
Distributed state estimation for heterogeneous mobile sensor networks with stochastic observation loss
2022-03-08 03:26YingrongYUJianglongYUYishiLIUZhangREN
Chinese Journal of Aeronautics 2022年2期
Yingrong YU,Jianglong YU,Yishi LIU,Zhang REN
Science and Technology on Aircraft Control Laboratory,School of Automation Science and Electrical Engineering,Beihang University,Beijing 100191,China
KEYWORDS Consistency theorem;Heterogeneous sensor networks;Information fusion;State estimation;Stochastic boundedness
Abstract The problem of distributed fusion and random observation loss for mobile sensor networks is investigated herein.In view of the fact that the measured values,sampling frequency and noise of various sensors are different,the observation model of a heterogeneous network is constructed.A binary random variable is introduced to describe the drop of observation component and the topology switching problem caused by complete observation loss is also considered.A cubature information filtering algorithm is adopted to design local filters for each observer to suppress the negative effects of measurement noise.To derive a consistent and accurate estimation result,a novel weighted average consensus-based filtering approach is put forward.For the sensor that suffers from observation loss,its local prediction information vector is fused with the information contribution vectors of the neighbors to obtain the local estimation.Then the consensus weight matrix is designed for consensus-based distributed collaborative information fusion.The boundness of the estimation errors is proved by employing the stochastic stability theory.In the end,two numerical examples are offered to assert the validity of the presented method.
1.Introduction
Years of research and practice have proved that group collaboration,which maximizes efficiency with minimal cost through information sharing,has many advantages over individual.Effective sharing and fusion of scattered,dynamic,heterogeneous,multi-source observation information to realize perception in a complex environment is an integral part in the operation of multi-platform cooperative missions.State estimation is usually the basis and premise of follow-up control,guidance and decision making.The theory of state estimation for sensor networks has obtained widespread concern and been applied universally for its amplitude development foreground.Some examples of application are collaborative awareness,maneuvering target tracking,environment monitoring and scene modeling,etc.
Regarding the consistency fusion problem in state estimation,most researchers adopt a consensus-based filtering approach to process the observation information of the systems,and make attempts to solve the problems of topology switching,intermittent observationsor event triggering mechanism.In the distributed state estimation method,each individual of the network focuses on collecting and fusing its measurements with its current neighbors,and finally obtains an accurate state estimation result of the intended target.Lots of achievements on consensus-based distributed fusing theory have certified its advantages of accuracy,scalability,robustness,energy saving and consumption reduction.It is necessary for related platforms to reach consensus on a common situation to achieve an effective coordination.In view of the system characteristics of geographical dispersion and multi-source information,we need to study the corresponding information fusion method.
Generally,the consensus-based fusion algorithms can be divided into the following classes:Consensus on Measurements (CM),Consensus on Estimated values (CE) and Consensus on Information (CI).CM applies consistency to process local innovation portion.CE performs consensus for the processing of local state estimates.CI carries out the fusion of weighted information that represents the state and covariance to achieve consistency.
The measurements of sensor networks are usually subject to probabilistic information missing in engineering practice.Interference from the environment,high maneuverability of the target,the range limitation of sensor detection,radar silence,and sensor failure may all be the causes of this situation.When the sensor network suffers the problem of stochastic observation loss,the observation data arrives intermittently and the observation model will change accordingly.Note that such a phenomenon,which has a number of names like missing measurements,intermittent observations,incomplete measurements,observation loss,or measurement packet loss,has attracted considerable attention during the past few years,and a number of results have been available in the literatures.
Numerous research results have shown that distributed state estimation has advantages in dealing with the problem of observation loss.The sensors encountering measurement loss can use the information provided by their neighbors to modify the local state prediction,so as to obtain better estimation.Inspired by the study of target tracking under colored noise and information packet loss,Deng developed a new Unscented Kalman Filter (UKF) on the basis of maximum correntropy criterion and unscented transformation.Employing Kalman filtered compressed sensing strategy,a filtering estimation algorithm was proposed to analyze the error dynamics of the networks with intermittent observations.Under the diffusion Kalman Filter (KF) paradigm,Wang put forward a diffusion Cubature Kalman Filtering (CKF)algorithm in the presence of observation loss and demonstrated that the algorithm consumes less computation and communication resources in comparison with existing algorithms.Shi concentrated on the analysis and proof of the stochastic convergence of the filtering approach with observation loss.
This paper,which can be counted as deepening and complementing to the previous achievements,is related to the study of state estimation for heterogeneous networks composed of various sensors with different physical property,measurement uncertainty and sampling frequency.We focus on exploiting a decentralized Cubature Information Filter (CIF) for discrete-time nonlinear systems by utilizing the weighted average-consensus approach.The stochastic observation loss is considered in the steps of system modeling and fusion algorithm design.Furthermore,the soundness of the presented technique is assessed according to the boundedness analysis of the estimation errors.
The main contributions of the study can be summed up as follows:(A) the observation models of all the sensors studied in most literatureswere identical.However,the mobile sensor networks discussed herein are heterogeneous,which agrees with engineering practices more;(B) different from other distributed estimation algorithms considering intermittent observations,the proposed approach explores the loss of observation component in detail such that both frame drop(the observation vector completely loses) and dimension missing (some observation components lose) are considered.Furthermore,in view of the topological change caused by frame drop,the weighting coefficients are updated correspondingly during information fusion;(C) the stability analysis in Refs.did not discuss distributed CIF for heterogeneous systems with observation loss.In the paper,the estimation error is demonstrated to be limited in mean square,which is challenging due to the complex constraints of the networks.
The outline of this article is as follows.The next section models the heterogeneous sensor networks with observation loss in nonlinear dynamic systems.Section 3 develops a novel state estimation method and provides its stability analysis.We offer the emulation verification in Section 4 and then come to a conclusion in Section 5.
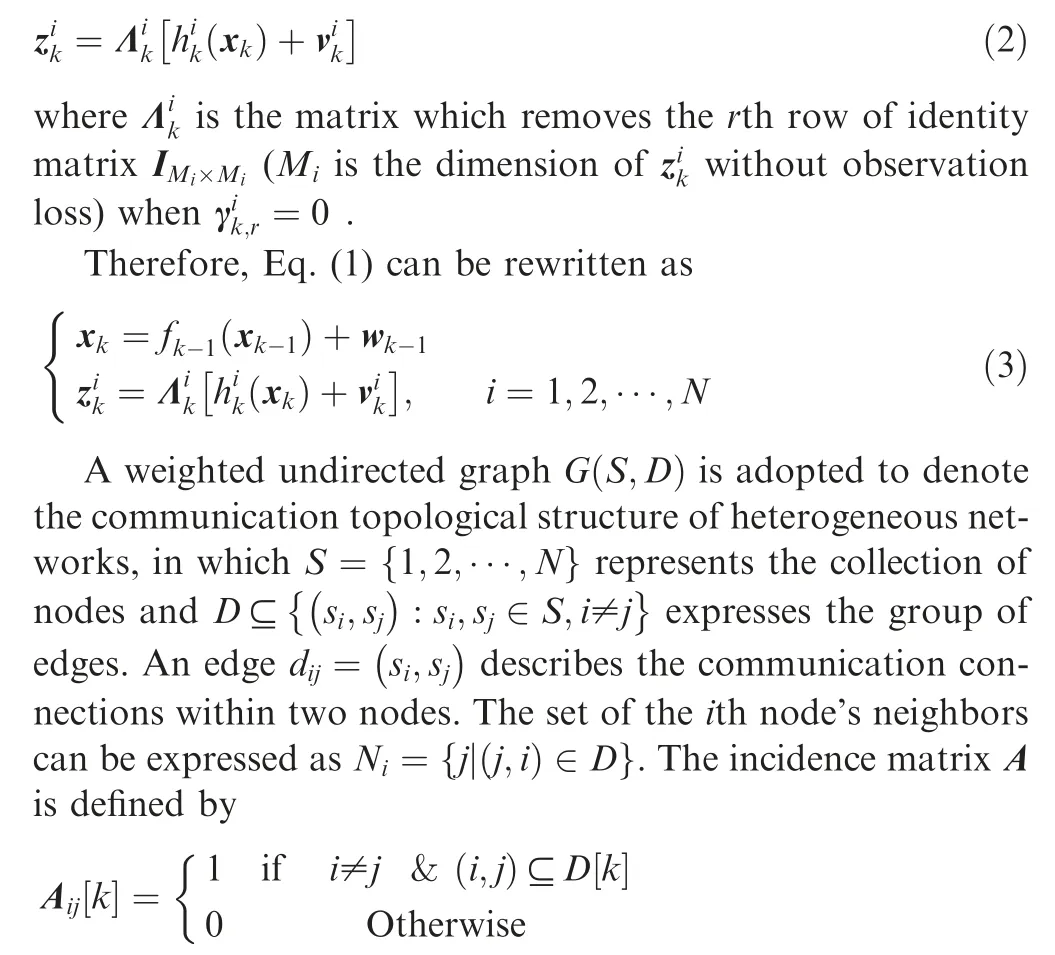
2.Problem statement
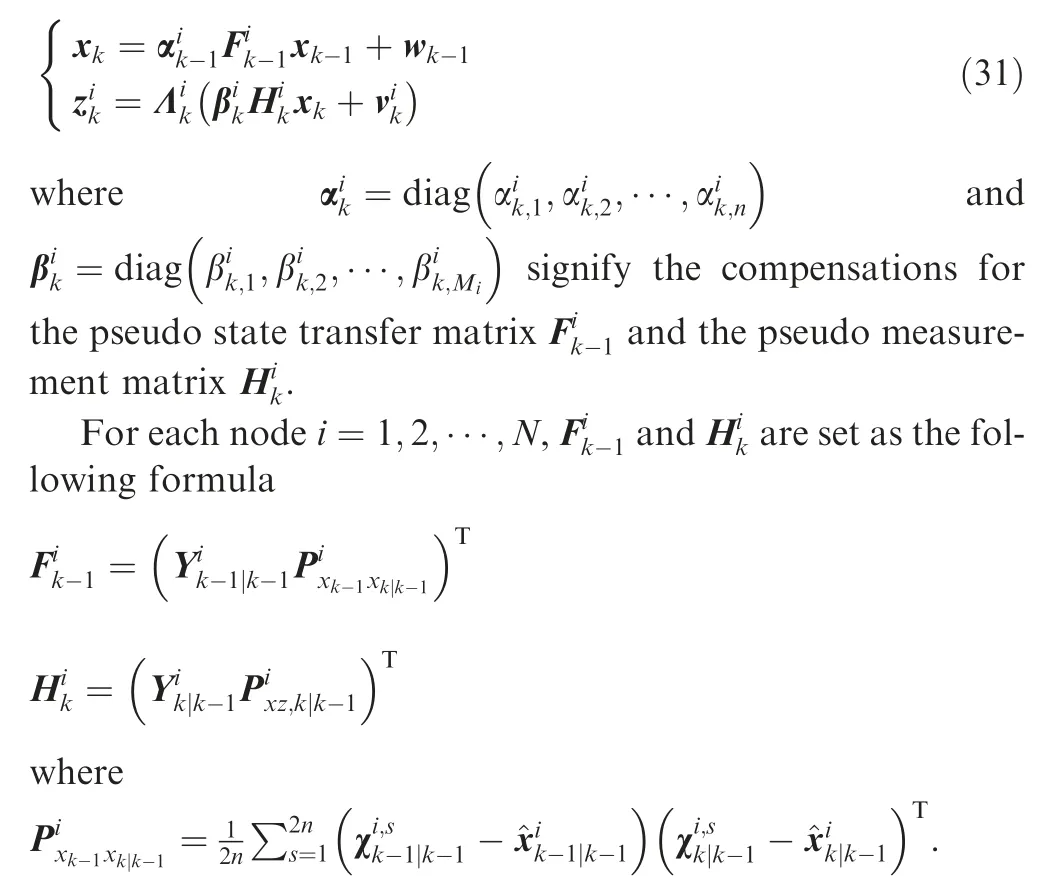
The nonlinear discrete-time model below describes a heterogeneous mobile sensor system composed ofsensors:


3.Main results
3.1.Cubature information filtering algorithm


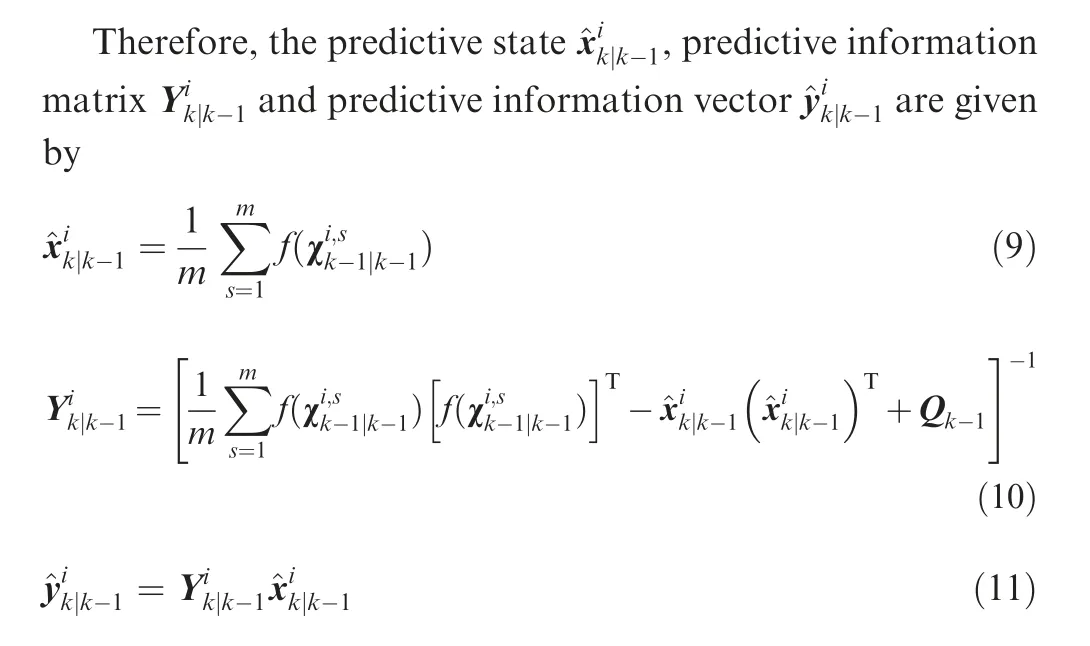
The CIF algorithm is summarized as follows:
Time update
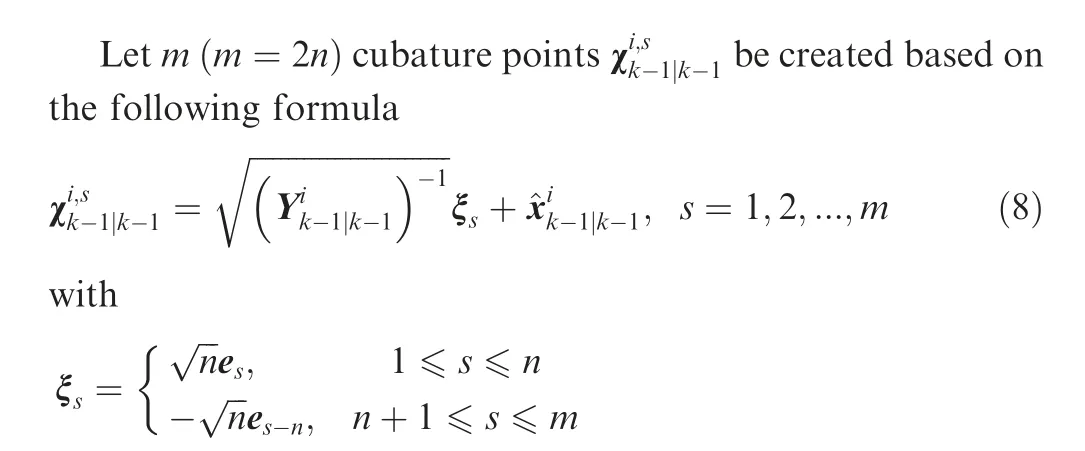
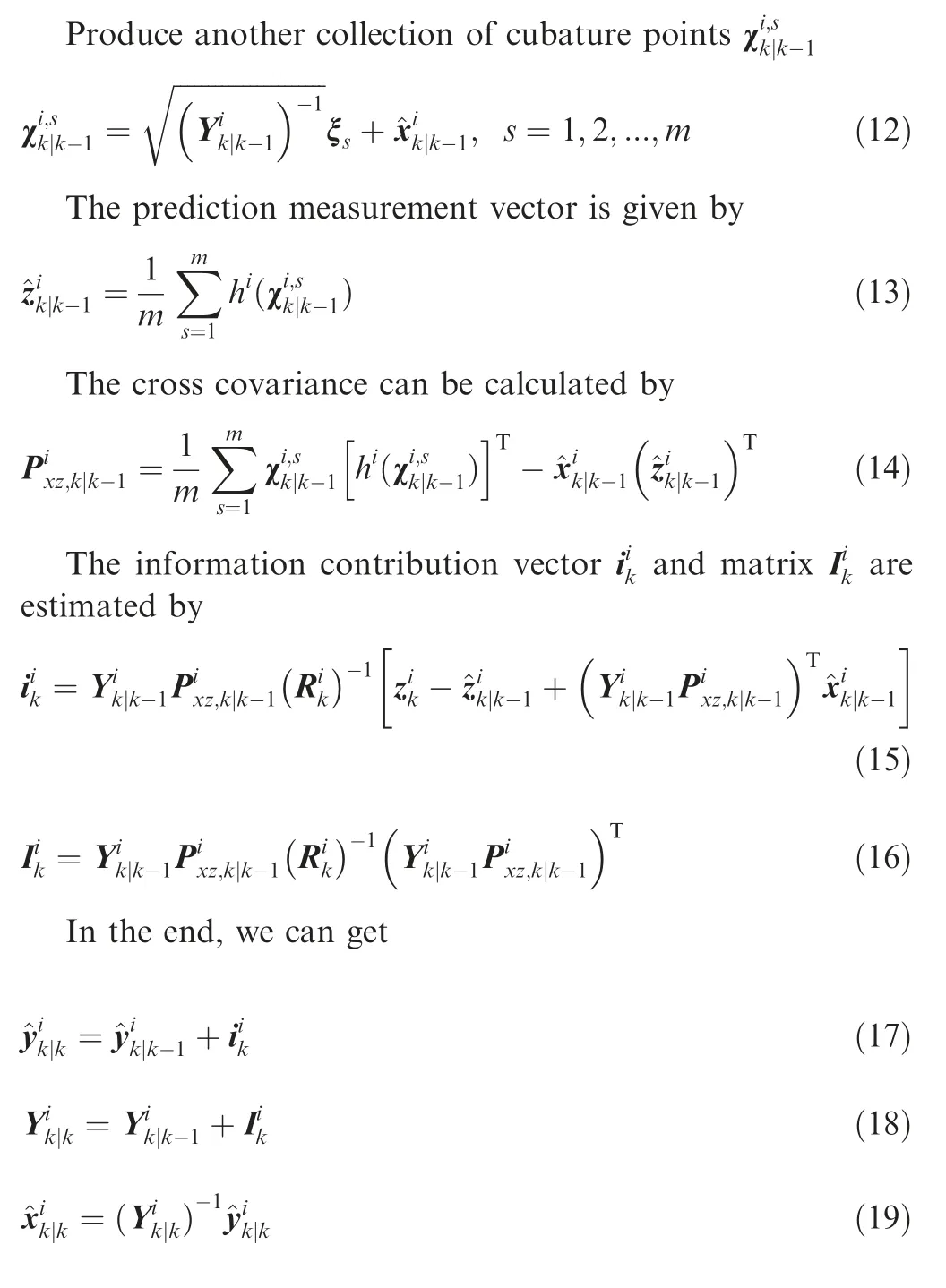
where eexpresses an-dimensional unit vector.Theth element of eis set to 1.
Measurement update
Remark 1..2+1,2.,,..
.
3.2.Distributed fusion filtering algorithm
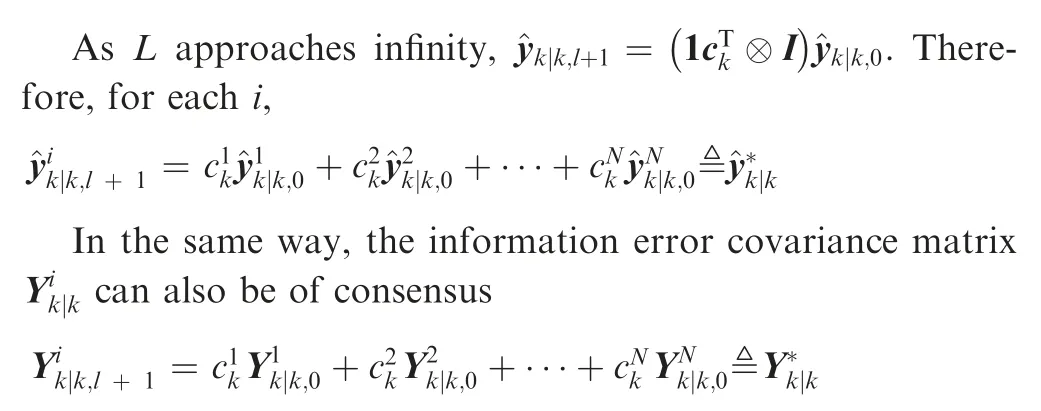
A weighted average consensus algorithm is developed here for distributed state estimation to increase the precision and make all the sensors reach an agreement on the estimated results.

The proof is completed.
Remark 3..,;,

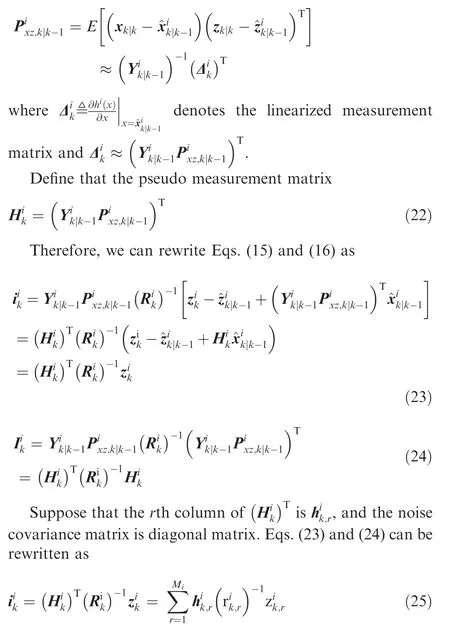
The information contribution vector and matrix of theth observation component can be defined as
It is worth noting that the missing component has no information contribution.
For heterogeneous mobile sensor networks,the dimension Mof different sensors may be unequal.Assume thatis the maximum of M,and the sensorwhose M<can be regarded as a node with dimensionthat suffers from the observation loss:

Therefore,the information contribution vector and matrix can be expressed as
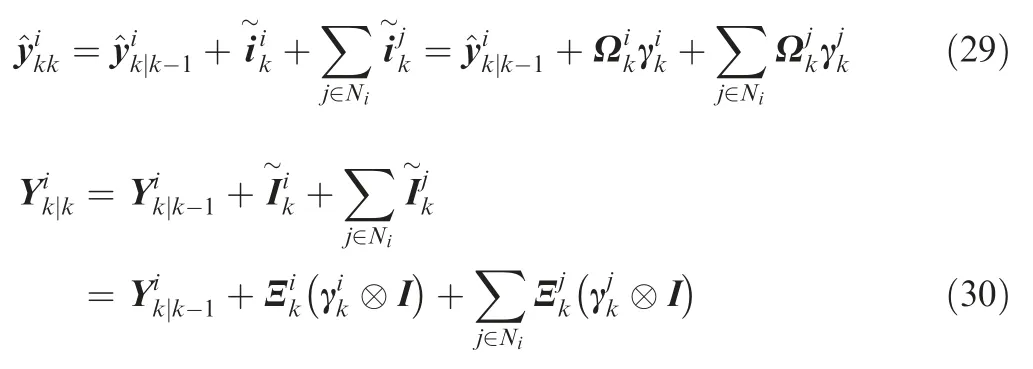
The updated local estimation results in Eqs.(29) and (30)will be the initial values of consensus iteration.
The distributed state estimation algorithm based on CIF is summarized as follows.The algorithm is attached to CI paradigm.
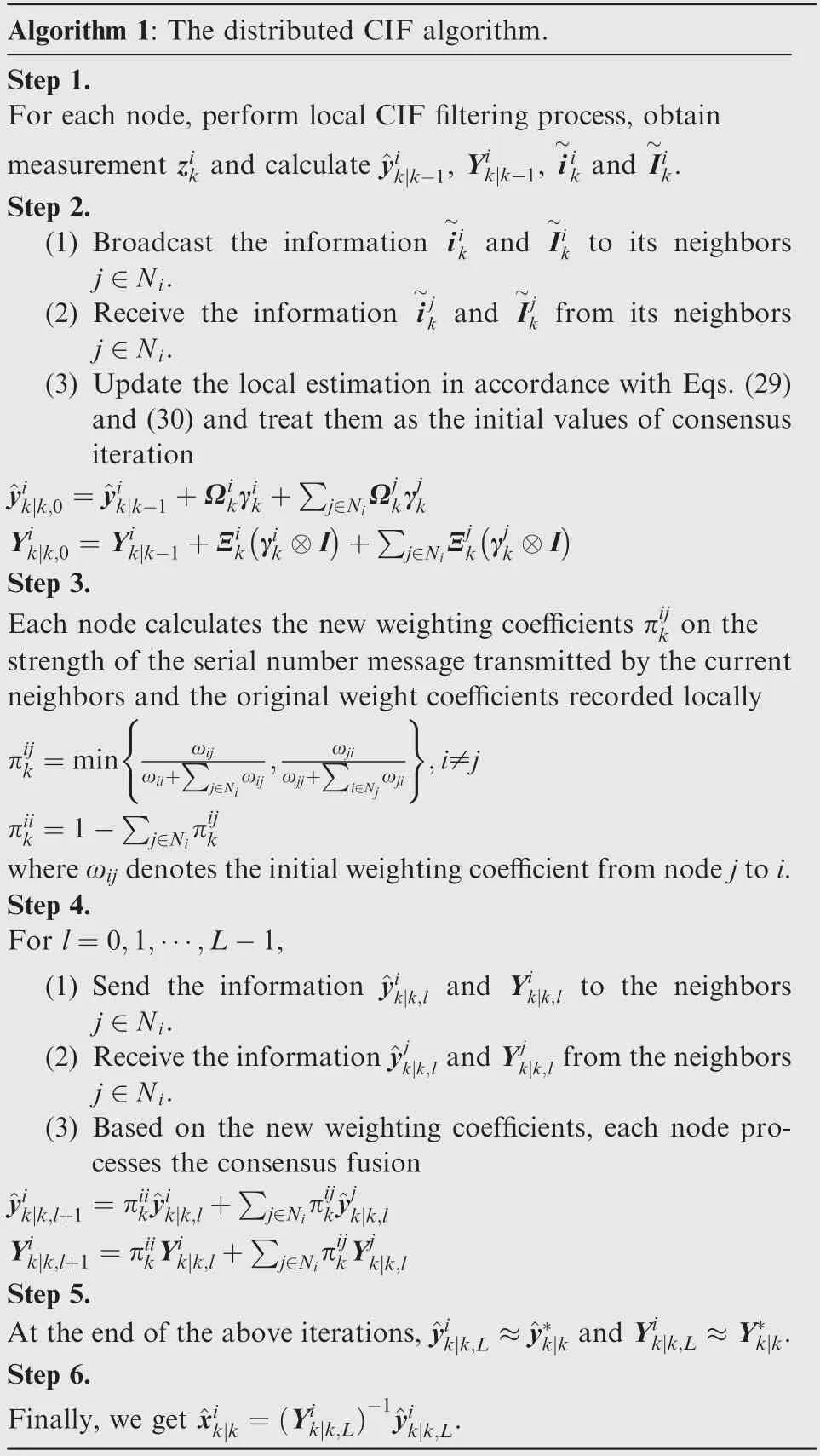
The node whose measurements are totally dropped at timedoes not participate in the information fusion in this period.Complete observation loss will cause topology change.Under this circumstance,the initial weight matrix no longer satisfies the conditions in Lemma 1.Therefore,it is necessary to recalculate the weighting coefficients.It is worth noting that,however the communication topology changes,it must maintain the connectivity.

3.3.Stability analysis
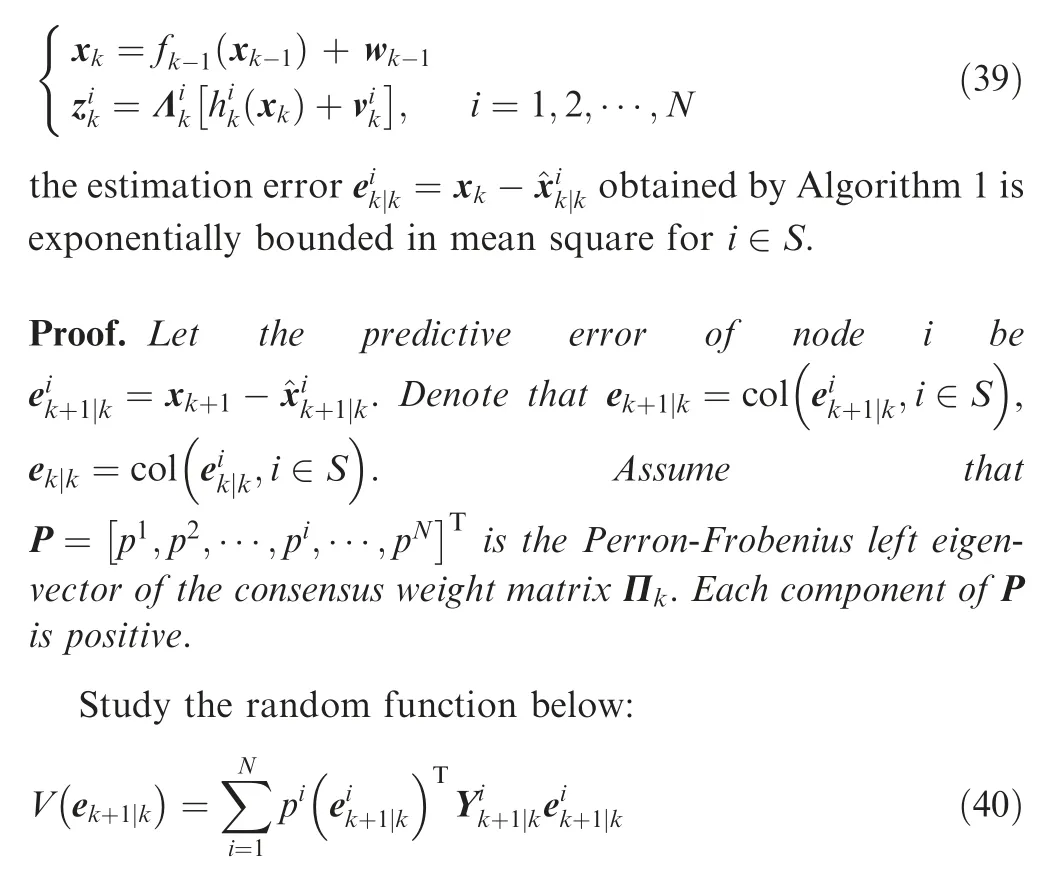
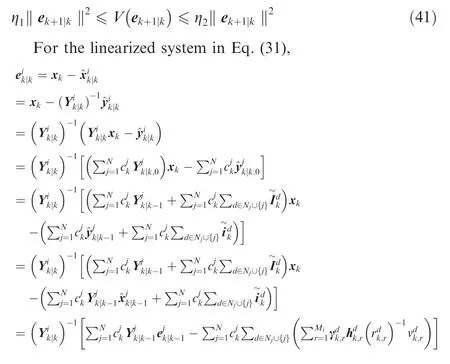
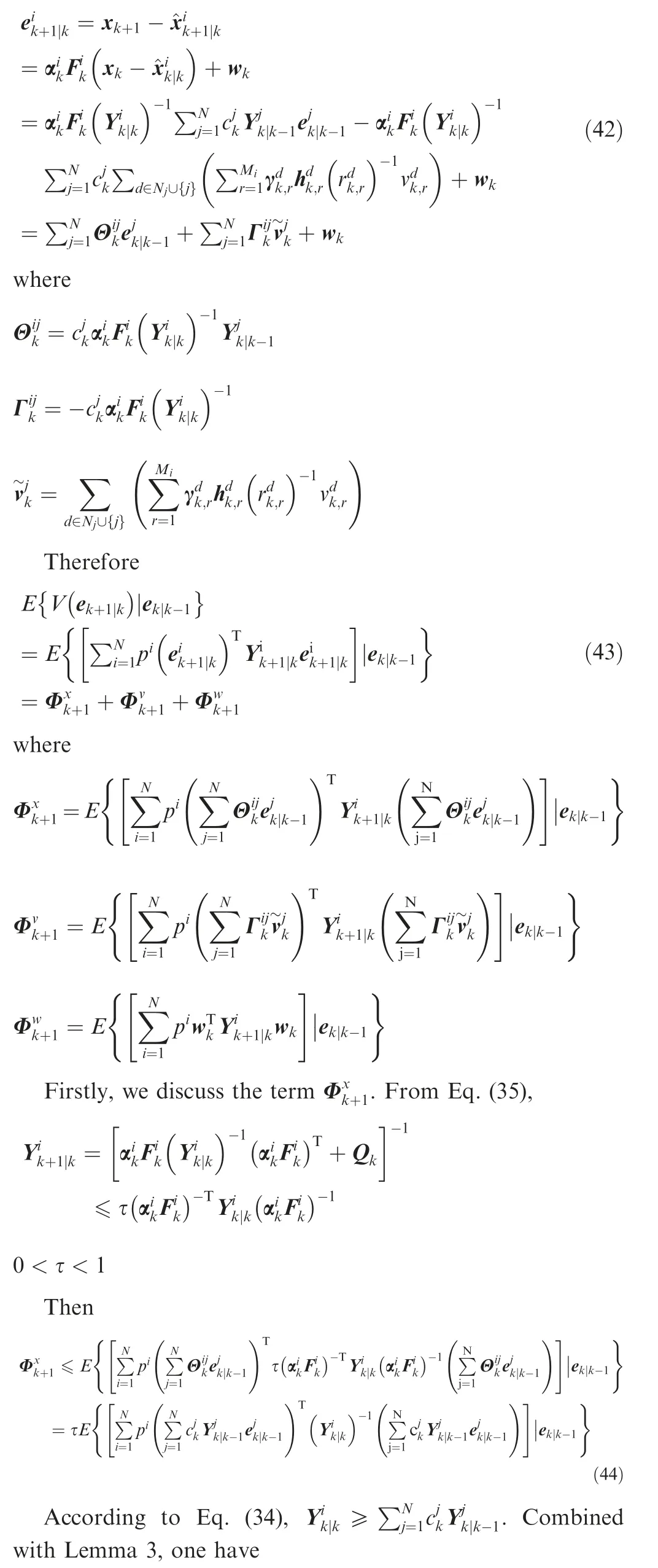
Refer to the Refs.,linearize the nonlinear system model in Eq.(3) and introduce the diagonal compensation matrices to compensate for the errors due to linear approximation.Therefore,the system model can be expressed as
Before the stability analysis,some assumptions need to be made about the above mathematical variables.Suppose that I is the identity matrix.
α,α,,,β,β,,
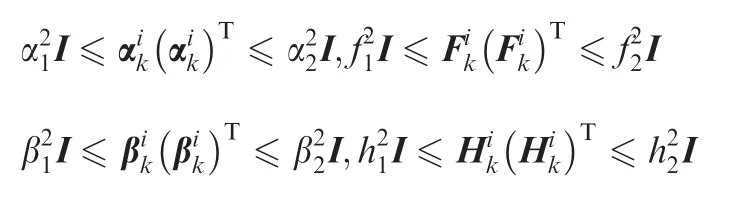

Assumption 1 ensures that the filtering result of a single sensor will converge.Assumption 2 shows that whether the system noise or observation noise are bounded.

are satisfied for ∀.Hence the random process is exponentially bounded in mean square:


for positive definite matrices A,A,···,Aand vectors v,v,···,v.
Theorem 3.12
According to Theorem 2,there are positive real numbers ηand ηsuch that the following formula is tenable
where vrefers to theth observation component of measurement noise v.
Hence,
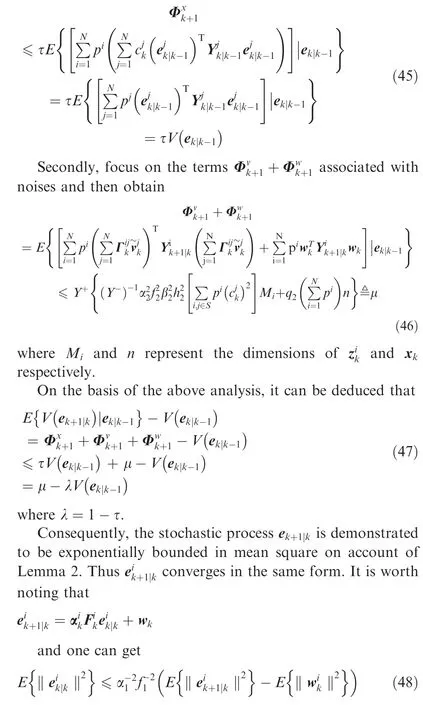
Finally,the conclusion can be drawn that the estimation error of the distributed fusion method presented here is exponentially bounded in mean square.

.
4.Numerical examples

The topological structure of the network is illustrated in Fig.1.There are six radars to obtain three-dimensional observation vectors,which are
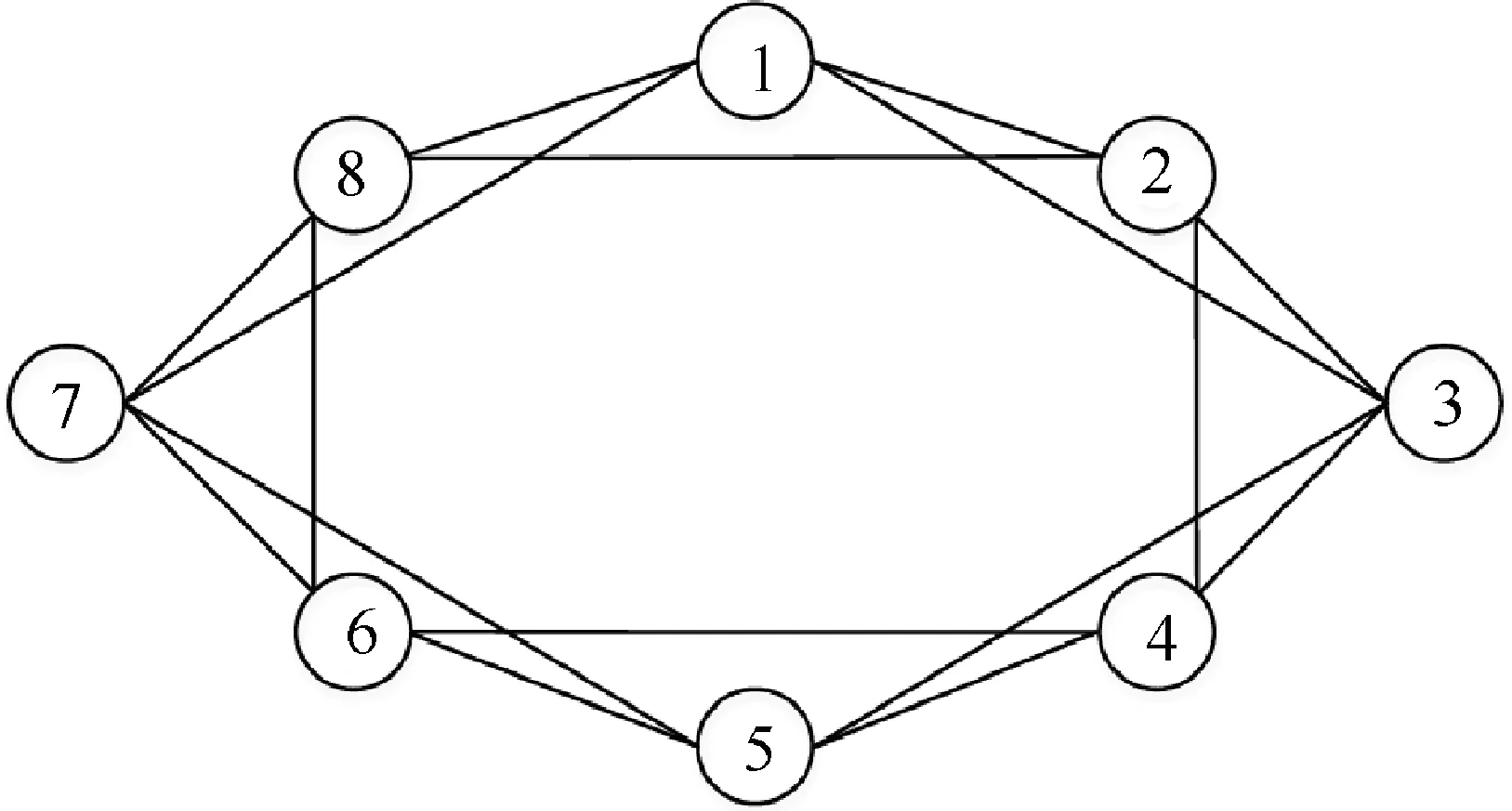
Fig.1 Communication topology with N=8 nodes.
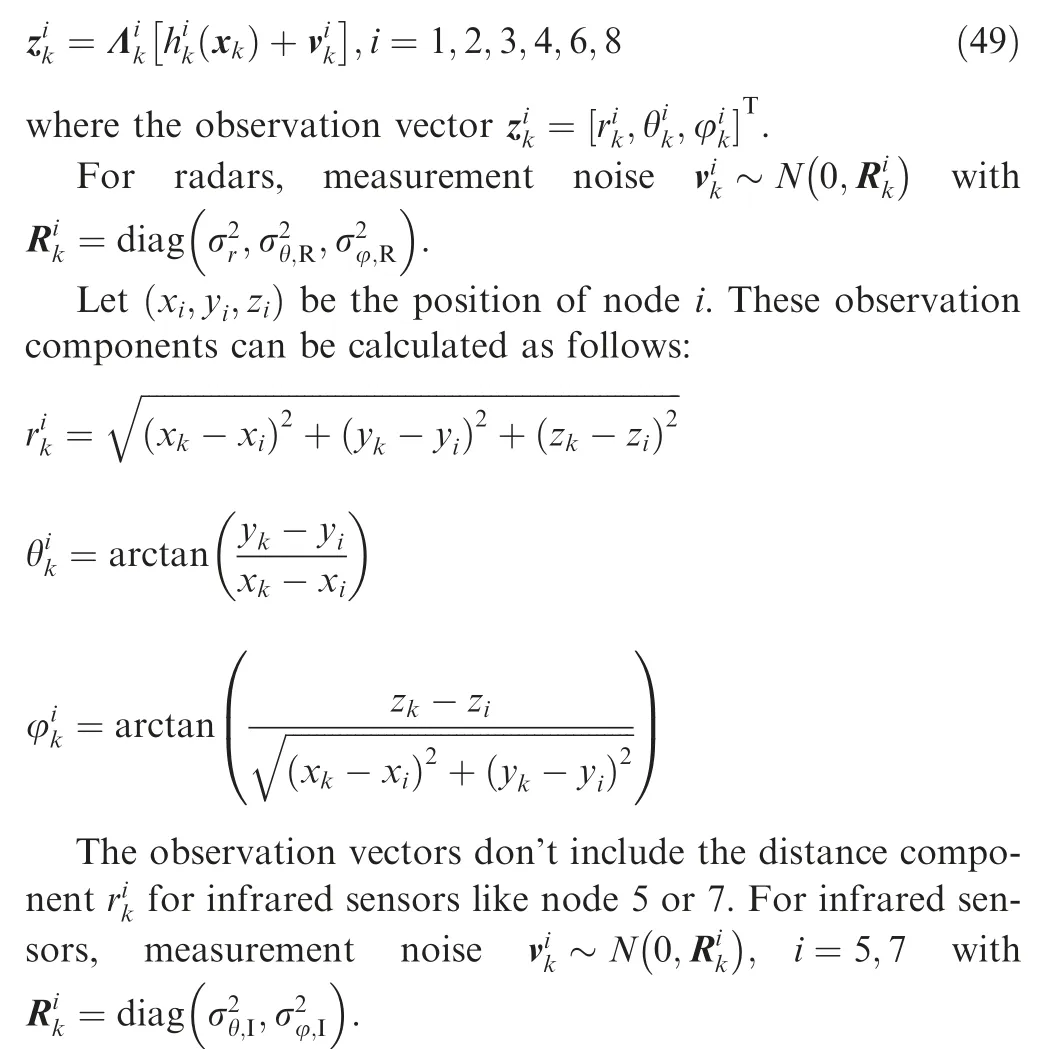
The angle measurement accuracy of passive sensors is often better than that of active ones.Hence,we set that σ=50 m,σ=σ=0.05 rad and σ=σ=0.01 rad.
The estimated performance of the approach can be appraised by the Root Mean Square Error (RMSE)

Fig.2.Comparison of tracking performance.
4.1.Example 1
As Fig.2 shows,the blue curve refers to the estimated outputs employing the IMM-CIF algorithm of a single sensor.Meanwhile,the green one portrays the performance of Algorithm 1 for multi-sensor system.The comparisons of tracking errors of two methods are elaborately demonstrated in Fig.3 and Table 1.The following conclusions can be drawn:
Fig.3 Comparisons of estimation errors.
Table 1 Error comparisons.
(1) The filtering algorithm can reduce the error caused by observation noise to state estimation to a certain extent.
(2) Compared with traditional filtering algorithm for single sensor,distributed state estimation method for multisensor systems can drastically improve the accuracy of target state estimation.
(3) The method put forward in the paper is suitable for heterogeneous mobile sensor networks.
4.2.Example 2

The simulation results demonstrated in Fig.4 and Table 2 suggest that for single node filtering method,as the probability of obtaining the measurements decreases,the RMSE of position gradually increases which signifies that the tracking error gradually increases.Fig.5 depicts the comparison of tracking performance between the single node filtering method and the proposed algorithm for multi-sensor network.Under the same probability of observation loss (δ=0.5),the average value of RMSE of Algorithm 1 is just 3.2894 m,which indicates that this algorithm can effectively suppress the negative impact of observation loss on filtering accuracy,and has better estimation performance than single-node tracking.
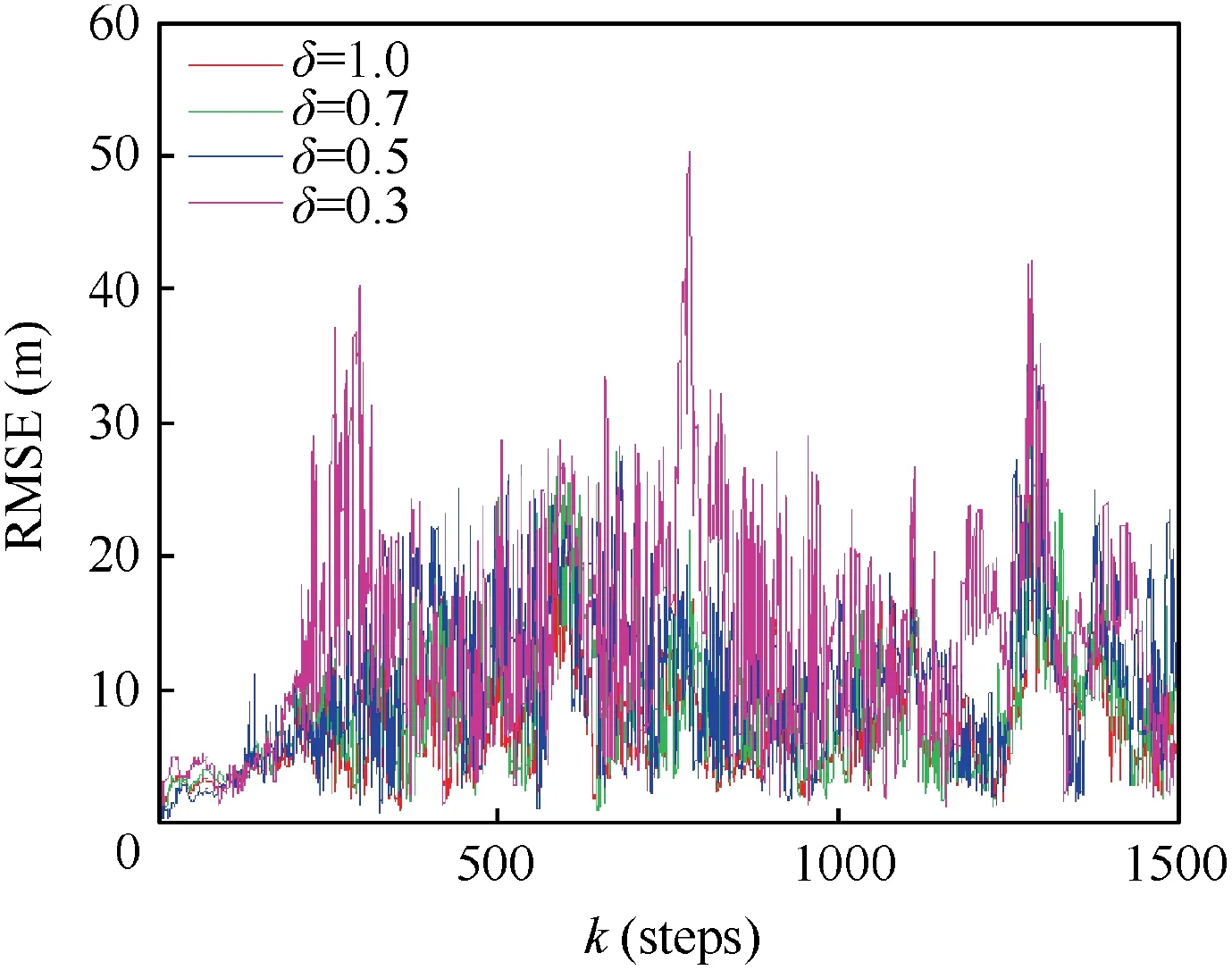
Fig.4 RMSE of single node filtering with different δ

Table 2 RMSE of single node filtering with different δ (m).
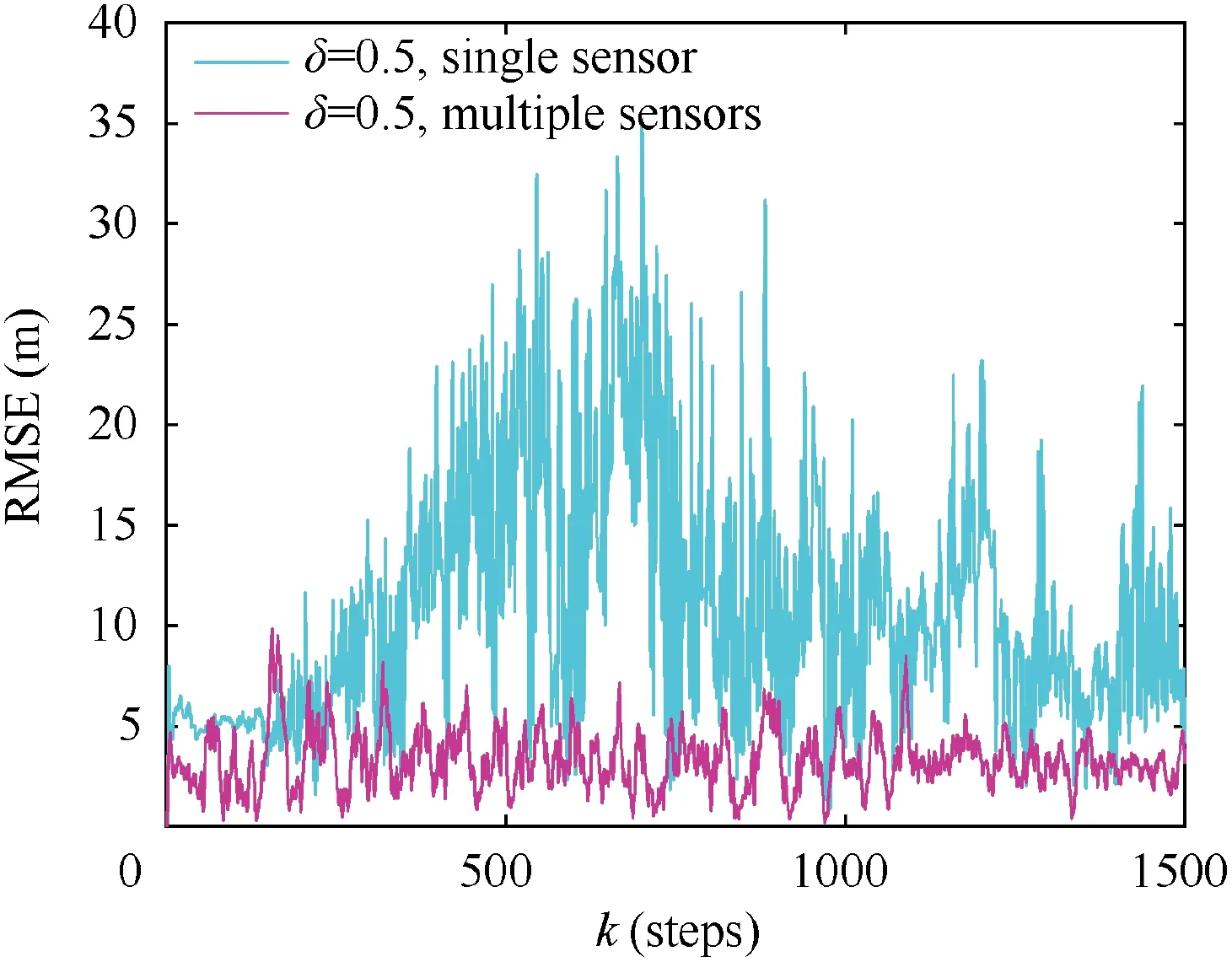
Fig.5 Comparison of different algorithms with δ=0.5
5.Conclusions
(1) This paper aimed at addressing the distributed state estimation problem in nonlinear setting.A novel consensus filtering algorithm for heterogeneous mobile sensor networks with stochastic observation loss was derived from CIF and the weighted average consistency approach.The Metropolis weight matrix was used for weight design.Observation loss and topology changes were considered in system modeling and algorithm design.
(2) The boundedness of the information matrix and the information prediction matrix had been proved.On this basis,the stochastic boundedness of the estimation errors for the discussed networks was studied for the assessment of the approach’s stability.
(3) The mathematical simulation results were consistent with the theoretical analysis results.
The quantized filtering will be discussed in the research about networked information processing in the future work.
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
This work was supported by the Science and Technology Innovation 2030-Key Project of‘‘New Generation Artificial Intelligence” of China (No.2020AAA0108200),the National Natural Science Foundation of China (Nos.61873011,61922008,61973013,61803014),the Innovation Zone Project of China (No.18-163-00-TS-001-001-34),the Defense Industrial Technology Development Program of China (No.JCKY2019601C106),and the Special Research Project of Chinese Civil Aircraft,China.
 Chinese Journal of Aeronautics2022年2期
Chinese Journal of Aeronautics2022年2期
- Chinese Journal of Aeronautics的其它文章
- Pressure-induced instability and its coupled aeroelasticity of inflated pillow
- Adjoint boundary sensitivity method to assess the effect of nonuniform boundary conditions
- Transit time difference and equal or non-equal transit time theory for airfoils with lift
- A boundary surrogate model for micro/nano grooved surface structure applied in turbulence flow control over airfoil
- Nonlinear uncertainty quantification of the impact of geometric variability on compressor performance using an adjoint method
- High precision and efficiency robotic milling of complex parts:Challenges,approaches and trends