADO(ActiveX Data Objects)对象实现对数据库的访问,通过调用自定义存储过程完成数据表的创建、删除等数据整理工作。
4.2 地理信息及航迹显示模块
地理信息及航迹显示模块用于实现软件背景地图和目标航迹的显示,显示内容包括行政区域、河流、航路、铁路、危险区、近进区等。软件启动时预先加载Shapefile文件作为地理信息数据来源,采用MFC的CDC类实现图形绘制功能,基于消息映射机制实现地图拖动、缩放等功能。
实现地理信息及航迹的绘制需要将绘制点的大地坐标转换为屏幕显示坐标,解决方法为首先采用墨卡托投影完成大地坐标与平面坐标的转换,再将投影直角坐标系按照地图比例尺转换为屏幕坐标系即可得到屏幕显示坐标[14-15]。
4.3 监视性能评估模块
监视性能评估为软件的核心功能,该模块首先通过读取数据库信息得到航班相关飞行状态记录,随后采用卡尔曼滤波对原始航迹数据进行处理,得到参考航迹,以此完成监视性能的评估工作,最后以直方图和统计数据的方式显示统计结果。
监视性能评估流程如图4所示,选择需要评估的航班,根据ICAO地址在数据库中检索该航班当天所有航行状态记录,筛选出空中位置消息和速度消息,根据速度消息对航行状态进行分类,判断依据为:(1) 当纵向速度大于等于每分钟200英尺且小于等于每分钟8 000英尺时,航班处于爬升/下降状态;(2) 当横向加速度大于等于1.5 m/s2时,航班处于转弯状态。式(8)给出了横向加速度为1.5 m/s2时角速度W(单位:°/s)与速度V(单位:节)的关系[8]:

图4 监视性能评估流程
W=1.67/V
(8)
为评估星基ADS-B系统航迹误差,需要得到参考航迹,软件基于卡尔曼滤波算法,根据前一时刻目标状态估计值和当前时刻测量值对当前时刻状态进行最优估计,得到参考航迹[16],以水平位置为例,计算流程如图5所示。

图5 参考位置点建立流程
由于卡尔曼滤波适用于线性、离散系统,星基ADS-B系统输出的水平位置所在坐标系为WGS84坐标系,速度矢量信息所在坐标系为平面直角坐标系,需要对位置信息进行坐标转换。采用大地主题解算的方法,以首个空中位置点为平面直角坐标原点,根据前两点大地坐标求出前两点大地线长及方位角,推算第二个空中位置点平面直角坐标,以此类推完成坐标转换,且误差检核结果在10-16~10-12之间,可以有效避免坐标系转换带来的误差[17]。
4.4 图形界面设计
为更加直观地显示监视性能评估结果,设计了支持人机交互的可视化图形界面,如图6-图9所示,分别展示了软件界面、航行情报显示界面、航迹显示界面和评估结果可视化界面。

图6 星基ADS-B监视性能评估软件界面
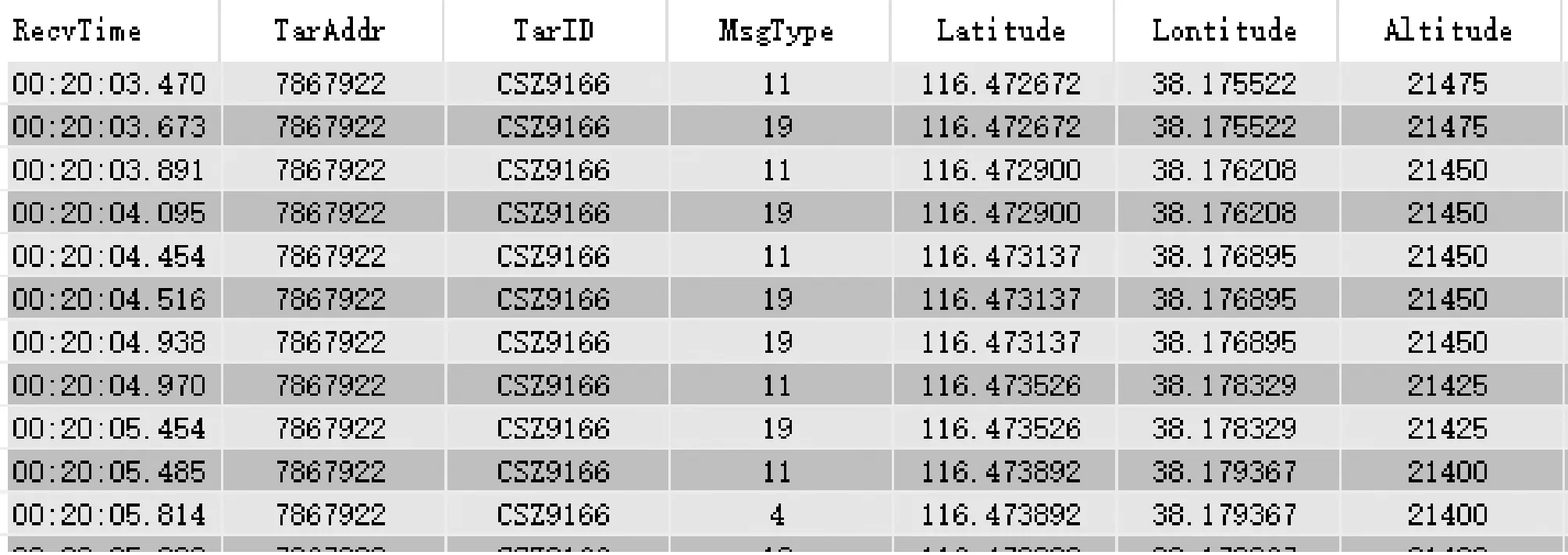
图7 航行情报显示

图8 航迹显示界面

图9 评估结果可视化界面
图7显示为航行情报信息表格,每一行容纳一架航班消息统计信息并实时刷新,ICAO地址、接收消息数量、航班号、监视起始时间、监视结束时间按列分别显示。图8显示为地理信息、航班原始航迹、参考航迹。图9以直方图和统计数据的方式显示监视性能评估结果,其中直方图的横轴为监视性能参数范围,纵轴为在此范围内的消息数量。
5 应用验证
采用国防科技大学“天拓三号”卫星数据开展星基ADS-B系统监视性能评估工作。对卫星下传数据进行解析,效果如图10所示。

图10 “天拓三号”卫星下传数据显示
为分析星基ADS-B系统对越洋航班的监视能力,选取卫星接收机2016年10月23日下传数据中途经大西洋的7架航班航行情报进行统计分析,统计结果如表1所示。

表1 “天拓三号”实验数据评估结果
可以看出,在单载荷覆盖范围下,星基ADS-B系统对航班的平均监视时间为134 s;在监视时间内,7架航班位置消息更新概率大于97%、水平位置误差均方根小于550 m,均满足ATM系统5海里间隔监视性能标准[8]。
为评估星基ADS-B系统在单载荷覆盖范围下的监视性能,对“天拓三号”2016年10月17日至24日下传数据进行整理,筛选出位置消息数量大于50的航迹共4 281条,统计每条航迹水平位置均方根误差及位置更新间隔,汇总统计结果如图11、图12所示。

图11 水平位置误差均方根误差分布

图12 位置更新概率分布
可以看出,在7日数据汇总统计图中水平位置误差均方根小于550 m。位置更新概率大于90%的比例为76.9%。
6 结 语
针对星基ADS-B系统监视性能评估需求,参考民航现有标准设计实现星基ADS-B监视性能评估软件,并利用“天拓三号”实验数据对监视性能评估软件进行测试。
测试结果表明:(1) 单颗卫星载荷覆盖范围下,水平位置误差均方根小于550 m,满足ATM系统5海里间隔监视性能标准;(2) 7日数据汇总统计中,位置更新概率大于90%的比例为76.9%,表明在单颗卫星载荷覆盖下,星基ADS-B系统存在航空器位置消息接收数量不足的问题。
猜你喜欢
数学小灵通(1-2年级)(2020年11期)2020-12-28 00:41:14
通信产业报(2020年43期)2020-01-15 06:38:43
青年歌声(2019年12期)2019-12-17 06:32:32
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:44
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
舰船科学技术(2015年8期)2015-02-27 15:38:47
中国卫生(2014年12期)2014-11-12 13:12:26
中国卫生(2014年8期)2014-11-12 13:00:50
中国卫生(2014年7期)2014-11-10 02:32:52