MW级飞轮阵列在风光储能基地示范应用
2022-02-19 08:39李树胜王佳良李光军汪大春崔亚东
储能科学与技术 2022年2期
李树胜,王佳良,李光军,汪大春,崔亚东
(北京泓慧国际能源技术发展有限公司,北京 101300)
传统的电网系统仍然以火力发电为主,目前中国的火力发电占比达到50%以上,同时火力发电还需承担繁重的调峰调频任务。随着新能源技术的快速发展,以风力发电、太阳能发电等为主体的可再生发电系统占比正在逐步增加,其具备较好的可再生性、绿色环保等优势,未来将有望取代火力发电形式,保守估计到“十四五”末我国可再生能源装机量将超过50%。尽管发展迅速,但是从发电本质上看,风力发电和太阳能发电等具有天然的发电不稳定性和间歇性,发电输出随风力大小、光照强弱的不同而出现较大波动,其大规模并网和使用将在不同程度上影响主电网的稳定性和可靠性[1-5]。
同时从用户侧看,用电负荷具有一定的随机性、间断性和冲击性,发电供给和用电需求通常会存在容量矛盾(昼夜波动、季节性波动、经济周期波动),从而导致发电、输电和变电设备的利用效率降低,并严重影响一次能源的利用效率。因此,当发电侧电能不稳定和用电侧负荷不确定同时存在情况下,电网的供需矛盾将进一步恶化,严重时会导致发电跳机,造成大面积停电。例如,2019年英国由于电网网络故障而突发大面积停电,导致铁路、机场、公路等严重受阻,数百万人受影响,究其原因与英国可再生能源发电占比较高存在直接关系。
解决发电和用电供需矛盾的有效手段是在发电系统中并入大规模储能装置。通过储能装置不断地储能和释能过程,提高一次能源和输变电设备的利用效率,对新能源进行削峰填谷、平滑功率输出、改善电能质量。目前新型电储能装置以抽水蓄能和电化学储能为主,其他储能方式如飞轮储能、超级电容储能、压缩空气储能等也在不断发展。其中,基于磁悬浮轴承、高效率电机控制和低真空技术等的飞轮储能系统[6-11],具有响应速度快、使用寿命长、功率密度高且不受地理环境影响等优势,是最有发展前途的储能技术之一。飞轮储能技术对于解决电网短时(秒级到分钟级)、高频次(上千万次充放电)、深度充放电等调度需求具有很大优势,是最优质的调频资源。同时飞轮储能可辅助抽水蓄能和电化学储能等长航时储能装置进行调峰、调频,提高机组的使用寿命,即所谓混合储能方式。
目前,国内飞轮储能技术已研究多年,涌现出以清华大学、北航、华北电力大学、山东大学、华中科技大学等高校,以及以北京泓慧国际能源技术发展有限公司等企业为主的飞轮储能研究机构和制造企业,其应用领域包括飞轮UPS、地铁和石油行业等能量回收、脉冲电源等。近两年飞轮储能技术在新能源储能调频领域的应用刚刚开始,据了解国内已有部分研究案例,包括华北电力大学对飞轮在风电功率平抑和火电调频方面研究、山东大学对飞轮在电网中的一次调频控制研究、清华大学对飞轮五十年发展进行综述研究等[12-15]。但查阅文献可知,目前在新能源以及电网储能调频领域,飞轮系统方案设计和实验验证等研究资料相对缺乏,其研究力度还远远不够,在工程示范应用中可借鉴的设计资料较少。
基于此,在国家重点研发项目支持下,以北京泓慧国际能源技术发展有限公司自主研发的250 kW/3 kW·h、250 kW/50 kW·h 两款飞轮储能系统为应用对象,搭建了MW级飞轮储能阵列,用于实现飞轮与电网侧并网时的快速充放电功率调节,来模拟新能源发电调度过程,并分别在天津和青海风光储能基地进行了首次示范应用,为飞轮阵列在新能源和电网等储能调频领域的工程应用提供解决方案。本文从整个飞轮阵列系统组成、工作原理、储能基地接入拓扑以及实验验证等方面对飞轮储能阵列进行详细介绍。
1 磁悬浮飞轮储能阵列系统
1.1 飞轮单体组成
北京泓慧国际能源公司有功率型和能量型两款主打飞轮产品,型号为HHE-FW2503、HHE-FW2550,额定功率均为250 kW,最大储电量分别为3 kW·h和50 kW·h,可覆盖30 s~9 min 的功率和能量支撑。按照飞轮内部定义,功率型飞轮结构紧凑、占地小、功率密高且转速较高,适合于瞬间大功率支撑场合,如飞轮UPS、地铁能量回收利用、石油钻机冲击负荷平抑等;能量型飞轮储电量较大、能量密度高,转速较低且运行更稳定,适合于长时间的储能场合,如新能源调频、火电一次调频、AGC调频等。这两款飞轮产品结构相似,FW2503采用径向和轴向全电磁轴承支撑方式,FW2550采用轴向磁轴承加径向机械轴承支撑方式,以后者为例其结构如图1 所示[16-21]。飞轮单体由密封壳体、永磁同步电机定子和转子、飞轮转子、轴向电磁轴承、高压真空电极、机械工作轴承和机械保护轴承等组成。其中,电磁轴承由轴向磁轴承以及位移传感器组成,磁轴承用于产生轴向吸力,在控制器作用下使得飞轮转子悬浮在轴向中心位置,位移传感器用于实时测量飞轮转子的轴向位移,作轴向位移闭环控制。三相永磁同步电机作为飞轮转子驱动机构,通过电机的充放电控制实现外部电能与飞轮动能的相互转化。机械工作轴承用于转子轴的一级约束和防护。机械保护轴承用于保护电磁轴承,防止转子跌落损坏磁轴承。密封壳体用于固定飞轮组件,使腔体保持一定的真空水平。
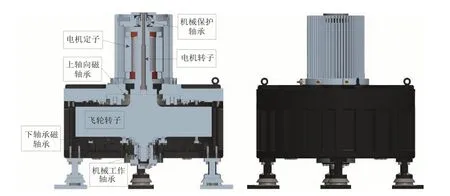
图1 飞轮本体外形和内部结构Fig.1 Outline and internal structure of flywheel body
1.2 飞轮充放电系统组成
许多文献对飞轮充放电原理已经做了介绍,不再赘述,本文重点说明飞轮充放电系统的组成。如图2 所示,以三相永磁同步电机为例(可设置为多相、感应子式等),电气部件包括电机本体、充放电控制器及机侧变流器(简称FCS)、电流传感器、磁悬浮控制器(简称MCS)、辅助监测设备(简称ADS)、飞轮管理器(简称FMS)、阵列控制器(简称FAS)等。其中,FCS 用于实现外部直流电能与转子动能之间的转化,输入为直流母线电压Udc,输出接入飞轮电机U/V/W侧,电流传感器用于测量电机三相电流信号。MCS 用于控制飞轮转子的悬浮启停,输出控制电流叠加到磁轴承线圈中,改变磁轴承线圈产生的磁力大小以实时调整飞轮转子位移量。ADS 用于实时测量本体状态信息,包括真空度、振动值、定子温度、轴承温度、倾斜角度等。FMS 负责本体的健康监测和失效评估,接收ADS数据实时获取本体状态信息,接收MCS 数据实时获取磁悬浮运行状态信息,同时接收FCS 数据实时获取电机运行状态信息。FMS融合ADS、MCS、FCS数据得出本体健康值,与FAS进行交互,FAS根据阵列参数输出单机功率至FCS 进行充放电控制。

图2 飞轮充放电系统Fig.2 Working principle of flywheel chargedischarge process
1.3 飞轮阵列系统拓扑结构
飞轮阵列系统拓扑结构如图3所示。从经济性和占地面积等方面考虑,飞轮阵列系统通常设计为直流并机结构,即多台飞轮单机通过独立FCS 在直流侧进行并联,市电侧可配置高容量的储能变流器PCS。通常,1台PCS可实现飞轮直流并机个数控制在8台以内。多台PCS通过串接熔断器和接触器,直接并联至电网公共母排上,形成更大容量的交流储能系统。其中,PCS完成网侧到直流侧AC/DC变换,FCS完成直流侧到机侧DC/AC变换,两者均为双向变流器,可工作于逆变和整流状态。
如图3 所示,上位机(能量管理系统)通过总线方式可分别控制PCS 和FCS,实现飞轮阵列的充放电运行。以飞轮阵列1 为例,FCS1 对应飞轮单机1,FCS2 对应飞轮单机2,且FCS1 和FCS2 以及PCS1 共用1 组直流母线。FCS1 作为阵列主控制器,FCS2 作为从控制器,由FCS1 作直流稳压闭环控制,输出总的功率并分别下发给两台机侧变流器作阵列充放电运行。FCS1 和FCS2 对外特性表现为直流稳压电源,由PCS1 作PQ 源,响应上位机有功功率和无功功率调度,从而实现电网侧功率支撑和储能需求。
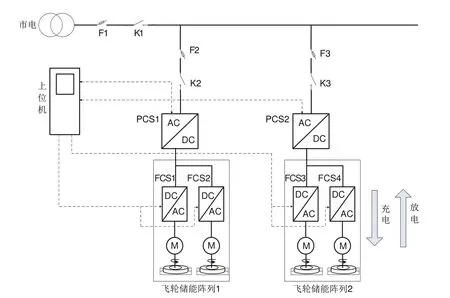
图3 飞轮阵列系统拓扑图Fig.3 System topology of flywheel array
2 风光储能基地增加飞轮阵列方案
2.1 系统拓扑结构
基于国家某重点研发项目,于青海西宁市风光储能基地开展MW级飞轮阵列并网运行示范工程建设,验证飞轮储能阵列并网运行特性并进行示范应用,阵列接入拓扑如图4所示,通过升压变并联接入高压母线并网,如10 kV母线。
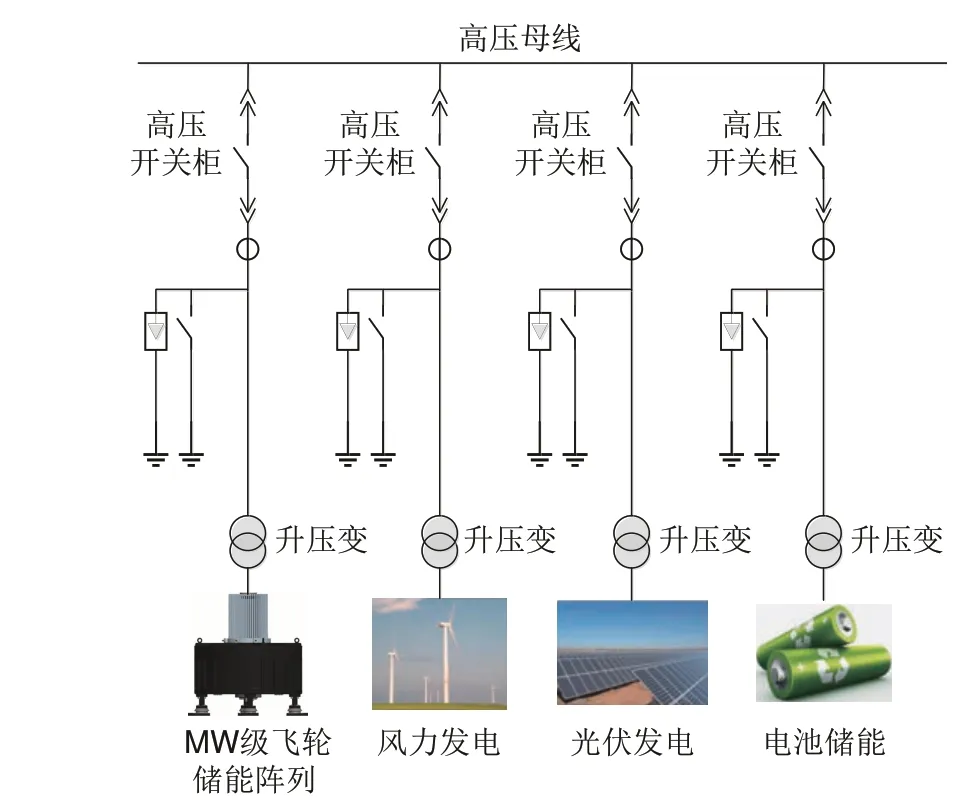
图4 MW级飞轮阵列接入拓扑图Fig.4 Access topology of the MW flywheel array
MW 级飞轮储能阵列由3~4 台飞轮单机组成,通常可采用集装箱形式,每个集装箱内集成了飞轮单机所有组件。飞轮阵列监控通信框架如图5 所示,监控平台可称作能量管理系统(简称EMS),运行飞轮阵列并网算法,通过以太网总线与阵列控制器通信;阵列控制器运行所有飞轮单机监控程序,通过以太网总线与飞轮单机控制器(即充放电控制器+飞轮管理器)通讯,下发遥控指令、遥调数据,并接收飞轮单机的遥测数据和遥信状态。二次集装箱为其他测控或继保装置。以上,以太网总线通信协议为Modbus TCP/IP或者104协议。

图5 飞轮阵列监控通信框架Fig.5 Monitoring communication diagram of flywheel array
2.2 电网、光伏发电、风力发电模型
在整个电网功率调节控制系统中,飞轮储能阵列与网侧储能变流器PCS 在EMS 的控制下实现飞轮侧与电网侧的能量交互,进而完成飞轮阵列的充放电控制过程。工作模式分为本地和远程两种,在本地模式下,PCS 和FCS 由各自触摸屏操作控制并将所有数据传给EMS;在远程模式下,PCS 和FCS 同时受EMS 指令控制。在两种模式下,整个控制逻辑均需要分为3个过程:预充电过程、自主运行过程和保护过程。
2.3 光伏发电模型
光伏电池根据光生伏打效应制成,类似于1组PN 结构,输出电流和电压与光照强度、温度等有密切关系。光伏组件通常由单个光伏电池进行串并联得到,其对外特性可等效为1组光伏电池。光伏电池的等效模型与P-U、I-U曲线如图6所示[22]。

图6 光伏电池等效模型与P-U、I-U曲线Fig.6 Equivalent model of solar battery and curves of P-U and I-U
可以看出,光伏电池是一个非线性的直流源,其输出电压增大而电流几乎不增大,直至拐点,在该拐点处光伏电池输出功率达到最大值。由于光照强度、温度等外界环境改变,光伏电池输出电流发生变化,即使在最大功率跟踪控制即MPPT下,其输出功率也随之变化。
2.4 风力发电模型
风力发电机是比较成熟系统,不再赘述,仅以双馈风力发电机为例,其系统结构如图7所示。双馈型风力发电机系统由风力机、传动轴、感应电机、背靠背AC/DC/AC 变流器及控制器等组成[23],通常作电流源输出至三相电网。

图7 双馈风力发电机系统结构Fig.7 Structure diagram of doubly-fed wind generator system
感应电机通过风力机捕获风能,将风能转化为机械能后,通过传动轴后生成发电机输入机械转矩带动发电机转子旋转,再通过交变直变交接入电网。风力机捕获的机械功率与机械转矩为

式中,k1为相关常数;cp为风能利用系数;vwind为风速,m/s;ωd为风轮角速度rad/s。可以看出,风机输出功率直接取决于风速大小、风能系数等参量。
2.5 飞轮储能阵列容量配置
由上可知,光伏和风力发电均存在很大的不确定性,需配置飞轮等储能装置参与调频调峰任务,确保发电的最大化收益。飞轮储能阵列总体方案设计时,需要重点关注两个设计指标:总功率和总储电量。考虑发电机组的总容量,通常配置5%~10%的储能装置。
基于一次调频经验,飞轮储能阵列需至少满足30 s~2 min 的能量支撑。北京泓慧公司自主研制的FW2503和FW2550即可满足这类短时高频次和分钟级储能需求。FW2503和FW2550的整体系统参数配置见表1、表2,可供用户选择。

表2 FW2503飞轮单机性能参数Table 2 Performance parameters of FW2503 flywheel single machine
3 飞轮阵列充放电测试验证
3.1 平高储能基地实验测试
2020 年北京泓慧能源公司交付了平高集团500 kW 飞轮交流能量系统,并在天津储能基地开展了性能测试[24]。现场实验装置如图8 所示,由两台FW2550 飞轮单机组成阵列作直流并机,配置2台250 kW逆变器和1台500 kW网侧PCS,用于响应电网侧调度指令。飞轮本体采用地埋式安装于地坑中,电控系统集成于1个集装箱内。

图8 飞轮阵列天津实验现场Fig.8 Experimental platform of flywheel array established in Tianjin
3.2 飞轮阵列长时充放电实验测试
飞轮阵列上电后,首先进入预充电过程,网侧PCS作直流稳压,直流母线电压稳定在720 V。两台飞轮在FCS1 和FCS2 控制下,同时充电加速至3700 r/min 待机。之后,网侧PCS 切换至PQ 模式,由飞轮阵列作直流稳压,飞轮1作主机,飞轮2 作从机,直流母线电压稳定在670 V。之后,由PCS 作+PQ 控制,功率设定为+500 kW,飞轮阵列以500 kW 进行充电至7000 r/min;之后,PCS转入-PQ 控制,功率设定为-500 kW,飞轮阵列以-500 kW进行放电至3700 r/min。如此反复,单个周期内网侧PCS直流功率和电压曲线,飞轮1和2的转速、功率、电压曲线如图9所示。

图9 天津储能基地飞轮阵列充放电实验曲线Fig.9 Charge-discharge experimental curves of flywheel array system established in Tianjin
如图9(a)所示,网侧PCS监测到直流电压稳定在670 V,功率值分别为+500 kW、-500 kW。如图9(b)、(c)所示,在直流母线侧接入示波器监测直流电压和电流,可以看到±500 kW功率切换时,从电流开始变化的A 点到完全稳定的B 点历时40 ms左右,同时充放电转换时间小于20 ms(-90%~+90%功率段),响应时间小于10 ms(-90%~0 和0~+90%功率段),性能优越。如图9(d)、(e)所示,飞轮1 和2 的充放电功率分别达到±250 kW,充电时飞轮转速从3700 r/min 升至7000 r/min,放电则反之;横轴为具体时间,时间段为15:09:52—15:26:31,在3700~7000 r/min充放电维持时间超过8 min。
3.3 青海风光储能基地示范应用
2021年6月,在国家“十三五”某重点研发项目支持下,项目组采用4套北京泓慧能源公司自主研制的FW2503飞轮单机组成1 MW飞轮阵列,在青海省西宁市风光储能基地先期开展了国内首次飞轮示范应用。期间,共开展了单日300次,连续总计2000 余次飞轮充放电测试,系统性能稳定、可靠,达到预期效果。
青海现场实验装置如图10所示,1 MW飞轮阵列由2台500 kW网侧PCS、4台250 kW机侧变流器(含飞轮FCS、FAS等)、4台飞轮本体机柜(含飞轮FMS、MCS、ADS 等)、1 台监控平台等组成。其中,每两台飞轮组成簇作直流并机,拓扑结构与图3相似。

图10 MW级飞轮阵列青海实验现场Fig.10 Experimental platform of MW flywheel array established in Qinghai
3.4 飞轮阵列频繁充放电实验测试
飞轮阵列上电后,2台PCS和4台飞轮系统同时工作,首先将每台飞轮预充电至7000 r/min左右待机,之后由飞轮稳定直流母线电压。待直流电压稳定后,由监控平台运行并网算法,并对2台PCS进行统一调度,PCS工作于PQ功率模式,为响应调度4台飞轮作频繁充放电过程。测试过程中,以飞轮簇1其中某一次实验为例(飞轮1#、2#)得到充放电曲线如图11所示。
如图11所示,飞轮1#、2#每阶段进行10次充放电循环,图中共给出了2个阶段共20次充放电循环。从图11(a)、(c)可以看出,某次充放电实验过程中,飞轮1#、2#的转速范围在7000~9000 r/min,这是FW2503飞轮最佳的充放电转速区域,根据需要可随时放开至4000~10500 r/min 范围。从图11(b)、(d)可以看出,飞轮1#、2#的充放电功率均达到-200 kW(放电)、+200 kW(充电),此时网侧PCS总的设定功率幅值即为400 kW,正功率飞轮充电加速,负功率飞轮放电减速。同时,2 台飞轮在阵列充放电过程中,各自的功率分配和转速范围基本一致,体现出较好的一致性。如此,经过2000 余次充放电实验,很好地验证了飞轮阵列的频繁充放电特性,为下一步飞轮阵列参与新能源发电一次、二次调频等任务提供保障。

图11 青海储能基地飞轮阵列充放电实验曲线Fig.11 Charge-discharge experimental curves of flywheel array system established in Qinghai
4 结 论
本文开展了飞轮储能阵列系统设计以及在风光水储能基地的示范应用。全文从工程应用出发,对飞轮阵列的系统组成、拓扑结构和参数配置等进行了介绍,并基于光伏和风力发电的模型特性提出了飞轮储能的必要性。同时,基于实际项目需求,针对FW2550和FW2503两款飞轮产品,搭建了飞轮阵列系统,并分别在天津和青海风光储能基地进行了实验测试。实验结果表明飞轮阵列性能优越,完全满足新能源调频需求,可进一步进行大规模推广应用。
猜你喜欢
汽车实用技术(2022年13期)2022-07-19
卫星电视与宽带多媒体(2022年4期)2022-05-06
无线互联科技(2021年21期)2022-01-10
舰船电子对抗(2021年1期)2021-04-15
北京青年周刊(2020年33期)2020-08-28
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
环球人物(2017年3期)2017-03-31
中国管理信息化(2016年21期)2016-12-27
中国高新技术企业(2015年27期)2015-07-30