北斗三号精密单点定位精度分析研究
2021-05-24 04:50:52
全球定位系统 2021年2期
(中山大学 电子与通信工程学院,广州 510006)
0 引言
北斗三号(BDS-3)工程于2009 年正式启动,与北斗二号(BDS-2)提供区域性服务不同,BDS-3 包含了3 颗地球静止轨道(GEO)卫星、24 颗中圆地球轨道(MEO)卫星以及3 颗倾斜地球同步轨道(IGSO)卫星,可以提供全球服务[1].李星星等[2]在2018 年,基于MGEX(Multi-GNSS Experiment)站点与iGMAS 站点,对BDS-3 进行了定轨试验.张小红等[3]对BDS-3 产生的新信号(B1C、B2a、B2b)进行了信噪比、多路径、三频消电离层、无几何组合、组合残差的统计等相关研究.叶飞等[4]利用B1C 和B2a 频点信号确定了BDS-3 的轨道.Yan 等[5]给出了BDS-3 的精密钟差和轨道.
方欣颀等[6]进行了BDS-2/BDS-3 的伪距单点定位精度分析,发现BDS-3 相对于BDS-2 精度有明显提升,且BDS-2/BDS-3 组合明显削弱了BDS-2 定位精度与地理经度的边缘效应.谢明德[7]对BDS-3 的三频精密单点定位(PPP)精度进行了分析.陈永贵等[8]对北极地区BDS-3 进行了伪距单点定位精度分析.田先才等[9]对BDS-3 观测数据质量以及定位服务性能进行了分析.周培平等[10]对BDS-3 监控站智能化运维方法进行了研究.
文章基于B1I、B2I、B3I、B1C、B2a 共5 个频点的信号进行实验,分别组合为B1I-B2a、B1I-B2I、B1I-B3I、B1C-B2a、B1C-B3I、B2a-B3I、B2I-B3I,形成7 种消电离层组合,进行定位结果统计研究,并得到相关结论.
1 算法介绍
PPP 利用伪距和载波相位观测值,解算出接收机坐标、接收机钟差、电离层延迟、载波相位模糊度和天顶对流层延迟这五类参数,其观测方程如下:
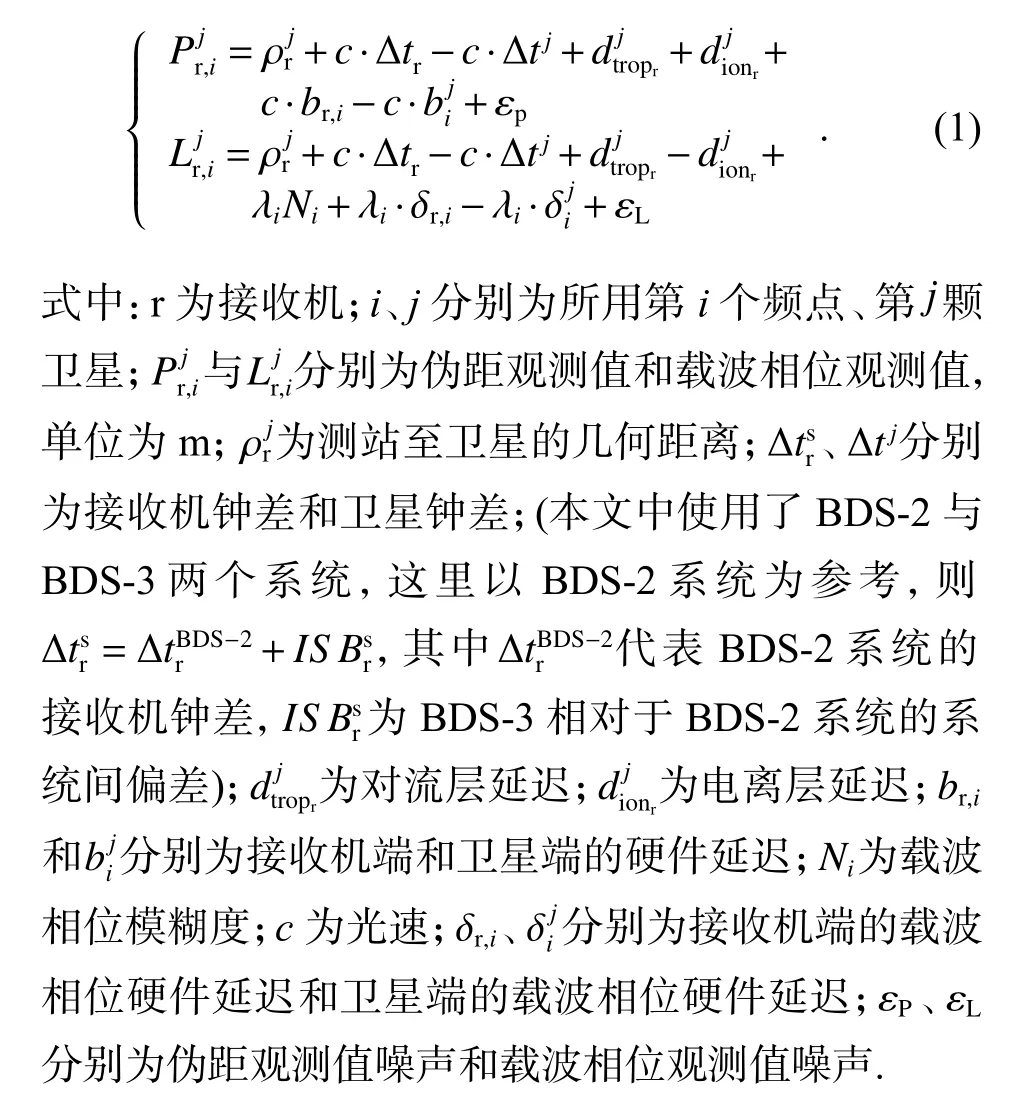
需要说明的是,通过对应的干延迟模型进行改正,残余的天顶对流层湿延迟分量作为未知参数进行估计.由于∆tj通过欧洲定轨中心(CODE)提供的精密钟差产品进行改正,而CODE 提供的精密钟差产品是根据双频消电离层(对于BDS,为B1I 与B2I)观测值得到的,包括了消电离层组合的差分码偏差项,如式(2)所示
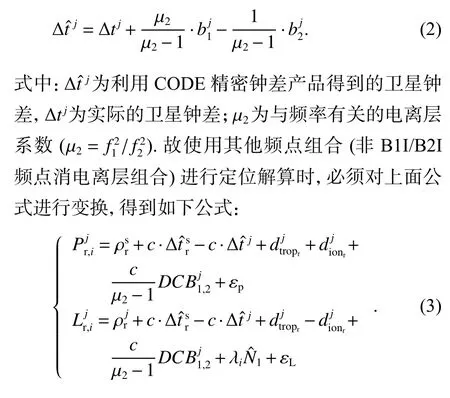
在本研究中,使用了中国科学院测量与地球物理研究所提供的DCB 校正,包括GPS、GLONASS、Galileo、BDS 和QZSS 的多个系统,其精度为0.2~0.6ns.
文章基于B1I、B2I、B3I、B1C、B2a5 个频点进行实验,分别组合为B1I-B2a、B1I-B2I、B1I-B3I、B1C-B2a、B1C-B3I、B2a-B3I、B2I-B3I 形成7 种消电离层组合,选取了四个站点进行定位结果统计研究,并得到相关结论.
其中BDS-2 卫星发射信号有:B1I、B2I、B3I;BDS-3 卫星发射信号有:B1I、B1C、B2a、B3I,其各个频点信号的详细信息如表1 所示.
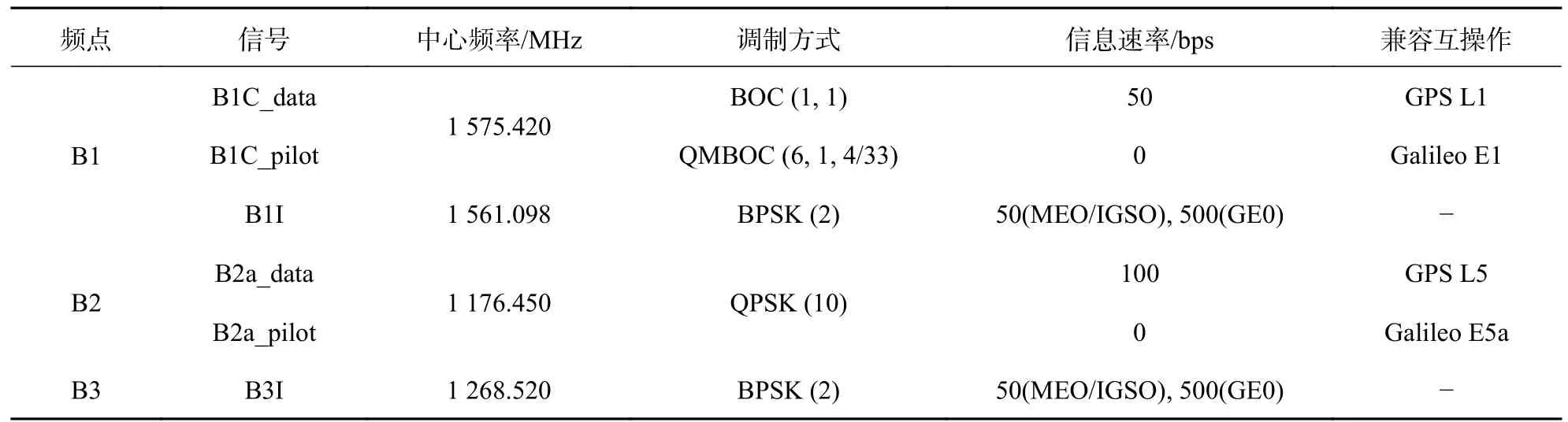
表1 BDS-3 公开服务信号体制
2 数据选取与策略
2.1 数据选取
MGEX 部分跟踪站具备BDS-3 新信号的跟踪能力,文章选取4 个MGEX 站点(如图1 所示)进行坐标解算.4 个站点分别为POTS、URUM、SGOC、GUAM.

图1 实验选取4 个站点分布图
数据选取的时间为2020 年7 月1 日.采样率均为30s,均可接收到BDS-3 以及BDS-2 系统的公开服务数据(B1I、B2I、B3I、B1C、B2a).
2.2 策略设计与滤波具体算法
PPP 详细策略如表2 所示.使用消电离层组合,对流层干延迟使用UNB3m 模型,湿对流层使用参数估计的方式.卫星PCV 与PCO 改正使用IGS_Atx_14,截至高度角设为5°,固体潮、海洋潮、极潮使用IERS2010 模型,接收机钟差使用白噪声的估计方法,坐标参考使用SNX 周解.
详细的处理流程图如图2 所示,首先从分析中心、数据中心获取精密轨道钟差产品,然后与接收机收到的广播星历与观测数据一起进入数据预处理阶段,对单个历元进行相关数据的匹配.
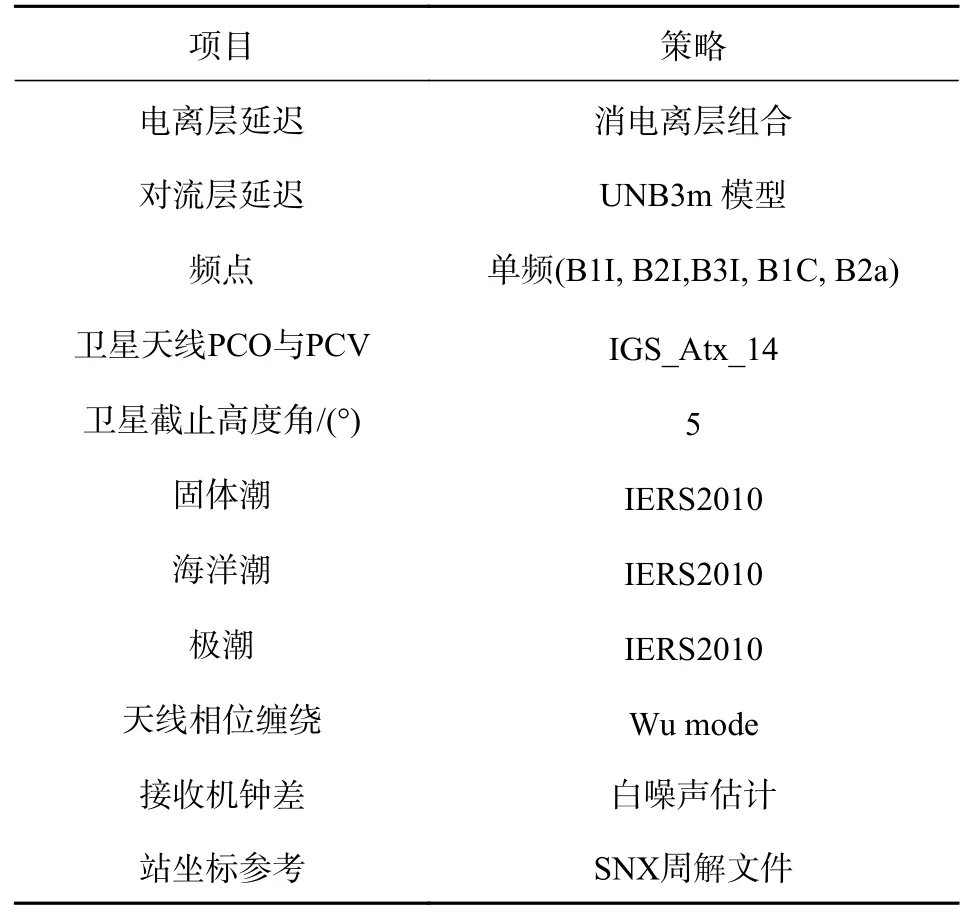
表2 具体的PPP 策略
将单个历元的数据先进行PPP 处理,剔除误差大的卫星,以及进行周跳探测等质量控制,进行滤波估计,对于残差较大的卫星,再次调整权重值,进行新一轮的滤波估计.进一步估计得到相关参数,包含坐标、钟差、对流层湿延迟、模糊度、频间偏差及码间偏差等参数.文章只关注于使用坐标参数.
3 结果与分析
3.1 卫星可视数情况
图3 为2020 年4 月9 日GUAM、POTS、SGOC、URUM4 个站点可视卫星数量图,GUAM 可视卫星数量在15~20 颗,POTS 位于欧洲,全天可观测数量在10~15 颗,SGOC 可以观察到16~20 颗卫星,URUM 可以观察到12~15 颗卫星.
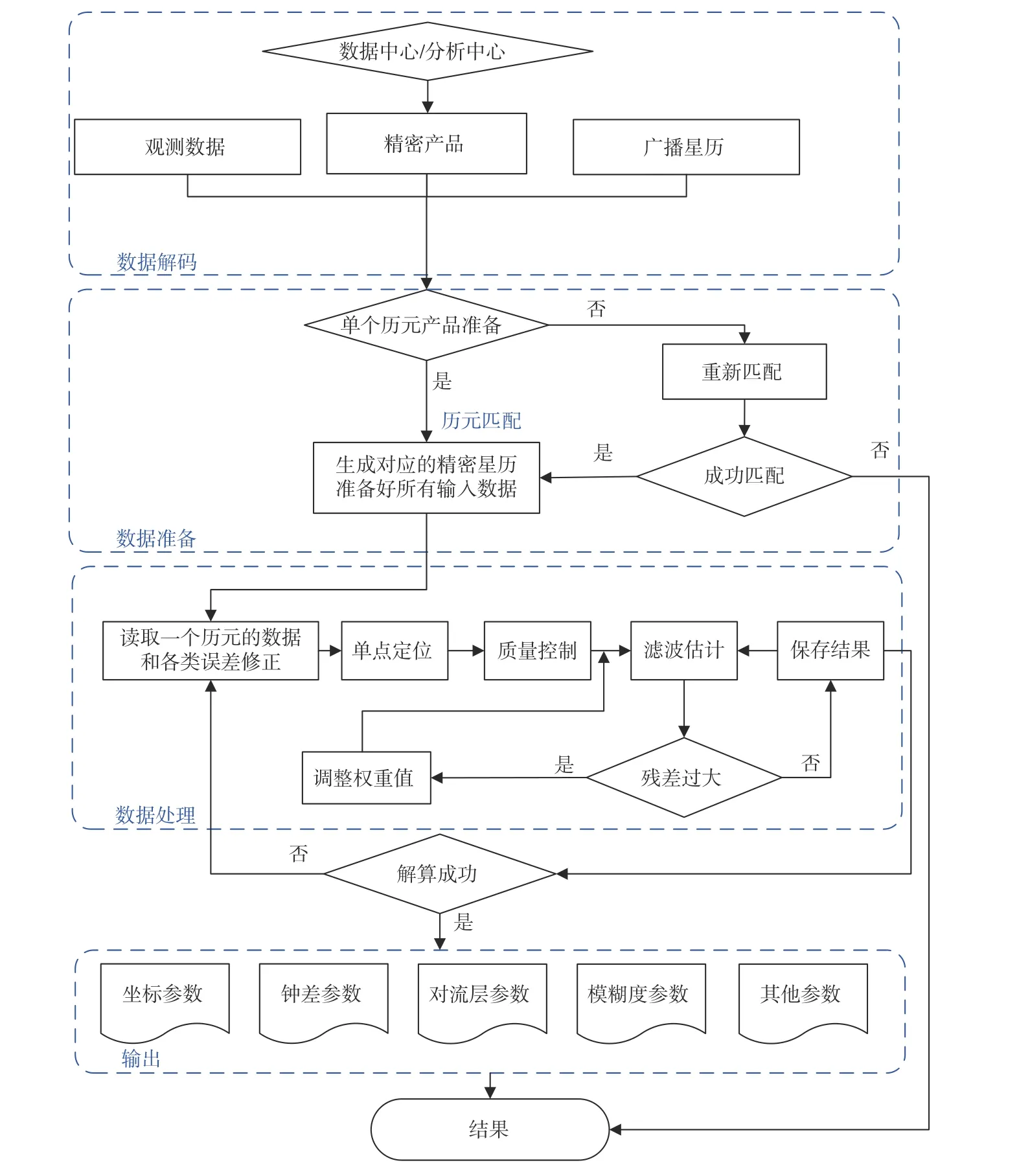
图2 详细处理流程图
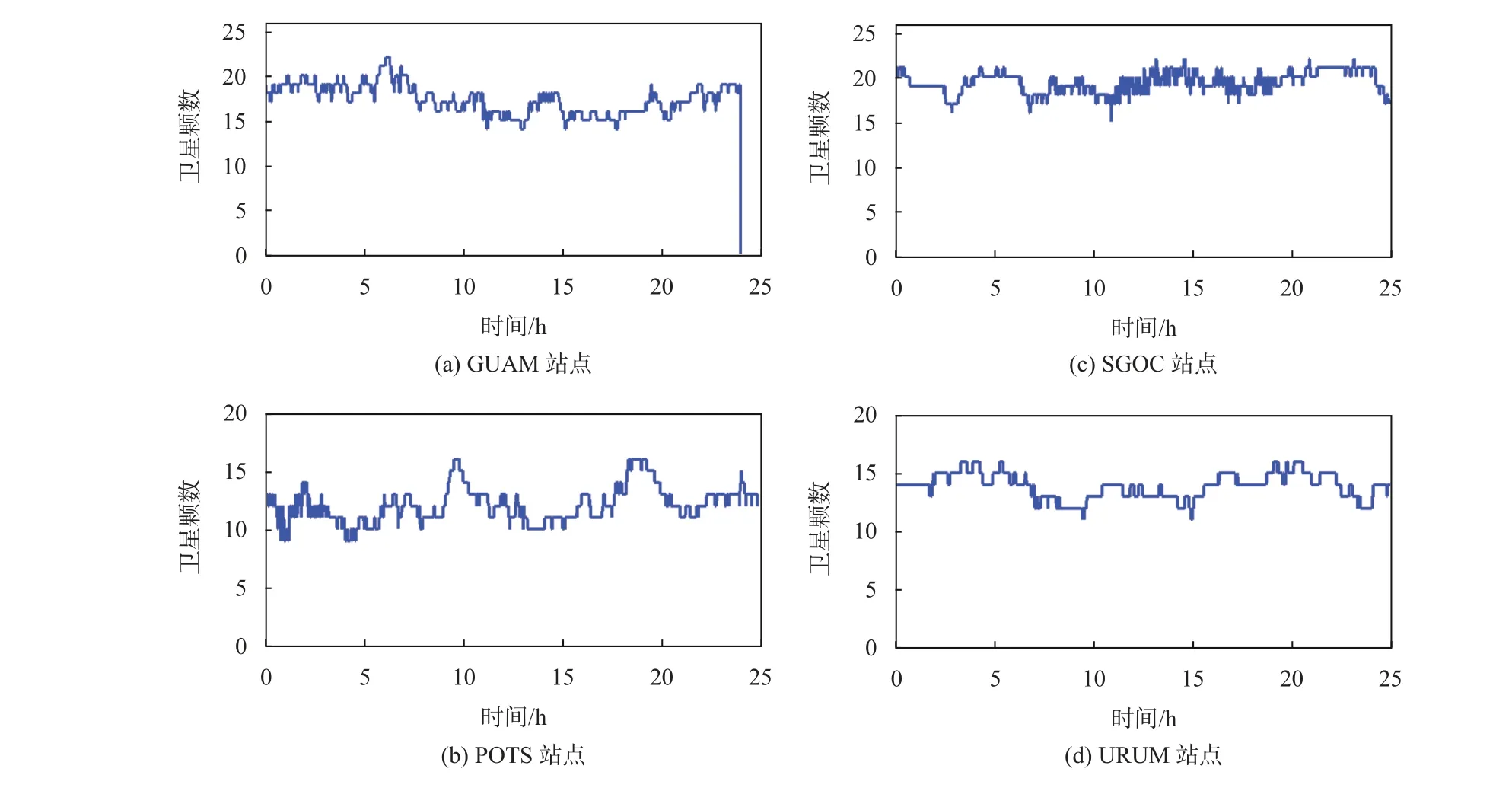
图3 2020 年4 月9 日四个站点卫星可视数量图
由图3 所示,BDS-3 运行后,全球可以观测到的BDS 卫星数量大大增加,有利于定位结果的稳定性、鲁棒性以及冗余性.
3.2 卫星可见图
BDS-3 在全球各个区域的站点,其卫星可视数以及位置精度因子(PDOP)值,相较于BDS-2,有了显著的提升.在中国、日本、澳大利亚等地区,由于BDS 系统特有的GEO 以及IGSO 卫星的存在,其卫星可视数以及PDOP 值将优于GPS 系统.在60°S~60°N 和50°E~170°E 区域内,BDS-3 的卫星可视数为11~14 颗,分别比GPS 与Galileo 多1~3 颗,比GLONASS 系统多3~7 颗.
图4 为2020 年4 月9 日GUAM、POTS、SGOC、URUM4 个站点卫星可见情况图,最高编号可接收到BDS-3C46.除了位于欧洲的POTS,其他站点均可以全天观测到4 颗以上的GEO 卫星.
3.3 定位结果的比较
3.3.1 定位表现
图5 为2020 年4 月9 日URUM 站点在北、东、天(N、E、U)方向的7 个组合定位结果图,可以看到,除了最后两个组合B2a-B3I 和B2I-B3I 由于差分码偏差没有进行正确修正,产生系统性偏差,其他组合均表现平稳.收敛时间均在2h 以内,定位精度收敛后均在5cm 以内.
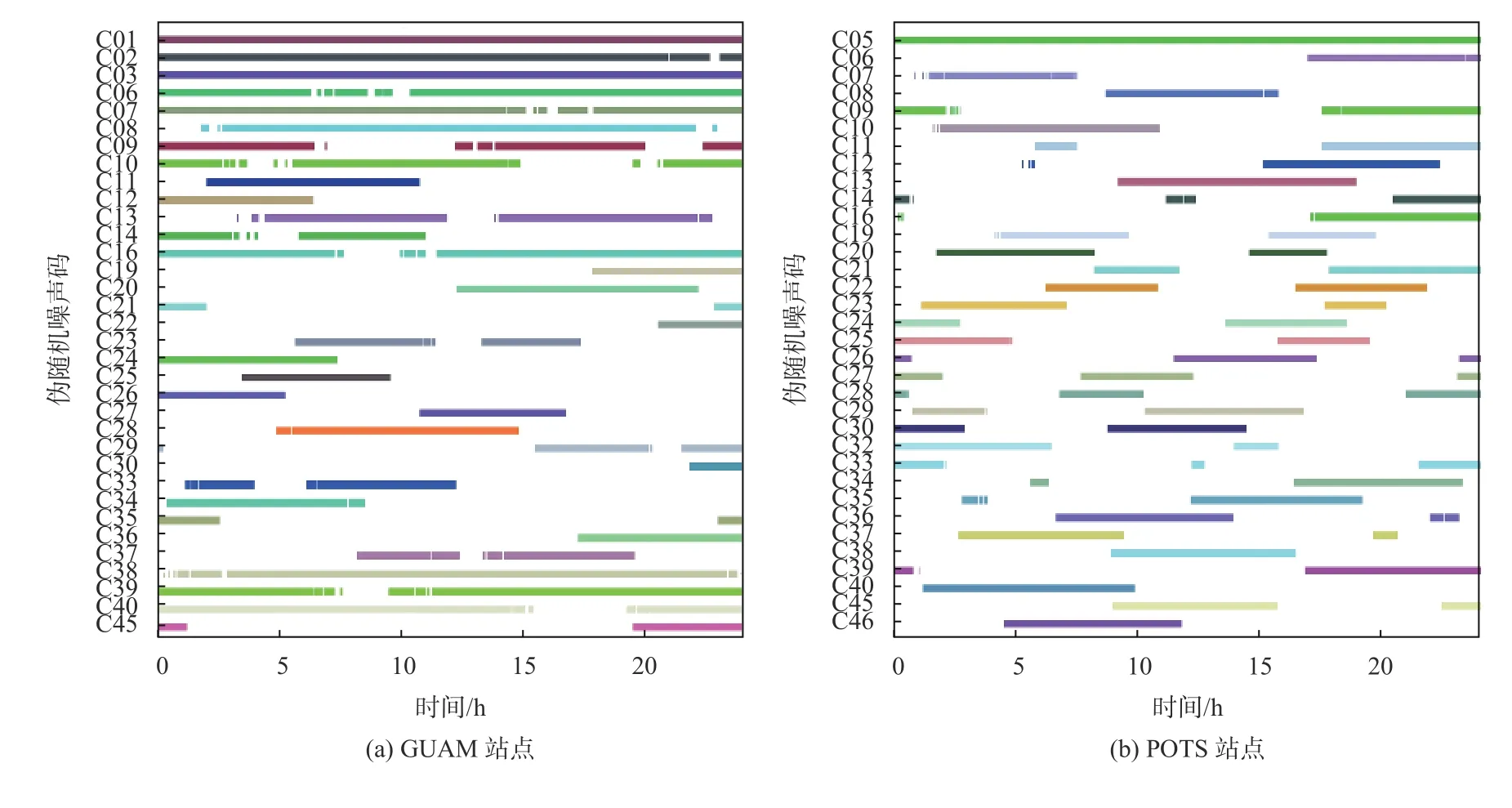

图4 2020 年4 月9 日卫星可见图
3.3.2 定位结果统计
图6 为4 个站点GUAM、POTS、SGOC、URUM的七组合三维方向统计图.统计发现,除了4 个站点的B2a-B3I 与B2I-B3I 组合,所有站点的其他组合,定位结果均保持在厘米级别的精度.定位精度较差的原因是卫星数较少(只能观测到一部分BDS-2,并且数据质量较差).其中组合B1I-B2a、B1I-B2I、B1I-B3I、B1C-B3I 表现较好,原因是可观测的卫星数较多.


图5 2020 年4 月9 日URUM 站点定位结果图

图6 定位结果图
4 结束语
文章基于BDS-3 卫星的四种开放服务信号(B1I、B1C、B2a、B3I)与当前BDS-2 播发的B2I 信号,形成7 种消电离层组合(B1I-B2a、B1I-B2I、B1IB3I、B1C-B2a、B1C-B3I、B2a-B3I、B2I-B3I),基于当前可以观测到的所有BDS 卫星,进行了定位试验.
结果表明:
1)4 个试验站点,不同频点的组合PPP 结果均在厘米级;
2)组合B1I-B2a、B1I-B2I、B1I-B3I、B1C-B3I 表现较好,均可观测到卫星数目较多.
猜你喜欢
广东通信技术(2023年9期)2023-10-29 07:09:32
空间科学学报(2021年4期)2021-08-30 08:31:16
空间科学学报(2021年2期)2021-07-21 08:43:28
导航定位学报(2018年3期)2018-09-03 00:56:16
雷达学报(2017年6期)2017-03-26 07:53:02
载人航天(2016年4期)2016-12-01 06:56:24
水利科技与经济(2016年9期)2016-04-22 01:07:30
电信工程技术与标准化(2015年10期)2015-12-22 09:08:10
导航定位学报(2015年2期)2015-06-05 09:27:34
电信工程技术与标准化(2013年4期)2013-08-09 08:22:28