气体绝缘开关X射线三维成像检测系统的研制及应用
2021-06-08 03:07张丽萍卢启付
无损检测 2021年5期
张丽萍,石 泉,卢启付,钟 飞
(1.广东电网有限责任公司, 广州 510080;2.南方电网电力科技股份有限公司, 广州 510080)
全封闭结构的电网设备如GIS(气体绝缘开关)、断路器等作为变电站广泛使用的设备,其安全和可靠性至关重要。操作开关时的静电力的作用、分合闸不到位引起的接触不良、异物碎屑的移动、触头烧损、螺丝松动、结合不到位、结构变形、绝缘老化等现象都对设备的安全运行有着严重的影响。2012年广东电网公司发生GIS故障5起,SF6(六氟化硫绝缘气体)瓷柱式断路器故障7起;2013年广东电网10 kV及以上高压开关设备共发生重大事故923次。
X射线三维成像检测是一种数字化、智能识别采集图像、检测精度高、能直观显示切片并区分开重叠部件的先进技术,适合电网设备的现场检测。其对于提高全封闭电网设备技术的监督能力,维护电力设备的安全稳定运行有着特别重要的意义。
目前,二维数字X射线检测技术广泛用于GIS检测[1-2],但是其难以区分盆式绝缘子的重叠影像,难以判断盆式绝缘子是否有缺陷[3-8];回路电阻超标时,难以判断接触是否紧密。GIS体积庞大,成像过程中不能旋转也不能移动,探测器不能覆盖扫描整个物体,造成投影数据在探测器方向上的截断,导致采集到的投影数据不完备,无法满足精确重建的要求[9]。应用普通的重建方法来对不完备数据进行重建,常会得到无法重建或者重建质量非常差的结果[10-11]。笔者研制了针对GIS的X射线三维成像系统,包括机械、运动控制、数据采集、图像重建、三维图像显示等子系统。设备的扫描方式为面阵探测器锥束旋转扫描,设备整体精度达200 mm,实际输出断层图的最高分辨率可达3 160像素X3 160像素。笔者研发的技术可以得到实际大小的三维图像,可切片显示,并区分开重叠的影像,可用于盆式绝缘子和回路电阻超标的检测,提高GIS运行的可靠性。实际应用结果表明,电力设备的X射线三维成像检测是可行的。
1 X射线三维成像系统的研制
1.1 功能精度
待检测GIS三视图及模型如图1所示,系统的机械精度如表1所示。
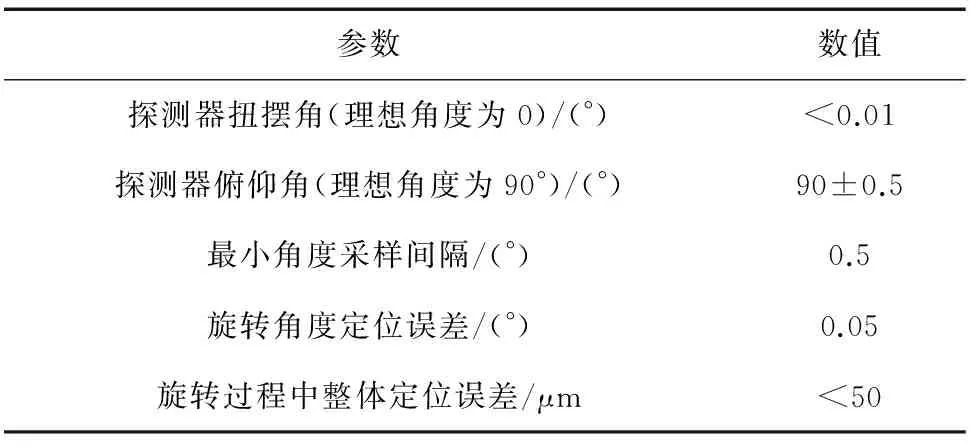
表1 X射线三维成像系统的机械精度

图1 待检测GIS三视图及模型
1.2 硬件选择
GIS的X射线三维成像系统包括机械、运动控制、数据采集、图像重建、三维图像显示等子系统。CT(电子计算机断层扫描)软件系统包括机械控制、探测器采集、DR(数字射线)透照成像、图像重建与显示等4个部分。采用PerkinElmer公司生产的XRD1621型成像板,分辨率为2 048像素×2 048像素,像素尺寸为200 mm,采用SPEKTROFLASH MRXD 300 kV型定向射线机及控制器,电流为1.0 mA5.0 mA,焦点尺寸(长×宽)为2.2 mm×2.6 mm。相对于扇束CT,锥束CT采用平板探测器一次扫描即可完成三维成像,检测速度更快。
X射线三维成像机械装置如图2所示。选用HG-KN-73BJ-S100型伺服电机,额定转矩为2.4 N·m,最大转矩为7.2 N·m,转动惯量(带电磁制动)为1.39×10-4kg·m2,伺服放大器型号为MR-JE-70A(使用220 V单相交流电)。控制器放在地面上,可进行远程操作,通讯方式为485通讯。选用可编程控制器,编程简单,控制精度高,可靠性强,能很好地与上位机进行通讯。
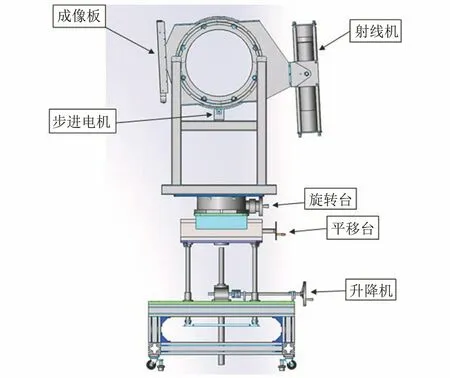
图2 X射线三维成像机械装置示意
1.3 传统的FDK重建算法
CT成像的基本原理为根据Radon变换与反变换所表述的二维函数和射线积分之间的变换关系,得到物质的线性衰减系数。

(1)
式(1)称为Radon变换,其反变换如下

(2)
FDK算法[13](由Feldkamp, Davis和Kress提出的一种基于圆轨道扫描的近似重建算法)属于滤波反投影近似解析算法。文章采用射线源探测器偏置圆周扫描图像重建算法。因为成像目标即3根铝导体不在中心,射线源和探测器相对于旋转中心偏置放置,所以在传统的FDK重建算法的基础上进行了改进。扫描布置如图3所示。GIS外筒直径为500 mm,距离地面2 450 mm,材料为铝合金,壁厚为8 mm。
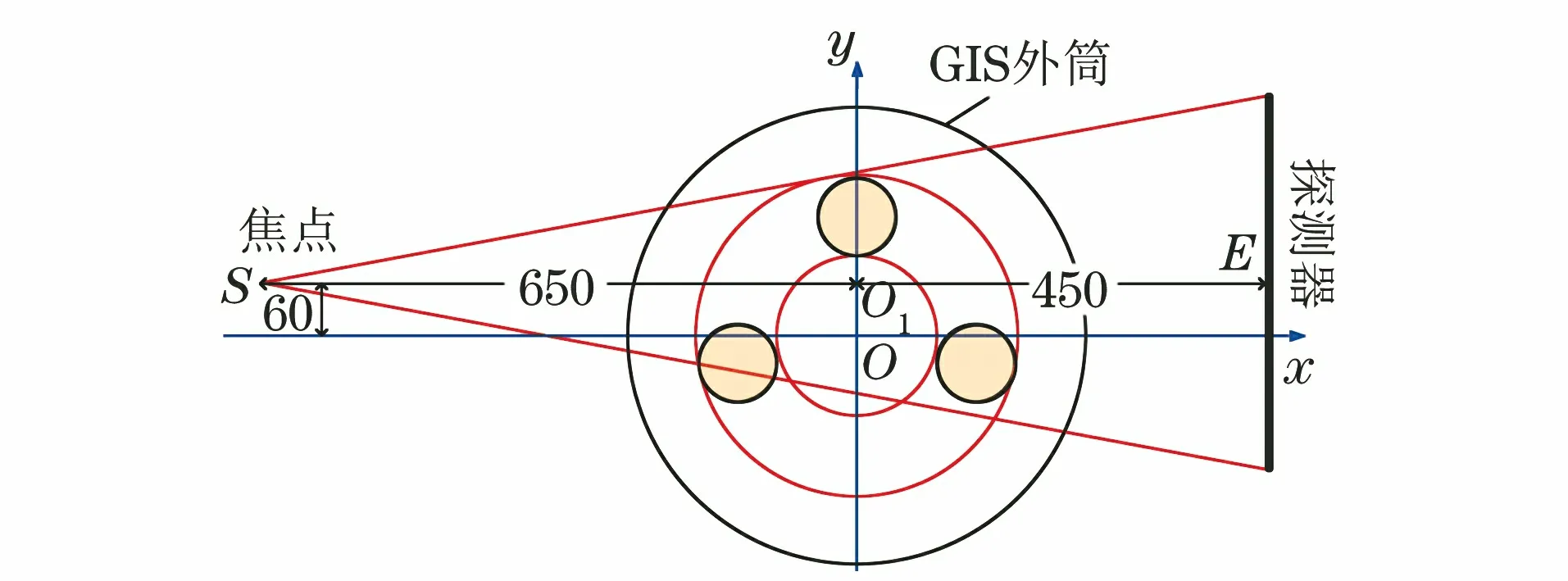
图3 扫描布置示意
1.4 改进的FDK重建算法
射线源和探测器相对于旋转中心偏置放置(见图4)。
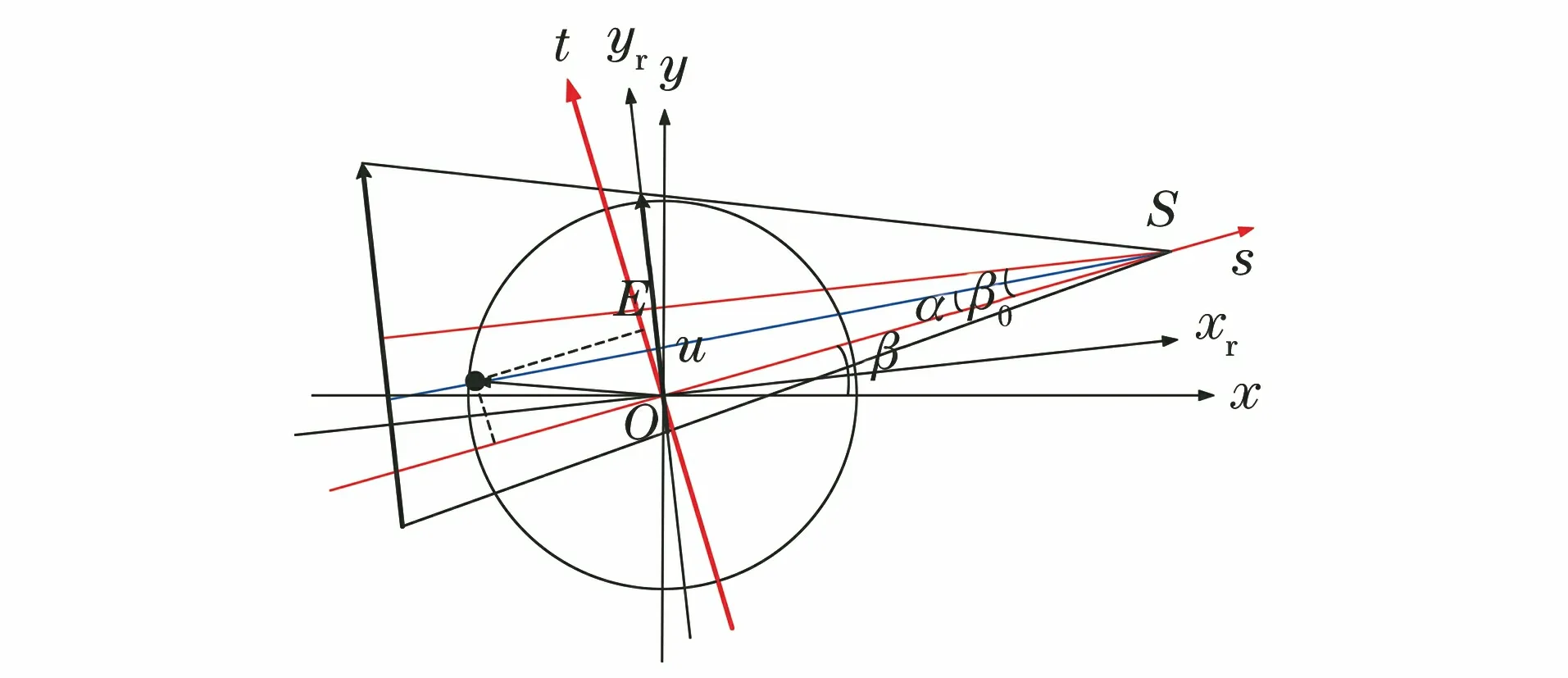
图4 二维中心截面示意
建立固定的坐标系(xOy),假设射线源到旋转中心的距离为LSO,射线源的坐标轨迹为
(LSOcosβ,LSOsinβ)
(3)
式中:β为x轴与SO的夹角。
投影数据表示为g(β,u)(假设探测器过O点,以探测器中心E为原点,u为投影数据坐标),SE与SO的夹角记为β0。假设虚拟探测器所在坐标轴为t,直线OS记为s轴,射线源到探测器中心的距离记为LSE,则射线与虚拟探测器中心线的夹角α为
(4)
射线与t轴的交点坐标t1为
t1=LSOtanα
(5)
改进的FDK算法步骤如下所述。
(1) 以虚拟探测器为参考进行余弦校正。对于面阵探测器,以探测器的中心为原点建立直角坐标系,过E点且与转轴平行的直线记为v轴,则校正公式为
g′(β,u,v)=

(6)
式中:g(β,u,v)为在β角度下采集到的原始数据;g′(β,u,v)为原始数据余弦校正后的结果。
(2) 对投影数据截断的一端进行正弦延拓,假设延拓后数据的长度增加n,则延拓后的数据G(β,u,v)为
G(β,u,v)=

(7)
(3) 使用等间距滤波器进行滤波,滤波器函数h(u)和对延拓数据进行滤波后得到的数据p(β,u′,v)为
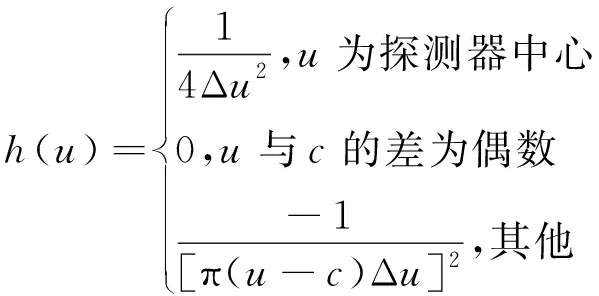
(8)

(9)
式中:u′为u的相关变量;Δu为采样间隔时间;c为探测器中心的坐标。
(4) 仅使用探测器一侧的数据进行反投影,得到数据p(β,u,v)为

(10)
假设重建点的坐标为(x,y,z),其在旋转坐标系下的坐标为(xr,yr,z),则重建数据f(x,y,z)为

(11)
(5) 重建结果可以根据设定的显示窗位和窗宽,通过线性变换映射到[0,255]的灰度区间后,以灰度图像的形式显示。假设选择窗位的值为L,窗宽为W,则对原来的重建结果f[重建数f(x,y,z)的值]进行如下线性映射

(12)
2 X射线三维成像系统的应用
将X射线三维成像系统应用于某供电站GIS的检测,检测现场如图5所示。检测步骤如下所述。
(1) 在空地上搭建检测设备,通过对小钢球的扫描来测试机械系统精度。测试结果为小钢球的球心在图像上离拟合轨迹偏差在1个像素以内,说明设备整体精度达到200 mm。

图5 X射线三维成像系统应用现场
(2) 二维投影成像。典型旋转式扫描二维投影成像如图6所示。在某些角度,两根导体影像可以清楚分辨;在某些角度,两根导体影像重叠在一起,无法分辨是否有缺陷。

图6 典型旋转式扫描二维投影成像
(3) 设置扫描使用的参数,对检测部位进行扫描,如果不能一次完成扫描,中间需要关闭X射线源,冷却合适的时间后再打开射线源继续扫描,多次扫描直至数据采集完毕。经检测,旋转式扫描设备成功采集360幅投影数据。扫描时采用的参数如表2所示。
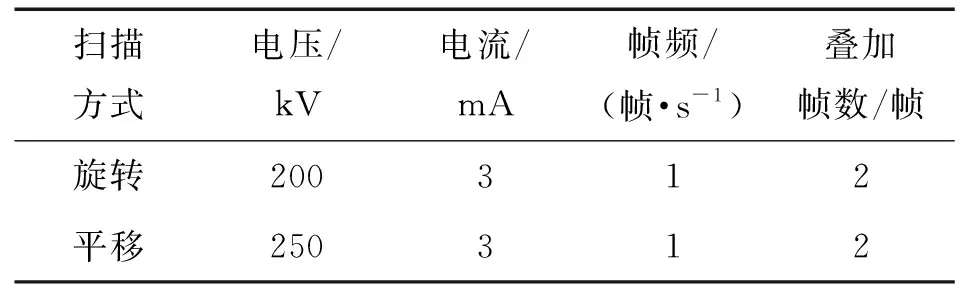
表2 扫描参数设置
(4) 测量旋转式扫描设备的几何参数。对于旋转扫描设备,射线源到探测器的距离为1 100.0 mm,旋转轴到中心射线的距离为69.0 mm,通过计算得到视场区域的直径为373.6 mm。
(5) 使用采集到的投影数据重建断层图像。采用基于图形处理器(GPU)的快速重建技术,基本设计思想是充分利用GPU多处理器的结构特点和单指令多数据的指令执行方式,将锥束CT重建程序部分执行过程中的数据元素映射成多个并行处理的线程在GPU平台上运行,X射线三维成像流程如图7所示(DR为数字X射线摄影)。

图7 X射线三维成像流程
GIS不同层、面的成像结果分别如图8所示,旋转扫描三维成像结果如图9所示。实际输出断层图的最高分辨率可达3 160像素X3 160像素。
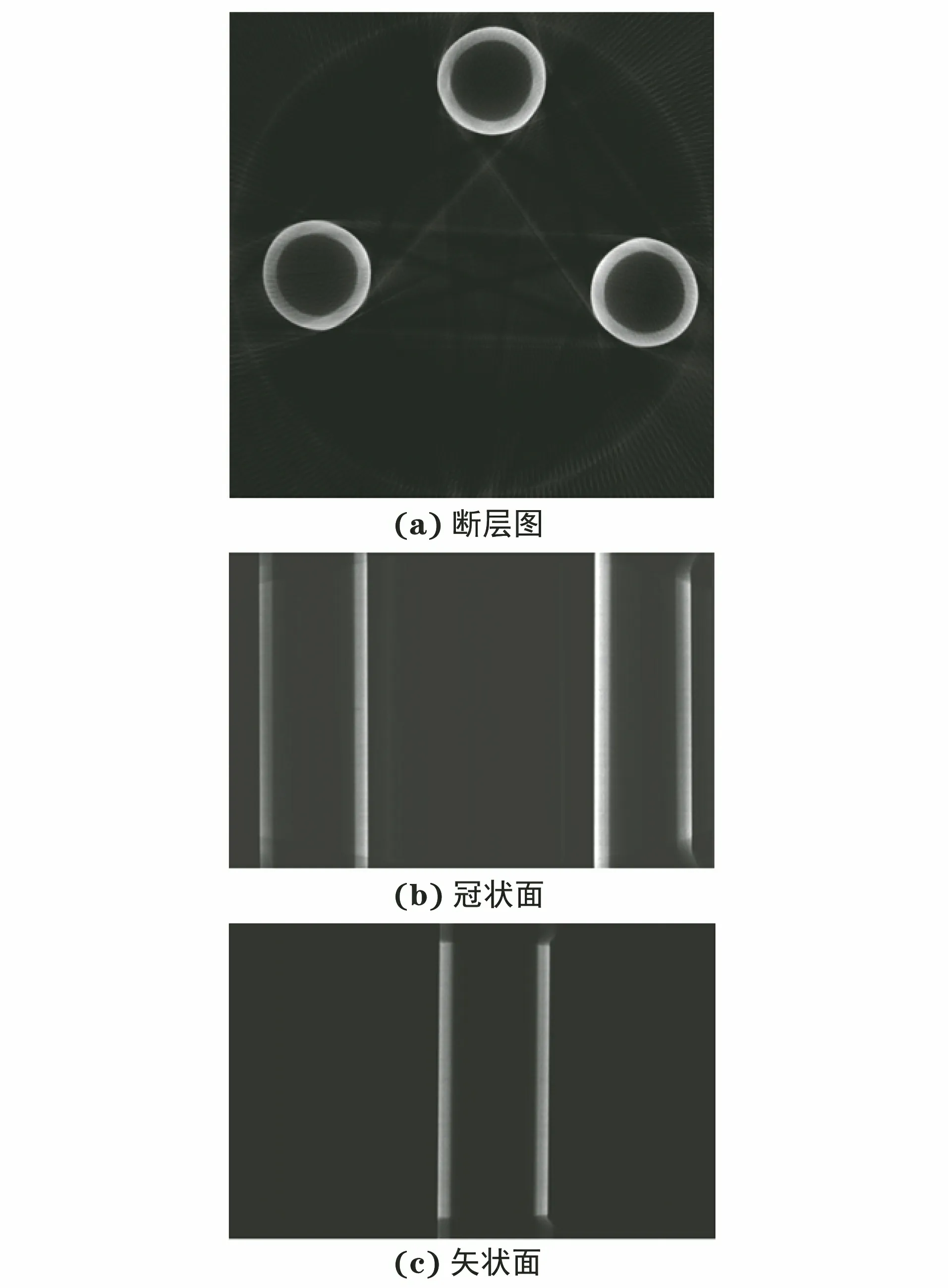
图8 GIS不同层、面的成像结果

图9 GIS旋转扫描三维成像结果
3 结语
研制了针对GIS的X射线三维成像系统,包括机械、运动控制、数据采集、图像重建、三维图像显示等子系统。设备整体精度达到200 mm。与二维数字X射线成像相比,该成像系统可显示切片成像,区分开重叠的影像。实践应用表明,电力设备的X射线三维成像检测是可行的。
猜你喜欢
机电安全(2022年5期)2022-12-13
数学物理学报(2021年1期)2021-03-29
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
科学(2020年1期)2020-01-06
学生天地·小学低年级版(2019年5期)2019-06-05
中学生数理化·七年级数学人教版(2019年12期)2019-05-21
学生天地(2019年15期)2019-05-05
中成药(2017年3期)2017-05-17
中国塑料(2016年9期)2016-06-13