基于北斗卫星辅助的岸舰导弹行进间对准研究
2021-11-08 01:59吕卫民刘陵顺张天琦臧恒波
兵器装备工程学报 2021年10期
李 根,吕卫民,刘陵顺,张天琦,黎 东,臧恒波
(1.海军航空大学,山东 烟台 264001;2.中国人民解放军77120部队,成都 621100)
1 引言
未来海上战争中如果能先于敌人发现、先于敌人打击,就能取得整个战局的主动[1]。岸舰导弹是以攻击敌方水面船艇目标为主的制导武器,其一般部署在作战一线的海岸或岛礁,对实现迅速打击和灵活机动的需求显得尤为迫切。本文针对车载式岸舰导弹,提出一种行进间弹载惯导对准方案。
惯性制导是实现岸舰导弹制导的关键组成,惯性制导正式开启运行模式前需获取姿态、位置和速度信息,即初始对准[2-3]。速度和位置的对准相对较容易,姿态对准是初始对准的难点和关键,本文主要对姿态对准进行研究。传统的车载岸舰导弹弹载惯性导航系统发射前的初始对准在停车状态下进行。车载北斗卫星导航可提供载体的位置与速度信息,在地面运动状态下,可辅助对弹载惯导系统进行对准,也就是行进间对准[4]。利用北斗卫星导航辅助的行进间对准能够有效减少岸舰导弹发射之前的静止准备时间,提高导弹系统反应能力,对于实现岸舰导弹快速打击和提高生存能力具有重要意义[5-8]。
2 岸舰导弹行进间对准过程
工程应用中的初始对准一般分为粗对准与精对准[9]。在粗对准方面,谭红力[10]阐述了采用GPS输出参数与惯导部件测量值共同组成解析粗对准的方法,但要求载体保持匀速水平线性运动的状态,战场环境的适应性不强。马建萍[11]使用惯性凝固的假设,采用GPS输出参数辅助惯导初始对准,但其需要有停车状态以提升对准精度,适用性受到一定程度限制。韩鹏鑫[12]提出弹载惯导系统在惯性系条件的对准快速性、准确性较好。精对准方面,卡尔曼滤波是非常经典的方法,但卡尔曼滤波的精度较大程度受控于建立系统的模型精确度和噪声信息[13]。利用残差的自适应卡尔曼滤波可以较好地提高预测精度[14-15]。
本文在上述工作基础之上,建立了岸舰导弹弹载惯导系统行进间对准的模型,应用北斗卫星导航信息实现车载岸舰导弹地面行进间对准,提出了利用双矢量定姿的惯性系粗对准和基于协方差自适应卡尔曼滤波精对准实现岸舰导弹行进间对准的方案,在岸舰导弹向发射场地的运动过程中便可实现对准。为减小误差,车载北斗卫星导航系统接收机安装于导弹发射筒下靠近导弹弹载惯性导航测量部件的位置。北斗卫星导航系统辅助岸舰导弹行进间对准的主要流程为,设备的上电自检测、对准初始化、行进间粗对准和行进间精对准,对准结束进行姿态保持,其流程如图1所示。其中核心部分是双矢量定姿惯性系粗对准和协方差自适应卡尔曼滤波精对准。
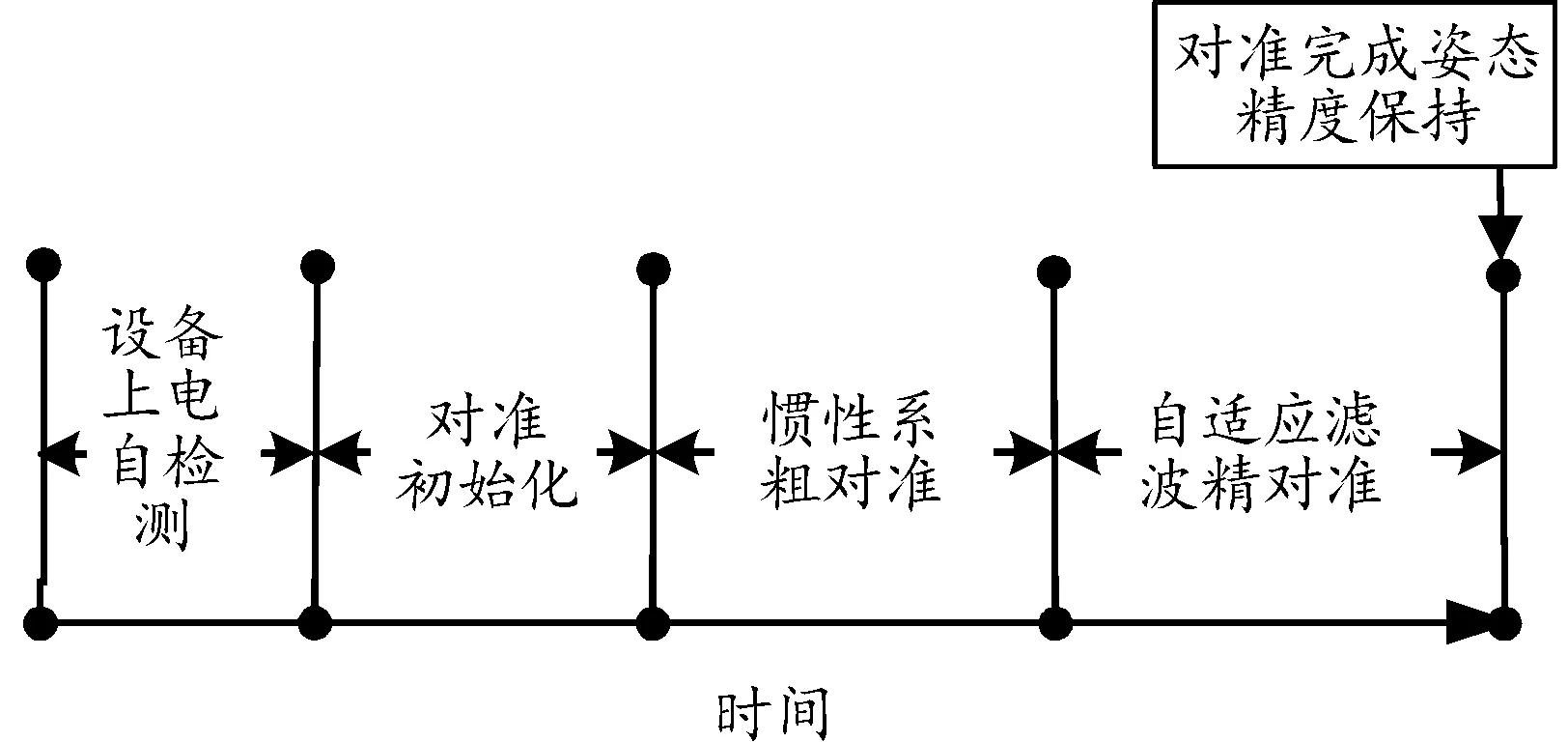
图1 行进间对准流程简图
粗对准阶段把岸舰导弹弹体受到的比力在惯性坐标系下两个不相同时间点的速度积分用作参考值[16],引入北斗卫星导航测量信息,利用双矢量定姿的方法实现,迅速将姿态误差角收敛到小角度。
精对准过程把粗对准估计出的值用作精对准的初始参考,应用基于协方差的自适应滤波方法,实现残差方差的自适应调节,进一步提高对准精度。
3 惯性系粗对准过程
首先建立岸舰导弹粗对准的坐标系,取b为前-上-右的岸舰导弹弹体坐标系;n为北-天-东的导航坐标系;e为地心经线坐标系;n0是粗对准初始时刻的导航惯性系,和粗对准初始时刻的n系相重合;b0是粗对准刚开始时岸舰导弹的弹体惯性坐标系,和粗对准刚开始时的b系相重合;i是地心惯性坐标系。
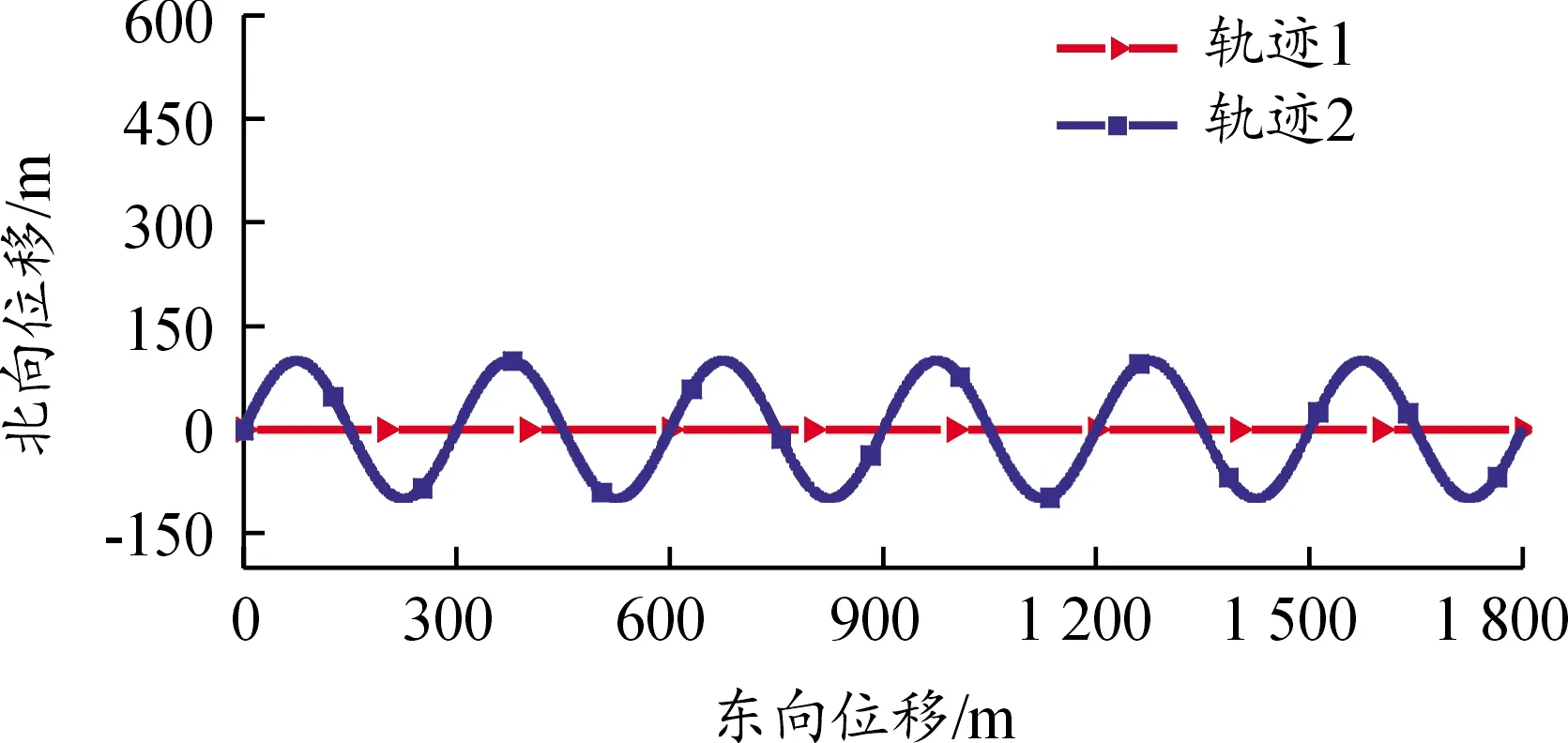
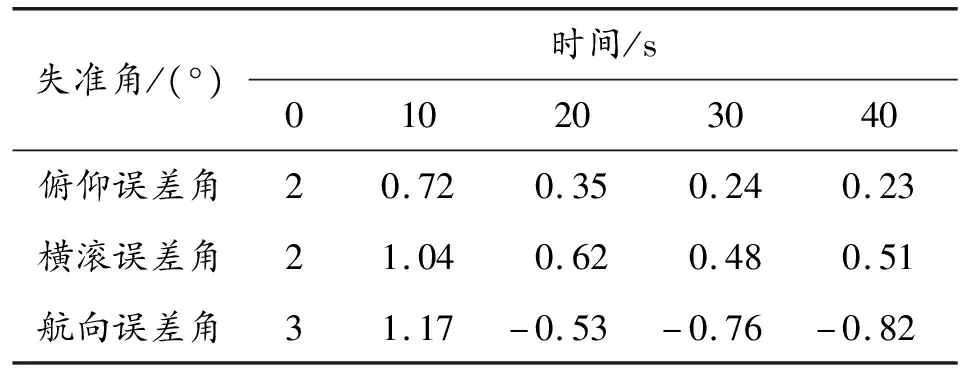
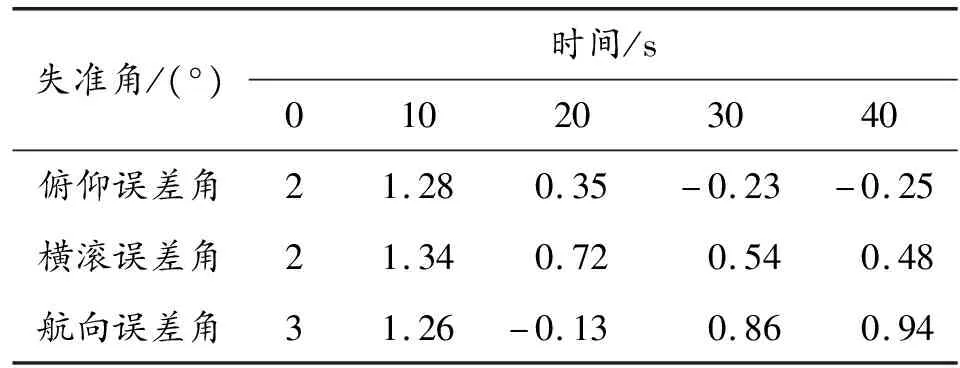
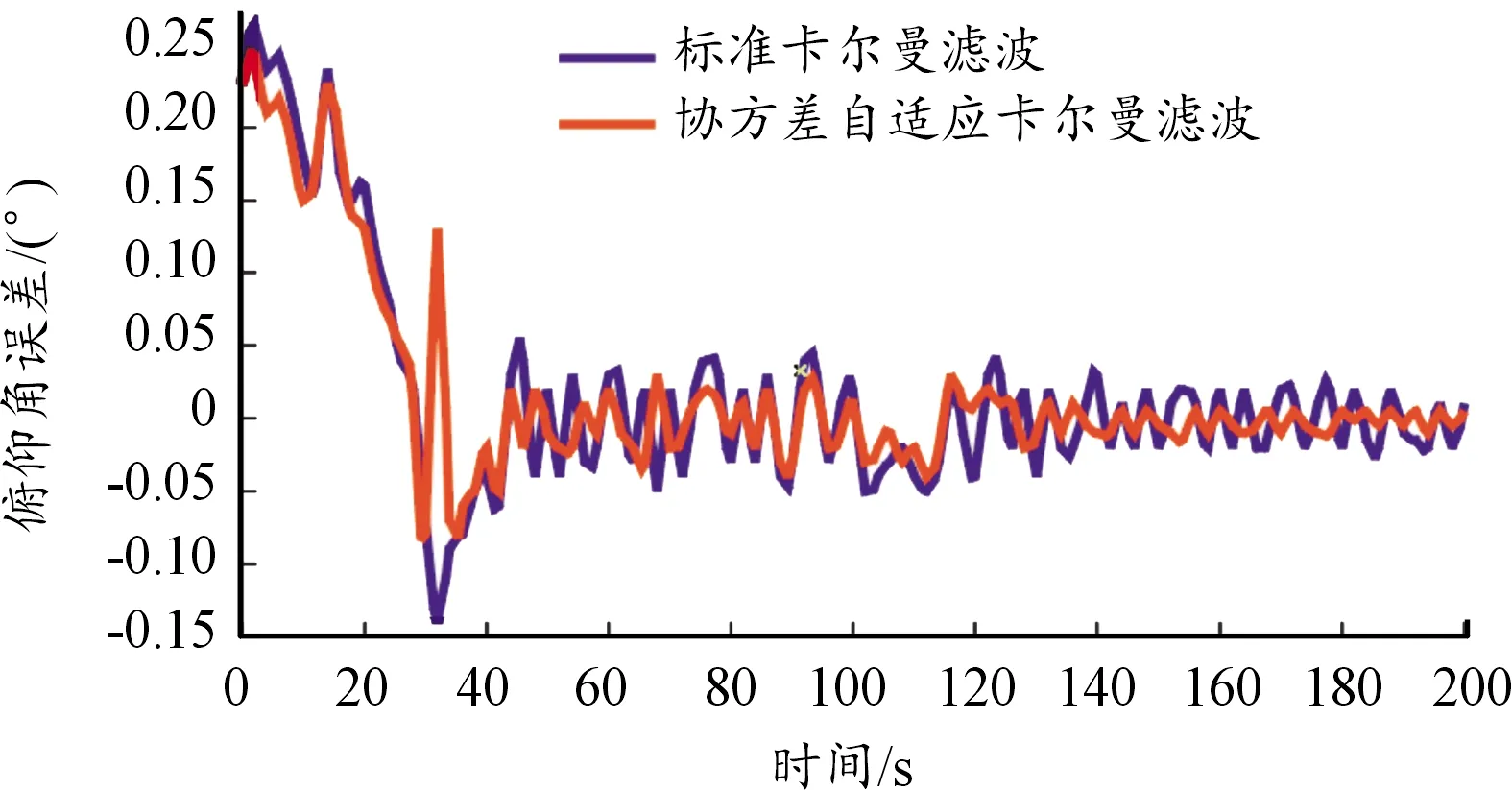
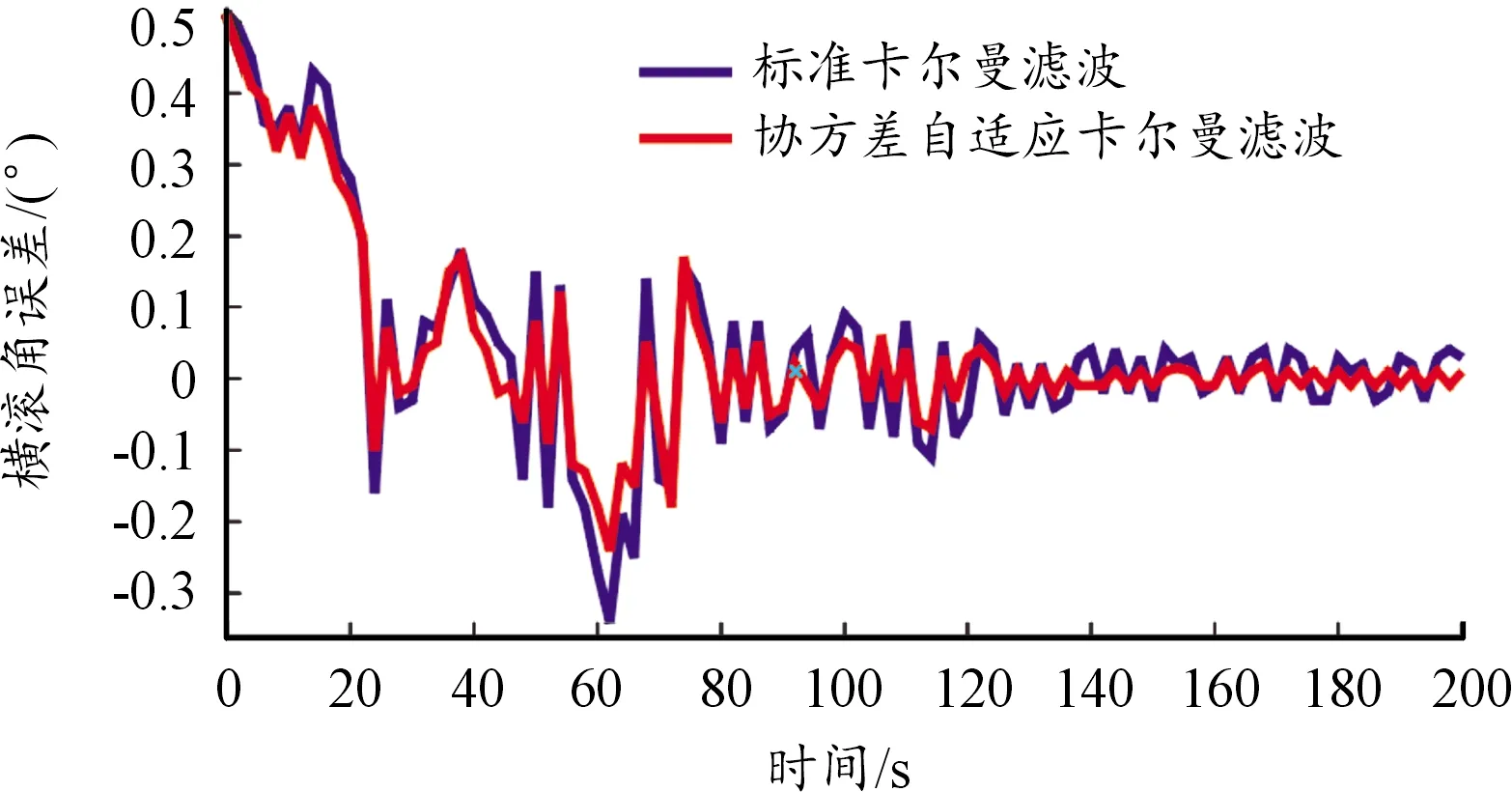
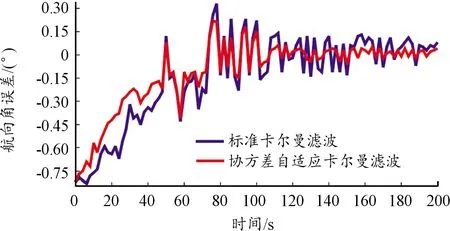
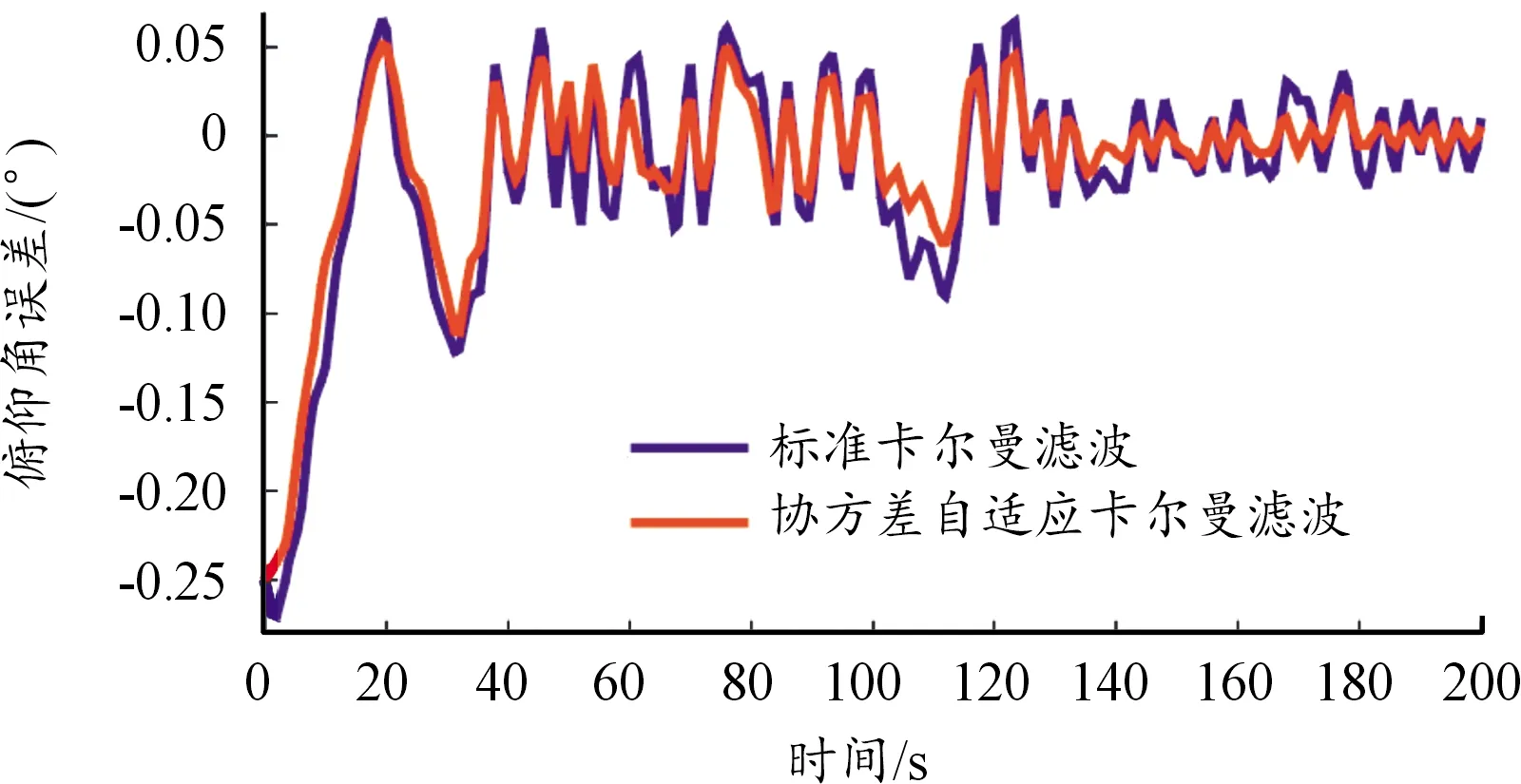
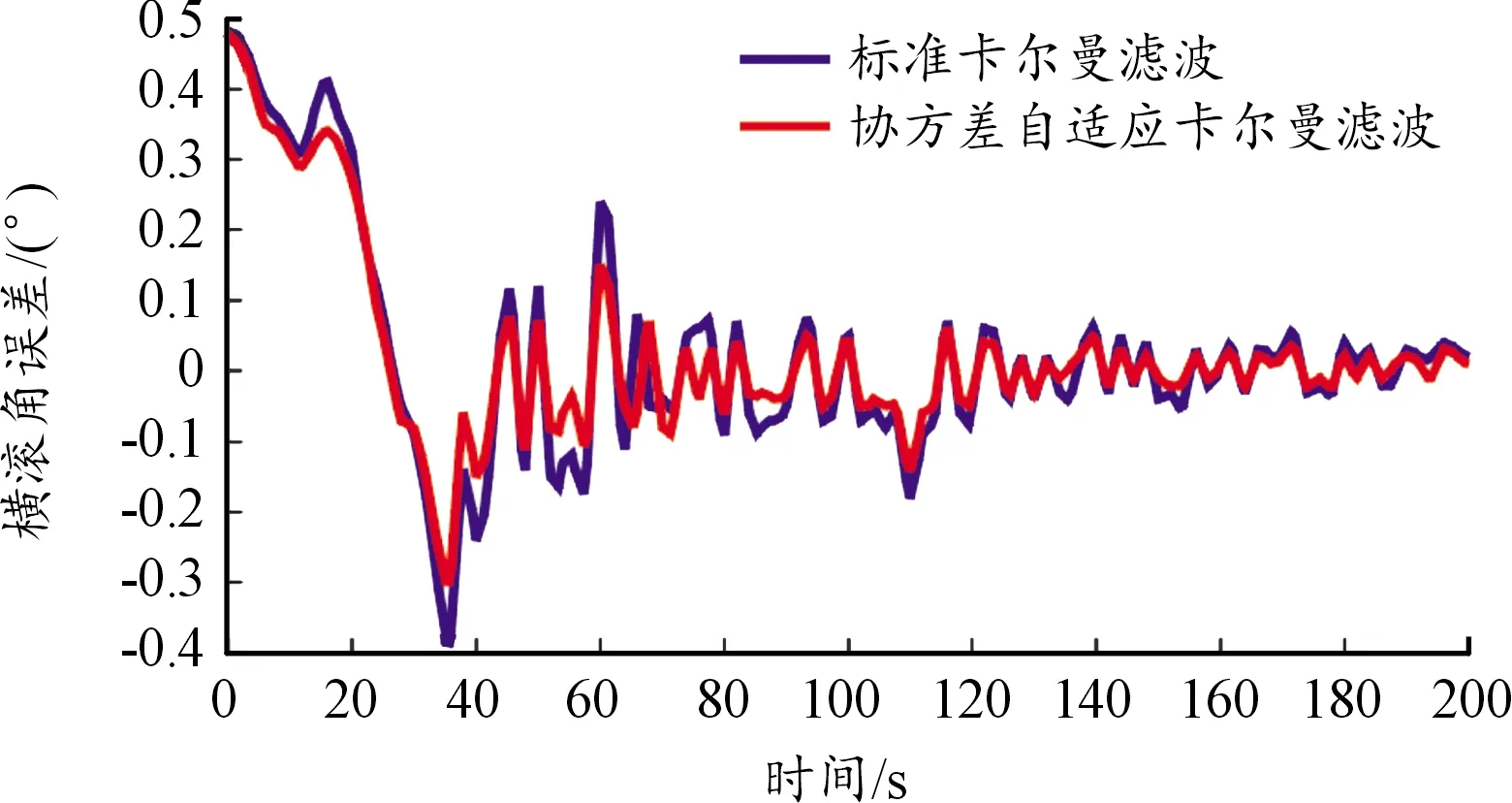
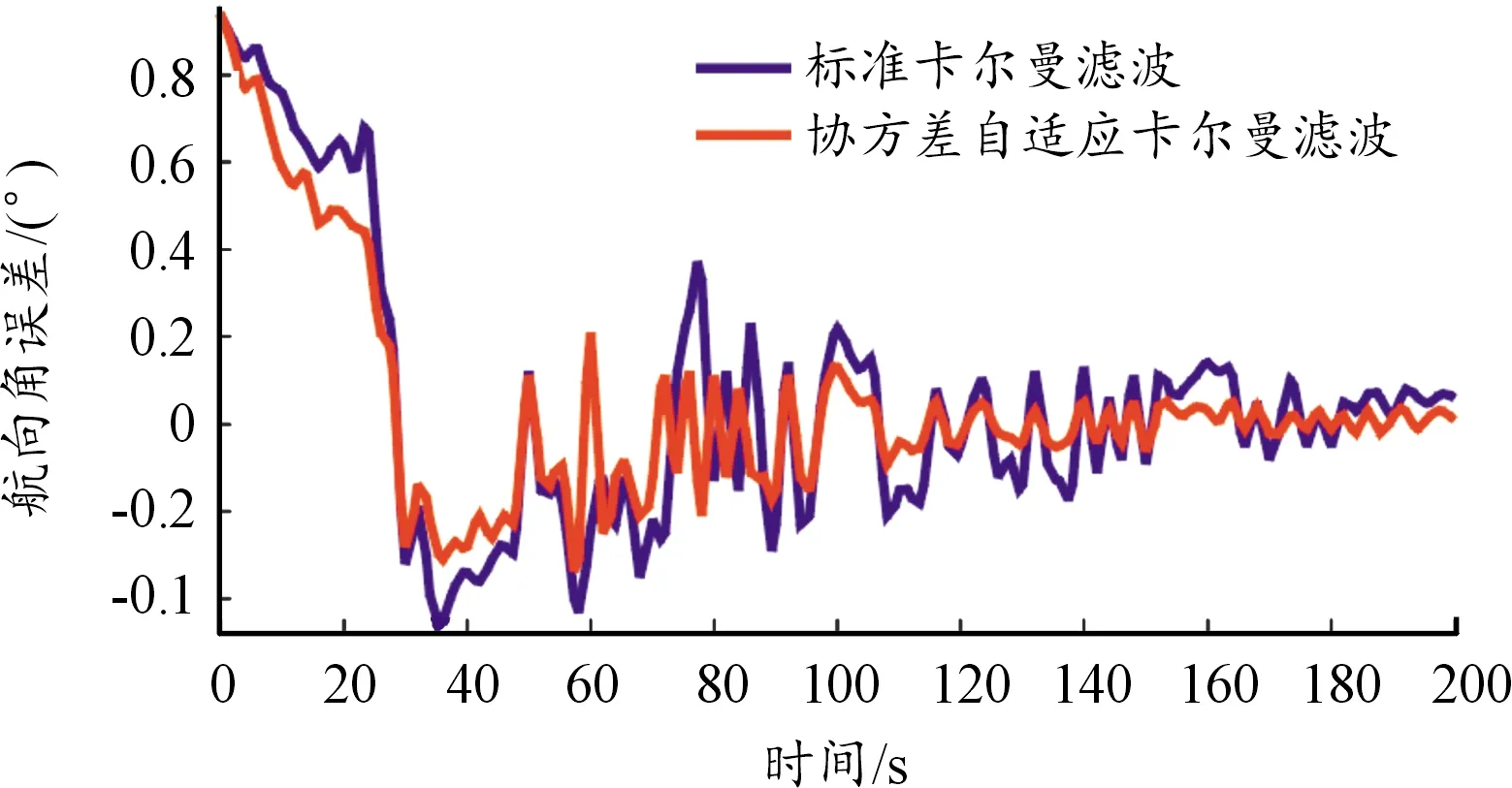
为了减小噪声对粗对准结果产生影响,取两个任意不同时刻ts和tl(ts (1) 式(1)中: (2) (3) 同理: (4) (5) 展开得到: (6) 式(6)中:λ=λ-λ0+ωiet,L0、λ0表示为粗对准开始时刻岸舰导弹所在的经纬度,L、λ表示为t时刻岸舰导弹的实时经纬度,由北斗卫星导航系统测量输出给定;式(6)中si=sin(i),ci=cos(i)。 根据比力方程可得: (7) 将式(7)代入式(4)可得: (8) 对式(8)等号右边第一项分部积分,得到: (9) 又: (10) 将式(10)代入式(9)后再代入式(8),得: (11) 使用卡尔曼滤波实现快速收敛需要设置较大初值方差,过大初值方差容易增大卡尔曼滤波估计误差。另外卫星动态定位时,卡尔曼滤波器实现最优估计也有一定难度。为了实现精对准快速收敛和高精度,使用协方差自适应卡尔曼滤波方法动态调节各通道增益,实现滤波优化和稳定。 北斗卫星导航可测出载体的位置和速度,而速度测量值有相对较大的噪声,对位置进行适当阻尼处理能有更好的估计效果,同时加速度计偏差也相对较难实现准确估计。考虑模型精确度与滤波器计算的复杂度,建立10维误差状态传播模型为: (12) 利用北斗卫星导航对系统观测,其模型如下: (13) 式(13)中:LINS、λINS为弹载惯导系统输出的地理纬度和经度;LBDS、λBDS为北斗卫星导航系统测量的地理纬度和经度。 建立如下状态与测量方程: (14) 式(14)中,Xk为k时刻状态矢量,也就是被估计矢量;Zk为k时刻的测量矢量;Ak,k-1为k-1时刻到k时刻的转移阵;Wk-1为k-1时刻的系统噪声;Hk为k时刻的测量矩阵;Vk为k时刻的测量噪声。 标准卡尔曼滤波是递推线性最小方差的估计,离散卡尔曼滤波基本方程如下。 状态一步预测方程: 状态估计值计算方程: 滤波增益方程: 式中,Rk为测量噪声方差。 一步预测均方误差方程: 式中,Qk-1为系统噪声方差。 估计均方误差方程: Pk=(I-KkHk)Pk-1,k 为了更好地平抑干扰的影响,提高精度和使收敛速度更快,以标准卡尔曼滤波器为基础,在协方差部分引入自适应因子,将测量值和预测值进行融合,协方差分解为固定项和可变项,实现可变协方差自适应增益因子解算,进而进行自适应调节,以达到快速收敛和高精度。 系统的残差Ek为 系统测量残差的方差为 (15) 式中:把误差协方差矩阵Pk-1,k分解为固定项与可变项2个部分,表示为 (16) 其中,α为自适应增益因子。 把式(16)代入式(15)中,有: (17) 根据式(17),通过调节自适应增益α,可实现相应优化。进行N点采样之后,可得出系统测量残差协方差的平均值: (18) 式(17)是卡尔曼滤波所得残差协方差矩阵,式(18)是通过测量计算所得残差协方差矩阵,α作为优化变量,可得出式(17)和式(18)间的最小差值代价函数,代价函数采用Frobenius范数表示,定义为: (19) 式中:‖·‖表示Frobenius范数,定义为‖A‖2=tr(AAT);J(α)是以α为优化变量的代价函数。 把式(13)与式(17)代入式(19)中,有: (20) 其中: (21) 由于β=βT,则式(20)对α进行微分有: 要使代价函数J(α)最小,即有: 即: (22) 自适应增益因子α为对角阵,联立式(21)与式(22),得到α的计算公式: 其中,diag[·]表示取对角矩阵。 仿真的初始位置设为纬度37.6°,经度121.5°,海拔18 m。初始失准角ψE、ψN、ψU分别取为2°,2°和3°。 惯性测量部件的仿真参数设置为,陀螺仪、加速度计的数据频率为200 Hz。陀螺仪的常值漂移为0.02(°)/h,随机漂移为0.02(°)/h。加速度计的初始偏差取50 μg,随机偏差为50 μg。北斗卫星导航仿真参数条件,设置为水平面位置精度2 m,高度精度3 m,测速精度0.1 m/s,数据更新频率10 Hz。 为便于仿真而又不失典型性,选择2条具有代表性的运动轨迹,分别为加减速直线运动和匀速连续曲线运动,岸舰导弹发射车的行进机动过程基本上是这2种运动形式的组合。仿真试验地面行进间轨迹仿真图如图2,轨迹1为车载岸舰导弹作加减速直线运动,以1 m/s2的加速度持续作加减速运动,初始速度为2 m/s,最高速度为10 m/s,最低速度为2 m/s。轨迹2为按行进轨迹为y=100*sin(π*x/150)以4 m/s速度作连续曲线运动。设置道路颠簸对车载岸舰导弹行驶引起噪声的方差强度为0.1°。 图2 车载岸舰导弹运动仿真轨迹曲线 粗对准仿真结果如表1、表2所示。由粗对准仿真结果可以看出,直线加减速运动和曲线匀速运动情形下粗对准均可迅速把姿态误差角收敛至小角度,给精对准提供相应参数值。精对准仿真试验中分别以轨迹1和轨迹2对应的粗对准结果(0.23°,0.51°,-0.82°)、(-0.25°,0.48°,0.94°),作为精对准的初始值。 表1 轨迹1粗对准仿真结果 表2 轨迹2粗对准仿真结果 运动轨迹1情形下岸舰导弹行进间精对准数学仿真结果如图3~图5所示。 图3 轨迹1俯仰角误差精对准仿真曲线 图4 轨迹1横滚角误差精对准仿真曲线 图5 轨迹1航向角误差精对准仿真曲线 由轨迹1得到的精对准仿真结果可得,直线加减速运动仿真情况下,协方差自适应卡尔曼滤波能够于120 s内达到稳定收敛,而标准卡尔曼滤波则需要150 s左右,协方差自适应卡尔曼滤波的收敛速度更快。在精度方面,自适应卡尔曼滤波俯仰和横滚方向对准精度优于0.02°,航向方向对准精度优于0.04°,标准卡尔曼滤波俯仰和横滚对准精度大约是0.04°,航向方向对准精度优于0.15°,协方差自适应卡尔曼滤波对准精度较标准卡尔曼滤波更优。 运动轨迹2情形下岸舰导弹行进间精对准数学仿真结果如图6~图8所示。 图6 轨迹2俯仰角误差精对准仿真曲线 图7 轨迹2横滚角误差精对准仿真曲线 图8 轨迹2航向角误差精对准仿真曲线 由轨迹2得到的精对准仿真结果可得,匀速曲线运动仿真情况下,协方差自适应卡尔曼滤波能够于130 s内达到稳定收敛,而标准卡尔曼滤波则需要160 s左右,协方差自适应卡尔曼滤波的收敛速度更快。在精度方面,自适应卡尔曼滤波俯仰和横滚方向对准精度优于0.03°,航向方向对准精度优于0.06°,标准卡尔曼滤波俯仰和横滚对准精度大约是0.05°,航向方向对准大约为0.15°,协方差自适应卡尔曼滤波对准精度较标准卡尔曼滤波更优。 综合精对准仿真结果可以看出,直线加减速运动和匀速曲线运动情况下,运用标准卡尔曼滤波与协方差自适应卡尔曼滤波方法精对准均能使弹载惯导系统的姿态得到进一步估计,方位与水平通道应用协方差自适应卡尔曼滤波的对准收敛速度和精度均优于标准卡尔曼滤波,协方差自适应卡尔曼滤波的性能更优。 为了实现岸舰导弹弹载惯导系统地面行进间对准,本文针对性地提出了一种基于车载北斗卫星导航辅助的动基座对准方案。仿真验证了该算法的有效性,能够很好地实现岸舰导弹弹载惯导系统快速发射和提高生存能力,可为岸舰导弹弹载捷联惯导系统地面行进间对准的工程实现提供借鉴。


4 协方差自适应卡尔曼滤波精对准
4.1 岸舰导弹行进间精对准模型

4.2 标准卡尔曼滤波
4.3 协方差自适应卡尔曼滤波

5 仿真分析
5.1 仿真条件
5.2 粗对准数学仿真结果
5.3 精对准数学仿真结果
6 结论
猜你喜欢
电子工业专用设备(2022年1期)2022-07-13
舰船科学技术(2022年10期)2022-06-17
导航定位与授时(2022年1期)2022-02-18
数字海洋与水下攻防(2020年5期)2021-01-04
舰船电子工程(2020年3期)2020-06-11
导航定位与授时(2020年3期)2020-06-08
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
考试周刊(2016年54期)2016-07-18
现代电子技术(2015年10期)2015-05-29