基于无人测试船水面路径规划策略∗
2021-11-11 14:23石钊铭
舰船电子工程 2021年10期
石钊铭
(武汉市江夏区藏龙大道709号 武汉 430205)
1 引言
随着科学技术的高速发展,各种机器人越来越多地应用到人们的日常生活中,从事着与人们日常生活息息相关的服务工作,改善和提高了人们的生活质量[1]。无人水面艇作为集多传感器综合于一体的科技产品,在诸如测绘、军事演习等各行各业扮演着主要的角色。
机器人在封闭环境中的全覆盖路径规划一直是较为热门的话题,而应用场景也较为丰富,例如扫地机器人的全覆盖清扫路径,无人机的农药喷洒路径,国内外有众多学者对此展开了大量的研究,贺嘉等在《基于贪心蚁群算法的无人水面艇全局路径规划》提出了双向搜索法优化传统贪心算法,使得迭代时间和次数减少,并取得了较好的路径规划结果[2]。简毅等在《一种室内扫地机器人全遍历路径规划方法研究》中,提出了先学习子区域,然后由边缘向中靠拢的路径规划算法[3]。
本文首先对水面进行栅格化,然后采用旅行商算法进行全覆盖式路径规划,根据路径规划发布的路径点来动态的优化运动轨迹,采取了转角与直行同步的策略。提高了无人测试船的巡航效率,避免规划路径中锐角调整时间过长的现象,减少过多减速以及转折的次数,保证了无人测试船运动位姿的美观性。最后在ROS操作系统下,利用系统工具快速搭建实验平台,以便于测试算法的可行性。
本文算法流程如图1所示。

图1 算法流程
2 覆盖式路径规划算法
在进行覆盖式路径规划之前,本文首先运用占据栅格地图(Occupancy Grid Map)法[4]对已知水域进行建模。栅格法建模,是采用一系列同样大小的栅格对水域进行建模的方法。在栅格地图中,白色方块代表水域中的可行区域,黑色方块代表水域中的不可行区域,例如边界或者水中高地,需要绕开进行路径规划。
根据切片法进行细胞单元划分,如图2所示地图区域划分为共7个细胞区域,然后对于每个单元格有两种出入方式。则对于若干个子细胞而言,全覆盖路径规划是旅行商问题[5]。个体基因由数字1~N的排列组成,本文将个体基因确定为4N个细胞路径组合。单元id和出入点通过4N的模进行解码,基因之间不可重复。
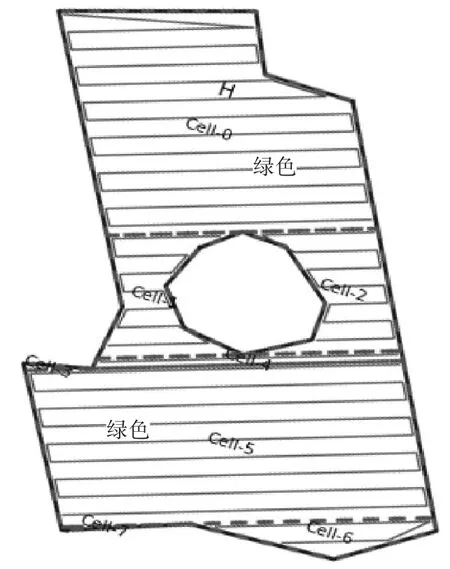
图2 切片划分子细胞示意图
遗传根据适应度函数对群体进行遗传更新,本文采用如下适应度函数:

其中ωdist与ωtime分别代表总流程与总时间的权值。
根据遗传算法模型,本文采用全覆盖路径规划算法描述如下。
1)首先建立解码和编码的数学模型,采用洗牌算法随机打乱细胞排列进行初始化,然后随机选择一个细胞的入口和出口点;
2)依据初始种群计算最优路径,指定当前最优解为初始解;
3)随机选择两个细胞作为父母细胞,利用交叉算子[6]产生后代,当子代数目与初始数目相同时停止交叉,交叉后根据变异概率进行变异,并将子代变异前后交换位置;
4)对于步骤3)的子代,将规定突变概率最为交换规则,随机变换细胞的进入和退出点,然后找到每个细胞的最佳进入退出点;
5)用步骤4)的后代取代初始种群,计算更新后的种群单体的路径总长度,如果更新后的总长度比更新前的总长度短,则更新计算结果;
6)将步骤3)~5)进行迭代,直到进化与分配后代数目相同为止,得到遗传算法的最优解。
3 基于动态圆的路径优化
无人测试船在水面的运动模型解析为角速度和线速度,可无人测试船在水面的运动状态,实现转弯或直行等运动。通过控制两电机的转速差来实现机器人在二维平面里的运动。
根据水面环境的栅格地图建模得到地图数据,将第二节规划的路径输出为一系列路径点,在栅格地图中,路径规划后,发布的路径如图2所示,绿色线条即为发布的路径。
图2路径规划中,可归纳无人测试船的三种运动情况,测试船在遇到边界前进行直线运动,转角有锐角、直角、钝角三种情况。取其中钝角时如图3所示。

图3 钝角情况示意图
无人测试船先到达点A、转弯后到达点B、最后到达C,在图4中,假设AB=a,BC=b,AC=c,设定阈值为L,由此可得动态圆的半径:

根据C点相对直线AB的位置,即可确定出角速度的方向,已知两点 p1(x1,y1),p2(x2,y2),假设p1与 p2不重合,则任意点 p(x,y)相对直线L的位置,可根据Temp,可由以下模型得到:

判断点与直线位置关系步骤如下:
1)若x比Temp小,则点p位于直线L左侧;
2)若x比Temp大,则点p位于直线L右侧;
3)若x与Temp相等,则直线L穿过点p。
如图4所示,由半径R根据线速度和角速度的数学关系,计算转弯比例大小。则在转弯的路径单元内,无人测试船从点A到点C的过程为先由点A直线运动到点M,然后以点O为圆心,R为半径,弧线运动到点G,最后直线运动到达点C。

图4 动态圆计算示意图
4 平台测试并比较效率
ROS(Robot Operating System)是一个机器人软件平台,它能为异质计算机集群提供类似操作系统的功能[7]。在其可视化功能下RVIZ下可以发布路径点,能够实时的可视化路径,进而实现机器人的仿真实验。对于水面环境建模后利用本文算法得到的路径规划如图5所示,红色线条为本文算法规划的路径。
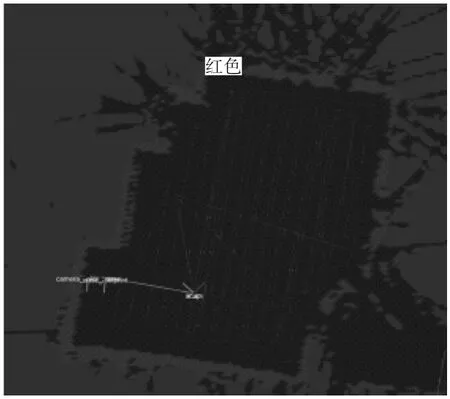
图5 实际栅格地图路径规划
在机器人的控制中,坐标系统是非常重要的,在ROS使用TF软件库进行坐标转换[8]。在不同节点中不断发布和接受TF转换信息,则可以得到父坐标系和子坐标系的转换关系,从而模拟实际机器人的移动,转换信息还包含一些调试需要的发送频率、运行时间等信息。利用ROS的工具,利用CLion集成软件编写程序,分别发布拉链等路径规划信息,来测试算法的效果。实际测试中用了多个基础单元,以减小误差,以拉链路径为例,如图6所示,其中两个正交坐标系分别对应为地图坐标map和无人测试船坐标base_footprint。
5 结语
本文基于无人测试船平台将水面环境建模为栅格地图,提出了一种高效率的测试船全覆盖路径规划策略,根据路径规划的路径点进行了转角的动态圆优化,最后搭建实验环境加以验证算法效果。首先在栅格地图上进行覆盖式路径规划,目标点实际位置关系计算出动态半径,然后确定角速度方向,最后确定速度大小发布主题,运动控制节点订阅主题数据,即实现无人测试船的路径规划。
下阶段的研究中将尝试用其他的路径优化方法[9],同时会尝试使用贝塞尔曲线[10]或者椭圆来代替转角圆弧优化,以期得到更好的效果。
猜你喜欢
重庆理工大学学报(自然科学)(2022年1期)2022-02-18
数理化解题研究·综合版(2021年11期)2021-12-22
小学教学研究(2021年5期)2021-09-29
北京航空航天大学学报(2021年5期)2021-06-09
军民两用技术与产品(2021年2期)2021-04-13
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
初中生世界·九年级(2020年2期)2020-04-10
小哥白尼·趣味科学画报(2019年12期)2019-02-28
大科技·C版(2018年11期)2018-10-21
岷峨诗稿(2017年4期)2017-04-20