有向间歇通讯下多智能体系统的一致性∗
2021-05-31 04:16于志永于淑珍蒋海军
新疆大学学报(自然科学版)(中英文) 2021年3期
于志永,于淑珍,蒋海军
(新疆大学 数学与系统科学学院,新疆 乌鲁木齐830046)
0 引言
在过去的十几年里, 多智能体系统的协同控制得到了快速的发展. 多智能体系统的协同控制包括一致性控制、会合控制、编队控制等, 一致性是该领域研究的重要问题. 由于它在交通控制、传感网络、移动机器人和无人机飞行[1−4]等领域的广泛应用而备受关注.
一致性指一组多智能体通过信息交流达到某些状态相同的行为, 例如位置、速度、姿态等. 在一致性研究中,主要的任务是设计仅依赖智能体邻居信息的控制协议.文献[5]是多智能体系统一致性研究的奠基性工作.它给出了一阶多智能体系统一致性的基本框架. 已有的一致性研究可简单地分为无领导者一致性和领导者跟随一致性. 通过设计间歇饱和控制协议, 文献[6]研究了具有领导者和跟随者的半全局一致性. 文献[7]研究了间歇控制和自适应控制下多智能体系统的领导者跟随一致性. 这些研究主要考虑有向网络上的领导者跟随一致性. 然而, 许多无领导者的一致性研究主要考虑一些特殊的网路结构, 例如无向网络[8]、有向强连通网络[9]、有向平衡网络[10]等. 对于一般的有向网络, 文献[11]研究了周期间歇通讯下线性多智能体系统的一致性. 然而, 很少有研究考虑具有非周期间歇通讯和非线性动力学的二阶多智能体系统的一致性.
本文旨在提出一种新的方法研究一般有向网络上的二阶多智能体系统的一致性. 与已有的研究相比, 本文的贡献主要包括以下两点: (1) 基于节点排序方法, 本文提出了一种有向生成树转换方法. 这一方法可以将一致性问题转化为误差系统零解的稳定性问题; (2) 对于具有非线性动力学和一般有向网络拓扑的二阶多智能体系统, 本文提出了一种非周期间歇通讯的控制协议并给出二阶多智能体系统达到一致的一些准则.
1 预备知识和模型描述
为了方便, 我们先给出一些记号.Rn代表n维欧氏空间. N+代表正整数集.IN是N维单位矩阵.1和0分别代表分量全为1 和0 的向量.ON代表N维零矩阵. 对于矩阵C,Cij代表第i行第j列的值. 对于矩阵B,BT,λmin(B)和λmax(B)分别代表B的转置,最小特征值和最大特征值.B>0 代表B是一个对称正定矩阵.‖·‖ 代表欧氏范数. ⊗代表矩阵的Kronecker 乘积. diag(·) 代表对角矩阵.
考虑具有非线性动力学的二阶多智能体系统, 其中第i个智能体的动力学描述为

其中:pi(t)∈Rn,qi(t)∈Rn,ui(t)∈Rn分别表示位置状态、速度状态和控制输入.f:R+×Rn×Rn→Rn是一个连续可微的向量值函数, 其表示系统的非线性动力学.
定义1[12]令其中矩阵的第i行只有一对非零的值αi和−αi, 其余值全部为零. 记
定义2[13]对于二阶多智能体系统(1) 的任意初值, 如果

其中:i,j=1,2,···,N, 则称二阶多智能体系统(1) 达到一致.
假设1对于任意的p,y,q,µ∈Rn及t≥0, 存在两个非负常数ρ1和ρ2使得

假设2网络通讯图包含一个有向生成树, 并且记的有向生成树为
注1本文采用文献[12]中提出的节点排序策略. 在有向生成树中, 所有节点被分成三类: 根节点、茎节点和叶子节点. 在有向生成树中, 我们记vik为节点vk+1的父节点, 其中1 ≤k≤N−1, 则(vik,vk+1) 是的一条有向边. 特别地, 当k=1 时,vik=v1, 并记viik−1为节点vik的父节点. 则我们给出如下引理.
引理1[12]假设网络通讯图G= (V,E,A) 包含一个有向生成树其中表示加权邻接矩阵. 当时, 矩阵的元素满足否则令(1) 是一个(N−1)×N维的矩阵, 其元素满足

则二阶多智能体系统(1) 达到一致当且仅当

引理2[12]假设2 成立且L∈RN×N是有向图G的Laplacian 矩阵. 定义矩阵K∈R(N−1)×(N−1)满足HL=KH. 则矩阵K=HLS与Laplacian 矩阵L除零特征值外其余特征值均相同. 此外, 矩阵S的元素满足

引理3若假设1 成立, 则对于任意的矩阵Λ>0, 存在一个对称正定矩阵P>0 使得

证明由于有向图G包含一个有向生成树, 则Laplacian 矩阵L的特征值除一个零特征值外其余的特征值都具有正实部[14]. 根据引理2,矩阵K的所有特征值具有正实部,所以矩阵−K是Hurwitz 稳定的. 因此,存在一个对称正定矩阵P满足Lyapunov 方程(3).
2 主要结论
多智能体系统(1) 在间歇通讯协议下可以表示成如下形式

其中:α和β是耦合强度,δm记作第m个通讯区间内的通讯时间,m∈N+且t1=0.


多智能体系统(4) 的误差动力系统可以写成


定理1若假设1、假设2 成立且满足下列条件

证明我们考虑如下Lyapunov 函数

V(t)=0 当且仅当
对于t∈[tm,tm+δm) 及m∈N+, 将V(t) 沿着(8) 式求导数. 根据引理2 和引理3 可得


根据假设1 可得

结合(13) 式, 等式(12) 可以写成

其中:


对于t∈[tm+δm,tm+1) 及m∈N+,V(t) 沿着(8) 式的导数为

其中:

结合上述的分析过程, 我们得到

其中:ζ1=η1δ1−η2(t2−t1−δ1). 运用条件(10), 易得ζ1>0. 利用数学归纳法可知, 对于任意的正整数m,

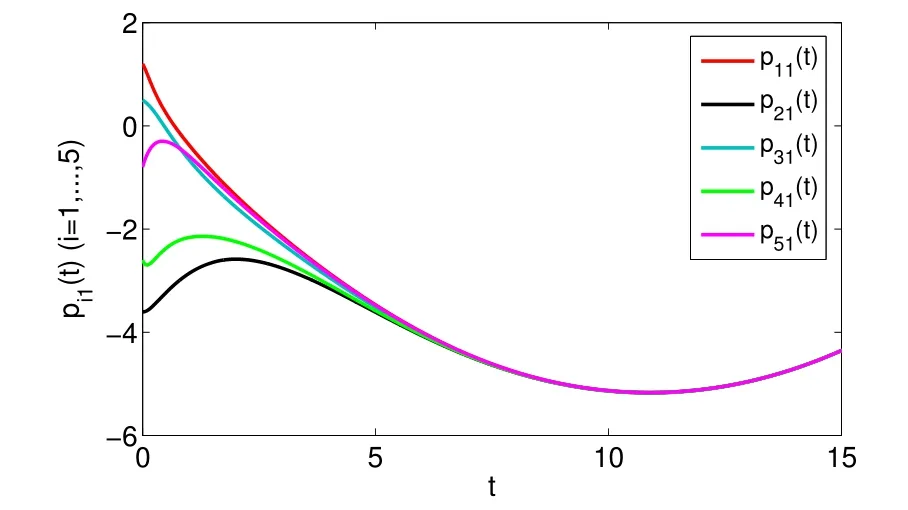
其中:ζj=η1δj−η2(tj+1−tj−δj)>0,j=1,2,···,m. 对于任意的t>0, 存在s∈N 使得ts+1≤t 其中:K0=eωmaxη2V(t0). 即所有智能体指数渐近达到一致. 为了说明控制协议的有效性, 我们给出如下的数值算例. 考虑具有五个智能体的多智能体系统(4).智能体之间的通讯拓扑用图1 所描述, 其中每条边的权重为1. 通过节点排序,通讯拓扑如图2 所示,其中实线代表有向生成树¯G. 非线性函数为f(t,pi(t),qi(t))=0.05sin(pi(t))+0.05cos(qi(t)), 其中pi(t),qi(t)∈R3,i=1,···,5. 容易验证假设1 成立. 根据引理2 可得 选取 α= 2,β= 3, 则易得ξ1= 0.378 3,ξ2= 3.825 2,λmin(Λ)=0.999 6>max{0.094 6,0.425 0}. 通过简单计算可知η1=0.563 7,η2=9.540 0,因此, 我们选取则定理1 的条件都成立. 选取系统的初值为p1(0) = (1.2,−2,−3)T,q1(0)=(−1.5,1.3,−0.5)T, p2(0)=(−3.6,−0.25,−1.5)T,q2(0) = (−0.3,0.5,−0.4)T, p3(0) = (0.5,2,−0.25)T,q3(0) = (−0.6,0.45,−0.8)T, p4(0) = (−2.6,−0.8,1.2)T,q4(0)=(−2.5,0.7,0.5)T, p5(0)=(−0.8,1.3,−0.9)T,q5(0)=(3.2,1,0.4)T.则所有智能体的状态轨线如图3~图8 所示. 图1 通讯图G 图2 排序后的通讯图G 图3 pi1 的状态轨线 图4 pi2 的状态轨线 图5 pi3 的状态轨线 图6 qi1 的状态轨线 图7 qi2 的状态轨线 图8 qi3 的状态轨线 在本文中, 我们采用有向生成树转换方法来研究具有非线性动力学的二阶多智能体系统的一致性问题. 本文提出了一种有向间歇通讯协议, 并利用Lyapunov 稳定性理论和矩阵不等式技巧得到多智能体系统达到一致的相关条件.
3 数值仿真








4 结论
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
体育科技文献通报(2022年3期)2022-05-23
煤气与热力(2022年4期)2022-05-23
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
新生代(2019年16期)2019-10-18
数学学习与研究(2017年20期)2018-01-02
课程教育研究·新教师教学(2016年18期)2017-04-12
中学数学杂志(初中版)(2016年3期)2016-06-24
科技经济市场(2014年11期)2014-12-30
CHINA TODAY(2014年11期)2014-12-20