组合优化算法改进的室内位置感知方法
2021-08-29 07:50韩学法时瑶佳
导航定位学报 2021年4期
韩学法,吴 飞,朱 海,时瑶佳
(上海工程技术大学 电子电气工程学院,上海 201620)
0 引言
随着科学技术的不断发展,基于位置的服务(location based service,LBS)的应用已经遍布生活中的各个方面,如车载导航系统、基于LBS的推荐系统以及其他应用系统,它们均采用了基于LBS的定位导航技术[1-2]。但是,这些应用在室外环境效果很好,在室内却无法进行精确位置识别,所以室内位置感知技术非常具有研究价值。由于无线局域网覆盖范围较广,无线保真(wireless fidelity,WiFi)定位技术能够满足人们对室内定位的需求,其最大的优势是成本低、计算开销小、定位精度较高[3-5]。因此,根据WiFi 信号进行室内移动目标位置识别的研究具有重要意义。
根据室内移动目标所处的环境信息进行室内场景准确识别,是基于位置服务的应用的技术关键。目前,基于位置感知的研究已成为学术界和工业界的研究热点[6-8]。现有的研究主要利用全球定位系统(global positioning system,GPS)、蓝牙、地磁、射频识别(radio frequency identification,RFID)、超宽带(ultra wide band,UWB)以及同步定位和制图(simultaneous location and mapping,SLAM)等信号源进行位置感知。但是,GPS 信号在室内环境中存在弱缺现象而无法满足人们室内定位的需求[9-11];蓝牙定位技术仅适用于小范围的定位[12];其他方法也存在各自的不足。文献[13]采用GPS信号进行移动用户的定位,但该方法适用范围有限,无法满足室内定位需求;文献[14]提出一种通过监视人们的日常行为进行位置估计的方法,这种技术在火灾等紧急情况中比较适用,但易受周边环境的干扰;文献[15] 提出了一种基于支持向量机(support vector machines,SVM)的位置识别算法,结合用户不同行走姿势进行位置感知,但是识别准确率低,定位均值误差达3.53 m;文献[16]提出一种基于神经网络的多传感器数据融合定位算法,能够对行人行走情况进行预判分类,但准确性不高;文献[17]利用机器学习方法,提出了一种适应多种环境的室内定位策略,但位置识别效果不是很好。
近来,对基于位置的服务的需求日益增加。尤其是在大型室内场所,这种移动目标的定位需求愈加强烈;研究室内移动目标的位置感知就显得尤为重要。为了解决现有研究方法的室内位置识别准确率较低、稳定性较差的问题,本文提出一种优化的室内移动目标的位置感知方法,通过采集用户在室内区域行走时智能手机接收到的周边接入点(access point,AP)的WiFi 信号数据,根据接收信号强度指示(received signal strength indicator,RSSI)值来建立位置指纹数据库,并将采集的数据作为样本对本文方法进行测试。
1 相关方法原理
1.1 粒子群算法
粒子群算法(particle swarm optimization,PSO)是文献[18]提出的一个典型的非线性的智能优化算法。PSO 受到觅食行为的启发,以群体和适应度为出发点,寻求解空间的最优解。PSO 算法就是基于目标优化的数学模型,具体定义为:
1.2 引力搜索算法
引力搜索算法(gravitational search algorithm,GSA)是由文献[19]提出的一种启发式优化算法,该算法是以万有引力定律和牛顿第二定律为基础,通过种群的粒子位置移动来寻找最优解。假设N个粒子构成一个搜索空间,则第i个粒子的位置定义为

式中:N为搜索空间的维数;为第i个粒子在第d维空间的位置。
该算法首先将所有粒子随机放置在一个搜索空间中,在t次迭代运算时,粒子i、j间的相互引力定义为

式中:Mpi和Maj分别为粒子i、j的惯性质量;ε为常数;G(t)为第t次迭代时的引力系数;Rij为粒子i、j的欧式距离。Gt和Rij的计算公式为:
式中:G(t0)为引力系数初始值;α为引力系数;k为当前迭代次数。第i个粒子在第d维空间的引力计算公式为

式中rj为分布于[0,1]的随机数。第t次迭代时,粒子i的加速度与合力成正比,引力质量成反比,其计算公式为

式中:t为迭代次数;Mi(t)为粒子i的引力质量。每次迭代时,粒子i的速度和位置迭代更新的计算公式为:
式中ri为分布于[0,1]的随机数。假设每次迭代时,粒子的引力质量与惯性质量相等,则第t次迭代时,粒子i的质量mi(t)迭代更新计算公式为
式中fi(t)为粒子i在t次迭代时的适应度值。对于最小值最优化问题,最优适应度值fbest(t)和最差适应度值fworst(t)的计算公式为
式中j表示粒子j。对于最大值最优化问题,最优适应度值fbest(t)和最差适应度值fworst(t)的计算公式为
在实际应用过程中,粒子i的质量需要进行归一化,其计算公式为
2 改进的室内位置感知方法
2.1 改进的混合优化算法
由于PSO 算法的全局搜索能力强但速度较慢,而GSA 算法的局部搜索能力有限,它们各有所长,于是本文将二者结合起来,提出一种改进的组合优化算法,即PSOGSA 算法,以提高算法的适用性。
由式(9)和式(10)可知,GSA 算法仅保留迭代过程中当前位置信息,而无法在搜索过程中找到最优解,也就是说GSA 算法是一种缺失记忆能力的算法。本文结合PSO 算法全局搜索能力强的特点,对GSA 算法进行改进,增强其记忆搜索能力。整个搜索过程中,粒子运动方程为
式中:V(it)是粒子i在第t次迭代时的速度;为加速度系数;Xgbest为粒子i在迭代过程中位置的最优解。则权重系数的计算公式为

式中:ωmax和ωmin分别为ω的上下限;Tmax为迭代次数的上限。PSOGSA 算法实现过程如图1 所示。
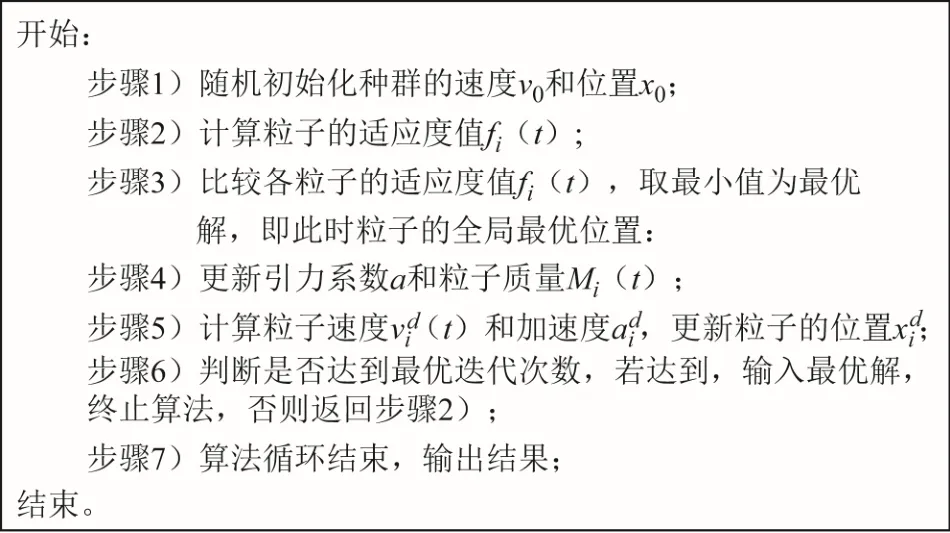
图1 PSOGSA 算法实现过程
2.2 基于PSOGSA-NN的位置感知模型
神经网络(neural network,NN)是一种易于理解且使用广泛的模型,该模型可以使用反向传播(back propagation,BP)算法进行预测分类[20]。对于室内定位来说,准确高效地识别出行人等移动目标的位置很关键。因此,本文将采集到的WiFi信号覆盖区域的RSSI 值作为位置指纹特征,以移动用户所在的位置区域作为分类标签,构建样本数据集,且样本数据集定义为
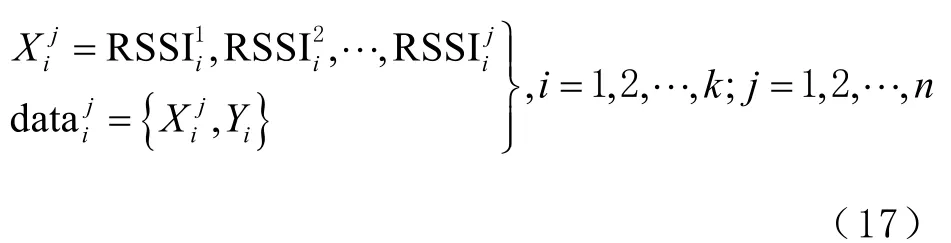
式中:i、j分别为区域位置的数目和AP 个数;为在第i个区域采集到第j个AP的RSSI 值。基于神经网络的室内位置感知模型主要包括输入层、隐含层和输出层,具体的模型结构如图2 所示。
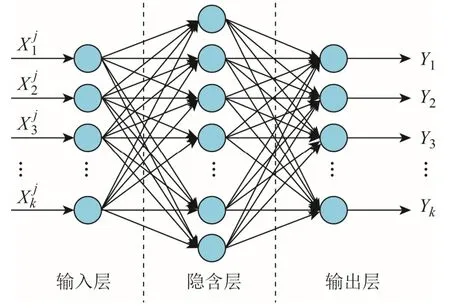
图2 室内位置感知模型
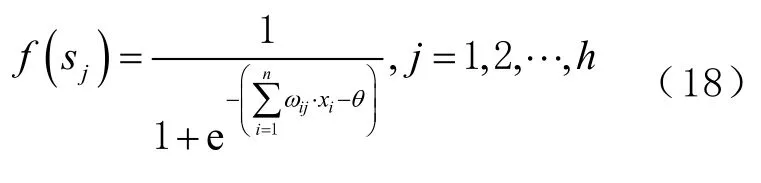

式中:fi为粒子i当前的适应度值;fmin和fmax分别为粒子i最大和最小适应度值,其实就是将每个粒子的适应度值归一化。θ的计算公式如下:

式中Vtc为第t次迭代时粒子当前的速度。
在室内定位中,通过sj和θ可以确定ω′,从而提高室内位置感知模型的识别率和准确率。基于PSOGSA-NN的位置感知模型如图3 所示。
由图3 可知,基于PSOGSA-NN 位置感知模型的核心是PSOGSA-NN 算法,该算法的具体实现过程如图4 所示。

图3 基于PSOGSA-NN的位置感知模型
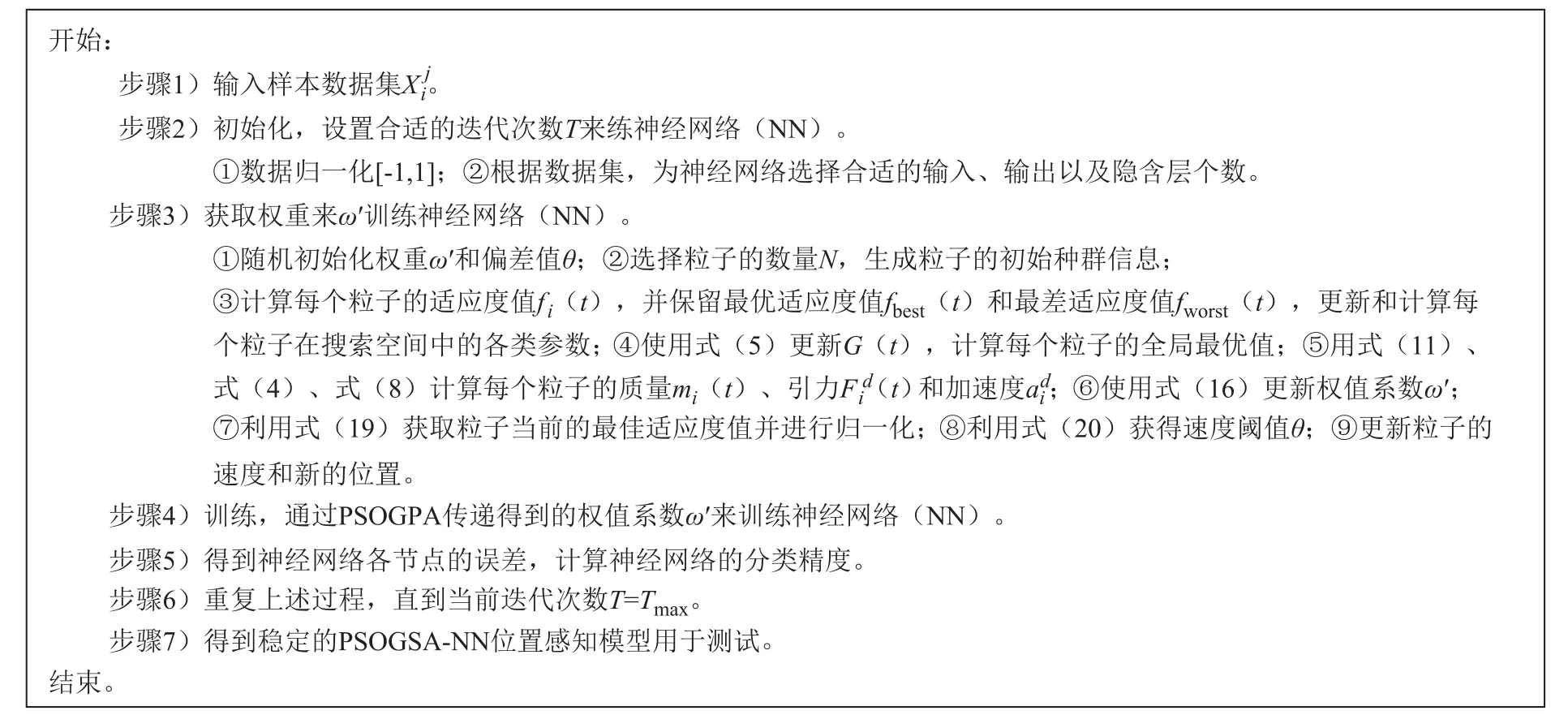
图4 PSOGSA-NN 算法实现过程
3 实验与结果分析
3.1 实验环境
为了验证本文所提方法,选择某实验大楼中4个较为空旷的教室作为实验区域进行定位实验。实验场地的平面示意图如图5 所示。
实验人员手持装有自主开发的信号采集软件GetSensorData2.1的智能手机,行走在实验区域内,采集实验区域周边AP的WiFi 信号。
3.2 数据采集与处理
实验人员通过采集实验区域周边AP的RSSI值来构建位置指纹数据库,从而得到实验所需要的样本数据集。实验时,实验人员右手手持P30 智能手机于胸前,行走在实验区域进行WiFi 信号采集。采集过程中,频率均为50 Hz,数据采集界面如图6 所示。
实验时,分别采集房间1~房间4的数据,每个房间采集500 次,每次取接收到AP 信号的RSSI均值作为位置指纹,实验区域的RSSI 信号变化如图7 所示,图7(a)~图7(d)分别为房间1~房间4的RSSI 信号变化情况。
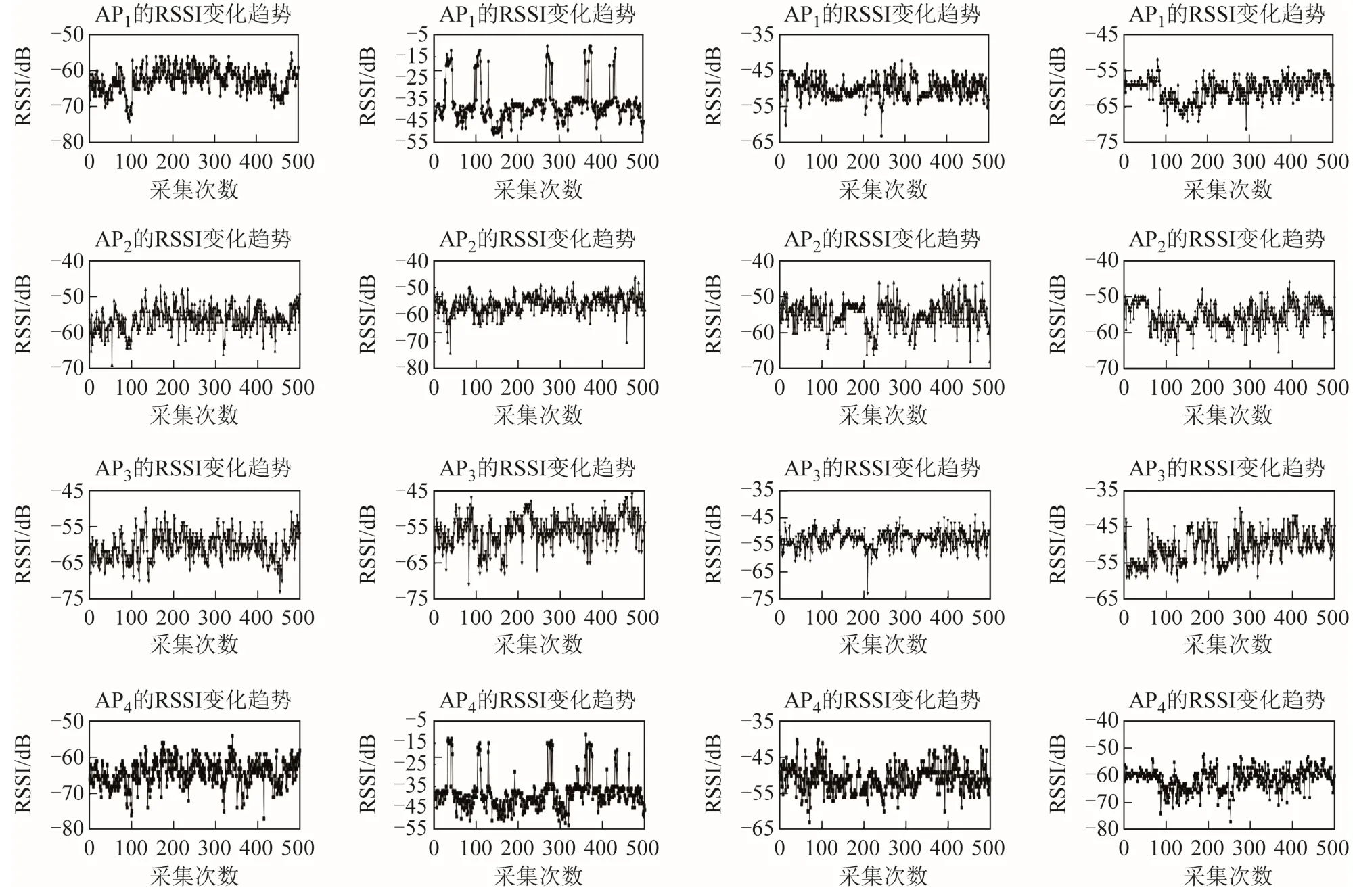
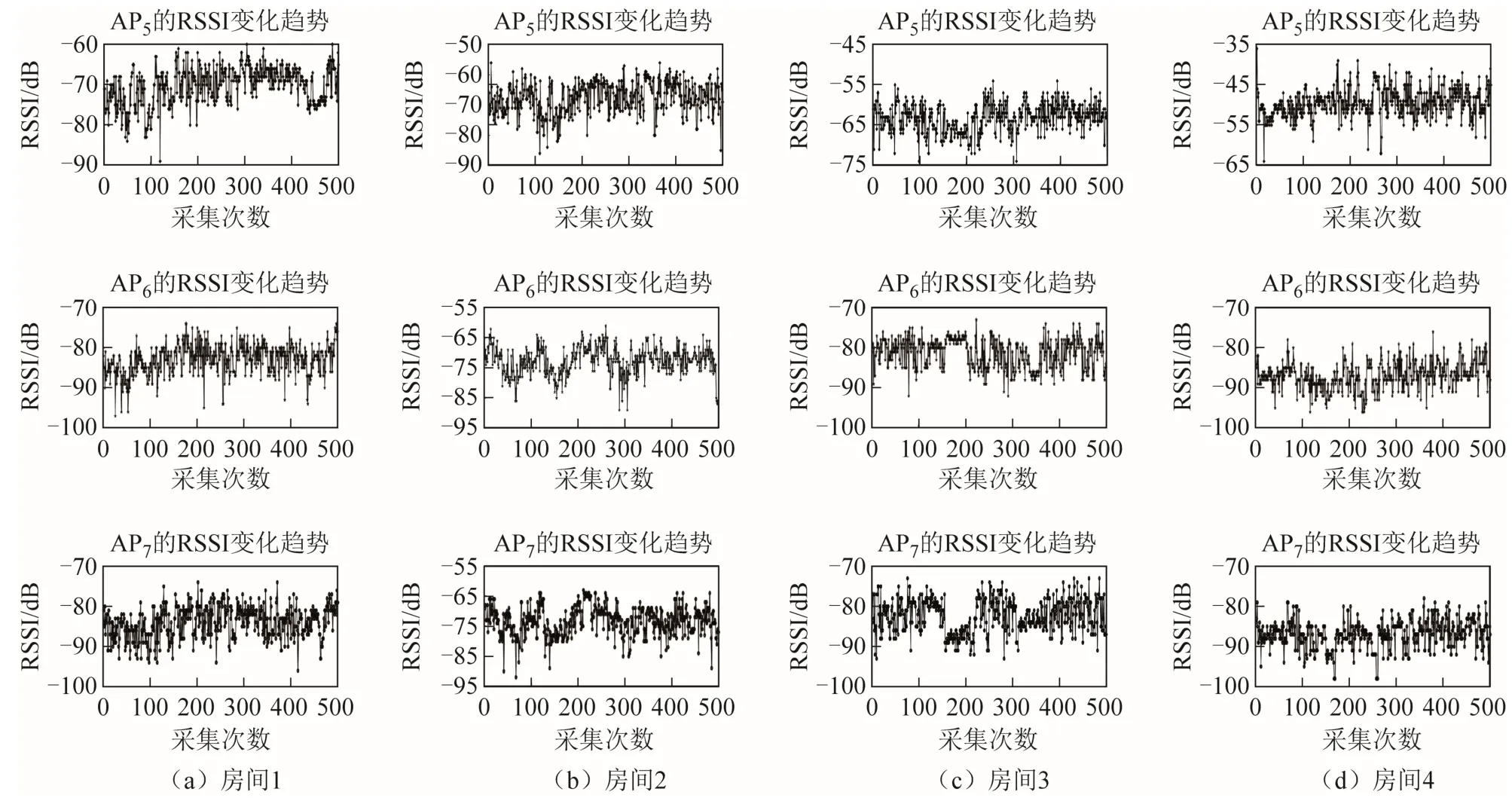
图7 不同房间的RSSI 信号变化
由图7 可知,不同位置的RSSI 信号存在差异,即RSSI 信号存在空间差异性,故可通过位置指纹来进行区域识别。数据经过处理后,每个房间仅保留500 条位置指纹样本,部分位置指纹样本信息如表1 所示,前7 列为RSSI 值,单位为dB,最后一列为房间类别编号。

表1 不同房间的位置指纹样本信息
3.3 结果分析
为了进一步验证本文方法的可行性,将2 000 条样本数据分为2 个部分,1 400 条作为训练集,600 条作为测试集。在机器学习中,ROC(receiver operating characteristic)即接收器操作特征曲线是用来描绘学习器的泛化能力的有力工具;而AUC(area under ROC curve)即ROC 曲线下的面积,用来度量分类模型的好坏。本文实验过程中,通过绘制不同类别的 ROC 曲线来进行模型评估,用AUC 作为模型评价指标。对于分类问题,也常用分类准确率作为评价指标。对于本文的位置感知识别准确率(racc)的定义为
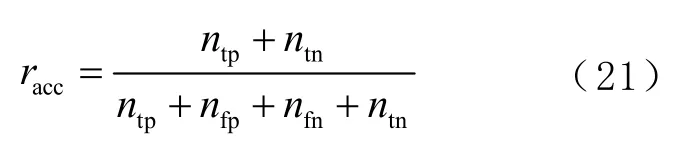
式中:ntp为预测房间类别与真实房间类别一致的样本数;nfp为预测房间类别与真实房间类相反的样本数;nfn为将预测错误的房间分类结果作为正确结果的样本数;ntn为将预测正确的房间分类结果当作错误结果的样本数。在ROC 曲线中横纵坐标分别为假正率(rfp)和真正率(rtp),它们的定义公式为:

为了进一步评价本文所提方法的性能,通过实验得出如图8 所示的效果。
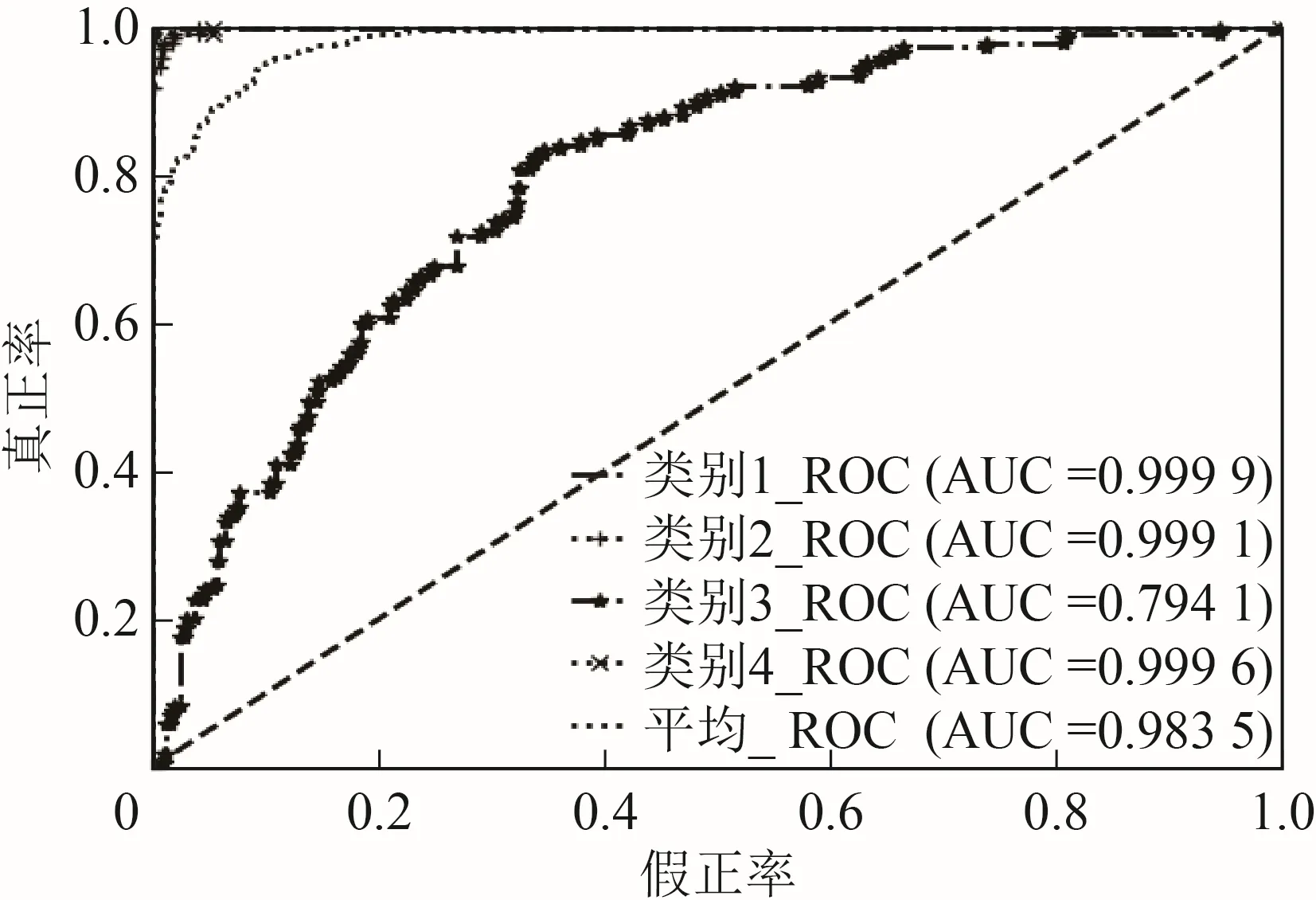
图8 本文方法的效果
由图可知,本文方法在室内的识别准确率较好,房间1 为99.99%,房间2 为99.91%,房间3 为79.41%,房间4 为99.96%,且平均准确率为98.35%。为了对比分析本文提出模型的效果,将本文模型(PSOGSA_NN)与支持向量机(SVM)分类算法、纳伊夫·贝叶斯(Naïve Bayes)分类算法、神经网络(NN)分类算法、粒子群-神经网络(PSO_NN)算法及引力搜索-神经网络(GSA_NN)算法进行对比,各类模型的识别准确率(所有类别的识别率的均值)如图9 所示。
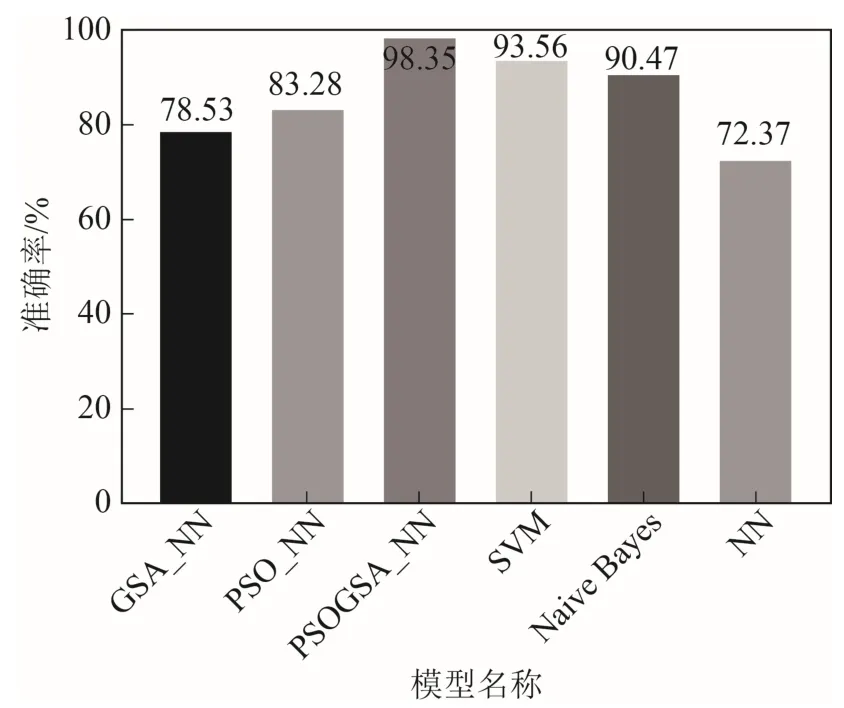
图9 模型对比的效果
由图可知,与同类方法对比,本文方法的位置感知识别准确率为 98.35%,比 SVM 算法高4.79%,比Naïve Bayes 算法高7.88%,比NN 算法高25.98%,比PSO_NN 高15.07%,比GSA_NN高19.82%。因此,本文方法的室内位置感知识别效果最佳,与同类方法相比,识别准确率至少提高4.79%。
4 结束语
为了解决现有研究方法的室内位置识别准确率较低、稳定性较差的问题,本文提出一种基于组合优化算法改进的室内位置感知方法。通过采集用户在室内区域行走时智能手机接收到的周边AP的WiFi 信号数据,根据采集的RSSI 值来建立位置指纹数据库,将采集的数据作为样本对本文方法进行测试。实验结果表明本文方法的室内位置感知识别准确率为98.35%,与同类方法相比,识别准确率至少提高4.79%。由于本文所进行的实验是以位置区域类别作为位置标签,AP的RSSI 值为位置特征,且位置标签是已知的,所以具有应用局限性。下一步将研究如何在位置未知的情况下进行室内位置识别,从而提高模型的适用性。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
健康之家(2021年19期)2021-05-23
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
健康体检与管理(2021年10期)2021-01-03
高中生学习·高二版(2017年9期)2017-10-25
当代旅游(2016年10期)2017-04-17
考试周刊(2016年44期)2016-06-21
财经理论与实践(2015年2期)2015-04-16
新高考·高一物理(2014年4期)2014-09-17