基于目指信息的潜射线导鱼雷环形搜索方案研究∗
2021-11-11 14:22李家腾范学满
舰船电子工程 2021年10期
李家腾 刘 剑 范学满
(海军潜艇学院 青岛 266199)
1 引言
随着鱼雷航程的提高,发射平台的性能限制了对目标的侦察探测能力,在鱼雷远距攻击中,仅仅依靠潜艇来获取目标信息较为困难,无法充分发挥鱼雷航程远的优势,必须考虑远程目标指示系统(下文简称目指)的信息支援。但是在复杂电磁环境作战条件下目指信息也存在着信息不连续、目指精度低、存在时间延迟等问题[1],此时若采取鱼雷射前一次性目标指示实施鱼雷远距攻击的方法,将会大大降低鱼雷捕获目标的概率,增加鱼雷攻击的难度甚至根本无法实施。
针对远距离、大误差条件下目标散布区域较大的问题,提高鱼雷捕获目标概率,文献[1]提出了利用目指信息引导线导+声自导鱼雷实施攻击的思想;文献[2]通过分析目指信息引导下的鱼雷远距攻击流程,建立了线导鱼雷远距攻击数学模型;文献[3~6]研究了鱼雷机动搜索方案。但在可查阅的文献中,缺乏对目指信息保障下潜射线导鱼雷环形搜索的研究。本文在分析目指信息保障下潜射线导鱼雷现在时刻推算方位导引法的基础上,对环形搜索半径、环形搜索时机、环形搜索初始及结束后直航航向等开展研究。
2 基于目指信息的线导鱼雷攻击模型
2.1 目指信息传输模型



图1 目标指示信息时间延迟组成


图2 目标指示信息传输时间轴

2.2 目标运动假设及其模型
2)目标运动模型[2]
假设目标做匀速直线运动,则目标任意时刻的坐标可由式(2)进行推算:

式中:Xm(t)、Ym(t)为目标t时刻的坐标,Xm(t-1)、Ym(t-1)为目标t-1时刻的坐标,Vm(t-1)为目标t-1时刻的速度,Cm(t-1)为目标t-1时刻的航向,Δt为仿真时间步长,一般取Δt=1s。
2.3 现在时刻推算方位导引模型
目指信息保障线导鱼雷攻击时,潜艇收到的目标位置信息并不是目标当前时刻的位置,要想将鱼雷导引到目标的现在方位上[10],必须根据提供的目标信息推算目标现在时刻的位置,并将鱼雷导引到现在时刻目标方位上,这种导引方法称为现在时刻推算方位导引法,如图3所示。


图3 现在时刻推算方位导引模型

设鱼雷初始直航段航向为C0,根据鱼雷遥测数据可知鱼雷航向CT、航速VT、航深VT和鱼雷坐标XT、YT,则鱼雷经过初始直航段后的鱼雷航向和转角为

当n≥2时,目标现在时刻位置坐标为[2]

根据推算的目标现在时刻位置坐标,将鱼雷导引到现在时刻目标方位上,可根据下式求得鱼雷航向和鱼雷转角:

3 基于目指信息的潜射线导鱼雷环形搜索方案
线导鱼雷远距攻击关键在于线导导引阶段和机动搜索阶段,前者将线导鱼雷导引至目标散布区域,后者通过设置合适的搜索策略,以较大的概率捕获目标,从而完成鱼雷发射、导引、搜索、捕获直至完成攻击的过程。鱼雷机动搜索可在更大范围覆盖目标位置散布[1],针对这一目的,笔者提出了一种环形搜索方案,其基本过程如图4所示。
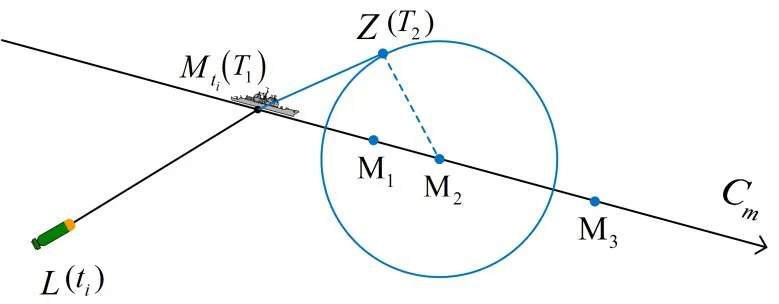
图4 过线环形搜索

3.1 目标散布区域半径的数学描述
将引导兵力探测到目标信息的时刻作为初始时刻,设初始时刻目标的位置点 Xm和Ym,速度Vm,航向Cm,四个量有独立的密度函数,服从正态分布,其标准差分别为 σX、σY、σV、σC,其中 σX、σY为 Xm、Ym的标准差,在引导兵力通报时,一般提供圆概率误差CEP,此时σX、σY具有同样的数值,即 σX=σY=0.84932CEP,其中心值为 X0、Y0、V0、C0。则t时刻目标位置散布的近似二维正态分布密度函数为[11]

式中:Δx,Δy为目标实际位置与散布中心点位置的差异量,r为相关系数,σ1、σ2为横轴、纵轴方向标准差。令

文献[11]详细推导了目标位置散布的概率密度公式,本文不再赘述。根据概率论,随机变量分布在 μ±2σ(随机误差在±2σ范围内)的概率达0.9544[12]。因此,设定目标位置散布在长轴为a=2σ1,短轴为 b=2σ2的椭圆区域内,为确保目标位置在圆域内的概率不低于在椭圆域内的概率,故取目标散布区域半径R=max(a,b)。
由以上分析可知,目标散布区域半径可表示为时间t的函数:

式中:V0、C0分别为侦察兵力探测的目标速度和航向,σX、σY分别为 Xm、Ym的标准差,σV为速度标准差,σC为航向标准差,t为从引导兵力探测到目标信息的时刻到需要求解目标散布区域半径的时刻所经历的时间。
3.2 鱼雷执行环形搜索时刻的求解
鱼雷越过目标航向线后,需经过一段时间直航后才执行环形搜索,下面以攻敌右舷为例,计算执行环形搜索的时刻。


由此可求解T1:

设T2时刻鱼雷开始执行环形搜索,此时鱼雷航行至Z点,目标航行至M2点,M2Z为环形搜索的半径,可用下式求得:




联立式(14)~(20),采用迭代法可求解T2。
3.3 鱼雷越过目标航向线后的直航航向的求解

可得鱼雷直航航向为

若攻敌左舷,鱼雷直航航向为

3.4 环形搜索一周后鱼雷航向的求解
鱼雷环形搜索一周后,若未能搜索到目标,且在鱼雷执行环形搜索的过程中未接收到新的目指信息,则当鱼雷环形一周后,将鱼雷导引到推算的目标现在时刻位置,设鱼雷环形一周结束后的时刻为tk时刻,则此时鱼雷航向为



4 基于目指信息的线导鱼雷捕获概率仿真
4.1 线导鱼雷捕获概率仿真


表1 D0=15n mile鱼雷捕获概率对比表

表2 D0=20n mile鱼雷捕获概率对比表
表中,Vm表示目标航速,单位为节;Qm表示初始敌舷角,单位为度;P(N)、P(Y)分别表示不采用和采用过线环形搜索所对应的捕获目标概率。
为更直观显示采用和不采用过线环形搜索法鱼雷捕获目标概率的区别,绘制鱼雷捕获目标概率对比表,如图1、图2所示。

图5 D0=15n mile鱼雷捕获目标概率图

图6 D0=20n mile鱼雷捕获目标概率图
图中,横坐标表示初始敌舷角Qm,单位为度;纵坐标表示鱼雷捕获目标概率;用‘+’连接的曲线表示不采用过线环形搜索;用‘〇’连接的曲线表示采用过线环形搜索。
4.2 结果分析
由以上数据可以得出以下结论:
1)相较于单纯使用现在时刻推算方位导引法实施鱼雷攻击,采用过线环形搜索法可大幅提高鱼雷捕获目标概率。
2)相同初距和敌舷角情况下,鱼雷捕获目标概率随敌速的增大而减小;相同敌速和敌舷角情况下,鱼雷捕获目标概率随初距的增大而减小。因此,更远的鱼雷航程和更快的雷速将是未来战上克敌制胜的关键因素。
3)相同初距和敌速情况下,采用过线环形搜索法相比于不采用过线环形搜索法,鱼雷捕获目标概率随初始敌舷角增大的变化更为稳定,且呈逐渐降低的趋势。这就要求指挥员在收到目指信息后,尽快根据目标信息确定初始态势,当处于有利态势时应尽快实施攻击,以免因敌舷角过大而贻误战机。
5 结语
潜艇在目指信息引导下使用线导鱼雷实施远距攻击时,当鱼雷越过目标航向线后采用环形搜索方法可有效提高鱼雷捕获目标的概率,提高鱼雷作战效能。同时初始距离、初始敌舷角、目标速度等因素对鱼雷捕获目标概率也有较大影响,在复杂战场环境下,潜艇指挥员应结合具体态势,统筹各种因素的影响,灵活运用,保证潜射线导鱼雷的攻击效果。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
中学生数理化(高中版.高考数学)(2022年3期)2022-04-26
中学生数理化(高中版.高考数学)(2022年3期)2022-04-26
中学生数理化·高三版(2021年3期)2021-05-14
中学生数理化·高三版(2021年3期)2021-05-14
少儿科技(2021年4期)2021-01-11
兵器知识(2020年2期)2020-03-20
当代陕西(2019年17期)2019-10-08
文萃报·周二版(2019年46期)2019-09-10