
反恐防暴机器人运动控制系统设计
2018-10-21 05:38顾辉丁亚峰何兴臣
大科技·C版 2018年11期
顾辉 丁亚峰 何兴臣
中图分类号:TP242 文献标识码:A 文章编号:1004-7344(2018)32-0293-01
在機器人路径规划中,一般用到的有三种地图,分别为特征地图、拓扑地图和栅格地图。
机器人使用的三维激光雷达方案,因为扫描频率高,在短时间内,扫描得到的点的数据十分庞大,所以对每个栅格来说,都可以用大量点的数据来推测它的属性(是不可通行的障碍物还是可通行的平地、陡坡、高台)。
建立一个栅格地图,根据本机器人整体技术指标的需要和激光雷达精度的性能,栅格地图的精度为500×500(mm),即每个栅格的长和宽都为500mm,整个地图包含10×10个方格,即地图长度为10个栅格,宽度为10个栅格。本系统通过激光雷达扫描环境后一般产生十几万个三维点坐标,所以将这些点根据它们的横坐标和纵坐标映射到平面上的栅格中,同时保留这些点的高度信息。
由于反恐防暴机器人在野外环境执行任务时,会遇到凹凸不行的路面,此时运用激光雷达测量的环境高度会出现较大误差,另外有时测的高度确实超出了机器人所能通过的阈值高度,但是如果是斜坡地形,则机器人同样有可能通过(斜坡角度小于机器人能通过的斜坡角度阈值),所以本论文采用检测一个栅格内的最高点和最低点的梯度差来判断一个栅格的属性。
将扫描到的点云环境按照平面二维坐标虚拟成一个个规定大小的栅格,每个栅格中有若干个坐标点。在每一个栅格中,计算此栅格中最高高度和最低高度的高度差h,如果高度差h小于机器人能通过的高度的阈值H,则认为此栅格为平地或可通行的高台、坡面地形。如果高度差h大于机器人能通过的高度的阈值H,则继续检测坡度。对这个栅格内的点运用最小二乘法进行拟合,拟合的平面模型为:
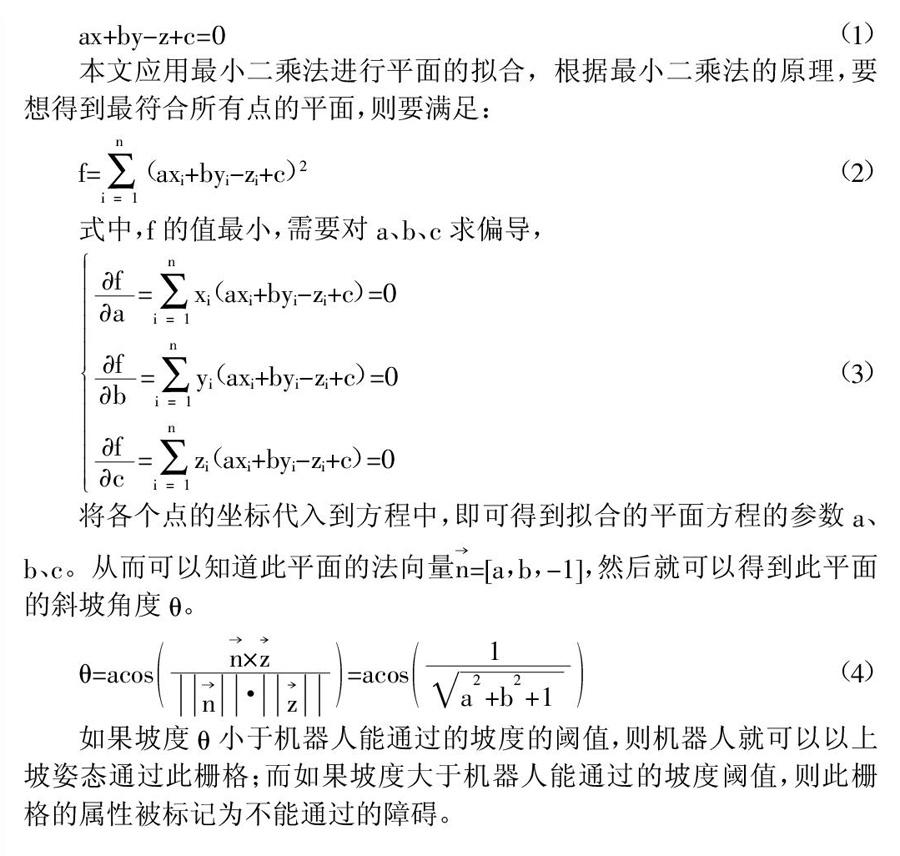
ax+by-z+c=0(1)
本文应用最小二乘法进行平面的拟合,根据最小二乘法的原理,要想得到最符合所有点的平面,则要满足:
如果坡度θ小于机器人能通过的坡度的阈值,则机器人就可以以上坡姿态通过此栅格;而如果坡度大于机器人能通过的坡度阈值,则此栅格的属性被标记为不能通过的障碍。
收稿日期:2018-9-10
猜你喜欢
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
考试与评价·高二版(2020年4期)2020-09-10
福建基础教育研究(2020年3期)2020-05-28
移动通信(2019年2期)2019-03-27
绿色科技(2016年20期)2016-12-27
兵器知识(2016年11期)2016-11-03
新媒体研究(2014年14期)2014-08-22
