北斗卫星导航系统在近海无人水下航行器路径跟踪方面的应用
2021-05-24 04:51:04
全球定位系统 2021年2期
(上海海洋大学 工程学院 上海 201306)
0 引言
随着近年我国提出建设海洋强国的战略,可用于海洋水质检测及海平面测绘的无人水下航行器(UUV)得到了快速发展.UUV 是一种可在水下运动,具有视觉和感知系统,通过遥控操作方式,配备机械手代替或辅助人工完成水下作业任务的机电装置[1].先进的UUV 离不开先进的导航控制系统.
北斗卫星导航系统(BDS),是我国基于国家安全和经济社会发展自主研发的全球卫星导航系统,是为全球用户提供全天候、全天时、高精度、高可靠的定位、导航和授时服务的国家重要时空基础设施,继美国的GPS,俄罗斯的GLONASS之后,第三个成熟的卫星导航系统[2].BDS 作为后起之秀,不仅拥有其他导航系统的所具有的功能,而且还拥有其他导航系统不具有的双向短报文通信功能[3].2020 年BDS 完成了全球组网使其在交通运输业、农业、渔业及防灾减灾方面得到了广泛应用.例如姜少杰等[4]提出了一种BDS/GPS 双模组合定位的水下机器人高精度导航定位系统,并通过设置单模定位系统作为双模定位系统的对比方案研究双模系统的性能,通过对实验数据的滤波处理得出双模定位系统比单模定位系统性能优越的结论.崔秀芳等[5]为解决渔船遇险搜救难题,提出了运用BDS 监控远洋渔船的方法,利用BDS 系统监控范围广,稳定性好及独有的双向短报文通信优势,实现了对远洋渔船的实时监管及海上突发事件的及时救援.
无线信号很难抵达深海区域,所以BDS 在UUV 上的应用较少.研究结果表明,当UUV 工作在近海水深小于300m 海域时,无线电导航和卫星导航技术均可正常使用[6].本文将BDS 应用在近海UUV路径跟踪方面,通过UUV 定位终端接收BDS 定位数据,STM32 单片机模块接收并处理UUV 位置数据并通过无线通讯模块将数据发送给上位机,上位机接收、储存并比较UUV 实际路径数据与给定路径数据偏差,并向STM32 模块下达控制指令控制UUV 驱动模块改变UUV 的航向,实现精确的路径跟踪.
1 UUV 系统及结构设计
UUV 是一个复杂的无人潜航系统,通常由驱动系统、控制系统(STM32 作为主控芯片)、导航定位系统、无线通讯系统、信息采集系统及载体等组成[7].本文建立的UUV 主要包括:1 对42BYGH直流无刷电机(通过电机转速差实现转向)、水平方向舵(STM32 控制舵机转角实现浮潜)、双叶螺旋桨、KXD-48-V-80AH 动力锂电池、40A 双向无刷电调组成的驱动系统;岸基监控平台(主要为上位机,PC 机组成)、工控机(STM32 为主控制器)、直流稳压模块组成的控制系统;导航定位系统包括:MPU6000 电子陀螺仪和UM220-ⅣN北斗定位模块.无线通讯系统主要为RS485 串口、5G 通讯及北斗短报文通讯模块.信息采集系统包括:PCI8601 数据采集卡、图像采集模块、温盐深仪(CTD)及定点测绘模块等.载体选择一体化铝合金耐压机身(便于密封防水).图1 为UUV 硬件系统结构.
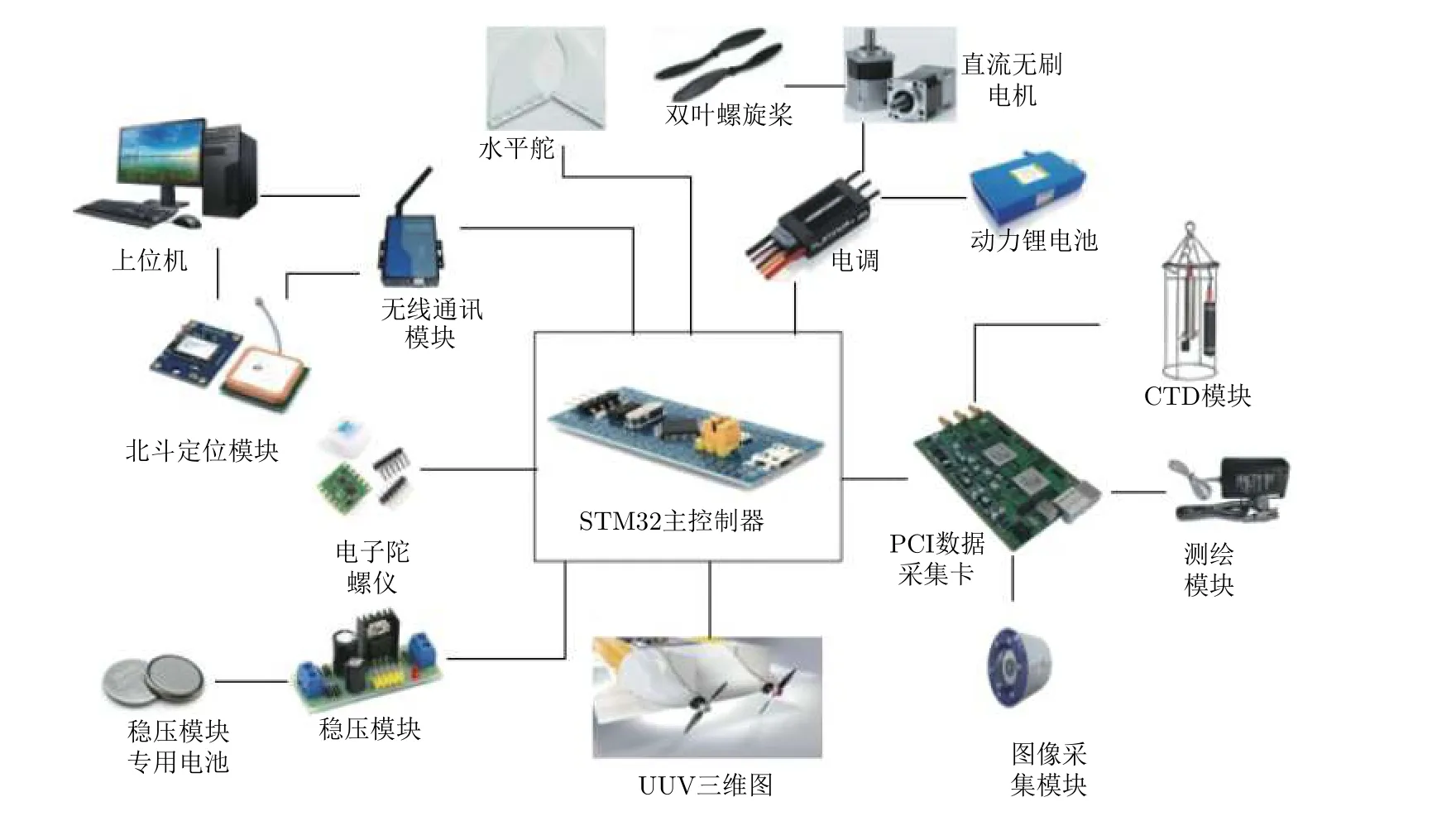
图1 UUV 硬件系统结构
2 BDS 在UUV 上的应用
2.1 BDS 定位系统原理
UUV 在不同深度水域航行时,采用不同的导航定位方式,当工作水域深度小于300m 时,可以使用BDS 或其他无线电导航技术.
对近海UUV 进行准确定位,需要测量4 颗已知坐标的BDS 卫星到UUV北斗定位模块之间的距离.卫星到定位模块的距离可由真空中的光速乘以卫星信号传播到定位模块接收机的时间得到.假设UUV 坐标(x0,y0,z0)为未知参数,已知空间卫星端卫星的瞬时坐标为(xi,yi,zi),其中i=1,2,3,4(可由卫星星历,卫星钟校正参数等数据计算出),以已知卫星坐标为圆心,卫星坐标到UUV 坐标的距离为半径,采用三维空间交会的方法计算UUV 三维空间坐标,解方程组就得到定位模块接收机坐标,计算公式如下:
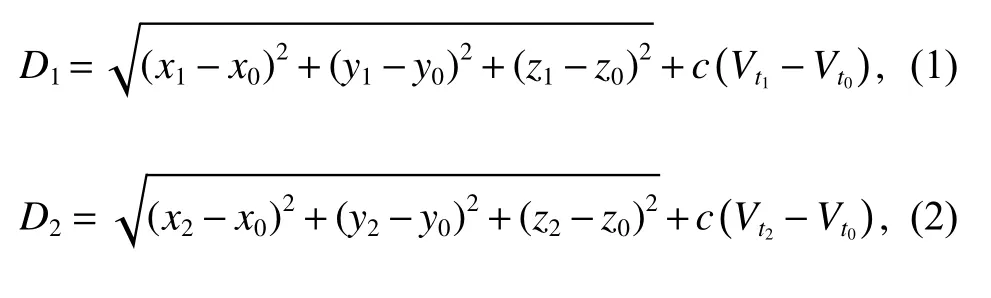

式中:Di为卫星到定位模块观测的距离;c为真空中的光速;∆ti为卫星信号到接收机的时间;Vt0为接收机时钟差;Vti即卫星时钟差,由卫星星历得出.
联立上述方程,便可求出UUV 的空间坐标(x0,y0,z0)及接收装置的时钟差.图2 为BDS 定位系统框图.
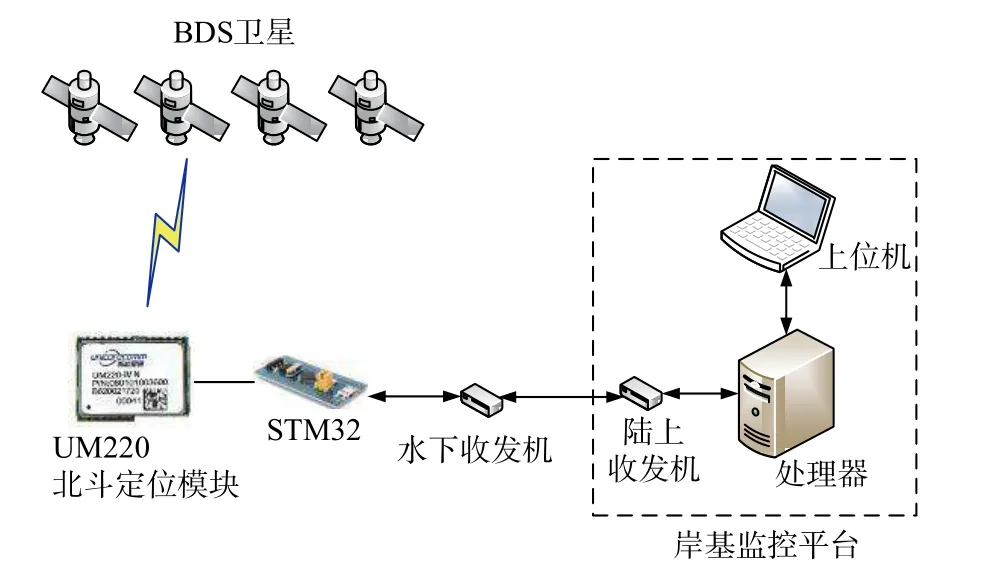
图2 BDS 定位系统框图
2.2 定位系统模型
当UUV 在近海海域航行时,为便于研究定位系统模型,可以将UUV 的运动看作是在二维平面xoy上的运动,因此其从E(x1,y1)点运动到F(x2,y2)点的运动模型为

式中:V0为UUV 的初速度;θ为初始方位角;S为E(x1,y1)至F(x2,y2)点的距离;E(x1,y1)点为UUV 的初始位置,可以由北斗定位模块测出;UUV 从E(x1,y1)点运动到F(x2,y2)点时北斗定位模块可测出此时F(x2,y2)点的相对位置.同时F(x2,y2)点的相对位置也可以由运动模型推断得出.两个数据通过相互修正得到UUV 的具体位置,提高了UUV 的整体定位精度.
3 导航定位分系统的设计
导航定位分系统采用模块化设计,包括单片机模块,北斗定位模块,无线通讯模块和PC 上位机[8].当UUV 运行时,上位机向北斗定位模块下达接受定位数据的命令,此时北斗定位模块开启,接收来自BDS 的导航信号,实现定位后将数据发送给STM32 单片机,STM32 单片机通过算法解析、中值滤波及卡尔曼滤波处理得出UUV精确的位置坐标、航行轨迹、航速航向等数据并通过无线通讯模块将数据发送给上位机,上位机存储UUV 位置数据并在界面上显示.上位机模块将UUV 实际运动轨迹与给定路径进行对比,如果出现路径偏差,上位机经过算法计算将控制命令下达给STM32 单片机,STM32 接受命令并解析后下达指令给UUV 驱动模块,通过改变UUV 双电机转速差及舵机舵角控制UUV 沿给定路径运动至特定区域,待UUV 到达目的地后,打开信息采集模块及定点测绘模块,采集水样并得出水温、盐度、PH 值等数据并记录采样点位置坐标,并将采集到的数据发送到STM32单片机.单片机经过数据处理后,再发送给上位机记录和保存.完成一次海水取样及测绘任务后巡航至下一测绘点.图3 为基于导航定位分系统的UUV 工作流程图.
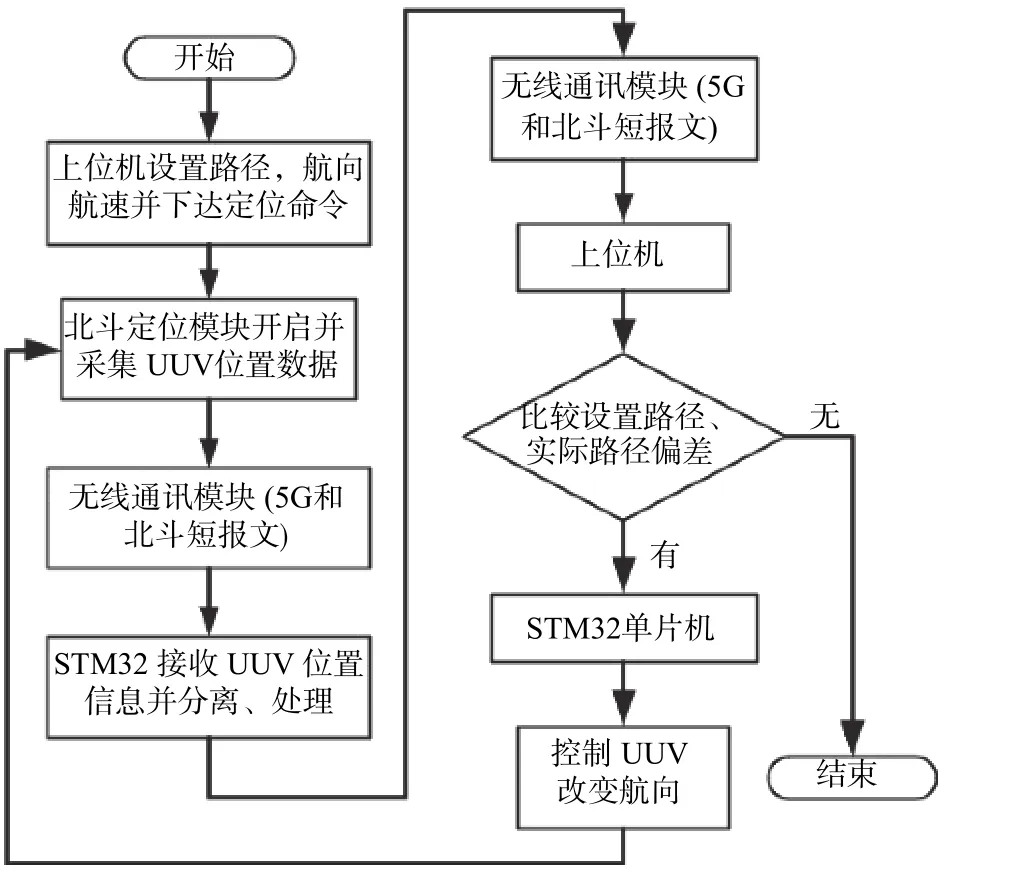
图3 导航定位分系统的UUV 工作流程图
3.1 单片机模块
作为UUV 控制系统的核心.单片机负责接收北斗定位模块传输的$BDGGA 格式数据,并对数据进行算法解析,采用中值滤波消除数据噪声,卡尔曼滤波使输出的定位数据变得更加平滑[9].并将解析后的数据通过无线通讯模块传送给上位机.本文选用高性能STM32 单片机,该芯片采用Cortex-M4 内核,180M主频CPU,具有256K 的SRAM,支持SDRAM,包含140 个GPI 口,引脚为176pin,拥有更快的A/D转换速度和更低的ADC/DAC 工作电压[10].高性能STM32 单片机作为主控制器,一方面接收信息采集模块采集的测绘图像及水质参数等信息,并对数据进行解读、分析、滤波处理后发送到岸上监控系统上位机显示界面显示并存储;另一方面接收UM220-ⅣN 定位模块采集到的UUV 实时位置,航向航速等信息.通过数据处理后经无线通讯模块发送给上位机,上位机将其与跟踪路径比较进而控制UUV 沿跟踪路径航行.
3.2 北斗定位模块
北斗定位模块是UUV 导航定位分系统的核心,它的优劣决定了UUV 能否实现精确的路径跟踪,本文选用北京和芯星通科技有限公司研发的UM220 第四代产品UM220-ⅣN 定位模块,该模块主要针对车辆监控、手持终端以及船舶定位开发的BDS/GPS双模定位模块,采用了低功耗抗干扰GNSS SoC 芯片UC6226,主要特征如下:
1)集成度高,功耗低(53mw),尺寸小(16mm×12.2mm×2.4mm),抗干扰能力强,可以在复杂电磁场环境下工作;采用24 引脚,SMD 表面贴装封装技术,极大地方便了生产;
2)UM220-ⅣN 模块可以满足BDS 和GPS 单系统导航定位,同时可以进行BDS/GPS 双模块联合导航定位,可直接输出NMEA 数据不需要外接CPU;
3)BDS 系统亚太地区定位精度为10m,速度精度为0.2m/s,授时精度达10ns.BDS/GPS 双模块水平定位精度为2.5m CEP,速度精度为0.1m/s.模块冷启动需30s,热启动1s.工作温度−40℃~+85℃,存储温度−45℃~+90℃,可在极端气候环境下使用.
4)UM220-ⅣN 定位模块中BDS 和GPS 模块灵敏度对照如表1.

表1 BDS 和GPS 灵敏度对照dBm
选择UM220 第四代产品UM220-ⅣN 定位模块,可实现复杂环境中对UUV 的高精度定位,该定位模块可方便的与STM32 单片机进行信息传输,也可以连接PC 机,运用软件实现定位功能.图4 为UM220-ⅣN 定位模块结构框图.

图4 UM220-IV N 定位模块结构框图
3.3 无线通讯模块
无线通讯模块是UUV 信息传递的中介,对整个UUV 的导航定位及控制至关重要.本文中无线通讯模块采用RS485 串口电路,5G 通讯模块及北斗短报文模块协同作用,实现BDS 卫星端、船载定位终端及地面控制端之间数据信息的双向交换.RS485 串口相较于工业广泛运用的RS232 串口数据传输速率更高(达到10Mbps),传输距离更远(达到3000m),采用平衡驱动器和差分接收器的组合,抗噪声干扰性好.满足多数工业中信息的传输.5G 通信技术是目前移动通信技术发展的最高峰,其具有高速(最高可达10Gbit/s)、低功耗、低延时性能,是目前以及未来时间段内工业无线数据传输的主流.UUV 在近海活动中,当海上环境剧烈变化,无线通讯难以保证时,北斗定位系统所独有的双向短报文通信就可发挥作用.
北斗短报文通信模块选用北京国翼恒达导航科技公司的GYM2003B,模块采用振芯科技GM4660芯片组研制,通过北斗短报文收发信号的低噪声放大、功率放大、上下变频和基带处理,实现北斗短报文收发及有源定位功能[11].模块集成了BDS 卫星无线电定位系统(RDSS)射频收发芯片,基带电路,功放芯片等,具有BDS RDSS 导航定位、短报文通信及卫星授时等功能.
北斗短报文工作过程是发送方将包含接收方ID 和通讯内容的通讯申请信号加密后通过卫星转发至地面中心站,地面中心站接收到通讯申请信号后,经脱密和再次加密后加入持续广播的出站广播电文中,经卫星广播给用户,用户接收机接收出站信号,解调解密出站电文,完成一次通讯[12].
3.4 上位机模块
上位机模块主要对UUV 采集到的环境数据进行接收、显示和存储,同时监控UUV 路径轨迹的变化.并根据UUV 实际运动情况发送相应的控制指令,上位机软件界面使用Visual C++开发.可方便实现二次开发.船载北斗定位模块将接收到的BDS 定位数据通过无线通讯模块发送给STM32单片机,单片机将数据滤波处理后发送给上位机显示界面,上位机对数据进行读取,显示及存储.上位机的功能主要有信息显示、远程监控以及动态预警等.图5 为上位机工作流程.
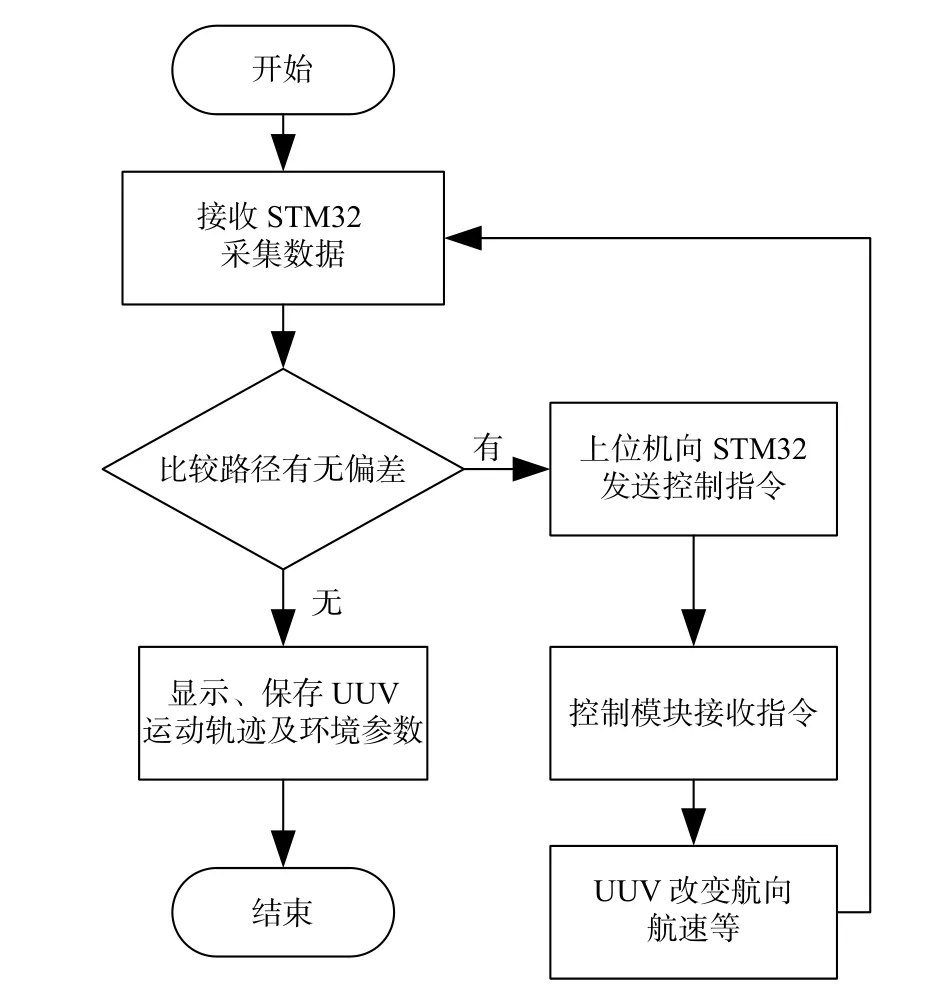
图5 上位机模块工作流程
4 水下测试及分析
在建立了UUV 模型及北斗定位分系统后,对UUV 以恒定速度跟踪目标路径进行水下实验,将UUV 外形简化为一个总长0.85m、宽0.50m、高0.24m 的均质方体,假定其重心与浮心重合.为了验证UUV 路径跟踪情况,将UUV 实际路径起点与目标直线路径起点取不同坐标位置,给定UUV初始状态:初始位置坐标(2,8),初始航向角45°.初始速度0.5m/s,水域流速为0.1m/s,目标路径为坐标(0,0)~(60,60)的直线,目标航向角45°.UUV 开启后,上位机软件向其发送目标路径轨迹,UUV 在北斗定位模块的作用下向目标路径靠近,在坐标点(18,18)处与目标路径重合.图6 为UUV 的路径跟踪实验曲线图.
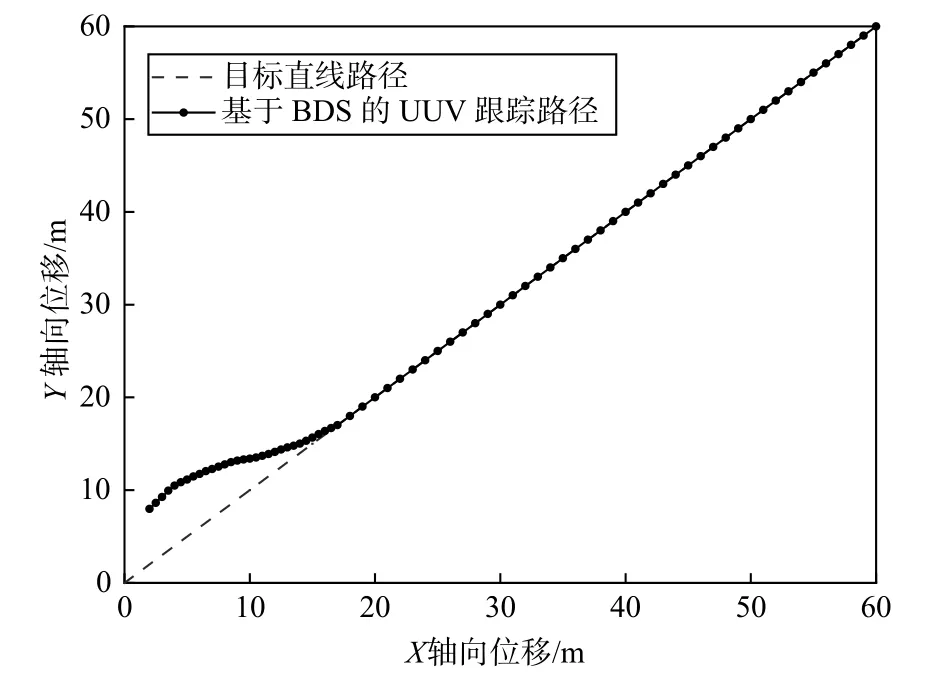
图6 UUV 路径跟踪线图
上位机显示界面在UUV 运行过程中记录多处UUV 经纬度坐标与目标路径经纬度坐标,如表2 所示,通过实验可知,UUV 在初始阶段距离目标路径较远,但在BDS 及上位机、单片机的共同作用下,UUV 不断向目标路径靠近,并最终沿着目标路径运动,在路径终点采集水质信息并运动到下一采集点.导航定位分系统运行状况良好,并能及时修复路径偏差.提高了近海UUV 的路径跟踪的精度.
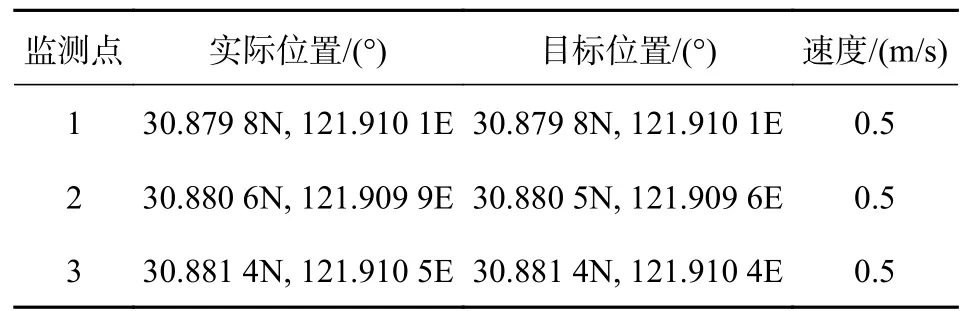
表2 UUV 目标位置与实际位置经纬度对照
UM220-ⅣN 定位模块不仅适用于BDS 导航系统也可用于GPS 导航系统,为了验证BDS 在UUV路径跟踪方面的精度,选取在GPS 作用下UUV 的路径跟踪实验,比较两者导航定位性能的优劣.图7 为两种导航方式下UUV 路径跟踪经纬度测试数据折线图,通过比较UUV 真实曲线数据,BDS 测试数据以及GPS 测试数据可以清晰地看到,由于BDS 定位系统是具有同步轨道并能支持三个频率工作的系统,在亚太地区BDS 的定位精度和GPS 不相上下,甚至比GPS 定位精度更高,完全满足近海UUV 的定位导航及路径跟踪.
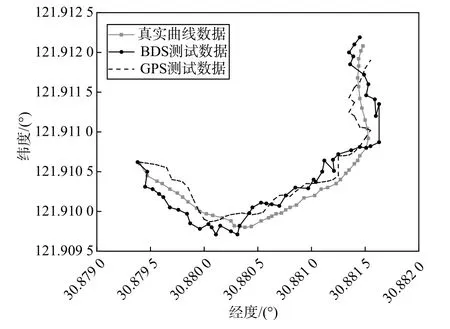
图7 经纬度测试数据折线图
5 结论及展望
通过将我国自主研发的北斗定位模块运用到UUV 上,确保了UUV 能够实时改变自身航向跟踪目标直线路径,北斗定位模块实时获取UUV 的位置坐标及航向信息,通过无线传输模块将UUV 坐标信息发送到高性能STM32 单片机,经过单片机模块的中值滤波及卡尔曼滤波,消除数据噪声及缺陷数据.上位机模块接收到来至单片机的数据后,一方面分析,显示及保存;另一方面比较UUV 实际路径与目标路径偏差,通过高性能STM32单片机将新的控制指令发送给运动部件,控制UUV 的航向,同时采用北斗短报文通信实现了极端环境无线信号难以抵达的条件下北斗定位模块,高性能STM32 单片机及上位机信息的双向传输.通过各模块协同配合实现了近海UUV 精确的路径跟踪.
由于深海中无线信号很难抵达,所以选择BDS作为导航定位系统的UUV 只能在近海海域工作,未来要想走向深海,还需要研究基于水声定位系统或惯性导航系统(INS)的导航定位方式.复合导航及多种控制方式结合的UUV 将是发展的趋势.
猜你喜欢
汽车电器(2022年9期)2022-11-07 02:16:24
铁道通信信号(2020年4期)2020-09-21 09:15:24
电子制作(2019年20期)2019-12-04 03:51:14
中国外汇(2019年11期)2019-08-27 02:06:30
车迷(2018年12期)2018-07-26 00:42:22
电子制作(2017年7期)2017-06-05 09:36:13
中国老区建设(2016年3期)2017-01-15 13:53:26
山东工业技术(2016年15期)2016-12-01 05:31:14
铁道通信信号(2016年8期)2016-06-01 12:10:21
学习月刊(2015年3期)2015-07-09 03:51:04