
新型变径管道机器人的设计
2021-11-25 09:08:26常生刘玉良王忠超
机械工程师 2021年11期
常生,刘玉良,王忠超
(浙江海洋大学 海洋工程装备学院,浙江 舟山 316000)
0 引言
油气管道在各国的能源传输方面起着重要的作用[1-2],尤其是我国有着复杂的油气管网,随着油气管道的使用时间变长,地底环境潮湿和地震等自然灾害会造成油气管道的腐蚀、裂纹和断裂[3],经常会出现油气泄漏污染环境和安全的问题。为了防止发生油气泄漏,造成安全事故,就需要定期地对油气管道进行安全检测。如果采用人工挖开进行检测,不仅检测效率低,而且成本高[4-5]。目前市面上存在的固定半径的管道检测机器人,只适应同一管径的管网检测,对于不同管径的管网却无能为力。变径油气管道检测机器人就可以自由过渡不同管径,可以一次性检测不同管径管网,提高了操作的灵活性和检测效率[6-7]。为了能够使管道机器人适应不同的管径,国内的管道机器人研究者设计了不同结构的变径管道机器人,例如:石家庄铁道大学的张保真等[8]针对管道机器人对管道半径的适应性,基于升降机式与滚珠丝杠螺母副式变径机构,提出了一种滚珠丝杠螺母副三角升降式变径机构;上海交通大学的马嘉翊[9]研发了一种运动机构,采用周向三轮定位全驱机构和双丝杆曲柄滑块叉式主动变径机构相结合,通过对称式设计实现管道内行走及变径。
为了更好地实现油气管道检测机器人的变径,本文设计了一种新型变径机构,可以灵活地实现机器人的变径,以适应不同工况下检测作业。
1 机器人的整体设计
1.1 机器人的设计原则
1)根据现有的变径管道检测机器人,设计一种新型连杆结构的管道机器人的变径机构;2)采用履带式行走机构,增大机器人的驱动性能和运动稳定性,便于机器人在油气管道内稳定地作业;3)采用传统的同轴、不同向的齿轮传动结构,带动连杆结构实现变径;4)节约成本,在实现管道机器人的各种功能的前提下,尽可能使机器人的体积小,结构紧凑。
1.2 机器人工作原理
机器人在水平管道中运行时,履带行走机构的橡胶履带与管道内壁接触,管道内壁与橡胶履带的摩擦力为机器人提供动力。水平管中运行的机器人,两侧履带行走装置不需要张开太大角度,只需要履带与管道内壁接触,就可以满足机器人的正常行走。机器人在竖直管道内运行时,可以控制变径机构收放以适应管道内不同管径的变化,保持变径管道机器人本体中心线与油气管道的中心轴线保持平行。就需要机器人的履带行走机构张开180°以抵在油气管道内壁。机器人内部的同轴、不同向的齿轮传动结构工作,电动机正转,分布在机器人本体上的圆环随着齿轮转动,左右两边的圆环转向相反,带着履带固定架向上和向外运动,一方面,抬高了履带行走机构,使其与管道直径平行;另一方面,扩展了机器人的伸展宽度。使橡胶履带紧紧地抵在管道内壁,防止机器人滑落,为机器人向上运动提供足够的摩擦力。
1.3 机器人的整体组成结构
如图1所示,通过三维制图软件SolidWorks建模零件和装配变径管道机器人的三维模型,主要包括机器人主体、圆环、连接架、履带固定架、履带行走机构等。

图1 变径管道机器人的整体组成结构
2 变径管道机器人关键结构的设计
2.1 履带式行走机构
与传统的履带式行走机构不同,该履带式行走机构没有直接与机器人本体相连接,而是通过履带固定结构与本体间接相连,一方面是机器人变径结构的一部分,另一方面是管道机器人的行走机构。使得管道机器人在运动的过程中实现轻松变径,让机器人的变径与行走变得更加灵活。
履带式行走机构中的履带采用橡胶履带,由于材质的原因,在机器人行走过程中,橡胶履带会产生比金属履带更大的摩擦力,特别是管道机器人运行在有一定倾角或者竖直管道内时,橡胶材质的履带的摩擦效果会更显著。履带式行走机构与油气管道壁面的接触面积大,可以为机器人的运动提供足够的摩擦力,增加机器人的负载能力。但履带的整体结构比较笨重,需要的转弯半径大,故在制作过程中要采用轻质材料组装履带式行走机构。履带式行走机构如图2所示。
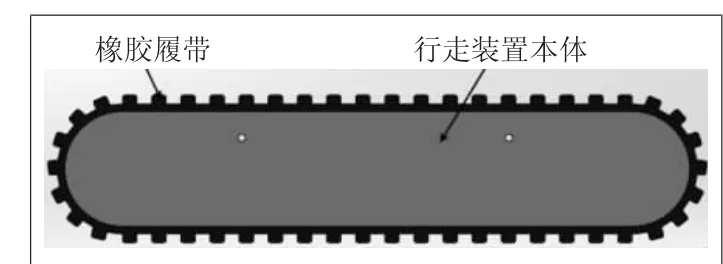
图2 履带式行走机构
2.2 管道机器人变径系统
机器人的整个变径系统如图3所示,包括机器人的变径结构和变径驱动结构。机器人的变径机构采用了传统的连杆机构,机器人主体上有4个带有齿轮的圆环,这4个圆环是实现变径的主要零件,可将4个圆环理解为连杆机构的一部分。通过销将圆环、连接架和履带行走机构的固定架联接起来。履带式行走机构与履带行走机构固定架类似于另一个连杆。前后各有2个这种连杆机构,在同轴不同向的齿轮传动结构的带动下实现变径。前后2个连杆机构分别与1个齿轮传动结构相连。在电动机的带动下,齿轮结构产生不同方向的转动,带动左右4个圆环同时向上或向下运动,上面2个圆环的上下摆动主要是用于调节履带行走机构的高度,下面2个圆环的上下摆动主要是用于调节履带行走机构的角度,便于增大履带与油气管道内壁的接触面积。
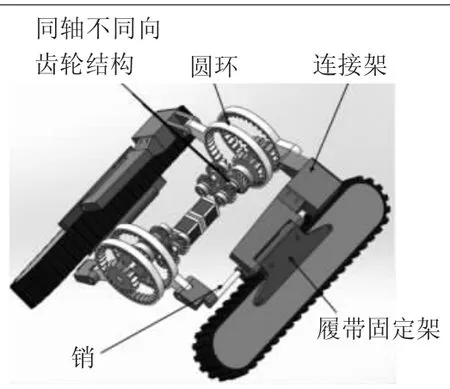
图3 机器人的变径系统
3 管道机器人的整体装配
在对新型变径管道机器人的设计过程中,采用的是以本体为中心向周围扩散的装配方法,首先要对变径机器人的各种机械零件和装配结构进行分析。使用SolidWorks 三维建模软件完成机器人全部零件的设计和建模,并通过对各个零件进行合理的配合,组装成整体机器人的装配体,如图4所示。
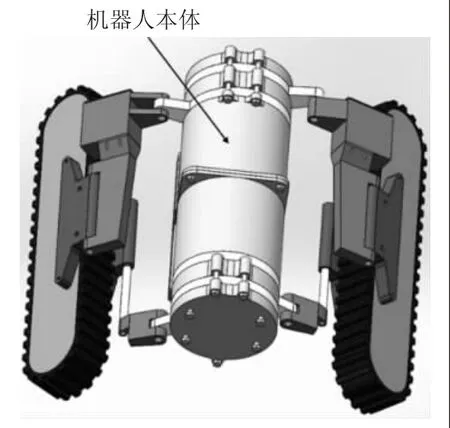
图4 变径管道机器人的整体装配
4 结论
油气管道是我国主要的能源输送方式之一,油气管道的好坏直接决定了油气运输的效率。油气管道检测变径机器人的设计和研发决定了油气管道的检测质量。现在市面上少有用于管道内变径的机器人,因此设计一种能适应不同管径的管道机器人是一种必要的途径。对于变径管道机器人,主要有以下几个方面的研究:1)主要针对能够适应油气变径管道复杂情况的变径管道机器人进行研究,设计了一种新型变径结构,可以适应直径范围为300~350 mm的油气管道;2)一种新型的连杆结构的机器人变径结构,连杆结构变径灵活,能够完成一定范围的变径,并保证机器人的履带机构能够很好地接触到油气管道内壁;3)传统的机械齿轮结构,该结构可以实现同轴不同向的转动,设计灵活,并在一定程度上节省了空间,减少了机器人的制造成本;4)改造的履带式行走机构,兼顾管道机器人的变径和行走功能,橡胶式履带可以增大与油气管的接触面积,增大摩擦力,提高驱动能力和负载能力;5)采用三维建模软件SolidWorks对机器人的各个零件进行设计、建模和装配,直观地体现出变径管道机器人的整体情况,为搭建实物提供了依据。虽然本文设计的是针对油气管道的变径机器人,但是经过适当的改进,该机器人在其他类似的工程管道中也具有很好的实用性。
猜你喜欢
矿冶工程(2023年6期)2024-01-20 10:21:38
选煤技术(2023年2期)2023-08-09 05:56:48
中学生数理化·八年级物理人教版(2023年4期)2023-05-05 07:29:32
农业装备与车辆工程(2021年8期)2021-08-28 09:49:16
中国石油石化(2021年8期)2021-03-30 12:39:14
南方农机(2021年1期)2021-01-20 11:41:46
装备制造技术(2020年1期)2020-12-25 05:18:30
港口装卸(2020年3期)2020-06-30 10:37:54
石油化工建设(2019年6期)2020-01-16 08:03:42
重庆理工大学学报(自然科学)(2017年8期)2017-09-12 06:35:12
