基于铱星突发信号的导航定位技术研究
2021-05-24 04:51:00
全球定位系统 2021年2期
(航天恒星科技有限公司,北京 100095)
0 引言
全球导航卫星系统(GNSS)可向全球用户提供全天候、无缝覆盖的定位、导航以及授时服务,在国家安全和经济发展各领域发挥着巨大的作用[1-2].但是随着用户需求的不断提高和复杂环境下的应用拓展,GNSS 的“脆弱性”也逐渐暴露:一是GNSS 基本导航服务能提供的定位精度只有10m 左右,无法满足高精度用户的需求;二是GNSS 卫星大多为中高轨卫星,轨道高度约为20~30km,卫星导航信号经过空间损耗到达地面时已十分微弱,不足以提供室内、城市峡谷、树林遮挡等场景下的可靠连续定位服务;此外,由于卫星导航民用信号的频点和结构是公开的,易受欺骗和干扰,所以在复杂电磁环境下存在一定的安全隐患[3].由此可见,GNSS 导航系统在极端情况下可用性严重下降,其精确性、可靠性和抗干扰性等都亟待提升.
低轨卫星系统具有较高的信号落地功率、较低的信号空间损耗以及较好的多普勒特性,这些特点恰好可以弥补GNSS“脆弱”之处.因此,借助低轨卫星增强GNSS 服务或者作为GNSS 的有效备份逐渐成为导航领域的一项热点研究内容.美国的铱星系统是目前唯一已实现全球覆盖的低轨卫星系统,其地面终端接收到的信号强度比GPS 强大约30dB.铱星系统提供的定位与授时(STL)服务是低轨导航领域一项重要突破,该系统已经具备作为GPS 备份或补充的能力[4],有效提高了用户在信号遮蔽甚至GNSS 拒止条件下的导航定位服务性能.但受限于保密等政策限制,其技术细节并未得到公开发表.
本文面向基于低轨通信卫星的导航技术开展相关研究,首先对铱星STL 突发信号进行深入研究及解析;然后提出利用STL 突发信号实现非合作导航定位的方法;最后,通过实收信号进行定位解算,进一步对STL 突发信号非合作导航方法进行验证.
1 铱星STL 突发信号体制
铱星星座作为当前唯一投入运营并提供成熟STL 服务的低轨卫星系统,已成为低轨导航定位的技术标杆.本节对铱星STL 突发信号体制及系统服务性能进行研究分析.
1.1 信号体制
铱星信号频率范围在1616~1626.5MHz,总带宽10.5MHz.其中STL 信号占用后0.5MHz(1626~1626.5MHz)的单工信道播发[5].单工信道分为12 个信道,包括4 个消息信道(Messaging channel)和一个振铃警报信道(Ring Alert channel),每个信道频宽41.667kHz,又细分为工作频宽31.50kHz 和保护频宽10.17kHz.铱星单工通道频带分配如表1 所示.
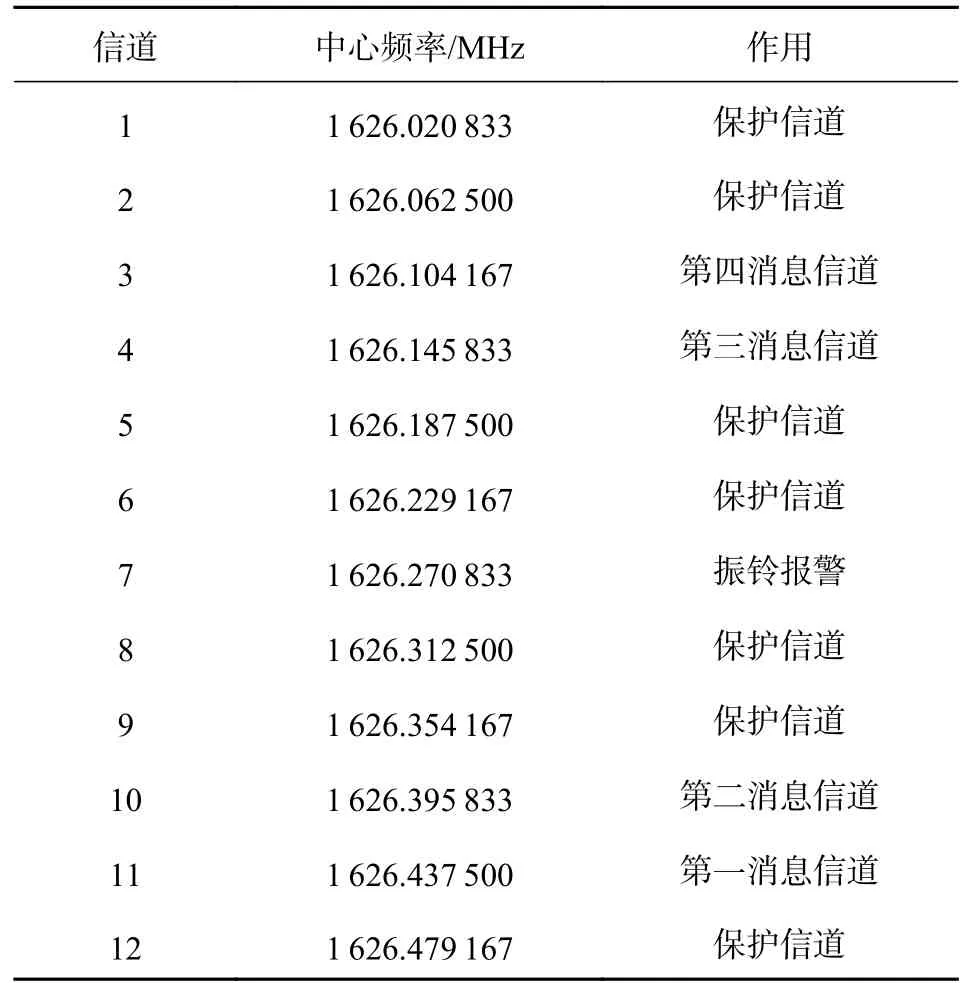
表1 铱星单工通道频带分配表
根据铱星系统通信链路帧结构设计,每帧时隙长度为90ms,整个时隙平均传输2250 个符号,符号速率为25ksps,数据速率为50kbps.其中STL 信号通过前20.32ms 的单工时隙播发.
STL 信号实际上是经过特别设计的包含必要导航定位信息的突发信号,称为STL Burst,其结构如表2 所示.
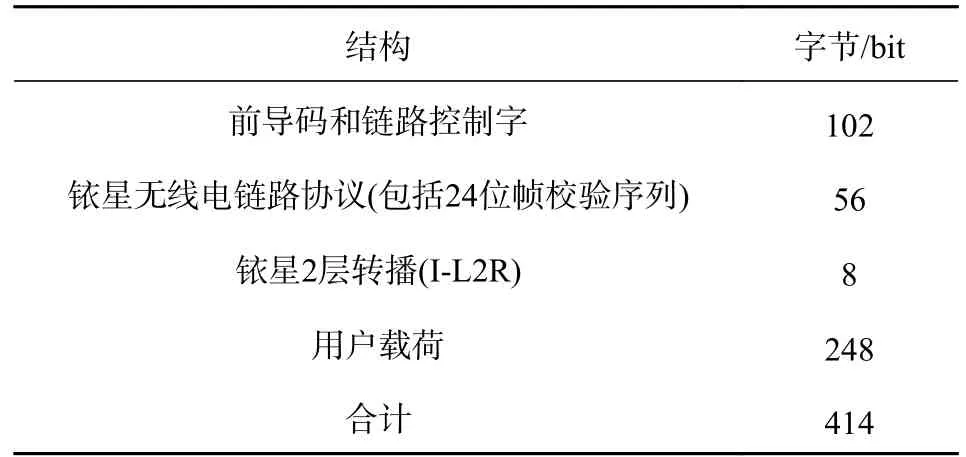
表2 突发信号结构表
STL 突发信号分为四个主要数据字段,如图1 所示,前导码(Preamble),唯一字(Unique Word),链接控制字(Link Control Word)和有效载荷字段(Payload Field).前导码和唯一字主要在接收解调器中用于突发采集(burst acquisition)和频率快速捕获,上行链路和下行链路的前导码和唯一字是不同的.链路控制字段提供用于控制用户链路的低速率信令信道,上行链路和下行链路业务信道使用相同的链路控制字格式.链路控制字用于支持相关控制信道传输协议的链路维护、切换和ACK/NAK,链路控制字字段由前向差错控制(FEC)码保护.有效载荷字段是提供承载任务数据和信令消息的主业务信道,支持3466.67bps的通道比特率,通常的纠错编码和其他信令(overhead)功能在这个信道上提供标称信息吞吐量2400bps.该字段携带任务数据(mission data)和任务控制数据(mission control data),任务数据可以是话音数据或宽带数据服务.对于话音业务,通过专用声码器确保铱星通信通道的高质量话音服务性能;对于数据业务,L波段传输使用帧校验序列来提供无差数据传输服务.
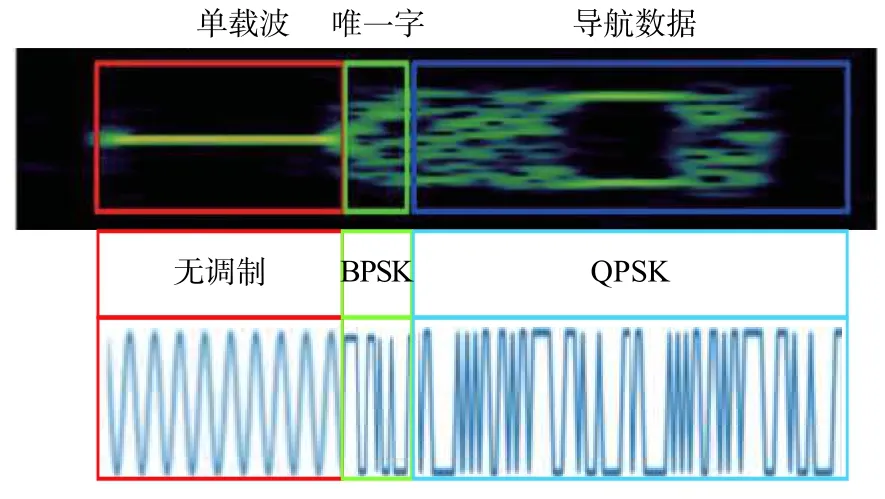
图1 STL 突发信号结构示意图
1.2 服务性能
对于铱星STL 服务,白皮书对其定义为:当GNSS表现不佳时,提供一个广泛可用的定位信号;当GNSS 运行良好时,提供难以欺骗的时间和位置解决方案,来验证GNSS 定位结果[6].因此,对于授权用户而言,STL 系统已经具备作为GNSS 备份或补充系统的能力,可以实现GNSS 拒止条件下的导航定位服务,通过相关实测试验,得到的STL 精度如图2 所示.其中室内定位精度能达到55m(保留90%精度好的点的平均精度值),授时精度约为200ns[7].
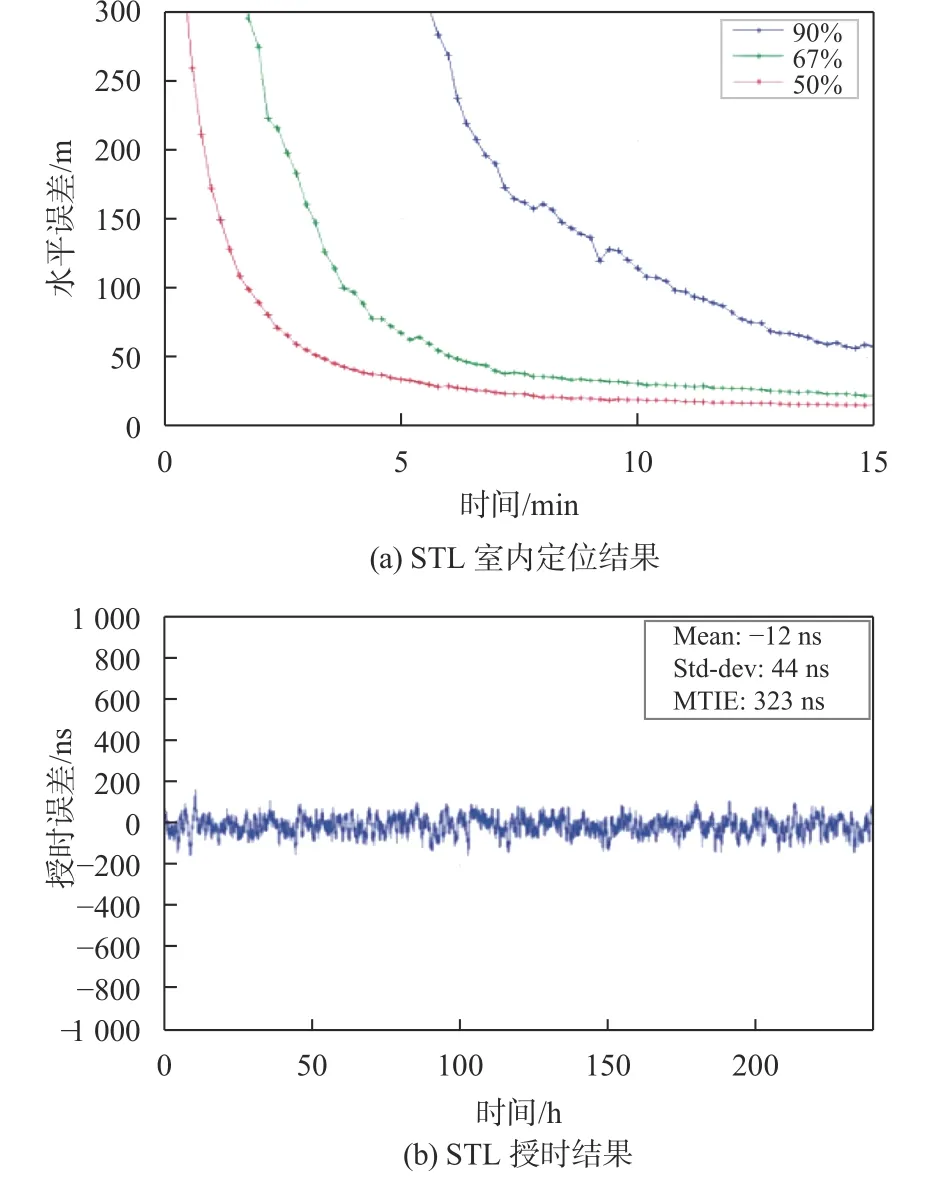
图2 STL 定位授时精度
进一步的,本文对STL 与GNSS 信号相关特性进行了比对,结果如表3 所示.由表3 可知,相较于GNSS,STL 具备强抗干扰、抗欺骗以及室内定位能力,能够有效地为GNSS 提供降级备份服务.
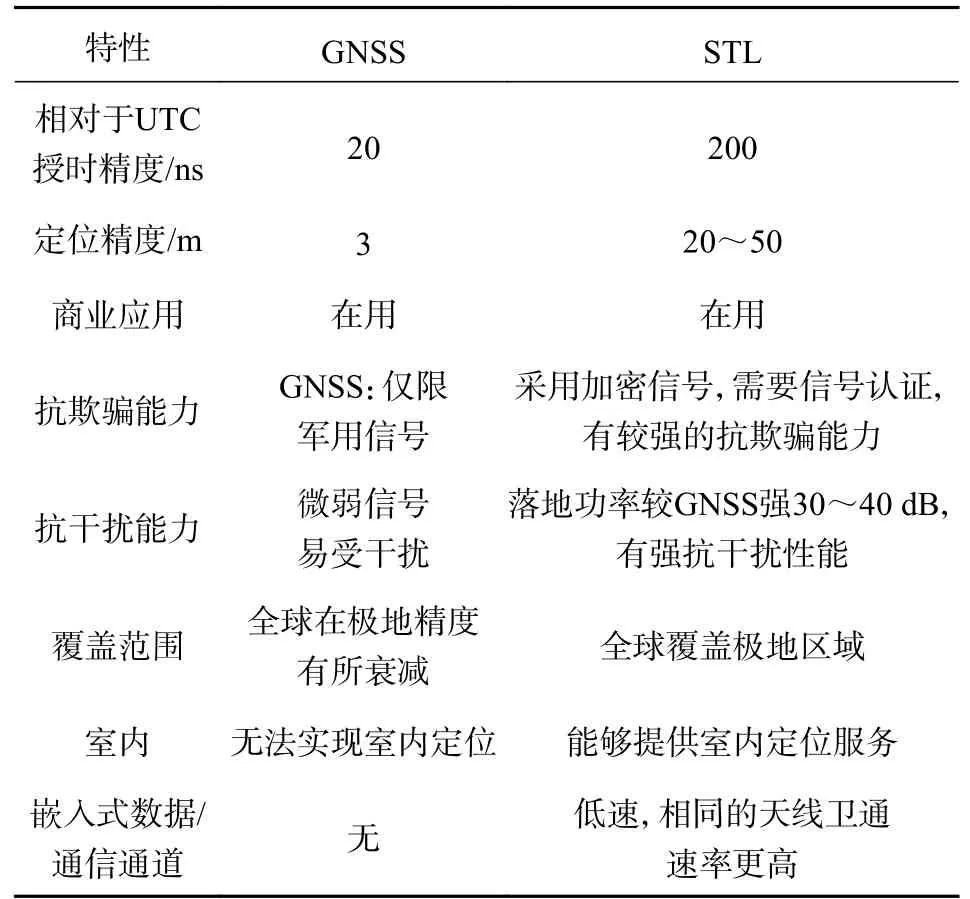
表3 STL 与GNSS 性能对比
2 基于低轨突发信号的用户位置解算
根据铱星系统覆盖性能可知,全球大部分区域难以同时观测到4 颗以上的低轨卫星,因此,铱星系统无法采用类似于GNSS 的伪距定位方法.而低轨卫星轨道高度低,运行速度快,与用户之间具有较好的多普勒观测特性,可借助多普勒观测信息进行定位解算[8-9].另外,铱星STL 突发信号经过特定的编码,其数据通道中含有伪随机序列,采用伪距和多普勒测量值联合解算的定位技术能够进一步提升定位精度,实现低轨卫星独立导航定位服务.本节首先介绍基于多普勒信息的定位原理,然后对伪距和多普勒联合定位技术进行研究.
2.1 基于多普勒信息的定位原理
根据无线信号的多普勒效应原理,用户接收到的信号频率与卫星发射的信号频率之间的关系为

式中:fd为多普勒频移,

vr为卫星速度在卫星与用户接收机路径方向上的投影,可表示为

因此,在第个i个时刻的多普勒观测量可表示为
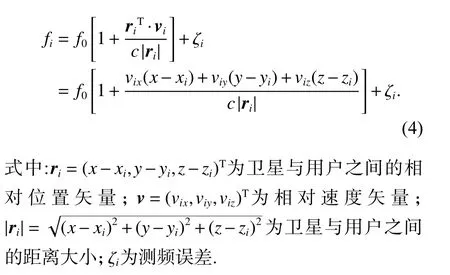
根据上述多普勒表达式可知,在空间中,某时刻与卫星运动方向成θi(卫星和用户接收机连线与卫星速度方向的夹角)的所有坐标点组成一个以卫星位置为顶点、圆锥角为θi的圆锥面,该锥面称为多普勒等频圆锥面,与地球表面相交形成一条曲线AOB,称为多普勒等频锥线[10],如图3 所示.
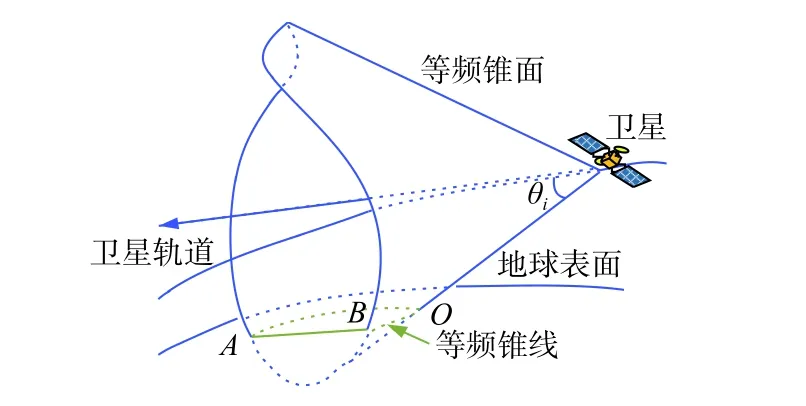
图3 多普勒等频锥面示意图
当观测到同一卫星两个不同时刻或者两颗不同卫星时,可以得到两个等频锥面,与地球表面形成两条等频锥线,这两条锥线相交于点1 和点2,如图4所示.消除镜像模糊后,可求解出用户所在位置,模糊位置可以通过增加测向信息或利用多个轨道面的结果来消除.
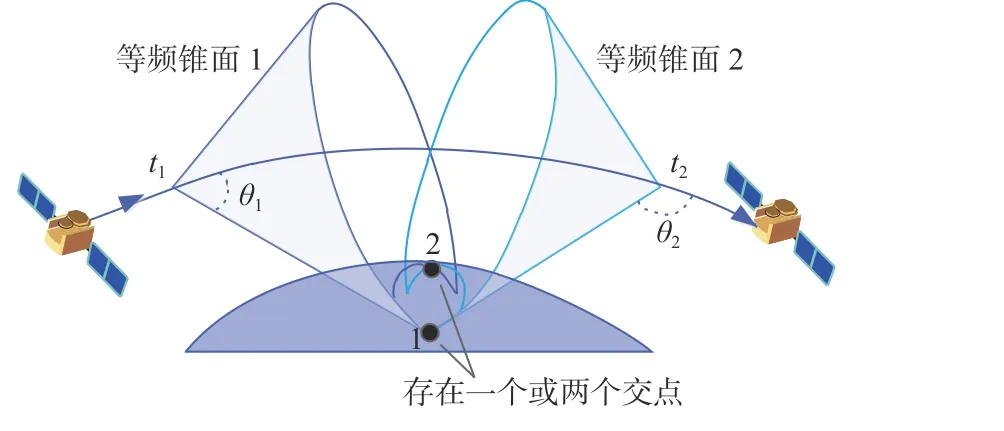
图4 两个多普勒等频锥面相交示意图
由上述分析可知,假设卫星的位置、速度、信号发射频率已知,则可对单颗卫星进行多次不同时刻观测或对不同卫星进行同时观测;当获取4 个或4 个以上的多普勒观测值后,可实现用户位置以及接收机频率测量偏差的解算.
本文利用最小二乘法[11]对多普勒观测方程组进行解算,首先对观测方程进行线性化获得状态转移矩阵,设定初始解为α0=[x0,y0,z0]T,将方程一阶泰勒展开,得到如下方程式:
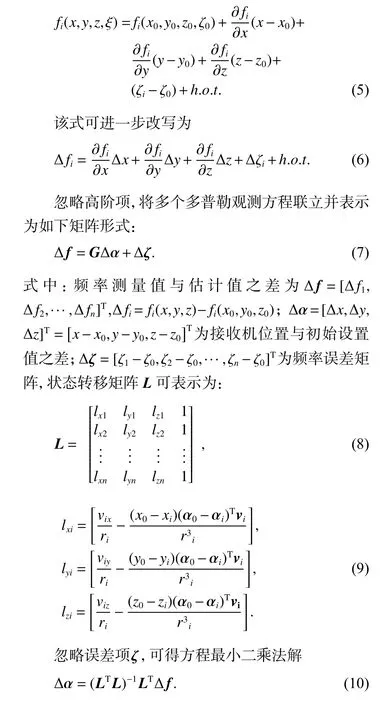
在第一次求解完成之后,可以用求得的结果作为下一次求解的初始值进行迭代运算,直至两次迭代后的解算结果之差小于某个预先设定的迭代门限向量δ,则求解过程收敛,求得的坐标即为用户终端的最终估计值.

2.2 伪距和多普勒测量值联合定位技术
铱星STL 突发信号数据通道中含有伪随机序列,通过播发伪码结合多普勒测量来进一步提升系统定位性能.在空间中,基于伪距定位方程可获得以卫星为中心的球面;基于多普勒定位方程可获得以卫星为顶点的等频锥面.球面和锥面分别与地球表面相交,获得镜像定位点与真实定位点.伪距多普勒联合定位图如图5 所示.
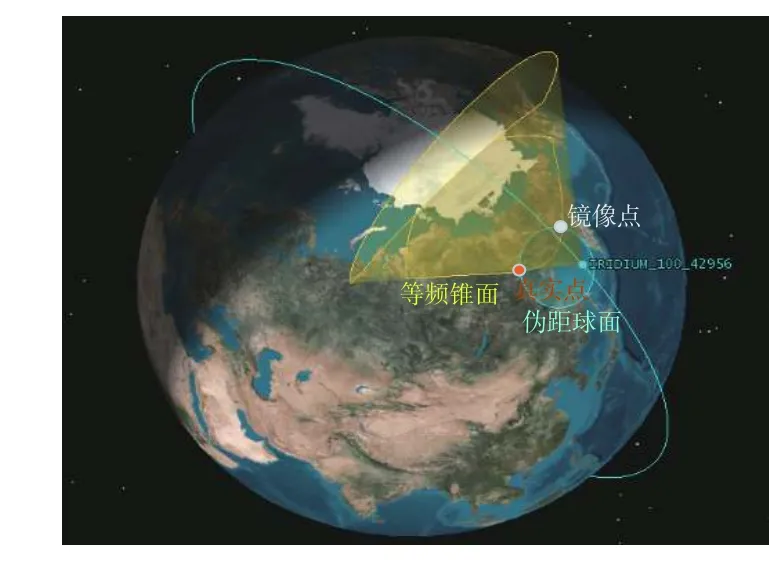
图5 伪距多普勒联合定位示意图
下面对伪距和多普勒测量值联合定位解算过程进行理论推导.伪距和多普勒联合定位方程组可以表示如下:
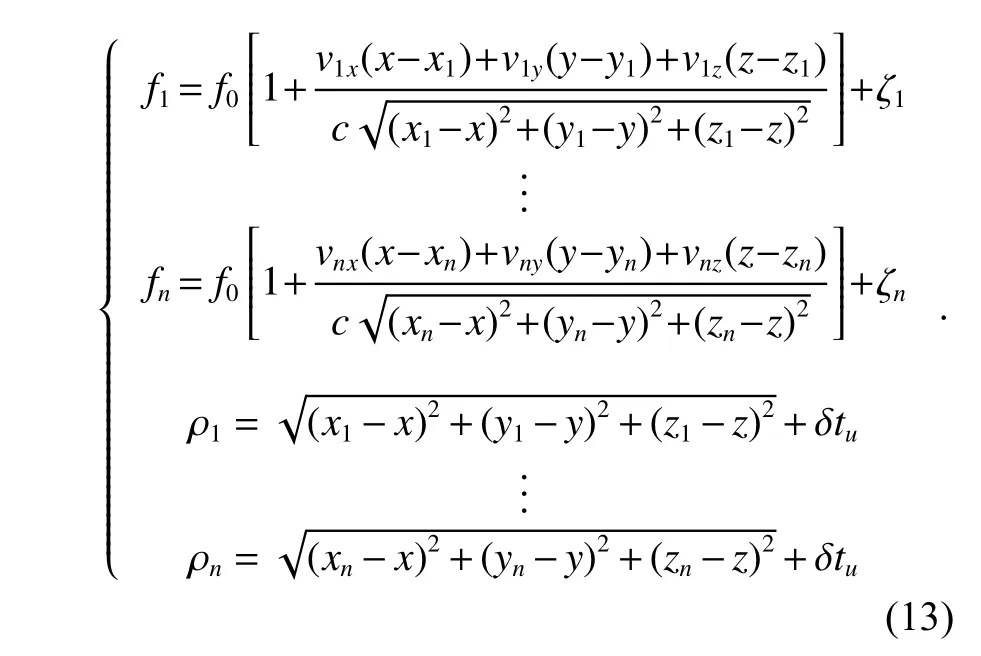
式中:前n行方程为多普勒定位的观测方程;后n行为伪距定位的观测方程;f1到fn表示n个STL 信号的频率测量值;ρ1到ρn表示n个STL 信号的伪距修正量;ζ1为测频误差;δtu为接收机钟差,定义为用户时钟超前于卫星时钟部分,即δtu=t−t1.
联合定位方程仍是一个非线性方程组,因此采用与多普勒定位求解算法相同的线性化与最小二乘的思想进行解算,其解算过程如下:
设定初始解为α0=[x0,y0,z0,ζ0,δtu]T,将两类方程一阶泰勒展开,得到如下方程式:

类似的,在第一次求解完成之后,可以用求得的结果作为下一次求解的初始值进行迭代运算,直至两次迭代后的解算结果之差小于某个预先设定的迭代门限向量δ,则求解过程收敛,求得的坐标即为用户终端的最终估计值.

3 STL 时频解析及定位性能分析
由于铱星STL 服务主要面向美国军方用户[12],本文仅能采用非授权的方式对铱星信号开展采集与解析试验.本节针对STL 非合作突发信号的导航定位方法进行研究,首先对突发信号进行现场采集及解析,然后基于非合作突发信号开展定位解算试验.
3.1 最大多普勒频移计算
低轨卫星的高动态特性使其具有较大的多普勒频移,多普勒信息是低轨卫星的重要参数之一[13-14].本节对铱星信号最大多普勒频移进行计算,用以验证接收信号的正确性.
在假定接收机静止不动的情况下,估算仅由卫星运动所造成的接收信号载波多普勒频移的最大值.估计图如图6 所示.
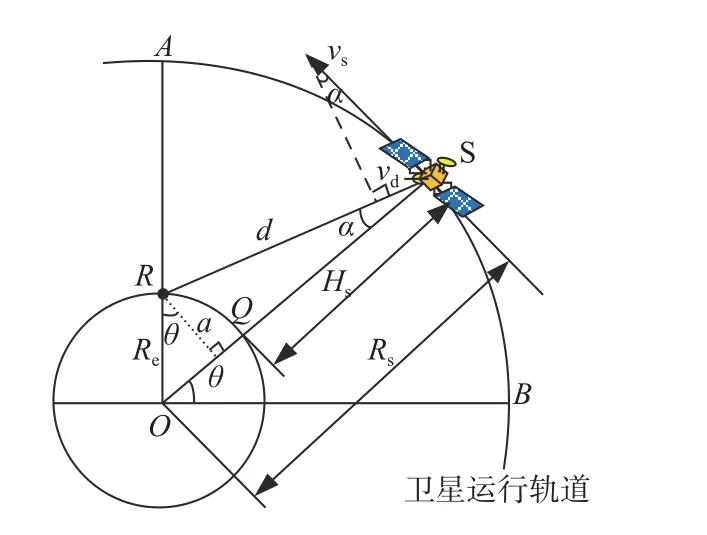
图6 载波多普勒频移最大值估算
过R点做OS垂线a,可得到如下关系:

根据余弦定理得到vd与θ的关系如下:

式中:地球半径Re为6371km,卫星S 到地心O的距离为Rs=Re+Hs=6368+780=7148 km;卫星运行的线速度vs=Rs·ω=Rs·2π/t=7485 m/s.
为了求得vd的最大值,将vd对θ求导,并令导数为零,可得到关于sinθ的一元二次方程,求解得θ值如公式(27).
此时vd的绝对值在该θ值时最大:

可计算出卫星投影速度为vdm时所引起的载波的最大多普勒频移绝对值fdm为:

可以利用式(29)计算出载波的最大多普勒频移作为铱星STL 突发信号采集的频率捕获搜索范围,同时验证接收信号的正确性.
3.2 STL 突发信号采集及解析
为了分析和验证STL 突发信号导航定位功能,本文对铱星信号进行实收采集解析,采集到的信号如图7 所示.
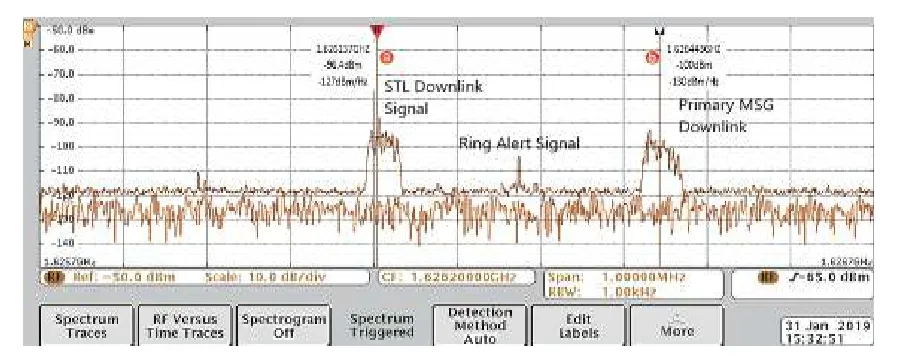
图7 信号数据采集
由信号采集结果可得到接收信号的载波频率为1626.137MHz;多普勒频移约33KHz,位于频率搜索的有效范围内,验证了采集信号的有效性.
进一步提取铱星信号中STL 部分进行解调,得到幅值及相位结果如图8 所示.
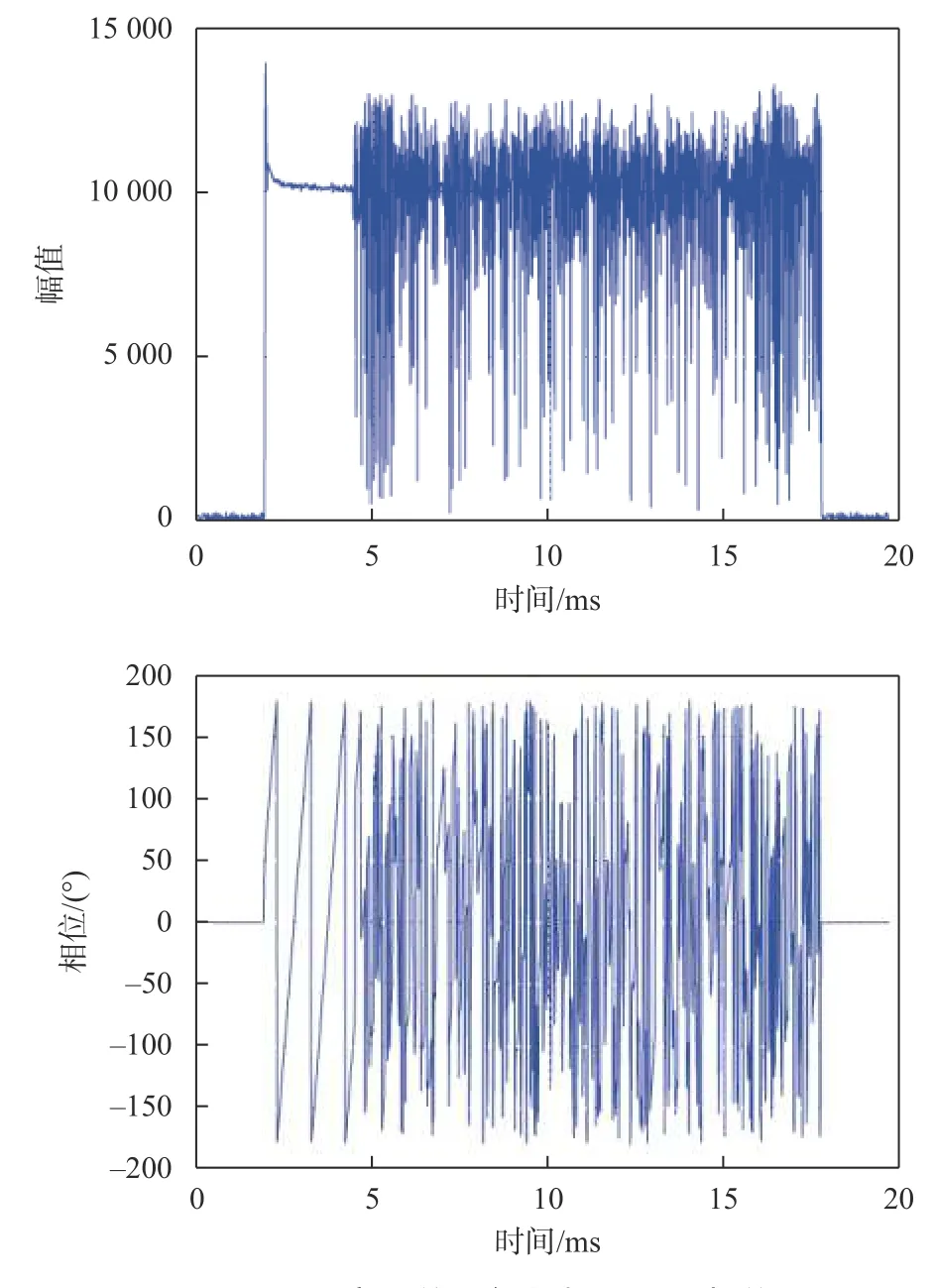
图8 STL 突发信号解析幅值图和相位图
对采集的信号进行窄带滤波处理,滤除接收机高频信号噪声,得到结果图如图9 所示.
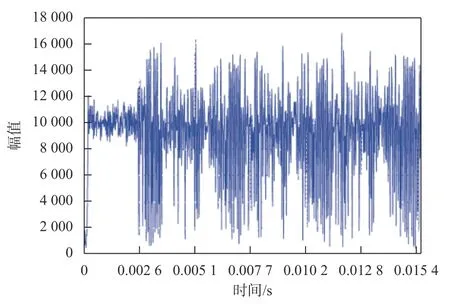
图9 窄带滤波后的数据解析图
由图可以看出,前导波约为2.6ms,唯一字及导航数据部分由于调制了伪码及电文,未发现明显数据规律.进一步的,对窄带滤波后的信号采用本地产生的同频载波进行混频,然后进行低通滤波,得到结果如图10 所示.
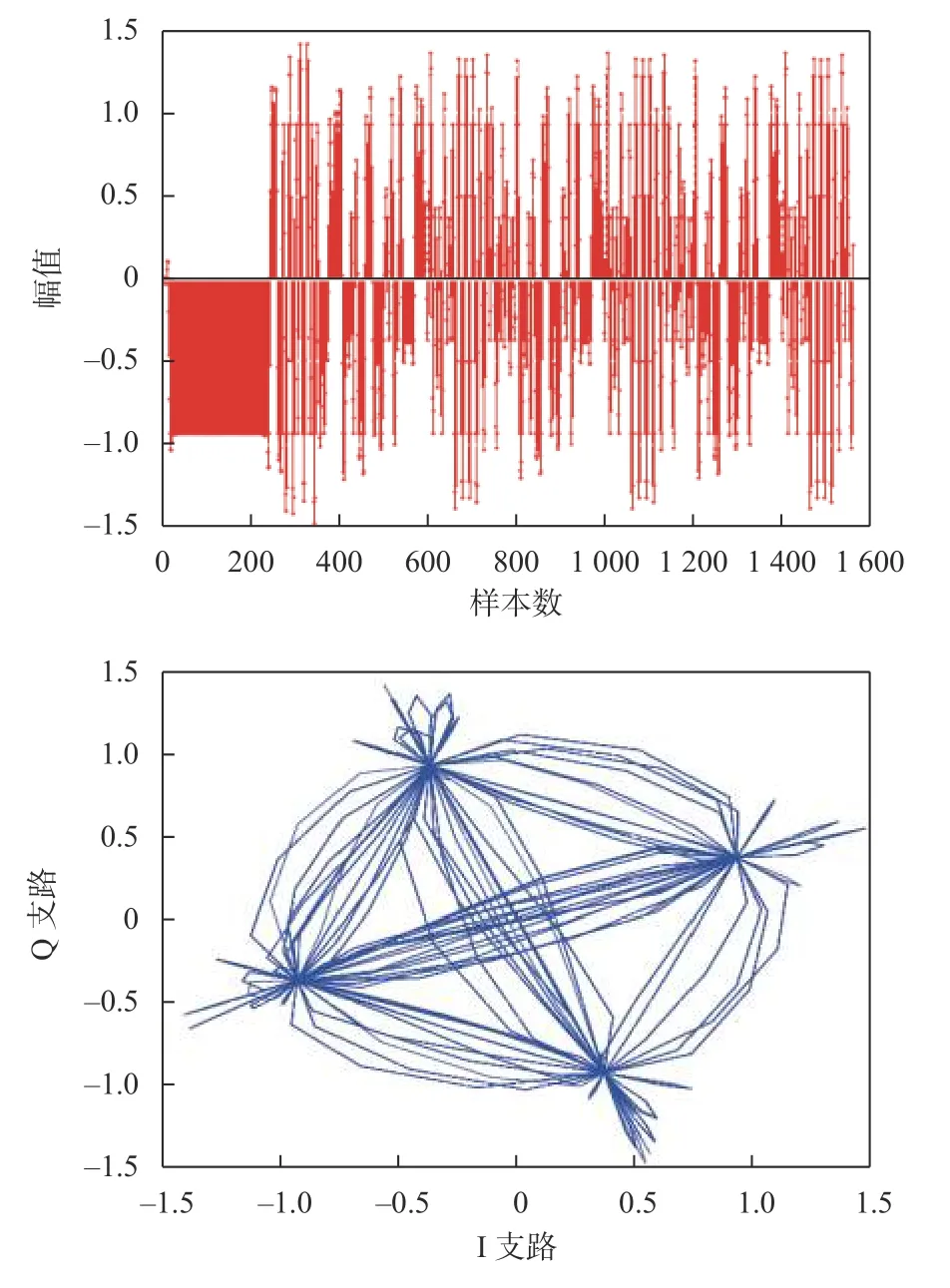
图10 混频后信号及I-Q 数据
参照调制数据速率25ksps[15-17],下变频后基带数据的I-Q 图和基带数据的相位图如图11 所示.
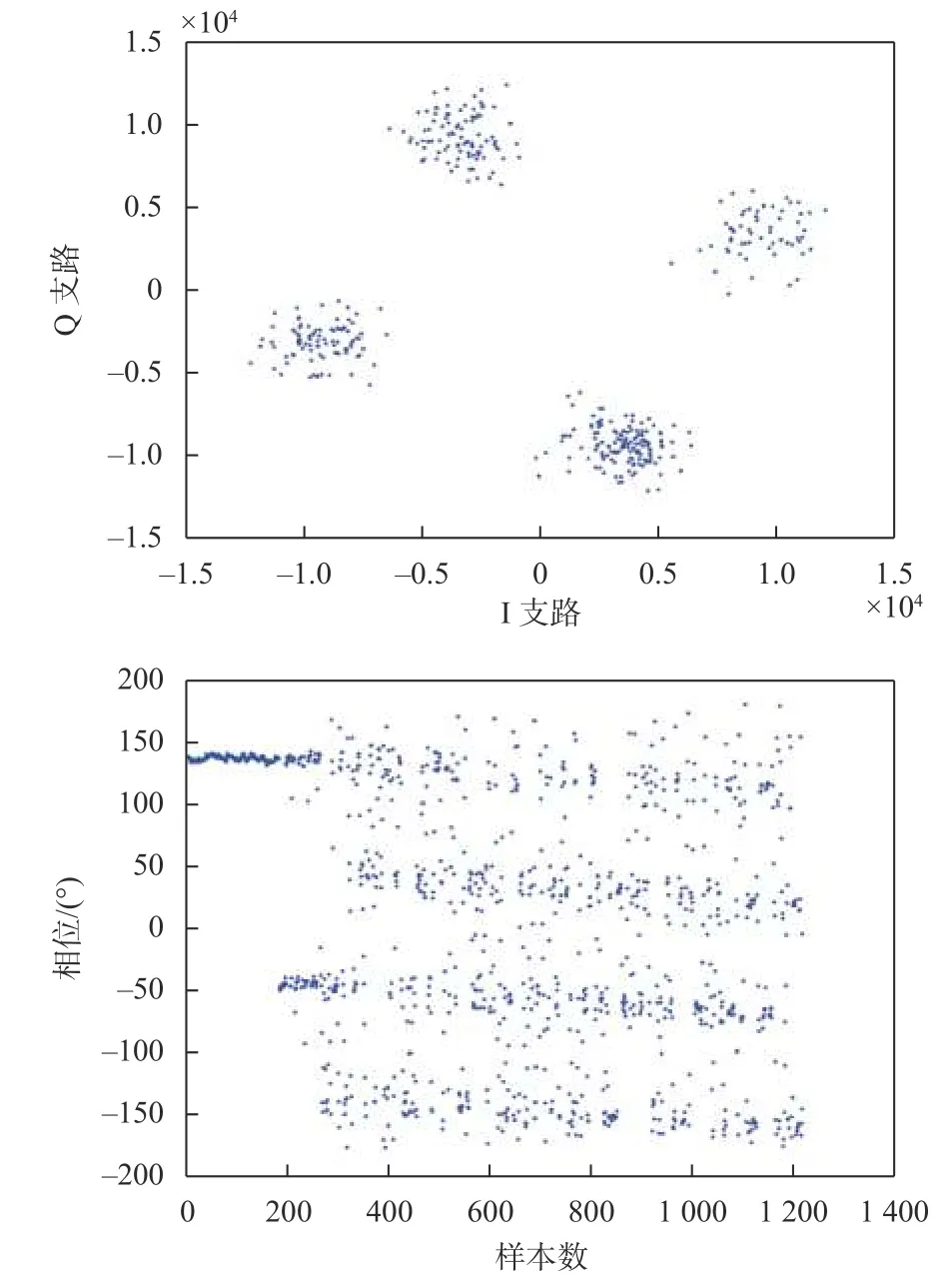
图11 基带数据及相位图
综上所述,根据实收信号试验解析结果,铱星STL 突发信号占用通道3(第4 消息信道)播发,播发频点为1626.104MHz,信号持续时间约为5ms~20.32ms,信号周期约为1.3~1.4s.信号前2.6ms 为单载波,BPSK 唯一字部分及QPSK 数据部分由于调制了伪码及电文,且界限无法完全确定,尚未完全实现载波剥离.
3.3 非合作突发信号定位解算性能分析
借助实际采集到的STL 突发信号,对开阔环境下静止用户终端定位性能进行评估,试验位置选取北京市海淀区(北纬40.06°,东经116.16°).铱星星座轨道分布示意图如图12 所示.
图12 铱星星座轨道分布示意图
根据铱星轨道两行根数[18-19]进行星座可见星分析,能够统计出不同时刻用户终端可见卫星颗数,分析统计结果如图13 所示.
由图13 可以看出,用户终端在任意时刻至少可见1 颗卫星,大部分时间段内可见到2~4 颗卫星,少部分时间段可见5~7 颗卫星.当用户可见卫星少于4 颗时,采用多历元伪距多普勒联合定位算法;当可见卫星数大于4 颗时,单历元多星数据即可实现位置解算.试验场景选取2020-12-08T13:40—13:55 时段进行定位试验,可见星情况及定位误差如图14 所示.
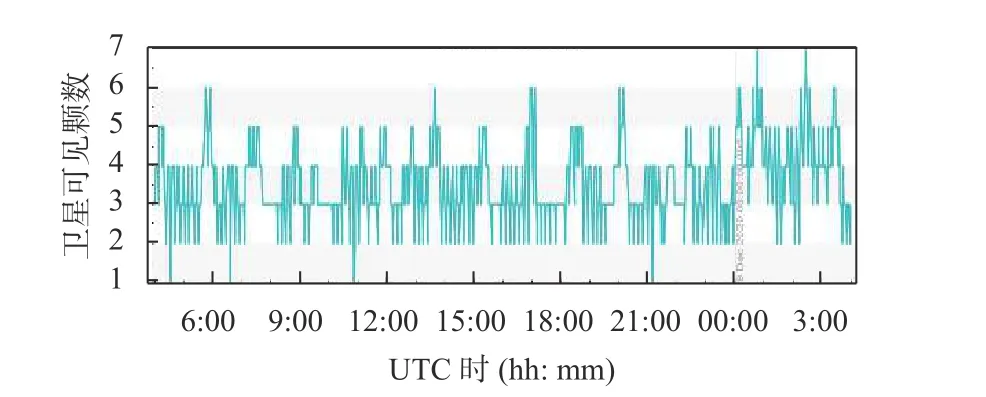
图13 不同时刻可见卫星情况
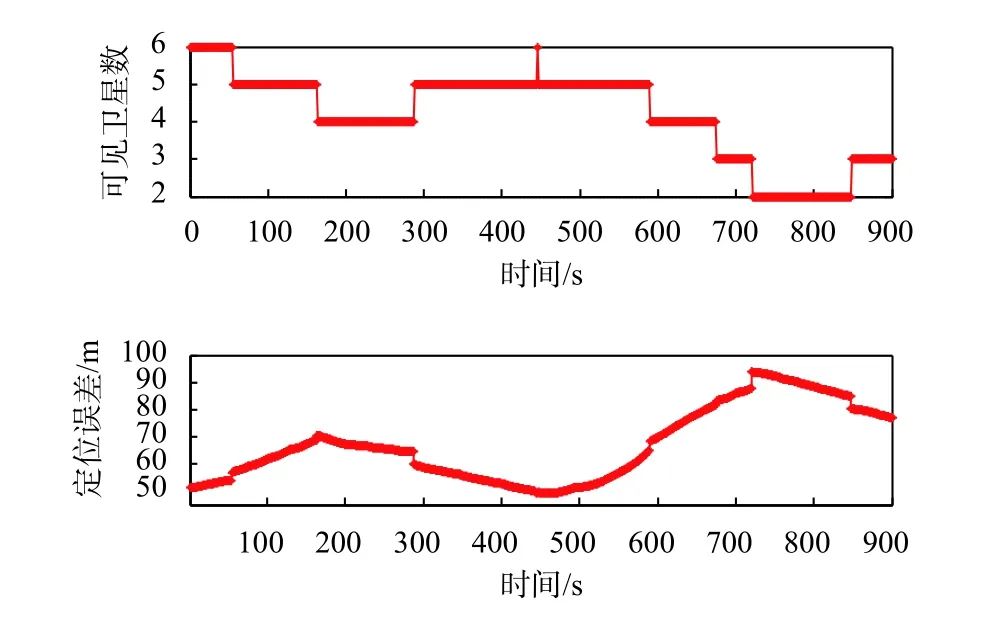
图14 可见卫星情况及定位结果
由实验结果可知,实收铱星STL 突发信号在非合作定位条件下的精度能够达到100m,并且随着接收机可见卫星数的增多,定位误差基本呈现进一步降低的趋势.
4 总结
在世界主要航天国家都积极开展低轨卫星领域的开发与部署的背景下,如何应用低轨卫星技术实现PNT 的增强、备份和补充的研发及实践方兴未艾.针对当前唯一投入运营并提供成熟导航服务的STL 信号开展相关研究及解析,能为我国低轨导航技术的发展起到重要借鉴意义.本文首先对铱星系统STL 突发信号体制进行分析和介绍;其次,采用时频混合方法对信号结构和时频特性进行解析,实现了前导波的载波剥离;最后,对非合作条件下的STL 突发信号定位解算性能进行试验验证,进而实现了优于100m 的定位精度.相关研究成果能够为我国低轨导航系统建设提供理论基础,有效推进下一代卫星导航系统持续发展.
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:10
移动通信(2021年5期)2021-10-25 11:41:48
北京航空航天大学学报(2019年9期)2019-10-26 02:30:00
测绘科学与工程(2017年3期)2017-08-16 02:46:08
太空探索(2017年7期)2017-07-25 09:28:03
测绘通报(2016年12期)2017-01-06 03:37:13
百科探秘·航空航天(2016年3期)2016-11-07 07:06:07
太空探索(2016年12期)2016-07-18 11:13:43
导航定位学报(2015年2期)2015-06-05 09:27:38
中国交通信息化(2014年3期)2014-06-05 03:07:09