
基于低通滤波的大功率型氢燃料电池重型货车自适应能量管理策略*
2021-12-11 13:28:02张瑞亮刘森海范政武
汽车工程 2021年11期
张瑞亮,陈 准,刘森海,范政武
(1.太原理工大学车辆工程系,太原030024;2.山西省汽车设计工程技术研究中心,太原030024;3.江铃重型汽车有限公司,太原030032)
前言
氢燃料电池汽车具有清洁高效、燃料来源多样和续驶里程长等优势[1],对于大负载、远距离行驶、汽车体积较大的重型货车,氢燃料电池更是公认的优选方案,更能发挥氢燃料的能源优势[2]。但氢燃料电池存在功率输出动态响应较慢和启动时间长的缺点,无法单独应对复杂多变的行驶工况[3-4],目前氢燃料电池汽车通常采用氢燃料电池与辅助能量源共同为驱动电机供电的动力系统结构,即一种电-电混合动力系统结构[5]。
由于使用多种能量源,氢燃料电池汽车需要合理有效的能量管理策略对整车需求功率进行分配管理,根据各能量源特性及当前状态协调其功率输出,并在满足整车动力性的同时,尽可能提高整车燃料经济性和各能量源的耐久性[6]。文献[7]中使用基于功率平衡的能量管理策略,根据当前车辆的需求功率、蓄电池荷电状态、车速、踏板信号和动力源输出,选择工作模式,并在不同工作模式下合理分配两个动力源的输出功率,以满足功率平衡。文献[8]中提出一种基于微小变量模糊逻辑的燃料电池混合动力汽车能量管理策略,利用需求功率和动力电池SOC确定能量的分配,在满足车辆行驶工况动力性条件下维持低SOC微变增加,从而提高了整车效率,降低了氢耗量。文献[9]中制定了一种等效最小消耗策略,将不同能量源的能耗转化为等效氢耗,通过等效氢耗最小的原则来确定燃料电池系统和其他能量源的工作点,文献[10]中提出了基于庞特里亚金极小值原理的控制策略,将目标设为行驶时整车氢耗最小,确定了燃料电池公交车行驶路线中的功率分配。
氢燃料电池在稳态工况下具有较长的使用寿命,而频繁变载会导致氢燃料电池耐久性的下降[11]。在目前的氢燃料电池汽车能量管理策略研究中,对于如何提高整车燃料经济性的关注较多,较少考虑氢燃料电池系统频繁变载对其耐久性的影响。本文中以大功率型氢燃料电池重型货车为研究对象,首先对其混合动力系统进行分析,确定了氢燃料电池和动力电池的适宜工作区间,结合典型工况下整车需求功率的频域特性,提出了一种基于低通滤波的自适应能量管理策略,利用Matlab/Simulink搭建大功率型氢燃料电池重型货车整车仿真模型并进行仿真分析,为了充分发挥自适应低通滤波器的作用,最后采用Pareto遗传算法对自适应低通滤波器进行了多目标优化。仿真结果表明,相较于传统的功率跟随能量管理策略,提出的能量管理策略能够在保证整车动力性和燃料经济性的同时,有效降低氢燃料电池系统输出功率波动,通过优化可使输出功率波动度进一步降低9.28%,从而有利于延长氢燃料电池使用寿命。
1 大功率型氢燃料电池重型货车动力系统
1.1 大功率型氢燃料电池重型货车混合动力系统
本文研究的大功率型氢燃料电池重型货车以氢燃料电池为主能量源,以动力电池作为辅助能量源,系统结构如图1所示。在动力系统中增加动力电池会加大整车的成本和质量,并且增大了控制的难度,但是动力电池能够弥补氢燃料电池动态响应慢的缺点,通过合理的能量管理,可以使氢燃料电池与动力电池灵活配合,使氢燃料电池稳定工作在高效率区域。当车辆加速、爬坡时,由动力电池提供瞬时功率;当车辆减速制动时,动力电池可回收制动能量;当氢气不足或者氢燃料电池损坏时,车辆也可以纯电动模式行驶。整车主要参数如表1所示。

图1 大功率型氢燃料电池+动力电池混合动力系统

表1 整车主要参数
1.2 大功率型氢燃料电池
大功率型氢燃料电池重型货车采用最大输出功率95 kW的质子交换膜燃料电池系统,其以氢燃料电池堆为核心,还包括氢气供给系统、空气供给系统、冷却系统和控制系统等,各个系统协调工作,保证氢燃料电池能够安全、稳定地发电[12]。氢燃料电池系统的工作效率与其输出功率之间的关系如图2所示。

图2 氢燃料电池功率-效率曲线
由图可知,随着功率的升高,氢燃料电池系统效率先迅速上升至较平稳区域,然后缓慢下降。为保证氢燃料电池系统工作效率,须对其高效工作区间进行划分,设定氢燃料电池高效工作区间最小工作功率Pfcmin=30 kW,最大工作功率Pfcmax=80 kW,同时设定30~68 kW为效率最高的工作区间,此时系统工作效率达到46%以上,设Pfceff=68 kW。汽车行驶时,应保证氢燃料电池工作在Pfcmin和Pfcmax之间,并且尽量工作在效率最高区域。
频繁变化的功率会对氢燃料电池造成冲击,容易使氢燃料电池出现反应气体不足、电压波动等问题,最终导致氢燃料电池性能的衰退和耐久性的下降,因此需要避免氢燃料电池的频繁变载。
1.3 动力电池
动力电池采用能量、功率密度高、工作安全可靠、自放电率较低、使用寿命长的磷酸铁锂电池[13],其单体电池电压特性曲线如图3所示。

图3 单体电池电压特性曲线
动力电池电压随其SOC的增大而增大。当SOC过高或过低时,会导致动力电池电压过高或过低,进而影响电池性能,甚至直接损坏动力电池。为了实现动力电池的浅充浅放,提高其使用寿命,本文中设定动力电池SOCmin=0.4,SOCmax=0.7,设期望值SOC*为两者的均值,即SOC*=0.55。汽车行驶时,应使动力电池SOC最好保持在SOCmin到SOCmax之间,并且尽可能维持在SOC*附近。
2 大功率型氢燃料电池重型货车典型工况
2.1 CHTC-TT工况
本文研究的车型为氢燃料电池半挂牵引车,根据GB/T 38146.2—2019,适用的循环工况为中国重型商用车行驶工况-半挂牵引列车(CHTC-TT)。图4为CHTC-TT工况曲线,包括低速和高速两个速度区间,其工况时长1 800 s,总里程达到23.22 km,最高车速为88 km/h。
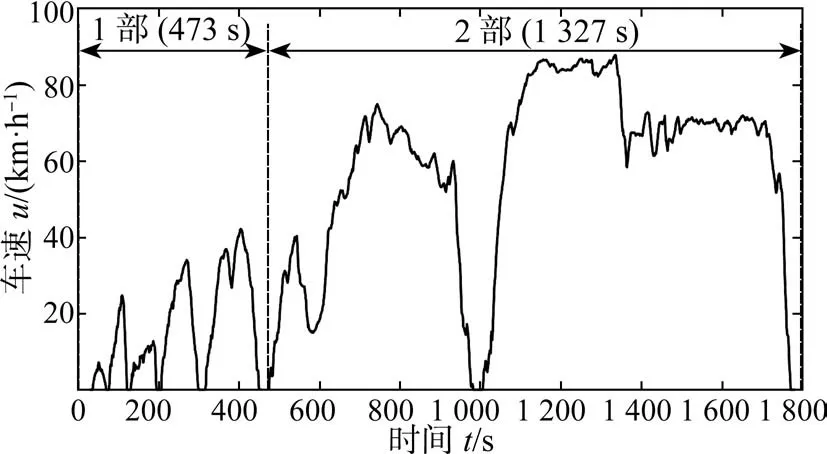
图4 CHTC-TT工况曲线
2.2 整车需求功率分析
2.2.1 整车需求功率时域分析
利用汽车功率平衡方程,计算汽车在CHTC-TT工况下行驶时的整车需求功率Pre变化情况,汽车功率平衡方程为

式中:u为当前车速;m为整车满载质量;f为滚动阻力系数;Cd为空气阻力系数;A为车辆迎风面积;δ为旋转质量换算系数,取δ=1.12;ηt为传动系机械效率;g为重力加速度。经计算获得整车需求功率Pre时域变化情况如图5所示。Pre>0时,整车处于驱动状态,Pre为电机输出功率;Pre<0时,整车处于制动状态,Pre为机械制动消耗和电机制动回收的总功率。

图5 整车需求功率时域图
2.2.2 整车需求功率频域分析
在大功率型氢燃料电池重型货车动力系统中,氢燃料电池系统无法回收制动能量,其输出功率Pfc≥0。为了使燃料电池系统平稳工作,充分利用动力电池提供瞬时功率起到“削峰填谷”的作用,本文中利用快速傅里叶变换对整车需求功率Pre≥0部分进行频域分析,其中采样频率为100 Hz,采样周期为0.01 s,采样点个数为180 001,求得整车需求功率在0~50 Hz范围内的频域特性。由于整车需求功率的主要工作频率和频带范围较小,本文中选取0~0.5 Hz范围的频域特性曲线进行展示,如图6所示。

图6 整车需求功率频域特性图(0~0.5 Hz)
由频域分析结果可知,大功率型氢燃料电池重型货车在CHTC-TT工况下行驶时,其整车需求功率在0~0.1 Hz的低频部分幅值相对较大,这与行驶工况和需求功率时域特性相一致,即在整个行驶工况与需要功率时域分布中,车速与需求功率在短时间存在一定的直流分量,与此同时围绕该分量存在一定的速度与功率波动,由此可见,傅里叶变换结果能够反映整车需求功率的变化与分布。此外,由式(1)可知,车辆在运行中满足功率平衡公式,整车需求功率与运动中阻力消耗的功率相等,在行驶中取车辆滚动阻力为定值;空气阻力与车速为平方关系,其频率较低;而加速阻力与汽车加速度成正比,其变化频率较高。这样,可使用低通滤波器对整车需求功率进行分频滤波,高、低频率部分需求功率分别由动力电池和氢燃料电池承担。
3 基于低通滤波的自适应能量管理策略
本文中制定了一种基于低通滤波的自适应能量管理策略,在传统功率跟随能量管理策略的基础上增加了自适应低通滤波器(adaptive low pass filter,ALPF)。
自适应低通滤波器根据车辆当前的状态自适应调整低通滤波器的截止频率,并利用低通滤波器的滤波功能,以截止频率为界,将整车需求功率Pre划分为低频部分和高频部分,低频部分功率经过逻辑规则调整后,由氢燃料电池提供,高频部分功率则由动力电池提供。自适应低通滤波器主要由低通滤波器和模糊控制器组成,图7为其工作示意图。

图7 自适应低通滤波器工作示意图
3.1 低通滤波器
低通滤波器容许低于截止频率的信号通过,阻隔高于截止频率的信号。1阶低通滤波器的传递函数为

式中:T为时间常数;fc为截止频率。输入信号一定时,截止频率fc越小,低通滤波器容许通过的信号越少,对波动的抑制效果越好;fc越大,低通滤波器容许通过的信号越多,波动越大。
如果使用截止频率固定的滤波器,则需要预先设置低通滤波器的截止频率fc。设置过高时,低通滤波器不能很好地起到滤波的作用,氢燃料电池需求功率波动较大;设置过低时,会增加对于动力电池的功率要求,不能充分利用大功率型氢燃料电池,其工作效率较低。
因此,在复杂多变的实际行驶中,截止频率固定的滤波器可能无法实现最佳的功率分配。本文中采用截止频率可调的低通滤波器,在整车运行过程中,利用模糊控制器对其截止频率fc进行在线调整。
3.2 模糊控制器
模糊控制器非常适用于非线性、时变等过程复杂的系统,并且能获得较好的控制效果。本文中选取动力电池荷电状态SOC和整车需求功率Pre作为两个输入变量,以低通滤波器截止频率fc作为输出变量,设计了双输入-单输出的模糊控制器对低通滤波器截止频率进行自适应调整。
首先确定各个变量的基本论域,将动力电池SOC的基本论域设为[0,1];根据驱动电机参数,将整车需求功率Pre的基本论域设为[0,250];为保证低通滤波器较好地抑制需求功率的波动,将低通滤波器截止频率fc的基本论域设为[0,0.1],再将3个变量分别划分为甚低、低、中、高、甚高5个模糊子集,并使用{VL、L、M、H、VH}来表示,各变量隶属度函数均采用三角形、梯形两种类型组合的形式。图8~图10分别为动力电池SOC、整车需求功率Pre和截止频率fc的隶属度函数。

图8 动力电池SOC隶属度函数

图9 整车需求功率Pre隶属度函数

图10 截止频率fc隶属度函数
当动力电池SOC较低、整车需求功率Pre较大时,模糊控制器应输出较大的截止频率fc,使氢燃料电池承担更大的功率输出,保证整车的动力性;而当动力电池SOC较高、整车需求功率Pre较小时,模糊控制器输出较小的截止频率fc,使氢燃料电池需求功率波动更小,从而有利于提高其耐久性。表2为制定的模糊控制规则。

表2 模糊规则表
3.3 逻辑规则
逻辑规则由滤波前后需求功率Pre与Pref和动力电池SOC共同控制能量分配。大功率型氢燃料电池重型货车动力系统主要包括3种工作模式。
(1)动力电池单独工作模式
起步时,由于氢燃料电池的启动需要预热,由动力电池单独供电。当氢燃料电池到达启动温度时,氢燃料电池系统是否启动,由动力电池SOC和需求功率Pref来决定。
当动力电池SOC>SOCmax,且需求功率Pref<Pfcmin时,氢燃料电池系统可以关闭,直到SOC≤SOCmin时,氢燃料电池系统重新启动。在此模式下,动力电池输出功率Pb=Pre。
(2)氢燃料电池单独工作模式
当SOC<SOCmin时,若Pref<Pfcmax,氢燃料电池单独工作,承担整车功率需求,同时为动力电池充入电能,使其SOC趋向于SOC*。在此模式下,动力电池和氢燃料电池功率为

式中Pch为动力电池充电基数。此时Pb<0,代表动力电池正在充电,其充电功率根据式(3)和当前SOC进行计算。
(3)氢燃料电池与动力电池混合工作模式
当SOCmax>SOC>SOC*时,氢燃料电池与动力电池共同为整车提供能量,在此模式下,动力电池及氢燃料电池功率为

式中Pdis为动力电池放电基数,将充放电基数均设为100 kW,即Pch=Pdis=100 kW。此时Pb>0,代表动力电池正在放电,其放电功率根据式(6)和当前SOC进行计算。
而当SOC≤SOC*,但Pref>Pfcmax时,氢燃料电池无法单独驱动,此时动力电池提供不足部分功率,此时动力电池及氢燃料电池功率为

此外,当汽车制动时,设氢燃料电池系统输出功率为Pfcmin,如果此时动力电池SOC≤SOCmax,则由动力电池回收电机产生的制动能量。
4 建模与仿真
4.1 仿真模型
根据动力系统各部件实测数据结合相关公式,在Matlab/Simulink软件中搭建大功率型氢燃料电池重型货车整车仿真模型,主要包括驾驶员模块、整车控制策略模块、驱动电机模块、燃料电池模块、动力电池模块和整车动力学模块等部分,如图11所示。

图11 大功率型氢燃料电池重型货车整车仿真模型
4.2 仿真结果与分析
在CHTC-TT工况下进行仿真,将动力电池荷电状态设置在较为适宜的工作区间,取动力电池SOC0=0.55,并对基于低通滤波的自适应能量管理策略和传统功率跟随策略的仿真结果进行对比分析。图12为车速跟随情况。
由图12可知,采用两种能量管理策略时,其车速变化情况基本一致,并且都能较为准确地跟随CHTC-TT工况下的目标车速,整车动力性满足工况要求。

图12 车速跟随情况
图13 为两种能量管理策略下氢燃料电池系统输出功率的变化情况。

图13 氢燃料电池系统输出功率情况
由图13可知,采用两种能量管理策略时,氢燃料电池系统输出功率变化趋势基本相同,并且都能保证氢燃料电池系统工作在较高效率区间。在汽车起动前期,车速较低,同时动力电池电量比较充足,此时氢燃料电池处在关闭状态。随着车速的提高和动力电池电量的下降,氢燃料电池启用,和动力电池同时供电。当整车需求功率较低时,氢燃料电池还为动力电池充电。
将动力电池荷电状态控制在合理范围也是能量管理策略的重要功能,图14为两种能量管理策略下,动力电池SOC变化情况的对比。

图14 动力电池SOC变化情况
由图14可知,两种能量管理策略下动力电池SOC变化情况基本相同,并且始终保持在适宜范围。采用功率跟随能量管理策略和基于低通滤波的自适应能量管理策略,动力电池SOC分别变化了0.098 7和0.099 2,其变化量相差不大。
采用两种能量管理策略,其氢耗量如表3所示,表中等效氢耗为动力电池等效氢耗量与氢燃料电池氢耗量之和。

表3 大功率型氢燃料电池重型货车氢耗情况
由表可知,采用基于低通滤波的自适应能量管理策略时,大功率型氢燃料电池重型货车百公里氢耗量较低,但整车百公里等效氢耗量略高于功率跟随控制策略,其主要原因是自适应滤波器对整车需求功率进行了滤波,由动力电池承担高频部分功率,增大了动力电池的输出功率,进而使其等效氢耗量有所增加。
变化率能够反映数据的变化快慢,为量化分析氢燃料电池系统输出功率波动程度,本文中从功率变化率的角度出发,定义氢燃料电池系统输出功率波动度V为

式中:Pi+1和Pi分别为i+1和i时刻的氢燃料电池系统输出功率采样值;T表示采样周期,取T=1 s;N为采样点数目,取N=1801。波动度数值越大,氢燃料电池系统功率的平稳性越差,氢燃料电池系统功率波动越大,反之,其数值越小,氢燃料电池系统功率的波动越小。图15为两种能量管理策略下,氢燃料电池系统输出功率波动度变化情况的对比。

图15 氢燃料电池系统输出功率波动度对比
由图可知,基于低通滤波的自适应能量管理策略下氢燃料电池输出功率的波动度始终小于功率跟随策略,在CHTC-TT工况结束时,其波动度分别为1.226 2和1.981 5。由以上分析可知,采用基于低通滤波的自适应能量管理策略时,氢燃料电池系统输出功率波动较小,其平稳性较好,在CHTC-TT工况下,其波动度降低了38.12%。
通过以上对比分析可知,基于低通滤波的自适应能量管理策略整车燃料经济性与功率跟随策略基本持平,但是有效地降低了氢燃料电池系统输出功率的波动,减小了对于氢燃料电池的冲击,有利于提高氢燃料电池的耐久性。
5 能量管理策略优化
模糊控制器的设置具有一定的主观性和盲目性,为了更加充分发挥自适应低通滤波器的作用,本文中对其进行多目标优化,以整车百公里氢耗和氢燃料电池系统波动度最小作为优化目标,以模糊控制器3个变量隶属度函数的横坐标作为优化变量。
通过多目标优化,获得30组非劣解组成的Pareto前沿,如图16所示。

图16 Pareto前沿
由图可知,非劣解的分布呈现出凹曲线的形状,当整车百公里等效氢耗较低时,其微小的下降会使燃料电池系统输出功率波动度明显升高,反之亦然,为使两者同时达到较低值,本文中选择O点作为最终的优化方案。
经过优化后,模糊控制器中截止频率fc、动力电池SOC和整车需求功率Pre的隶属度函数如图17所示。

图17 优化后各变量隶属度函数
将优化后的变量导入自适应低通滤波器,在CHTC-TT工况下进行仿真,并对比优化前后燃料电池系统输出功率及其波动度。图18为优化前后的燃料电池系统输出功率对比。
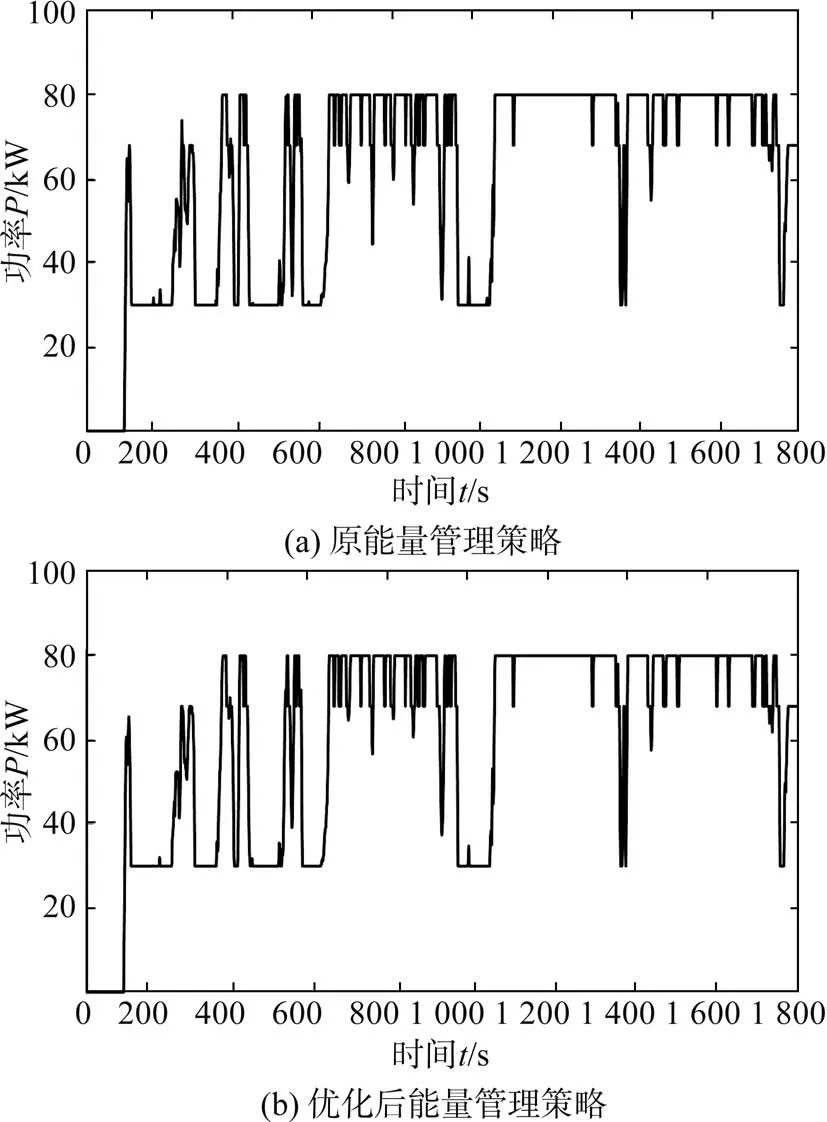
图18 燃料电池系统输出功率对比
由图可知,优化前后燃料电池系统输出功率的变化趋势基本一致,并且都能保证燃料电池系统工作在较高效区域,图19为优化前后燃料电池系统输出功率波动度的对比。

图19 优化前后燃料电池系统输出功率波动度对比
由图可知,优化后燃料电池系统输出功率波动度变化更慢,数值更低,因此燃料电池系统输出功率波动更小,平稳性更好,对燃料电池系统的耐久性更有利。
在CHTC-TT工况结束时,自适应低通滤波器优化前后氢燃料电池重型货车整车氢耗情况和燃料电池系统输出功率波动度如表4所示。
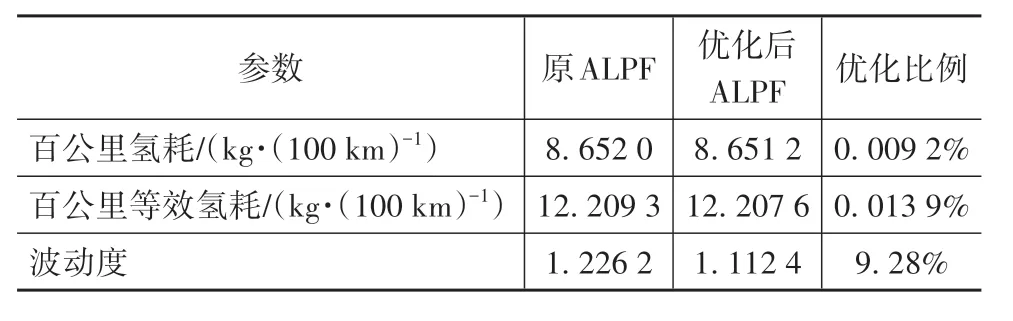
表4 自适应低通滤波器优化前后对比
由表可知,优化后的基于低通滤波的自适应能量管理策略能够在不增加整车氢耗的前提下,进一步减小燃料电池系统输出功率波动度,其优化比例达到了9.28%。
6 结论
本文中以大功率型氢燃料电池重型货车为研究对象,通过分析其混合动力系统,确定了氢燃料电池和动力电池的适宜工作区间,结合其典型工况下整车需求功率的频域特性,提出了一种基于低通滤波的自适应能量管理策略,并在Matlab/Simulink中搭建大功率型氢燃料电池重型货车整车仿真模型,对其进行仿真验证,仿真结果表明所提出的能量管理策略能够在保证大功率型氢燃料电池重型货车动力性和燃料经济性的同时,有效地降低氢燃料电池系统输出功率的波动,在CHTC-TT工况下的波动度降低了38.12%。为了更充分发挥自适应低通滤波器的作用,最后对自适应低通滤波器进行了多目标优化,优化后在保持整车氢耗水平的前提下,使燃料电池系统输出功率波动度进一步降低9.28%。本文为大功率型氢燃料电池重型货车能量管理策略的开发和应用提供了一定的参考。
猜你喜欢
激光与红外(2023年8期)2023-09-22 09:01:10
无损检测(2022年6期)2022-07-05 08:54:36
重庆理工大学学报(自然科学)(2019年6期)2019-07-16 12:29:40
电气电子教学学报(2018年3期)2018-10-11 03:19:20
机电信息(2018年6期)2018-03-05 03:44:16
浙江大学学报(工学版)(2016年4期)2016-12-22 00:37:43
电测与仪表(2015年21期)2015-04-09 11:52:16
电测与仪表(2015年8期)2015-04-09 11:49:50
电测与仪表(2015年11期)2015-04-09 11:46:14
燕山大学学报(2014年2期)2014-03-11 15:28:26
