无人机欺骗干扰源设计实现
2021-08-29 07:50杨再秀柳亚川
导航定位学报 2021年4期
杨再秀,柳亚川
(中国电子科技集团 第五十四研究所,石家庄 050000)
0 引言
当前,无人机技术日趋成熟,无人机在民用方向的应用迅速增加,带来了巨大的经济效应,给人们生活工作提供了便利。与此同时,由于无人机操作简单、价格低廉,使用群体逐渐面向普通民众;而当下无人机黑飞事件频发,影响了人们正常的生活工作秩序,因此需要针对无人机开展行之有效的管控。无人机欺骗干扰源,可模拟真实卫星信号生成欺骗信号,通过功率优势俘获无人机,实现对无人机的诱导管制,是当下无人机管控技术的研究热点[1-4]。
本文针对无人机欺骗干扰源的设计与实现展开研究。无人机欺骗干扰源由个人计算机(personal,computer,PC)端的控制软件与导航诱骗设备2 个部分组成:控制软件负责控制系统运行与人机交互;导航诱骗设备中数仿与信息处理模块采用数字信号处理器(digital signal processor,DSP)/现场可编程门阵列(field programmable gate array,FPGA)的架构,实现对信号参数计算和基带信号生成,并通过射频模块实现射频信号的输出。此外针对欺骗信号俘获无人机的方法做出分析。最终,研制出一款小型化无人机欺骗干扰源,可在非授权无人机进入特定空域前进行管控,避免对授权用户的影响。
1 小型化欺骗干扰源设计实现
1.1 欺骗信号模型
在全球定位系统(global positioning system,GPS)系统时t时刻的欺骗信号计算公式[5-9]为

式中:j为仿真的第j颗卫星;N(t)为系统时t时刻目标处可见星颗数;为所仿真卫星信号功率;Cj[t−τj(t)]为所仿真卫星的伪随机码;τj(t)为所仿真卫星到目标处的伪码传播延时;D j[t−τ j(t)]为所仿真卫星的导航电文数据;φj(t)为所仿真卫星载波相位;n(t)为随机噪声。
所仿真欺骗信号功率计算方法为

真实信号到目标处的伪码传播延时计算方法如下:

式中:c为光速;为系统时所仿真的卫星位置;pu(t+τsu)为GPS 时(GPS time,GPST)(t+τsu)时刻目标位置;为干扰源到目标处的传播延时;及为电离层延迟、对流层延迟和相对论效应引起的延迟。式(3)中第1 个等式代表真实卫星信号的传播延时,第2 个等式代表欺骗信号仿真时刻与真实卫星信号系统时之差。
1.2 系统总体设计
欺骗干扰源总体设计如图1 所示,包括导航诱骗设备、运行在PC 端的控制软件、接收天线与发射天线。
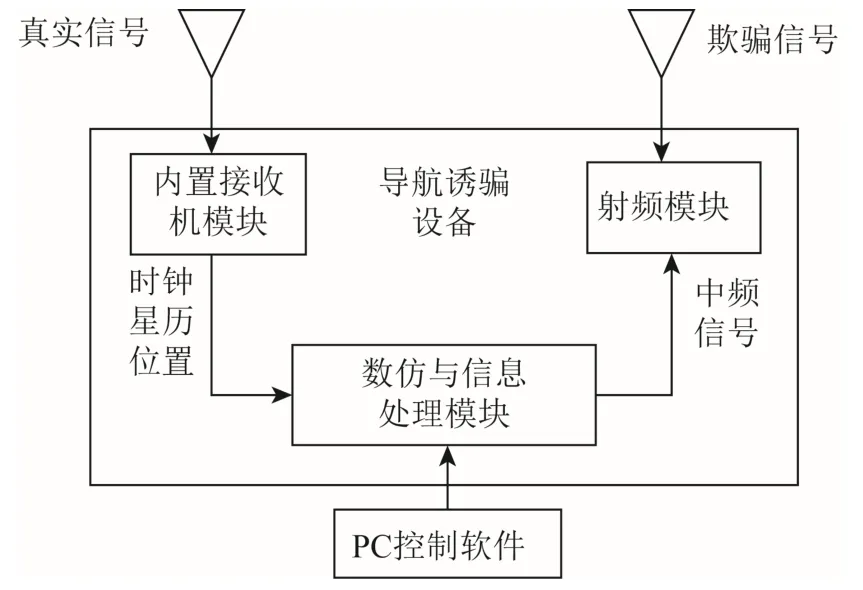
图1 欺骗干扰源组成
控制软件运行在外部PC 端,负责调控设备的运行、人机交互,与探测设备交互获取无人机位置速度信息。
导航诱骗设备包含数仿与信息处理模块、内置接收模块、收发天线和射频模块。
1.2.1 内置接收模块
欺骗干扰源中内置一个授时型接收机,通过串口与DSP 连接,授时型接收机使用接收天线接收真实卫星信号,获取当前的时间信息、星历等信息;接收机输出经驯服后的秒脉冲(pulse per second,PPS)和10 MHz 时钟信号,用于本地钟与系统时的同步;此外接收机提供接收天线位置,接收天线与欺骗干扰源位置较近,可用于估计欺骗干扰源与目标处的距离。
1.2.2 数仿与信息处理模块
数仿与信息处理模块采用 DSP+FPGA的架构,如图2 所示。考虑到DSP 处理速度和资源余量,本设计采用2 块DSP,分为控制DSP 和计算DSP。控制DSP 负责与控制软件和FPGA 完成控制命令交互和数据交互,实现对干扰源硬件设备的控制;同时控制DSP 与内置的接收机通过串口连接,读取接收机上传的时间、星历、位置等信息,完成信号参数计算、电文生成、数据打包等工作。计算DSP 需要根据控制DSP 计算的信号参数,推算载波数字控制振荡器(numerically controlled oscillator,NCO)和码NCO 控制字及初相、当前电文比特,并将计算的参数传递给FPGA 用于基带信号生成。FPGA 根据DSP 下发的参数完成基带信号生成,对电文进行调制,多路信号合路后发后端数字模拟转换器(digital to analog converter,DAC)处理,生成模拟信号。
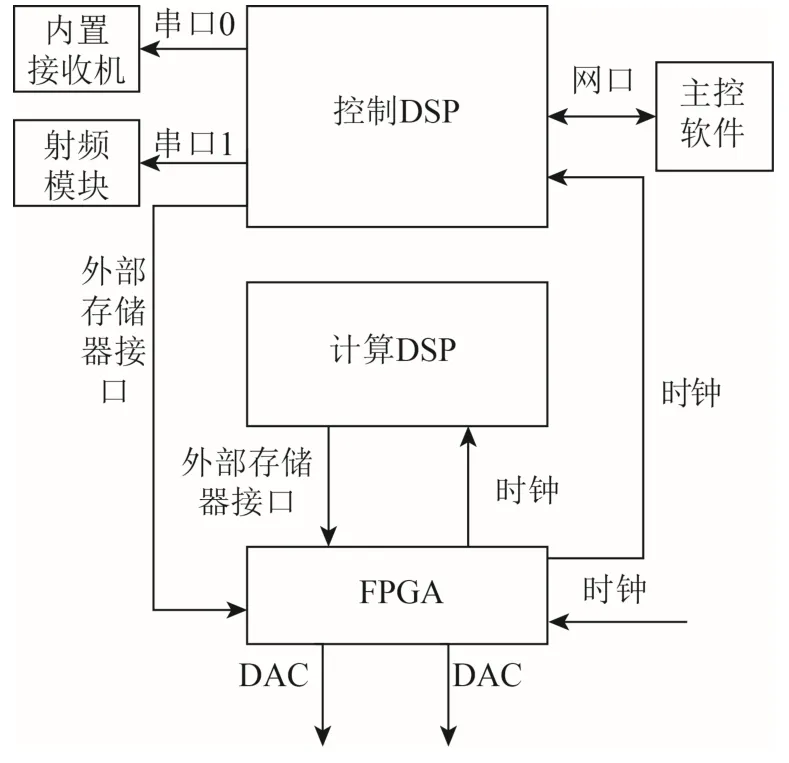
图2 数仿与信息处理模块
1)本设计中控制DSP 采用多线程结构,包含命令线程、下发线程、接收线程、数据处理线程、数据回传线程,处理来自电脑端控制软件的数据和来自内置接收机上传的数据,实现与计算DSP的交互。控制DSP 功能包括控制软件交互、接收机交互、参数计算、电文编排、误差仿真。
2)计算DSP 接收来自控制DSP的信号参数、伪距、时间信息,需要精确推算仿真时间的电文比特、载波NCO 与码NCO 控制字、初相,然后下发给FPGA,生成多路中频信号。
载波控制字计算中,考虑卫星和无人机之间的速度和加速度,暂不考虑加加速度的影响,由此可得

式中:R代表伪距;v代表速度;a代表加速度;v(t)代表t时刻卫星和无人机的相对速度;d(t)代表t时刻卫星和无人机的距离。
无人机与卫星之间的相对运动会引起多普勒效应,载波多普勒的计算公式为

式中:下标d 代表多普勒;f为信号频率。
欺骗信号t时刻的相位计算公式为

对连续信号采样,实现离散化,可得
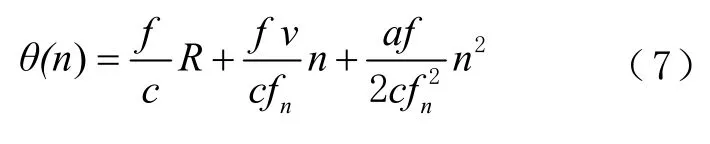
式中:fn为采样频率;n为离散化后采样点;第1 项为由当前伪距引起固定相移;第2 项为无人机与卫星之间的相对速度造成的多普勒频移;第3 项为无人机和卫星之间的相对加速度造成的相移。因此载波的数字控制振荡器采用2 阶高阶直接数字频率合成(direct digital synthesis,DDS)生成载波相位为
φ2(n+1)中同样含有乘法运算,同样由递推公式表示为

式中:a2=b1−c1;b2=2c1。

当n=0 时,由式(13)计算得

当n=-1 时,由式(14)计算得

由式(15)及式(16)得

因此相位φ(n)须用2 个累加器级连,如图3所示。
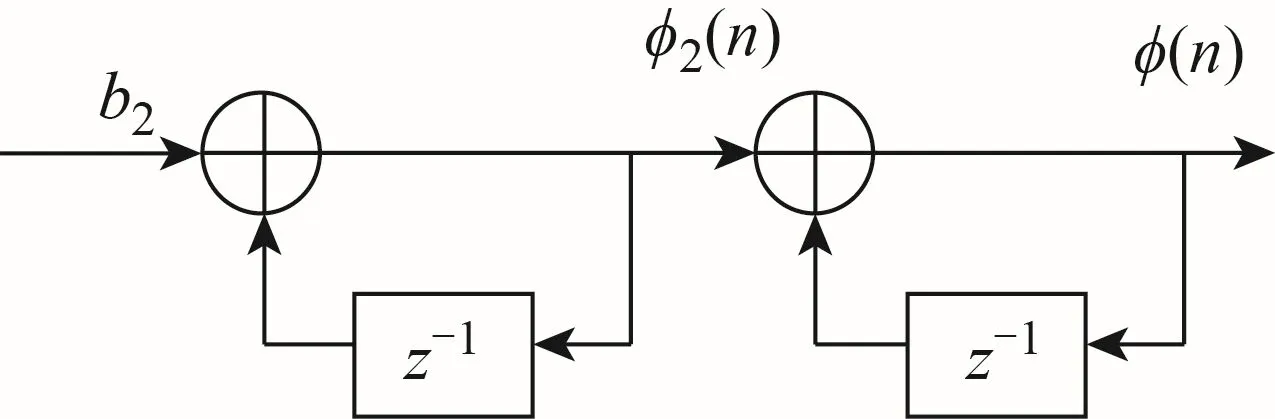
图3 2 级DDS 示意
图中:b2=2c1;φ2(− 1)=b1−3c1;φ(− 1)=a1−b1+c1;z−1代表前一个时钟值。以每个时钟递推得到该时刻的φ(n)。
码速率与载波频率相同,无人机与卫星之间的相对运动也会产生多普勒频移,而码速率与载波速率的比例关系为

式中:fRF为信号载波频率;fdopp为速度引起的载波多普勒频移;f0为码基准速率;fcode为增加了码多普勒频移后的码速率。
码速率NCO 控制字的计算公式为
式中:fc为采样时钟频率;n0为量化位数。
码相位的精确控制是实现欺骗信号与真实卫星信号同步的关键,因此需要精确计算欺骗信号仿真时刻所需的伪码相位。首先需要计算信号仿真时刻t时刻的卫星位置,再根据主控软件下发的无人机位置推算二者之间的伪距ρ,由此来计算得出卫星到无人机之间信号的传播延时

GPS L1 C/A 伪码的周期为Tc=1 ms,码速率为1.023 MHz,可得到1 个周期码片数N=1 023。首先求解传播时延τ中不足1 ms 剩余的码片数M为

式中mod 表示取余。
随后求解伪码发生器移位寄存器的初始码片值

对V取整,即移位寄存器的初始值,而小数部分是相位累加器的初始值

式中:floor 表示向下取整;L为累加器的位宽。
3)FPGA 需要和DSP 交互,获取载波NCO 和码NCO 控制字及相位、当前时刻的电文比特、信号参数等信息;根据当前时间选取要发送的电文比特,并根据控制字推动生成伪码序列和载波,再对数据比特进行扩频调制和BPSK 调制,生成单路的中频信号,然后对多路信号合成,生成合路信号。
1.2.3 射频模块
射频模块需要完成2 个功能,包括:①上变频生成射频信号,将中频信号调制到1 575.42 MHz;②生成诱骗设备需要的多种频率源[10]。
上变频设计框图如图4 所示。
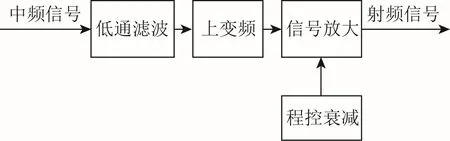
图4 上变频模块
输入的中频信号先需要通过低通滤波器进行滤波,然后上变频,随后经程控衰减,实现对射频功率的控制。
此外,射频模块还需要生成多种频率源,包括一路327.36 MHz 和二路10.23 MHz,用于数仿与信息处理模块使用。
1.3 本地时与系统时同步设计实现
本设计中,由本地接收机提供与系统时同步的PPS 信号和10 MHz 时钟,同步本地时钟与系统时钟;依据前文的信号模型,精确计算所需生成的欺骗信号的各状态参数,通过高阶DDS 技术生成参数精确的欺骗信号,使欺骗信号在目标处与真实卫星信号状态一致。此时欺骗信号能够在不被识别的前提下,进入目标跟踪环路。设备能够根据当前的时钟源状态自主切换合适的时钟:当能够接收外部信号时,会锁定外部时钟;当外部时钟缺失时,设备自动切换到内部时钟,以保持设备的正常运行。
内置接收机输出的外部时钟源10 MHz 时钟在接入射频模块后,与本地时钟源通过锁相环实现同步,然后产生多路频率源,如图5 所示。
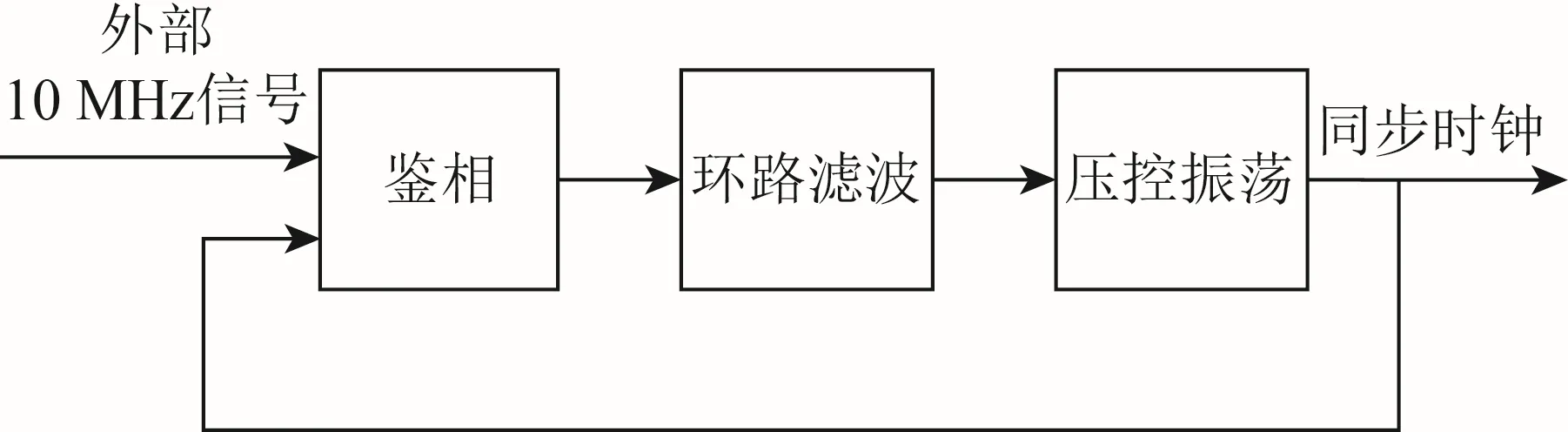
图5 本地时钟驯服环路
1.4 功率入侵方法
欺骗信号针对目标源的诱导可分为 2 个阶段:第1 阶段输出的欺骗信号和卫星信号的状态同步[11];第2 阶段是动态调整阶段,欺骗信号需要逐步引导目标源的位置速度信息,完成对目标源的诱导控制[12-14]。本文中,根据欺骗信号功率调整策略,分为低功率和高功率调整策略。
1.4.1 欺骗信号低功率调整策略
欺骗信号低功率调整策略:在状态同步阶段,欺骗信号功率较低,不超过卫星信号,而欺骗信号的信号参数与真实卫星信号误差能够控制在满足要求的范围内;欺骗信号在不被识别的前提下,潜入无人机的跟踪环路,然后在动态调整阶段增加欺骗信号输出功率;当欺骗信号输出功率高于卫星信号功率后[15],欺骗信号将获得目标源的主导权,随后根据设定的欺骗轨迹逐步调整欺骗信号的信号状态,完成对目标源的俘获控制。调整过程如图6 所示。

图6 欺骗信号低功率调整示意图
1.4.2 欺骗信号高功率调整策略
高功率欺骗信号调整策略:第1 阶段发射高功率欺骗信号,高于卫星信号功率,由于欺骗信号与真实卫星信号的载波相位难以精确同步,因此高功率调整可以避免在欺骗信号与真实卫星信号功率一致时,载波相位反向引起的环路失锁问题;第2 阶段,同低功率调整策略调整方法一致,实现对目标源的诱导控制。高功率控制策略如图7 所示。
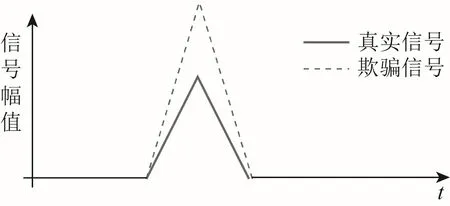
图7 欺骗信号高功率调整示意图
2 实验与结果分析
2.1 欺骗信号功率调整策略测试
使用一款商业接收机测试2 种策略。
2.1.1 欺骗信号低功率调整策略
欺骗信号低功率调整策略:在状态同步阶段,诱骗位置与真实位置一致,速度和加速度为0;初始输出低功率的欺骗信号,随后在第5 秒开始增大欺骗信号功率,读取接收机载噪比输出值。选取其中的22、32 二颗卫星的载噪比值,如图8 所示。
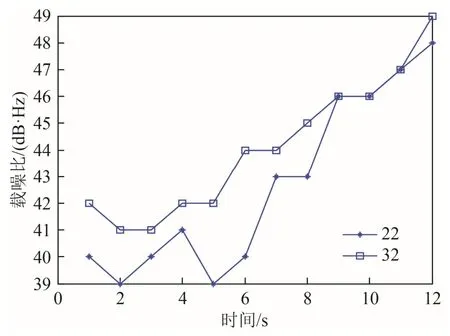
图8 低功率欺骗信号调整策略载噪比测试结果
由图可知:在前4 秒,接收机锁定卫星信号,输出卫星信号的载噪比;从第5 秒开始,逐步增大欺骗信号功率;从第7 秒开始,接收机输出的载噪比值逐步增大,欺骗信号在功率占优时,即可进入跟踪环路,使接收机锁定欺骗信号。
2.1.2 欺骗信号高功率调整策略测试
欺骗信号高功率调整策略:开始不发射欺骗信号时,接收机锁定卫星信号;随后进入动态调整阶段,根据诱导策略调整所仿真的欺骗信号位置速度状态。
在前3 秒不输出欺骗信号,接收机锁定真实卫星信号,记录接收机输出的可见星载噪比值;从第4 秒开始,输出高功率欺骗信号,高于卫星信号的功率15 dB。选取22、32 二颗卫星的记录,如图9所示。
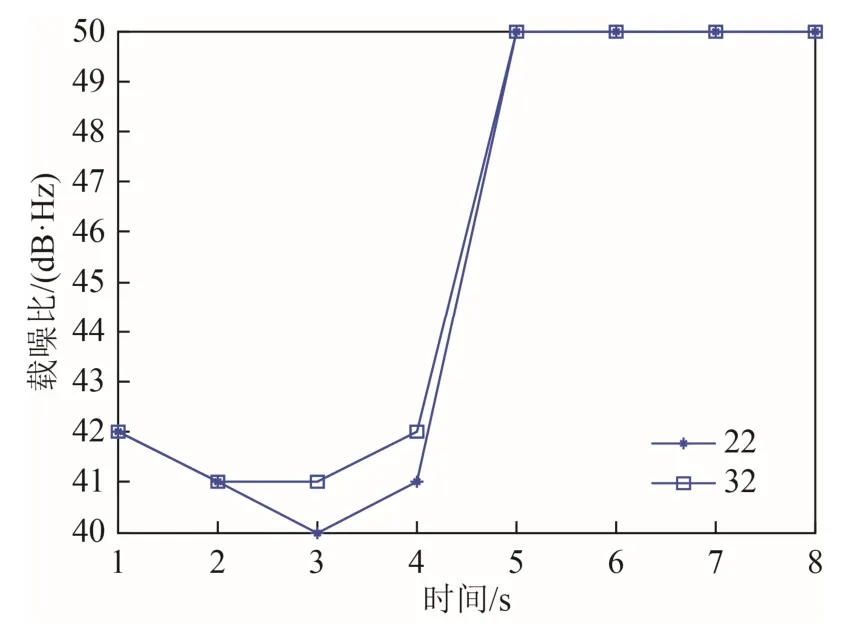
图9 高功率欺骗信号调整策略载噪比测试结果
由图可知:在前3 秒接收机输出的载噪比值趋于稳定;在第4 秒发射欺骗信号后,接收机输出的载噪比值迅速增加,此时接收机锁定欺骗信号,欺骗信号在功率占优时,即可进入跟踪环路,接收机成功被诱导。
2.2 接收机定位测速诱骗实验
第1 阶段调整策略为欺骗信号高功率调整策略;在第2 阶段逐步调整欺骗信号所仿真的位置速度状态,从第 5 秒开始,在地心地固(earthcentered earth-fixed,ECEF)坐标系下,设定欺骗信号加速度0.1 m/s2,初始速度为0,加速度持续时间为10 s,接收机定位结果、真实轨迹与规划轨迹的误差结果如图10 所示,接收机被成功诱骗,输出了规划的位置速度信息。

图10 接收机定位测速结果与预设轨迹速度的比较
2.3 无人机诱骗测试
针对商业无人机展开测试,使用同接收机实验相同的诱导策略。首先使无人机锁定真实卫星信号,并输出定位位置(39.978 63°N,116.344 35°E),然后打开欺骗源,发射欺骗信号,随后调整欺骗信号所仿真的位置速度状态,欺骗信号加速度0.1 m/s2,初始速度为0,加速度持续时间为10 s,读取无人机的位置速度信息,与所仿真的位置速度信息做对比。如图11 所示。
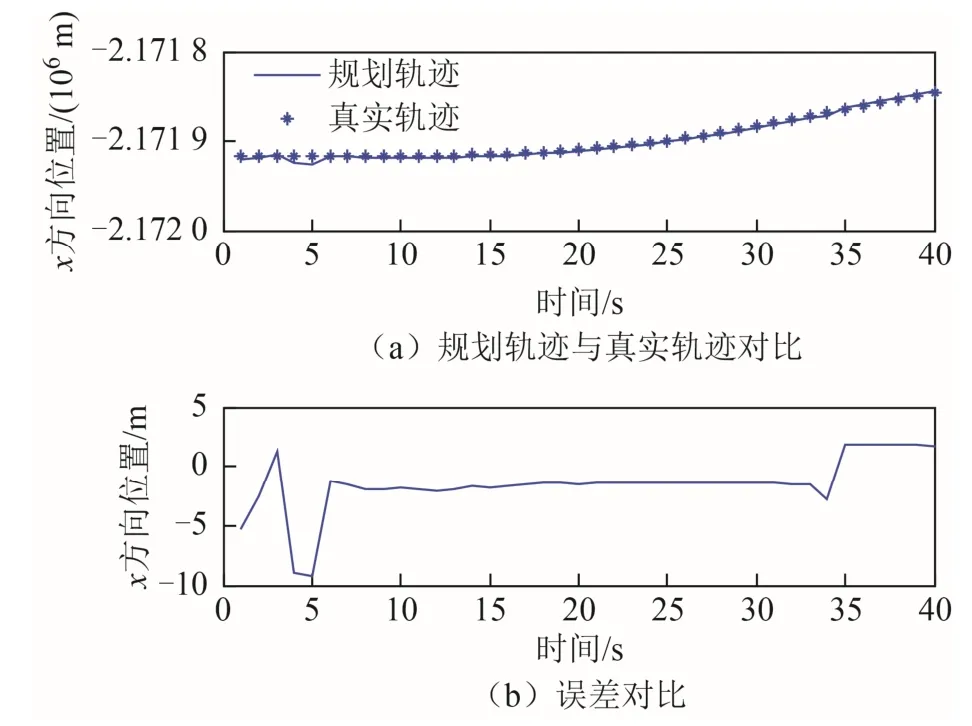
图11 轨迹和偏离起始点的距离
由图可知,无人机在初始阶段锁定真实卫星信号,输出真实位置,从第15 秒开始输出欺骗信号,并逐步改变欺骗信号所仿真的位置速度状态,无人机定位位置发生变化,输出规划的位置信息,无人机锁定欺骗信号,无人机诱导成功。
3 结束语
本文设计实现了针对无人机管控的欺骗干扰源,给出了生成式欺骗干扰源的信号模型,并分析了参数的具体计算方法;给出了硬件设计方案,并通过接收机和无人机验证了欺骗干扰源的信号模型的正确性以及干扰源的功能完备性。
给出了本地时钟与系统时同步的具体设计方案,通过一款授时型接收机,提供驯服后的PPS 信号和10 MHz 时钟信号,实现了本地时钟与真实卫星系统时的同步,可精确控制信号仿真时间,用于信号状态参数的计算。并给出了2 种欺骗信号控制策略,对2 种控制策略进行了定性分析,最后针对2 种调整策略进行了测试。
本文设计的无人机欺骗干扰源,针对接收机和无人机的诱骗实验都能够实现诱骗俘获;但由于无人机导航系统较为复杂,包含多个导航系统,因此目前尚未实现对无人机的定点诱骗,后续须针对定点诱骗展开进一步研究。此外无人机诱骗需要对无人机的控制环路进行切断,使无人机处于自主控制状态,才能通过诱骗实现对无人机的控制。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2022年7期)2022-08-06
无人机(2022年3期)2022-05-20
导航定位学报(2022年1期)2022-02-17
计算机仿真(2021年2期)2021-11-17
汽车与运动(2021年11期)2021-03-22
科学与信息化(2020年20期)2020-10-12
中国电气工程学报(2019年18期)2019-10-21
科技创新导报(2016年30期)2017-03-15
科教导刊·电子版(2016年15期)2016-06-25