
蓝疆号起重船吊装组块作业适用性
2021-07-07 06:57骆寒冰盛世民白晓东
中国海洋平台 2021年3期
骆寒冰, 盛世民, 白晓东, 罗 晓
(天津大学 船舶与海洋工程系, 天津 300350)
0 引 言
起重船在海上吊装海洋平台上部组块施工作业时,在风、浪、流作用下,系泊-船体-吊物系统耦合运动特性复杂。鉴于海上施工成本高昂,准确预报吊物的运动响应、判断能否正常施工,可有效减少待命时间,提高作业效率和经济效益,并有助于避免危险事故的发生。开展系泊状态下起重船吊装组块耦合运动响应特性研究、探究起重船可作业的海洋环境条件,具有重要的理论意义和工程应用价值。
董艳秋等[1]采用数值模拟方法研究波浪中起重船-吊物非线性运动特性,分析吊物运动和吊索张力的变化。李跃等[2]针对趸船-吊物系统,应用多体动力学理论,分析吊物运动轨迹。王学林等[3]建立锚泊起重船动力学模型,分析规则波下船体的简谐运动及吊物的运动特性。顾永宁等[4]应用SESAM软件预报波浪下蓝疆号起重船-吊物系统运动响应,研究吊索附加动力载荷。汪娟娟等[5]通过MOSES软件对系泊起重船-吊物系统的运动进行模拟,分析吊物和船体的运动规律。HAM等[6]针对起重船-吊物系统,利用多体动力学理论,采用离散欧拉-拉格朗日方法,开展数值模拟研究。为有效验证数值模拟结果,指导实际施工,骆寒冰等[7]和朱绍华等[8]对系泊蓝鲸号起重船-吊物的耦合运动响应进行数值模拟和模型试验对比,分析起重船与吊物的耦合运动规律,讨论吊物参数变化对系统耦合运动的影响。
国内外学者对起重船及吊物的运动响应开展的数值模拟较多,但物理模型试验研究较少。针对我国特定海域下典型起重船与吊物的耦合运动响应研究较少,对于起重船在我国海域作业的可行性及适用范围缺乏深入了解,难以有效指导起重船实际吊装作业。本文针对蓝疆号起重船在东海某海域实际施工情况,探究蓝疆号在作业工况下的运动特性,通过模型试验和数值模拟的方法,对系泊起重船-吊物系统耦合运动特性开展研究。结合我国东海海况特点,依据起重船作业指导规范,考虑到实际作业通常选择顶浪海况,对蓝疆号在顶浪下吊装作业的适用性进行分析,对指导蓝疆号起重船吊装安全施工具有重要的参考价值和指导意义。
1 数值模拟方法和水池模型试验
1.1 数值模拟方法
根据三维势流理论求解系泊起重船-吊物系统的频域运动特性,建立时域运动方程为

(1)

数值模拟应用MOSES[9]水动力软件,其中二阶波浪力分析采用Newman近似法[10]。系泊起重船-吊物系统的模型如图1所示。系泊系统布置如图2所示,图2中P1~P4为左舷系泊缆,S1~S4为右舷系泊缆。

图1 起重船-吊物系统数值模型

图2 系泊系统布置数值模型
1.2 水池模型试验
试验在天津大学港口与海洋工程水池进行,水池长宽深尺寸为55.0 m×24.0 m×1.8 m。缩尺比为1∶60,试验水深为1.33 m,对应原型水深为80 m。起重船和上部组块参数如表1所示。模型试验现场如图3所示。

表1 起重船和上部组块主要参数
利用NDI公司的OPTOTRAK Certus非接触式光学系统测量船体和组块两个刚体的运动响应,最高精度为0.1 mm。采用微型拉力传感器测量8根缆绳的受力,传感器安装于缆绳与导缆孔间,量程为2 kg,精度为2 g。

图3 蓝疆号船模试验现场
通过静水衰减试验得到系泊船舶典型自由度运动的固有周期,如表2所示。换算成实船结果的数值模拟与模型试验系泊系统纵向刚度位移曲线如图4所示。
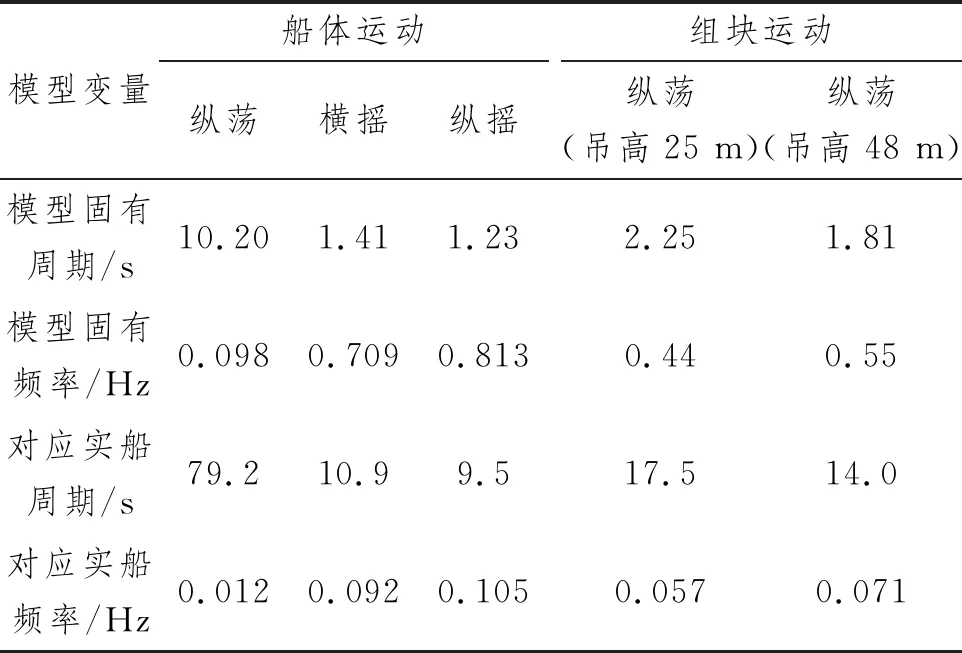
表2 船体和组块固有周期
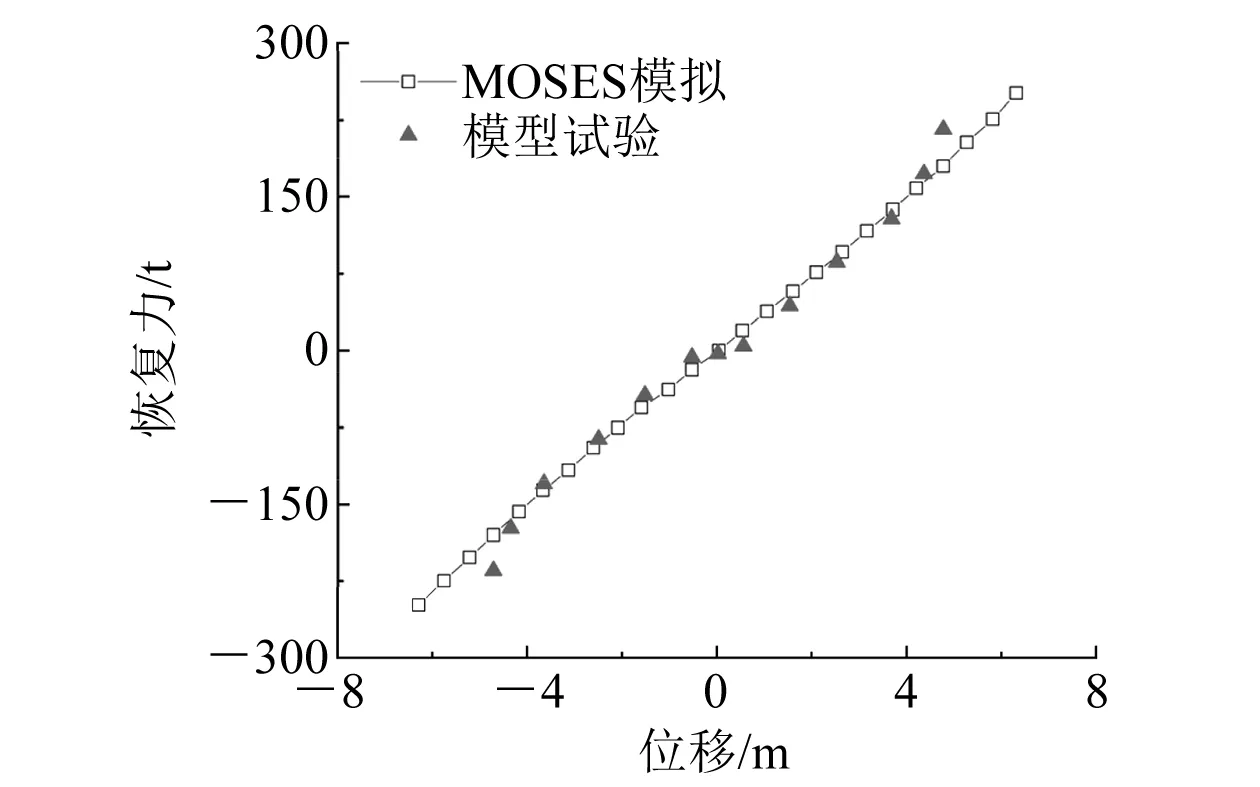
图4 刚度位移曲线
2 典型工况结果对比
对比不规则波下系泊船体和组块运动数值与试验结果。不规则波选取JONSWAP波浪谱,有义波高Hs为1.5 m,谱峰系数为1.0,谱峰周期Tp分别取8.5 s和11.5 s两个顶浪波浪工况。选取3 000 t吊物组块,组块重心距离水面高度为25 m。
统计船体和组块纵向运动的三一峰峰值,对比结果如图5和图6所示,两者吻合较好。船体纵摇和垂荡运动随谱峰周期的变大呈现增加的趋势,而船体纵荡随谱峰周期变大呈现减少趋势;纵荡在Tp=8.5 s时及纵摇在Tp=11.5 s时相差略大,约30%,其余结果误差在20%以内。组块纵荡和垂荡运动随谱峰周期的变大呈现增加的趋势,相差在15%以内。
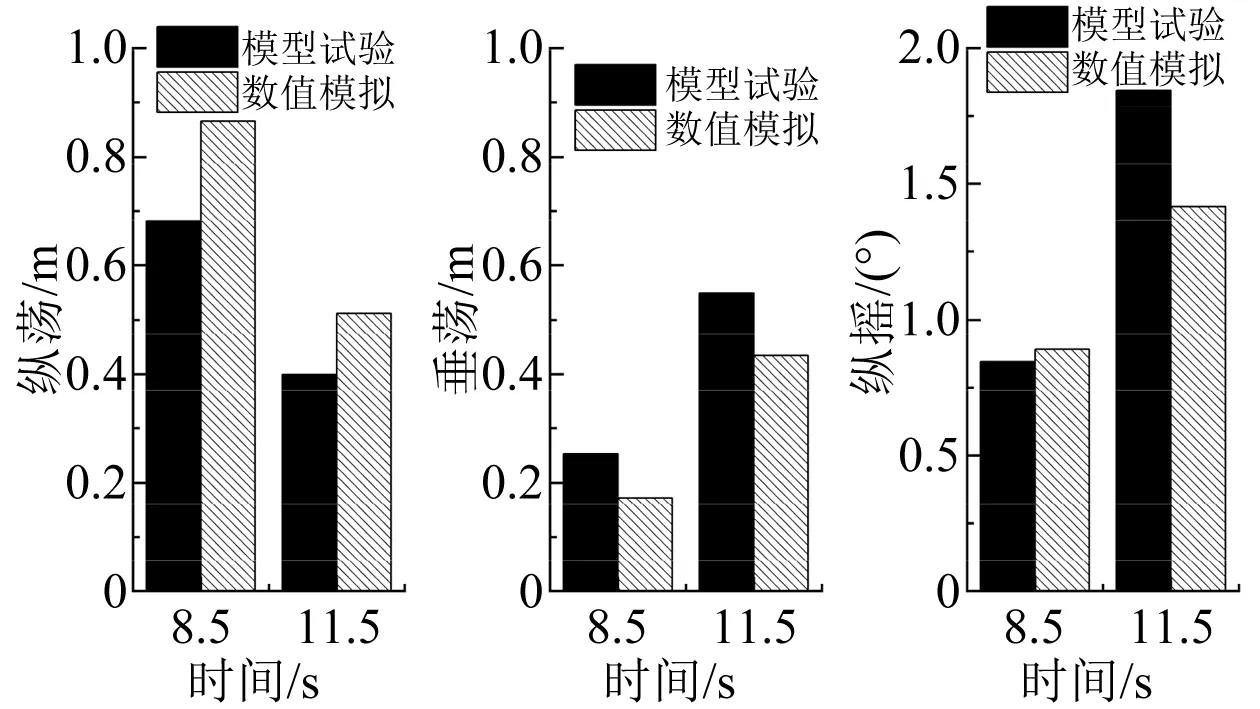
图5 船体运动试验与数值模拟结果对比

图6 组块运动试验与数值模拟结果对比
选取谱峰周期为11.5 s的典型工况,对运动时域结果进行频谱分析,如图7和图8所示。组块纵荡运动频谱中有2个运动频率峰现象,其中:主要成分是高频的,峰值频率在0.087 Hz左右,这是波浪谱峰频率,表明此时组块纵荡运动主要是由Tp=11.5 s的不规则波浪激励引起的;另外一个成分是低频的,峰值在0.012 Hz附近,查表2可知,这是系泊船体纵荡运动固有周期的频率,也就是由船体纵荡二阶运动引起的。与高频成分相比,低频成分对运动的影响较小。组块垂荡运动只有1个频率峰,其频率主要集中在波浪频率0.087 Hz附近,也就是说垂荡运动主要是由不规则波浪激励引起的。图7和图8表明,数值模拟与模型试验结果在谱峰周期、谱峰数值及其总体分布方面吻合较好。
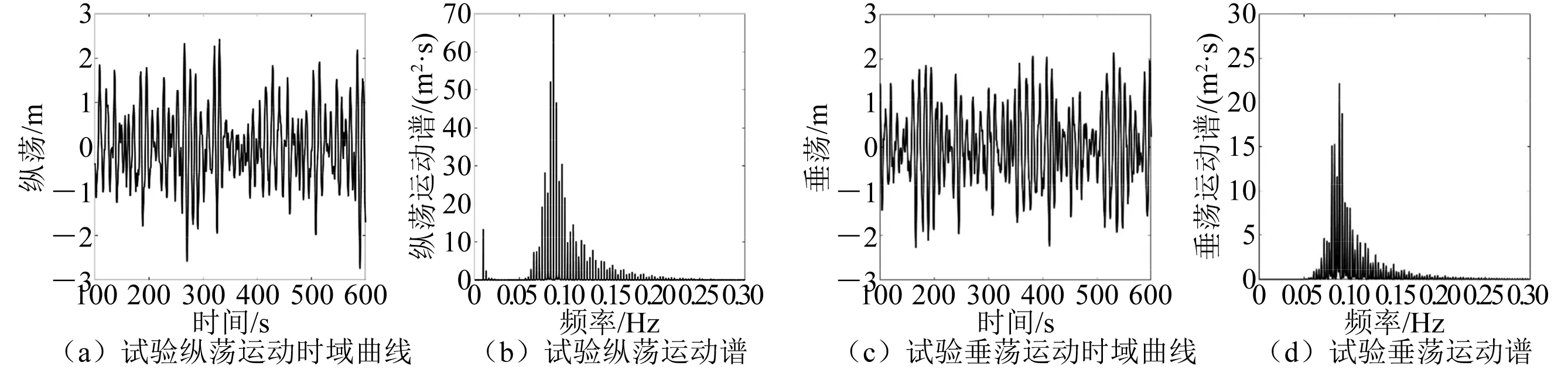
图7 组块纵荡和垂荡典型试验结果
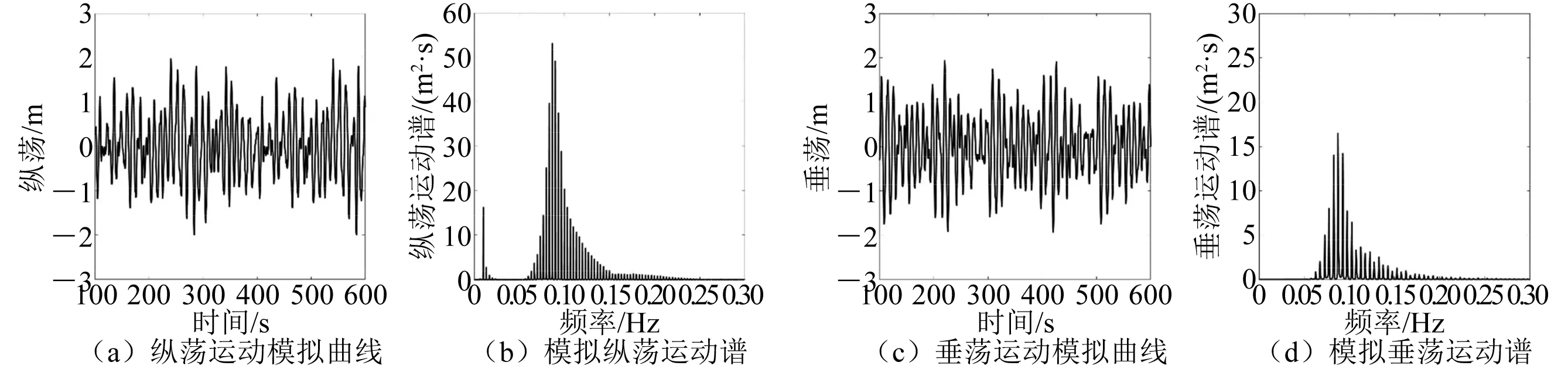
图8 组块纵荡和垂荡典型数值模拟结果
3 起重船-吊物系统运动响应敏感性分析
采用数值模拟方法对起重船吊物系统耦合运动响应进行敏感性分析。取3种重量的吊物组块,考虑到蓝疆号起重船最大起重重量为3 800 t,取最大重量为3 000 t;3个不同吊高,其中,25 m为走船高度,35 m为从驳船起吊高度,45 m为套井口高度;结合东海波浪环境条件,不规则波谱峰周期选10个,有义波高选7个,具体参数选择如表3所示,共630组工况。不规则波数值模拟时间长度为3 h。统计起重船和组块的纵向运动,由于吊装施工时最关心吊物运动,主要讨论组块运动响应结果。

表3 敏感性分析工况参数
分析发现不同吊重的组块在相同吊高下的运动规律相似,选取3 000 t组块在不同吊高下结果进行分析,组块运动百一幅值随波高和周期变化的统计结果如图9和图10所示。

图9 3 000 t组块纵荡运动敏感性分析

图10 3 000 t组块垂荡运动敏感性分析
由图9可知:当不规则波谱峰周期Tp<12 s时,组块纵荡运动幅值相对较小,纵荡随波周期增大而显著增大;当Tp>12 s时,对于25 m和35 m吊高,随周期增大组块纵荡变化不大,但是,吊高45 m时纵荡随周期增大仍然呈现显著增大趋势。对比不同吊高下的纵荡运动,发现吊高越大组块的纵荡运动幅值越大。
组块垂荡运动随谱峰周期呈现先增大后平缓变化的趋势:当Tp≤8 s时,垂荡对周期变化较为敏感,垂荡随周期增大而显著增大;当Tp>8 s时,垂荡对周期的变化不敏感,垂荡随周期增大变化不明显。对比不同吊高下的垂荡运动,发现组块垂荡运动幅值随吊高增大变化不显著,随吊高增大而稍有增大。同时,对比不同波高下组块纵荡和垂荡运动,发现组块运动呈随波高增大而线性增大的趋势。
4 顶浪下蓝疆号起重船吊装适用性分析
基于第3节对蓝疆号起重船-吊物系统运动响应数值模拟结果,开展顶浪下的适用性分析。依据诺布丹顿浮式起重船操作指导性规范[11],浮式起重船推荐可工作条件如下:组块垂向运动最大位移幅值不超过±0.75 m,水平向运动最大位移幅值不超过±1.50 m。对1 000 t、3 000 t重量的组块工作工况进行整理。
在组块吊装作业时,取纵荡和垂荡运动响应的百一值幅值表示为其最大值,1 000 t、3 000 t组块适用性分析结果分别如图11和图12所示,其中阴影部分表示该运动满足诺布丹顿的要求。

图11 蓝疆号起重船起吊1 000 t组块适用性结果

图12 蓝疆号起重船起吊3 000 t组块适用性结果
通过上述分析,适用性结果如下:在谱峰周期在6 s以内、有义波高小于2.00 m海况下,蓝疆号起重船吊装作业安全;当谱峰周期在6~8 s时,可在有义波高小于0.75 m的海况下安全起吊组块;当谱峰周期在8~10 s时,可在有义波高小于0.50 m的海况下对组块进行吊装作业;当谱峰周期大于10 s时,仅在谱峰周期为12~14 s的个别特殊海况和吊高下可对1 000 t组块可作业,而对于3 000 t组块则完全不可以作业,此时不推荐作业。
可见,起吊1 000 t和3 000 t组块工况结果适用性类似,随波浪谱峰周期的增大,蓝疆号起重船顶浪下吊装组块的适用海况明显减少,在施工作业时需特别重视长周期涌浪的影响。
5 结 论
采用数值模拟和物理模型试验方法,对比顶浪不规则波工况下蓝疆号起重船吊物系统的耦合运动响应特性,验证数值模拟方法的可行性及其精度。通过大量数值模拟工作,讨论起重船吊物运动对波高、周期、吊高和吊物重量变化的敏感性。
结合我国东海海况,根据浮式起重船作业规范,研究蓝疆号起重船施工作业的可行性。蓝疆号起重船顶浪吊装时,波浪周期对作业影响非常明显。当波浪谱峰周期Tp≤6 s时,在有义波高Hs<2.00 m海况下,吊装不同重量吊物作业安全;当6 s
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
分析科学学报(2021年3期)2021-07-14
中国海上油气(2021年2期)2021-06-09
色谱(2021年6期)2021-05-06
科技资讯(2020年12期)2020-06-03
空天防御(2020年1期)2020-04-13
海洋工程装备与技术(2017年5期)2017-03-05
中国海上油气(2016年1期)2016-06-09
电子设计工程(2014年17期)2014-02-27
长春大学学报(2013年4期)2013-08-15
