Petri网在架空电缆无人机巡检方面的研究
2022-02-10 08:35赵厚群张坤乾缪玉婷
绥化学院学报 2022年12期
孙 霞 张 洁 赵厚群 张坤乾 缪玉婷
(安徽理工大学电气与信息工程学院 安徽淮南 232001)
随着航空工业领域的快速发展,无人机作为巡检装备之一。因其具有体积小、成本低、使用方便、技术简单成熟等特点[1-2],逐渐在电力设备巡检中得到认可。目前已使用于电力系统维护的方方面面,例如,将无人机用于输电线路的巡检[3];针对光伏电站体积较大,运维压力等问题,提出一种基于光伏电站的无人机智能巡检完整技术路线[4]。利用无人机巡检,可以及时发现缺陷,弥补传统巡检的不足,提高对电气设备的巡检质量,减轻运维人员的工作压力。Petri网作为一种优秀的系统建模和分析工具,可应用于多种场景,在处理实际问题时,可用Petri网的相应性质和行为轮廓对系统进行建模和优化。物联网技术已在各个领域中得到广泛应用,本文将物联网技术与无人机巡检相结合,提出架空电缆无人机巡检的优化模型。
一、基本概念
(一)有向网。若满足以下3个条件的三元组N=(S,T;F)就称为有向网,简称网。
①S∪T≠∅ΛS∩T=∅。
②F⊆S×T∪T×S。
③dom(F)∪ cod(F)=S∪ T。
dom(F)={x|∃y(x,y)∈ F};
cod(F)={y|∃x:(x,y)∈ F}。S和T是两个不相交的集合。其中S元素称为库所(place),T元素称为变迁(transition),F是网N的流关系(flow ralation),“×”表示笛卡尔积。Petri网规则:如果某一个变迁的所有前驱库所都有托肯,则这个变迁满足发射条件。变迁发射时,从它所有的前驱库所里分别取出1个托肯,同时往它所有的后继库所里面分别放置1个托肯,以此类推。
(二)Petri网系统。Σ=(S,T;F,K,W,M0)是Petri网系统,其中K是N上的容量函数(S元素的容量函数),W是N上的权函数(资源消耗或产生的量),应满足
①N=(S,T;F)为Σ的基网,为有向网。
②M0是容量函数K允许的标识(初始标识)。
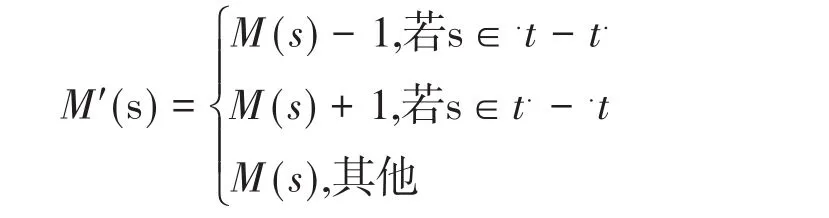
(1)若变迁t∈T,则t在M有发生权的条件是∀s=.t:M(s)≥ 1,则称t在M使能,记作M[t>1;
(2)若t在M有发生权,则t可以发生并将M改为新的表示M',记作M[t>M',则有
(三)行为轮廓。(N,M0)是一个网,初始标识M0。将所有关系的集合称为网系统的行为轮廓[5],记作BP={→,→-1,+,||}对任给的变迁(t1,t2)∈(TXT)满足下列关系:
(1)若t1>t2且t2≯t1,则称严格序关系,记作t1>→t2;
(2)若t1≯t2且t2>t1,则称严格逆序关系,记作t1→-1t2;
(3)若t1≯t2且t2≯t1,则称排他关系,记作t1+t2;
(4)若t1>t2且t2>t1,则称交叉序关系,记作t1||t2。
(四)结构性质。网系统Σ=(S,T;F,W,M0),其结构性质是由网系统的静态结构决定的,与初始标识无关,网系统的静态结构用(S,T;F,W)表示。
(1)关联矩阵:矩阵A=(Aij)为网系统Σ=(S,T;F,W,M0)的关联矩阵,A以S为行序标集,以T为列序标集,其i行j列的矩阵元素aij=W'(tj,si)-W'(si,tj)。其中W'由W扩展而来,若(x,y)∈F,则W'(x,y)=W(x,y);若(x,y)∉F,则W'(x,y)=0。
(2)状态方程M=M0+A × τT,其中,τ为任一T_向量,M0和M分别是标识的S_向量。
①若T_向量τ满足M0=M0+A×τT,则称τ为Σ的T_不变量,若τ为Σ的T_不变量,则A× τT= θST,其中,θs是分量全为0的S_向量。
②若S_向量σ满足σ ×A=θT,则σ称为Σ的S_不变量,其中θT是分量全为0的T_向量。
二、优化前架空电缆无人机巡检Petri模型
无人机巡检是目前最受关注的问题之一,本文是借助无人机通过搭载的视频设备,对架空电缆进行监测、数据采集。运维人员可以借助无人机进行人工无法实现的、危险的以及重复的架空电缆的运维工作。下面利用Petri网对架空电缆无人机巡检进行建模分析。
图1为架空电缆无人机巡检流程的Petri网模型图,图中P0库所中的token代表巡检无人机,运维人员对无人机进行检查、试飞后,无人机搭载机载设备,按照规划的飞行路线对架空电缆进行巡检。T0、T1、T2发生后,无人机对周围环境进行采集,T3和T5是排他关系,若拍摄画面显示无异常,则T3、T4发生,继续或结束巡检。若拍摄画面有异常,T5发生,T6和T9是并发关系,可同时发生。例如发现鸟窝,T6-T8发生;发现有树枝遮挡,T9-T11发生,运维人员接收到画面立刻前去清理,清理完毕后,T4发生,继续或结束巡检。架空电缆无人机巡检流程的Petri网模型各变迁符号及意义文字说明见表1。
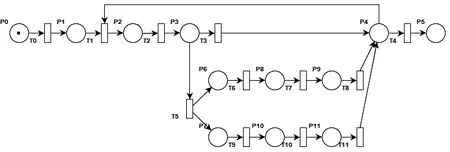
图1 优化前架空电缆无人机巡检Petri网模型
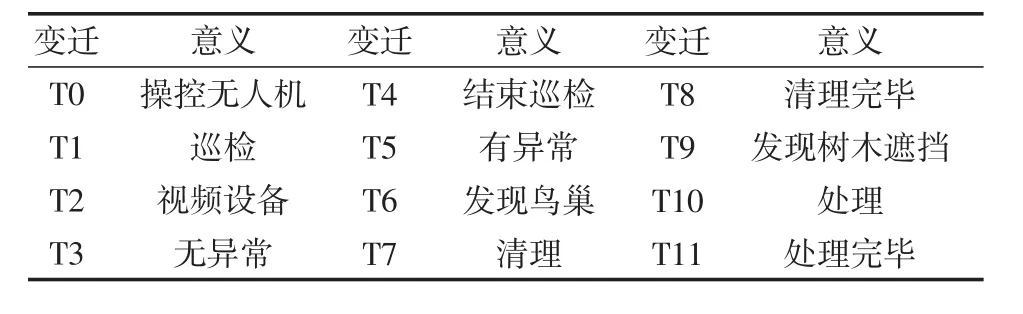
表1 优化前架空电缆无人机巡检流程的Petri网模型各变迁符号及意义文字说明
三、优化后架空电缆无人机巡检Petri模型
优化前的无人机巡检方式单一,且只能依靠设备所拍摄的画面来监测架空电缆是否出现故障等问题。相比于优化前的架空电缆无人机巡检,优化后的无人机巡检增加了红外感应设备,以实现对架空电缆的温度监测。不同于可见光的人感应,红外因其具有较强的辐射能力,可以监测到在可见光波段无法监测的特定目标[6]。该设备是由红外感应模块、微处理器模块、电源模块和LoRa通信模块组成。LoRa传输技术满足低功耗、远距离传输,信号灵敏、响应速度高且数据传输的抗干扰能力强[7-8]。整体流程为:红外感应模块对架空电缆环境数据进行采集,通过LoRa技术将数据传输至监测中心。由此对架空电缆无人机巡检进行优化,增添相关活动变迁和行为轮廓,构建成新的架空电缆无人机巡检Petri网模型。图2则是优化后的架空电缆无人机巡检的Petri网模型。
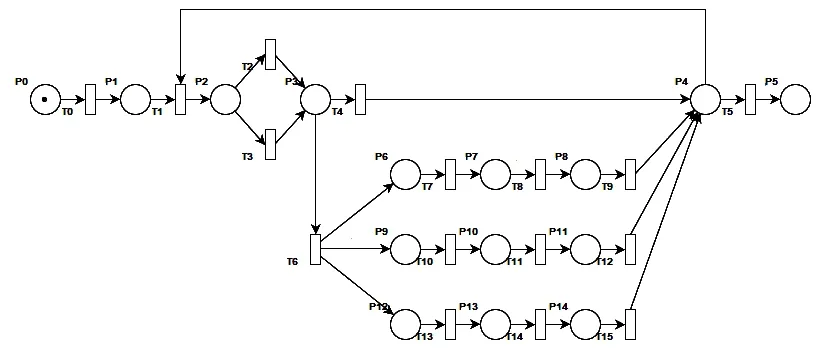
图2 优化后架空电缆无人机巡检petri网模型
图中库所P0的token代表无人机。运维人员操控无人机起飞后开始巡检,图中T2、T3是并发关系,二者同时发生,视频设备拍摄有无异常画面,红外感应设备采集数据,通过阈值对比,监测电缆是否存在异常高温可能。T4和T6是一对排他关系,无异常,T4发生,结束巡检。若存在异常,T6发生,例如若红外感应设备所监测电缆环境数值超过设定阈值,T13发生,数据通过LoRa的射频芯片进行传输处理,将数据上传至监测中心,运维人员及时锁定发生异常方位,并前往处理,T14发生,检修完毕(T15)后,继续巡检或结束巡检(T5)。优化后架空电缆无人机巡检流程的Petri网模型各变迁符号及意义文字说明见表2。
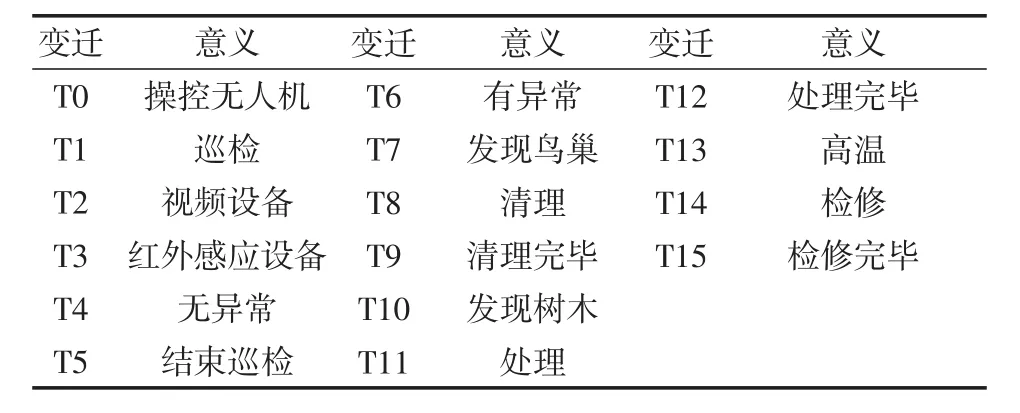
表2 优化后架空电缆无人机巡检流程Petri网模型各变迁符号及意义文字说明
四、优化后架空电缆无人机巡检Petri网性能分析与验证
(一)性质分析。Petri网的一个标识可以表示成一个m维非负整数向量。Petri网的结构也可以用一个矩阵来表示,即引入线性代数的方法对Petri网的性质进行分析[9]。通过分析其静态性质,可验证出该模型的结构稳定性。
架空电缆无人机巡检的Petri网的静态性质是由关联矩阵A、输入矩阵B、输出矩阵C表示,三者的关系式为A=B-C。矩阵中S为行标集,T为列标集。
1.输入矩阵。输入矩阵的矩阵元素用bij表示,当变迁发生时,库所中产生token,初始库所中只消耗token。
2.输出矩阵。输出矩阵的矩阵元素用cij表示,当变迁发生时,会消耗token,架空电缆无人机巡检的Petri网的输出矩阵C如下所示。

3.关联矩阵。是对网系统的结构描述,与初始标识无关。关联矩阵的矩阵元素用aij表示,aij是变迁tj发生一次对si所含token数量的改变,发生变迁时,会产生或是消耗token,产生用正数,消耗用负数表示。行对应着库所与相应变迁集间的关系,列对应着变迁与相应库所集间的关系。架空电缆无人机巡检的Petri网的关联矩阵A如下所示。

根据架空电缆无人机巡检的Petri网模型的关联矩阵,由公式ATX=θT与AY=θS的可得出通解X和Y,即S_不变量和T_不变量,由后者可解出矩阵的通解YT为:
YT=(0 0-1 1 0 0 0 0 0 0 0 0 0 0 0 0)。
由矩阵的通解可知,分量1代表token从库所流至变迁,分量-1代表token从变迁流至库所。变迁发生不会改变库所中的token数,故架空电缆无人机巡检的Petri网模型的流通路径是固定的。因此,该检测方式的Petri网结构是静态稳定的、可达的。
(二)仿真实验验证。为检验优化后的架空电缆无人机巡检Petri网模型的正确性与可达性,在Petri网分析软件PIPE中绘制模型图,利用State Space Analysis函数,对优化后的模型进行验证。运行结果图如图3所示。结果表明,优化后的模型是可达的。

图3 PIPE模型仿真检验图
五、结语
通过对传统架空电缆无人机巡检Petri网模型的分析,在此基础上,增加红外感应设备,应用物联网技术对电缆环境数据进行无线传输,建模优化架空电缆无人机巡检方式,对其Petri网的静态结构分析可达性与准确性,并在PIPE软件中得到验证。优化后的架空电缆无人机巡检方式,可减轻运维人员的工作强度,能够使得运维人员能够快速地发现故障点并及时检修或处理。
猜你喜欢
贵州师范学院学报(2022年12期)2023-01-16
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
实验室研究与探索(2020年11期)2020-12-11
中国粮食经济(2018年12期)2018-12-30
中国粮食经济(2018年10期)2018-12-30
中国粮食经济(2018年11期)2018-12-27
山东工业技术(2018年20期)2018-11-26
物流科技(2017年10期)2017-11-22
人大建设(2017年6期)2017-09-26
天津科技大学学报(2014年4期)2014-02-27