基于动态聚类的卫星导航信号多波束抗干扰方法
2021-05-24 04:50郑雅萍赵璐璐龚文斌邵丰伟常家超
全球定位系统 2021年2期
郑雅萍,赵璐璐,龚文斌,邵丰伟,常家超
(1.中国科学院微小卫星创新研究院,上海 200120;2.中国科学院大学,北京 100049)
0 引言
卫星导航系统是人类导航史上的重要突破.它能连续提供高精度和高速度的导航、定位和授时信息.然而由于导航信号到达地面时非常微弱,极易受到外界射频信号的干扰,因此研究导航信号的抗干扰方法具有重要意义.自适应波束形成[1]是一种利用阵列天线方向图特性实施的空域抗干扰技术,既能在干扰方向形成零陷,又能对卫星信号进行增强,使整体输出具有最大的信干噪比(SINR),可提高导航接收机的抗干扰性能[2-4].
导航通常需要同时接收多颗卫星信号,多波束抗干扰技术能针对不同卫星信号形成多个波束.在波束指向上,传统方案一般采用固定波束指向.文献[5]提出一种固定一个波束指向法线方向,其余波束均匀分布的指向方法;文献[6]将信号空间分为多个子空间,通过最优分配策略选取多个子空间分别实现固定波束指向;文献[7]对多波束固定指向的方位角和俯仰角的数目进行了分析;文献[8]在改进STAP[9]算法的基础上,对多波束的指向角的角度做了分析.由于通常情况下导航接收机可以同时接收的导航卫星信号较多,为了减轻导航接收机的处理压力和降低硬件资源开销,通常难以做到波束数大于等于接收信号数.因此在多数情况下,接收信号数要多于波束数,此时传统固定指向角的方法一般无法兼顾所有卫星信号[5-8].
针对传统方法的缺陷,本文提出一种基于最小方差无失真响应(MVDR)[10]的动态指向多波束抗干扰方法.该方案通过获取卫星信号来向的先验信息,利用K-means 聚类算法,提取信号来向的聚类中心,以该中心为波束形成的约束方向,保证每颗卫星拥有较高输出的SINR,提高整体的抗干扰性能.
1 多波束抗干扰技术
1.1 自适应波束形成
自适应波束形成技术是一种有效的干扰抑制技术,它克服了时域、频域信号处理的局限性,在空域对干扰进行处理.其原理图如图1 所示.
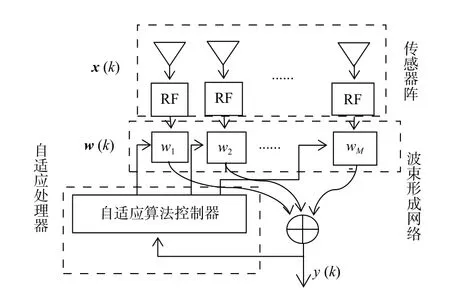
图1 自适应波束形成技术原理图[11]
假设阵元数为M,则k时刻一组接收信号为

若自适应处理器输出的加权矢量为

则对应的输出信号可以表示为

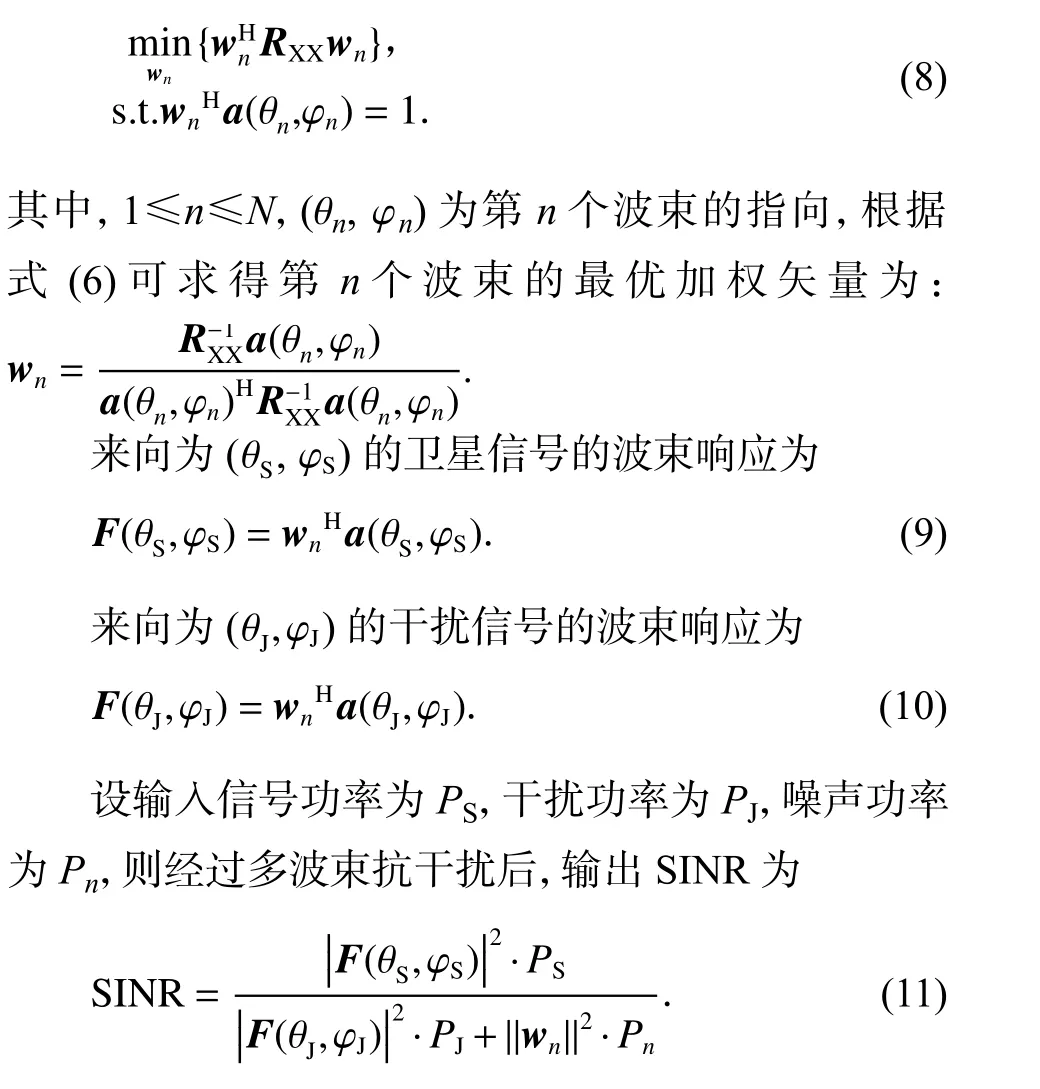
在波束形成算法中,MVDR 通过约束权矢量,可以使输出信号拥有最大SINR,且无需期望信号序列的先验信息.MVDR 目标函数可表示为:

式中:RXX=E{x(k)xH(k)}为阵列接收信号的自相关矩阵;a(θ,φ)为波束导向矢量,θ 和φ分别表示目标波束指向的俯仰角和方位角.M个阵元组成的平面阵的导向矢量a(θ,φ)可以表示为[12]

式中:k=−ω/c[sinφcosθ,sinφsinθ,cosφ]T是对应于方向(θ,φ)的波数向量;ω 为信号圆频率;c为光速;pm=[pxm,pym,pzm]T是第m个阵元的位置坐标向量.
根据式(4)建立拉格朗日函数,可求得最优权值如下:

图2 为七元均匀线阵MVDR 的波束方向图,由图2 所示波束,方向在干扰方向(20°和60°)处均形成了较深的零陷,起到抑制干扰的作用,同时波束主瓣对准信号方向(40°),对有用信号产生增益,从而实现空域滤波的目的.
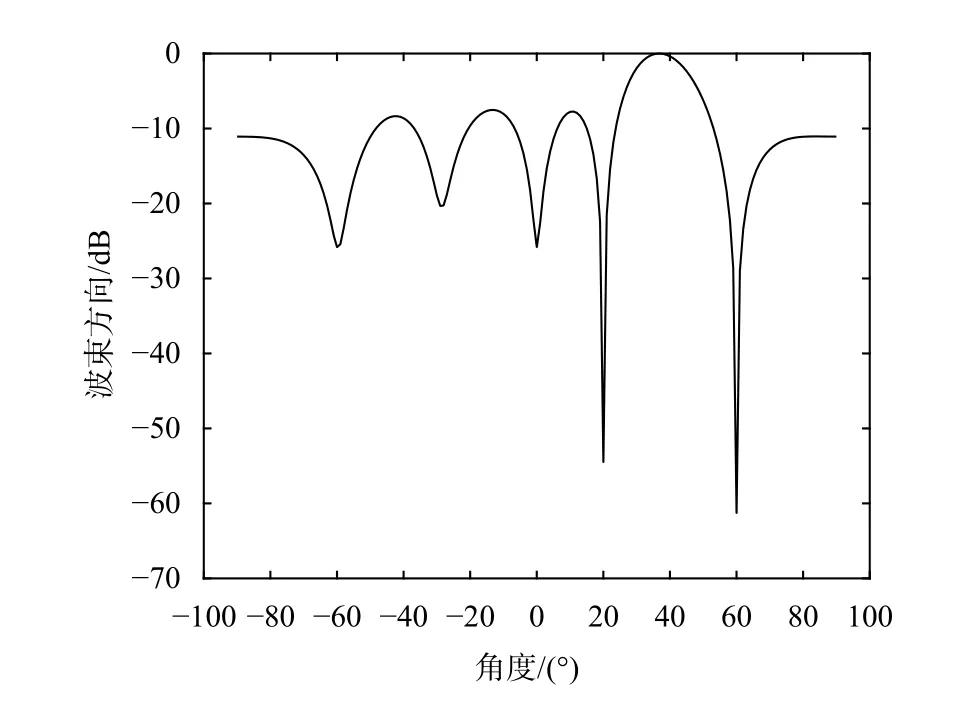
图2 MVDR 波束方向图
1.2 多波束技术
由1.1 节可知,自适应波束形成技术能较好地实现信号的抗干扰.但在实际导航中,往往需要同时接收多颗卫星信号,多波束技术可以针对不同卫星自适应地形成多个波束.
多波束抗干扰的原理框图如图3 所示,当波束数目为N,卫星数目为NS,干扰数目为NJ时,第ns个信号的来向为(θns,φns),第nJ个干扰的来向为(θnJ,φnJ),则k时刻接收信号可表示为
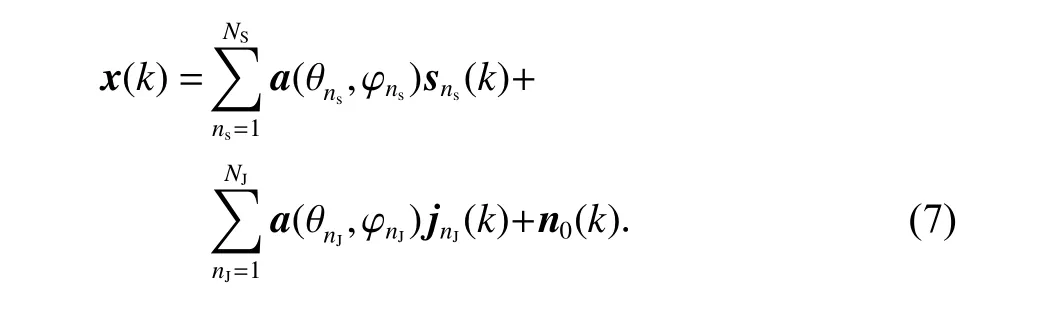
式中,sns(k)、jns(k)、n0(k)分别表示k时刻第ns个卫星信号,第nJ个干扰以及阵列天线的噪声矢量.

图3 多波束抗干扰原理框图
第n个波束的目标函数可以表示为:
化简后,可得

式中:SNR 等于PS/Pn,表示输入SNR;JNR 等于PJ/Pn,表示输入JNR.
2 波束指向方向
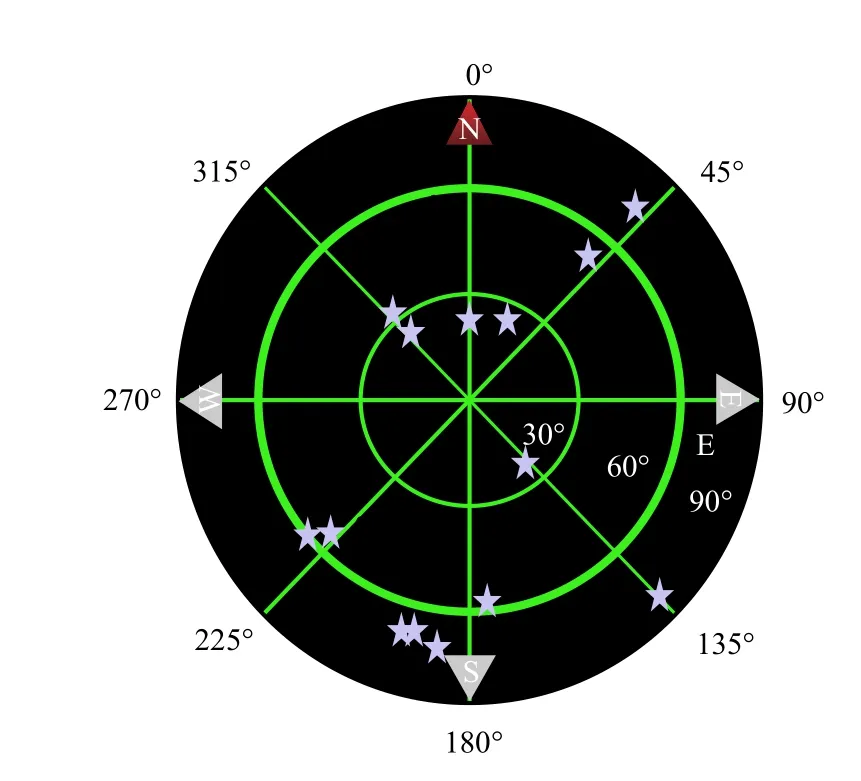
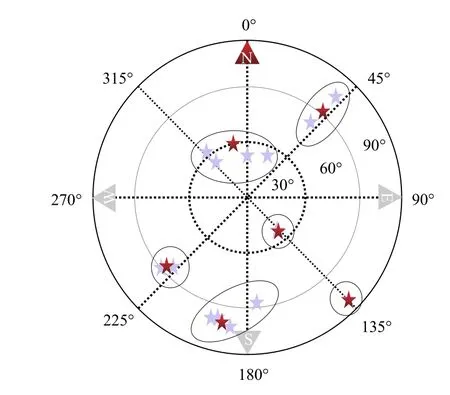
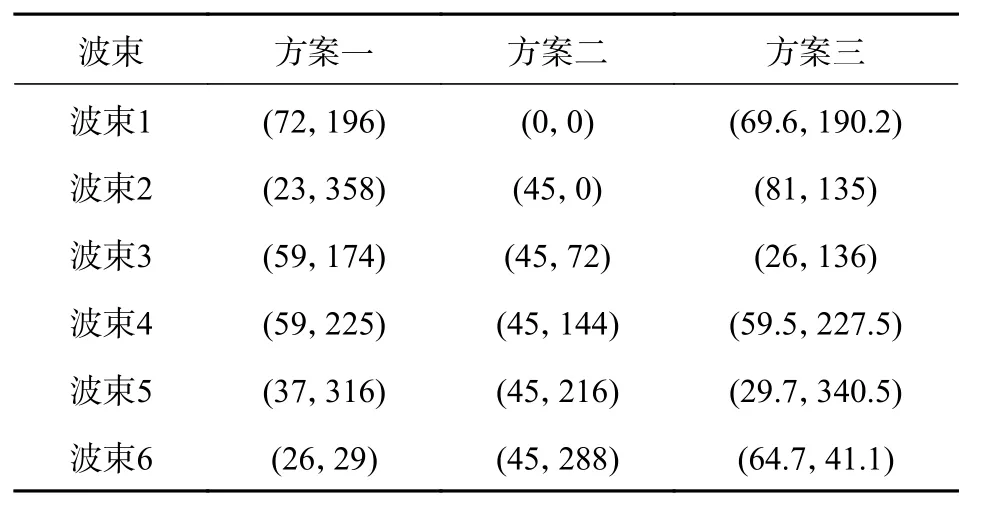
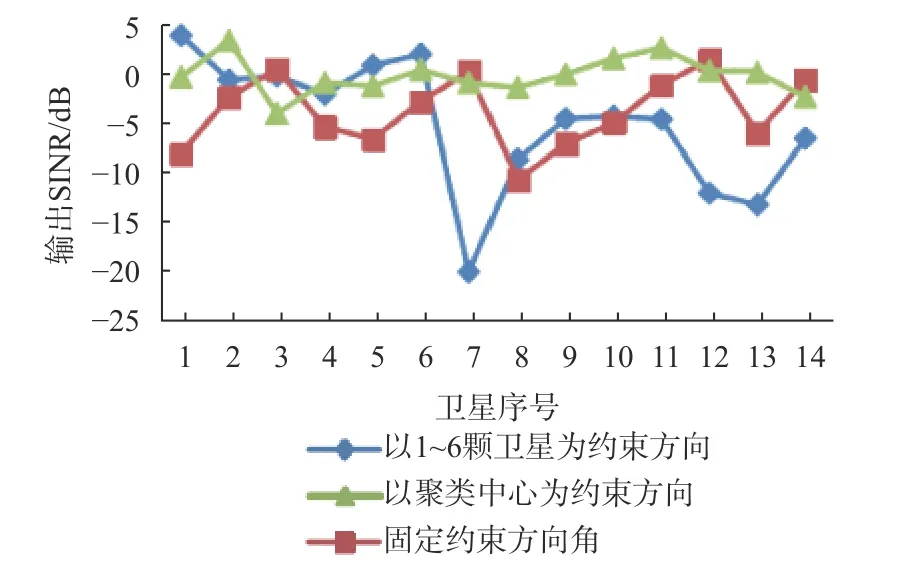
在多波束抗干扰技术中,波束指向(θn,φn)的选择决定了波束主瓣的方向.当条件受限,无法形成与卫星数相等的波束,即N 根据卫星星历数据,可以估计卫星信号大致来向,据此提出一种新的动态波束约束方式.该方法根据卫星信号来向的先验信息,利用K-means 聚类算法,将卫星信号来向分成N类,提取信号来向(θ,φ)的聚类中心,以该中心为波束形成算法的约束方向. 具体步骤如下:1)设定波束数目为N,读取卫星信号来向数据(θ,φ);2)初始化聚类中心,在数据长度范围内随机产生N个不同的值,以此为下标提取对应的卫星信号方向,作为聚类中心;3)分配信号来向数据点,将信号来向数据分配到与各初始聚类中心欧氏距离最近的聚类,产生列表,并计算平均误差;4)以每一类所有点的平均值作为新的聚类中心,更新聚类中心,再次将数据分配到与各个新的聚类中心欧氏距离最短的聚类,产生新的列表,计算误差;5)比较前后两次误差,若不相等则继续重复步骤4),否则终止循环.流程图如图4 所示. 通过该算法产生N个聚类中心,以此作为N个波束的约束方向(θn,φn),代入多波束的数学模型,即式(8),最终实现多波束抗干扰. 图4 聚类算法流程图 建立一个八元均匀圆阵,半径R等于半波长.图5 为均匀圆阵的布阵模型,以参考地为原点,正北为x轴,正东为y轴,垂直xoy平面的法线为z轴,建立坐标系. 假设波束数目为6,干扰来向(40°,90°),输入JNR 为40dB;卫星信号参考:时间2020-12-30T20:08:00,地点31°12′N,121°36′E 处可见的14 颗北斗卫星信号,输入SNR 为−20dB.卫星实时分布图如图6 所示,信号来向(θ,φ)如表1 所示. 基于该天线传感器阵模型,对以下三种约束方案进行仿真分析: 方案一,随机选取6 颗卫星信号来向作为波束指向,本文以1~6 颗卫星为例;方案二,据文献[4]所述,固定一个波束于法线方向,其余五个波束的俯仰角θ 固定为45°,方位角φ在空间范围内均匀分布;方案三,对卫星信号来向数据采用K-means 聚类算法分析,获取6 个信号来向的聚类中心作为波束指向.聚类分析结果如图7 所示,其中红星代表各个聚类中心.以上三种方案的波束指向角如表2 所示. 图6 卫星实时分布图 表1 卫星信号来向(°) 图7 卫星分类及聚类中心示意图 表2 波束约束角度(°) 图8 为方案三的其中一个波束的方向图,约束方向为第一个聚类中心(69.6°,190.2°).由图可知,方向图在干扰方向(40°,90°)处产生了较深的零陷,在约束方向处拥有最高增益,从而使附近的卫星信号也拥有高增益. 图8 圆阵方向图 图9 为三种方案的输出SINR 对比图.由图可知,方案一除了1~6 颗卫星,其余卫星的输出SINR较差,且参差不齐.方案二即固定约束方向角,相较方案一总体性能有所提升,但仍有部分卫星信号的输出SINR 较低.可见当卫星信号数目大于波束数目时,传统的约束方向并不能实现对全部卫星信号的高质量接收.而本文采用K-means 聚类算法将聚类中心作为约束方向,能够有效地兼顾每一颗卫星的信号,使14 颗卫星信号均拥有高增益,从而使整体的输出SINR 保持在一个较高的水平. 图9 信号输出SINR 对比图 针对导航信号抗干扰的问题,提出了一种基于K-means 聚类算法的动态指向多波束抗干扰方案.该方案将卫星信号来向数据(θ,φ)通过K-means 聚类算法进行聚类分析,获取聚类中心作为多波束的指向.以实际接收到的14 颗北斗卫星信号的方位信息为参考,建立天线阵模型进行仿真,结果表明当卫星信号数目大于波束数目时,本文提出的方案较传统固定波束的方法有更优的性能,能有效地保障每颗卫星的输出SINR,提高了整体的抗干扰性能.
3 仿真实验及结果分析


4 结束语
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中学生数理化(高中版.高考数学)(2021年10期)2021-12-02
舰船电子对抗(2021年2期)2021-06-16
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
福建基础教育研究(2019年6期)2019-05-28
环球时报(2018-01-04)2018-01-04
中国青年(2015年20期)2015-10-21