
基于水深截断的深水系泊系统计算
2021-07-07 03:50刘旭平杨小龙董宝辉毛程亮
中国海洋平台 2021年3期
杨 光, 刘旭平, 杨小龙, 董宝辉, 毛程亮
(海洋石油工程股份有限公司, 天津 300461)
0 引 言
随着海上油气勘探和开采技术不断进步,海洋油气生产设施的可适应水深不断增加。深水海洋浮式生产设施常用的定位方式为系泊定位系统和动力定位系统。系泊系统具有投资相对较少、使用可靠性较高、经验相对成熟的优势,是业界优先考虑的定位系统,并广泛应用于深水海洋浮式平台。深水系泊系统在整个工程投资中占比较大,是深水海洋浮式平台关键技术的研究重点。
深水海洋浮式平台服役期一般为25 a,其间可能遭遇恶劣海况,系泊系统是其生存的重要保证。深水系泊系统的设计工作可分为数值设计和模型验证两大块。国际通用的计算软件可计算海洋平台在特定海况下的运动和受力情况,并且大多数情况的计算结果与模型试验结果比较吻合。工业界认为设计方案需要通过物理模型的验证才较为可靠,并以此作为最终设计、建造的依据[1]。
1 水深截断模型试验方法
面对海洋平台作业水深的不断增加,在现有水池尺度确定的情况下,若按照全水深模拟深水作业海况,则选用的缩尺比会较小,试验结果的精度难以保证。为避免缩尺比过小带来的弊端,一般可选取水深截断模型试验方法。
早期发展的被动式混合模型试验仅进行水深截断系统的等效设计和水深截断的模型试验,并根据试验结果直接预测实际海洋平台的水动力性能。但是,若水深急剧增加,则水深截断与全水深的差别越来越大,试验结果不一定可靠。为尽可能减小差异,国际拖曳水池会议(ITTC)提出在截断模型试验的基础上,采用时域耦合数值计算软件,引入后处理数值计算过程,包括数值重构计算和数值外推计算[2]。水深截断系泊系统设计流程如图1所示。

图1 水深截断系泊系统设计流程
2 水深截断模型参数
2.1 目标平台、环境条件及系泊系统
以某深水海洋半潜式钻井平台为例,环境水深为1 500 m。表1为该平台的主要环境参数。船型为双浮体、四立柱、箱型封闭式平台,对称于中纵剖面及中横剖面。平台主尺度:主船体为74.42 m×74.42 m×8.60 m;立柱为17.40 m×17.40 m×21.46 m;浮箱为114.00 m×20.12 m×8.54 m;浮箱间距为58.60 m;主甲板高度为38.60 m;井架为70.00 m。

表1 某半潜式平台主要环境参数
该平台全水深系泊系统采用12根组合式锚索,锚缆采用链-缆-链组合形式,预张力为1.5 MN。与平台连接段为直径84 mm的R5有档锚链,中间段为直径89 mm的钢丝绳,与锚连接段同样为直径84 mm的R5有档锚链。全水深锚缆主要参数如表2所示。系泊布置及环境力方向如图2所示。
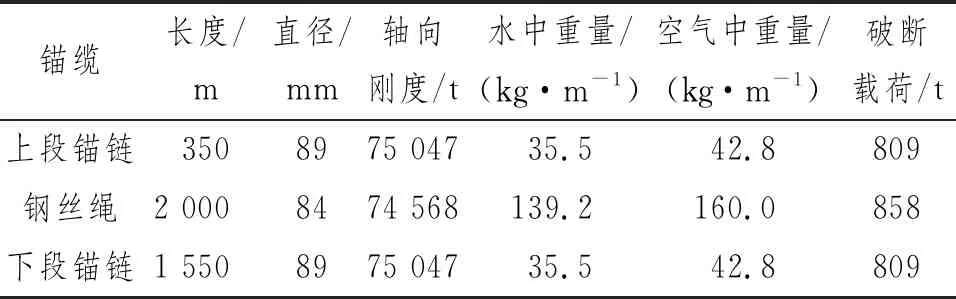
表2 全水深锚缆主要参数
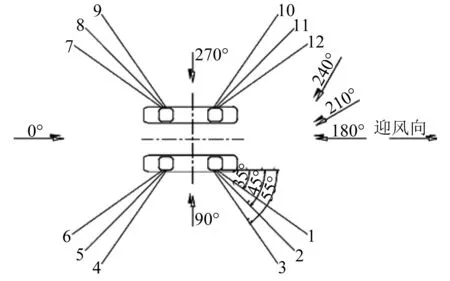
图2 系泊布置及环境力方向
2.2 600 m等效水深截断的系泊设计
综合考虑水池模型试验的缩尺比定为1︰60,水深截断为10 m,相应于目标平台水深截断为600 m的模型试验。根据相应等效截断原则[3],得到等效水深截断锚缆参数,如表3所示。

表3 600 m等效水深截断锚缆参数
3 数值计算分析
3.1 数值重构的计算模型
对于深水系泊系统计算分析,已有一些较成熟的专业软件可应用。由挪威船级社(DNV)出品的船舶与海洋结构物分析软件SESAM功能强大,HydroD模块可用于平台水动力的分析模拟,Deep C模块专门针对平台及锚系的耦合问题进行求解,被证明分析结果可信度较高[4]。采用该软件作为计算分析工具。
应用软件建立目标平台在600 m工作水深下的水动力模型(见图3),包括平台的湿表面模型和质量模型。通过软件求解得到平台在单位波高下的频域运动响应和附加质量、阻尼系数等水动力参数。根据频域分析结果,通过系泊缆数值模拟,以截断模型水池试验特征值作为调整目标,调整目标平台或系泊缆的水动力参数,反复试算,最终使目标平台的运动和受力等数值重构的计算结果与截断试验结果基本一致。图4为水深截断系泊系统模型。
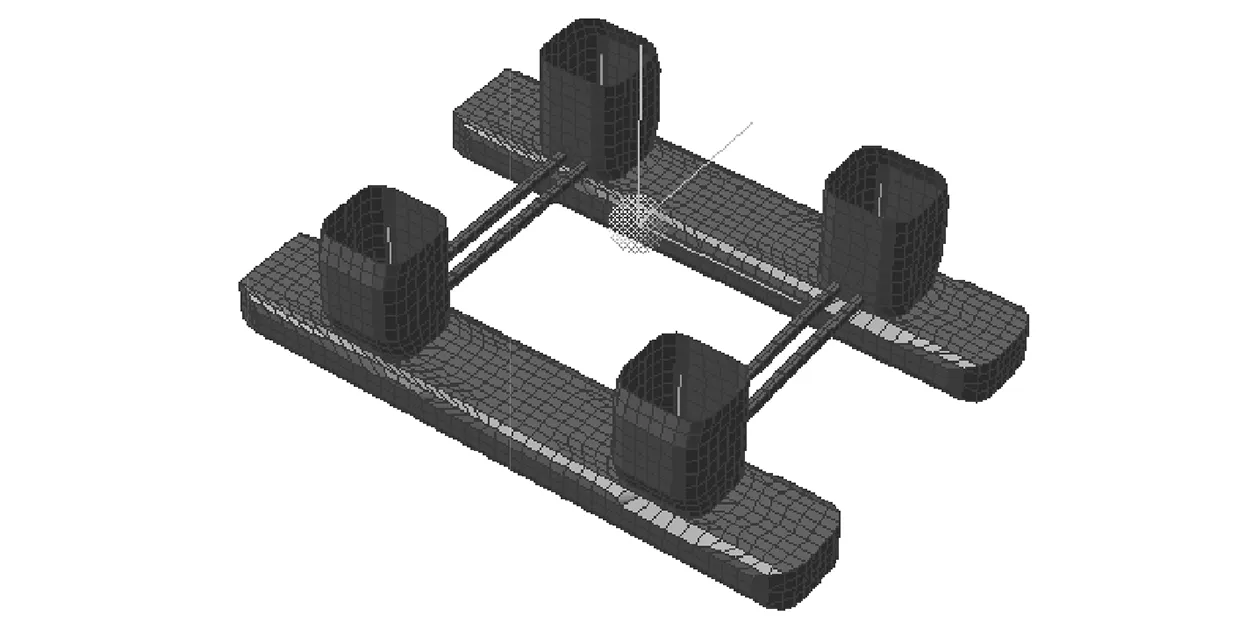
图3 目标平台600 m工作水深的水动力模型
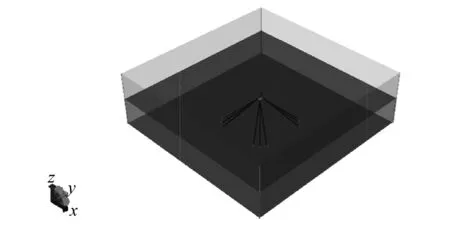
图4 水深截断系泊系统模型
3.2 截断模型试验与数值重构对比分析
应用软件对目标平台的水动力模型进行求解,求得平台在单位波高下的频域运动响应和附加质量、阻尼系数等水动力参数。利用频域分析结果对目标平台及其系泊系统进行非线性时域耦合分析。图5和图6为目标平台在作业工况和生存工况下180°环境力方向主要运动响应(纵荡、垂荡、纵摇)的对比数据。由图5和图6可知:截断试验与数值重构模型的运动响应趋势及幅值吻合较好;在波频范围内,垂荡运动的响应峰值出现在21.0 s左右;纵摇运动的响应幅值较小,峰值出现在12.0 s左右。
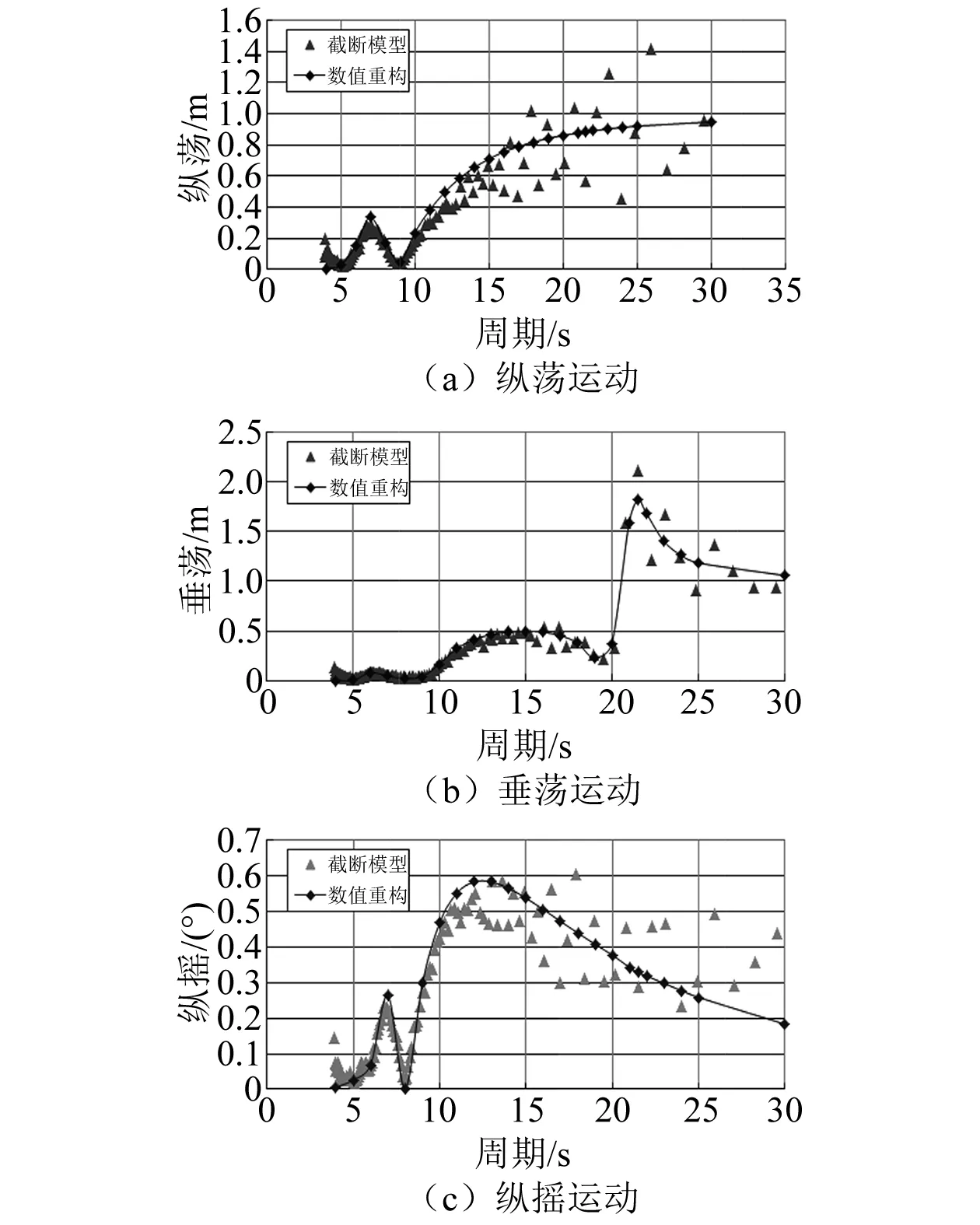
图5 在作业工况下180°环境力方向运动响应

图6 在生存工况下180°环境力方向运动响应
图7和图8分别为目标平台在作业工况和生存工况下180°环境力方向系泊系统的水平回复力特性曲线。
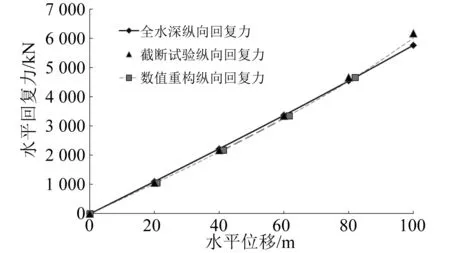
图7 在作业工况下180°环境力方向系泊系统的水平回复力特性曲线
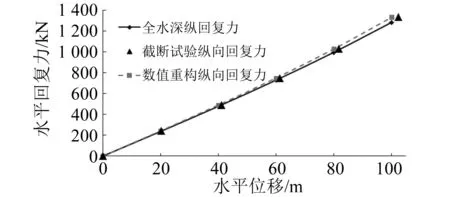
图8 在生存工况下180°环境力方向系泊系统的水平回复力特性曲线
由图7和图8可知:在作业工况下,当水平回复力小于5 000 kN时3组系统的水平位移相近,当水平回复力超过5 000 kN时全水深的水平位移稍大;类似规律也出现在生存工况下。
表4为目标平台在作业工况下截断试验与数值重构的纵荡、横荡、垂荡等3个主要运动的固有周期和阻尼系数,数据显示截断试验与数值重构的系泊系统固有周期比较吻合。

表4 在作业工况下平台运动的固有周期和阻尼系数
表5列出目标平台在作业工况下各环境力方向(180°、135°、90°)截断试验与数值重构的水平位移数据。平台位移的数值模拟结果与试验结果的统计值大多吻合,但90°环境力方向纵荡和180°环境力方向横荡的计算结果比试验结果小很多,原因在于在试验时风浪流方向可能存在少许偏差。
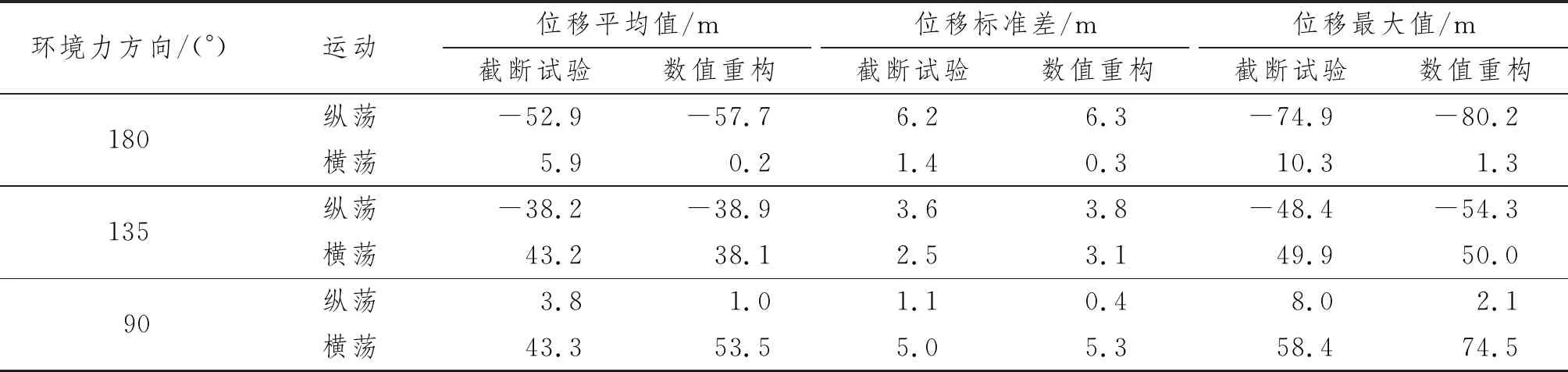
表5 在作业工况下平台各环境力方向的水平位移数据
表6列出目标平台在生存工况下各环境力方向(180°、135°、90°)受力最大锚缆的受力数据。计算结果的平均值和最大值均与试验结果吻合,标准差与试验结果大多吻合。

表6 在生存工况下平台各环境力方向受力最大锚缆的受力数据
对目标平台水动力特性、系泊系统回复力特性、目标平台位移和受力进行分析比较,数值重构计算结果与截断试验测量结果基本一致,经过验证的水动力参数可用于全水深系统的数值外推。
3.3 全水深数值外推计算结果
全水深系统的数值外推基本考虑:在水深截断模型试验与数值重构的数值对比结果基本一致的前
提下,采用同样的时域分析软件建立全水深的平台和系泊缆模型,输入校正过的水动力参数。已得到全水深数值结果目标平台全水深系统的数值外插计算与水深截断系统的数值重构类似,也使用DNV的SESAM软件,采用耦合分析方法。全水深计算结果如表7和表8所示。在作业工况下、180°环境力方向上平台水平偏移最大,为74.6 m,与作业水深的偏移比为4.97%;在135°环境力方向上系泊缆受力达到最大,为3 387.45 kN,安全因数为2.48。水平偏移与系泊缆最大受力均满足美国石油协会(API)规范的相关规定[5]。在生存工况下、135°环境力方向上系泊缆受力最大,为3 779.59 kN,安全因数为2.23,满足API规范的相关规定[5]。
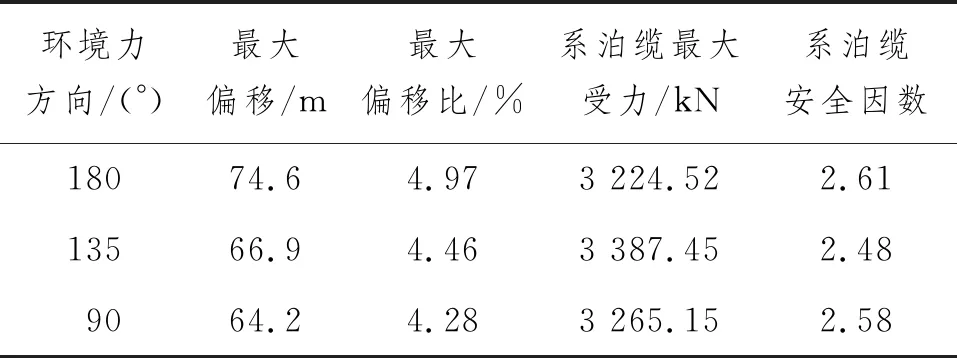
表7 在作业工况下位移和系泊缆受力数据
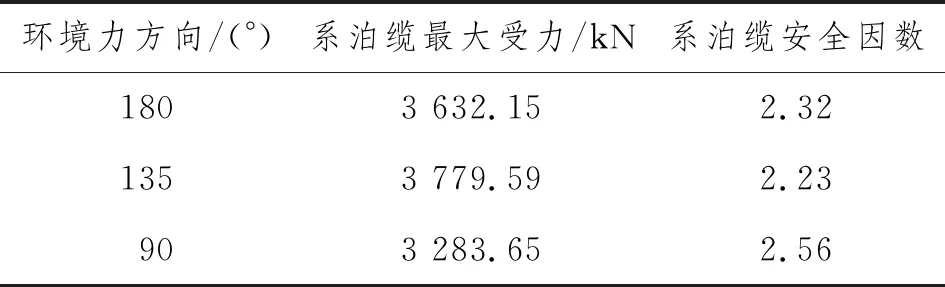
表8 在生存工况下系泊缆受力数据
4 结 论
以工作水深为1 500 m的某深水海洋半潜式钻井平台为目标平台,根据其600 m等效水深截断试验结果,对其进行数值重构对比分析,验证水动力参数,对其运动响应和系泊系统进行评估,结论如下:
(1) 600 m等效水深截断可较好地模拟1 500 m全水深系泊系统的水动力特性,如回复力刚度、固有周期等。
(2) 通过调整水动力参数,可实现数值重构计算结果与截断试验结果基本一致。
(3) 经数值重构得到的水动力参数可作为深水海洋浮式平台运动及系泊系统计算分析的依据。
(4) 基于等效水深截断的系泊系统设计方法满足工程要求,可用于深水系泊系统的初步设计。
猜你喜欢
河北水利(2022年10期)2022-12-29
舰船科学技术(2022年20期)2022-11-28
海洋通报(2022年4期)2022-10-10
山东冶金(2022年2期)2022-08-08
海洋信息技术与应用(2022年1期)2022-06-05
航空发动机(2020年3期)2020-07-24
西南交通大学学报(2016年6期)2016-05-04
工业设计(2016年11期)2016-04-16
采矿与岩层控制工程学报(2015年3期)2015-12-16
浙江国土资源(2015年4期)2015-05-09
