机载预警雷达测角误差对探测航迹影响分析
2021-05-24 04:50:46姚华飞幸涛鲁卫红
全球定位系统 2021年2期
姚华飞,幸涛,鲁卫红
(1.中国电子科技集团公司第二十七研究所,郑州 450000;2.中国人民解放军空军装备部驻郑州地区军事代表室,郑州 450000)
0 引言
现代机载预警雷达系统技术体制先进、平台位置高,对远距离低空目标具有突出的探测优势,但需攻克因载机平台运动、姿态变化带来的目标检测与跟踪等技术难题.同时为满足信息化网络战争的战术要求,则需要将机载预警雷达探测点的航迹信息通过坐标变换将目标位置从雷达极坐标系转化到大地坐标系(经度、纬度、高度)下,对目标进行数字地图定位,以便实现与其他作战单元的信息实时共享[1],目前采用载机导航的位置与航姿实时解算等技术可有效支撑因载机运动平台姿态变化及目标在大地坐标系下点航迹位置的实时测算.
机载预警雷达点航迹质量直接关系到作战指挥决策、火力打击效果,目标航迹作为雷达的最终产品,其质量一直受到设计单位、鉴定试验方及用户的重点关注,因此需通过必要的实装试飞检验其航迹跟踪性能是否满足战术指标要求.考核指标方式可选择均方根误差(RMSE)、圆概率误差(CEP)等,从而验证预警雷达系统设计的正确性、精确度.检飞中将机载预警雷达探测航迹与精度更高的目标差分GPS 等基准位置数据对比分析,可检验其探测航迹是否满足设计要求.为深入分析问题原因,通过建立正向(大地坐标系转换至雷达极坐标系)和逆向(雷达极坐标系转换至大地坐标系)推导的各坐标转换模型,并进行仿真计算与验证,可有效分析对其误差产生的深层关联因素,有助于明晰误差传递途径,促进机载预警雷达的研制改进.
1 问题说明
在某机载预警雷达探测过程中,载机转弯段预警雷达探测直线飞行的目标出现航迹弯曲现象,通过对比目标GPS 位置数据得以证实,预警雷达目标航迹偏离目标实际航线较严重,如图1 所示.
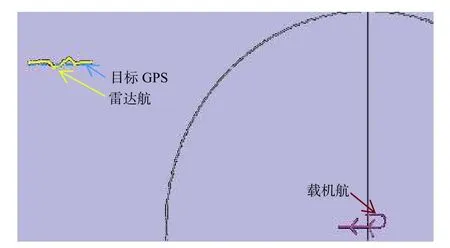
图1 探测态势
国内的一些雷达专家从载机姿态变化对杂波谱影响和杂波抑制算法进行了分析与研究[2-4].文献[5]、文献[6]在此基础上从载机姿态变化导致杂波谱和目标回波功率的变化,对目标检测性能影响进行分析,以上研究均属于目标信号处理的范畴.结合本次试飞中机载预警雷达探测跟踪实际情况,应该将问题定位至雷达测量误差与数据处理的环节.文献[7]提及了载机姿态变化、安装误差对测高精度的影响,但未建立数学模型对探测跟踪性能加以分析.关于类似问题,文献[8]中也有提及.文献[8]中分析认为载机拐弯时航迹弯曲主要是由方位角测量误差大引起.
文献[8]中作者认为,载机拐弯飞行时,雷达转台不处于水平状态,其姿态随着飞机姿态的变动而不停的变动.此时,探测到的目标方位角为雷达极坐标系的方位角α,即雷达转台面上载机航向与雷达对目标的瞄准线之间的夹角,不是雷达所处的水平面上载机航向与雷达对目标的瞄准线之间的夹角αd.若把α当成αd,然后作航迹图,就会出现航迹弯曲.几何关系如图2 所示.

图2 载机姿态与雷达方位测角几何关系
本文关注的机载预警雷达根据实际载机姿态对目标测量方位角进行了空间坐标转换,没有直接利用所测的方位角αd作航迹图,文献[8]的分析不适用于本文讨论的雷达航迹偏差问题,所以需分析雷达实际点航迹测量值,信息处理的坐标转换流程,理清误差传递途径、定位关键影响因素.
2 原因剖析
机载预警雷达探测目标首先是通过对雷达脉冲的多重复周期解模糊测出目标精确距离,利用雷达天线在方位与俯仰值的波束扫描,经过必要的测角方法获得目标相对雷达方位与俯仰值,再通过点迹凝聚等算法,得到相对于雷达极坐标系的斜距r、方位角α、俯仰角β的点迹数据[9],经过波门相关、平滑滤波,然后结合任务导航设备实时提供的载机航向、横滚、俯仰等姿态角数据,进行坐标转换得到目标的经度L、纬度B、高度H航迹位置数据.根据经度、纬度数据,在预警雷达显示态势图上标绘出目标航迹点位置.因此目标航迹弯曲问题因从雷达测距、测角源头入手进行分析和排查.
该机载预警雷达采用相扫体制,天线方位波束窄,方位测角精度高;俯仰波束宽,俯仰测角精度相较方位测角精度低.当存在测角误差时,态势图上目标点位置便发生上下左右的偏移,导致显示的目标航迹偏离实际航迹位置,如图3 所示.当载机转弯发生滚动,姿态发生变化时,目标相对预警雷达的角度α、β发生变化,测角误差导致的地图位置误差范围区拉长,雷达态势图上航迹线偏差加大,如图4 所示.

图3 载机水平状态时,由测角误差导致的地图投影位置
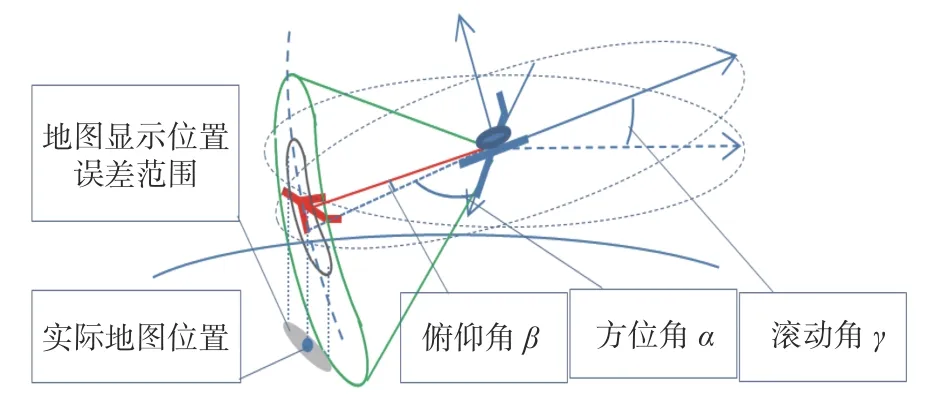
图4 载机转弯横滚状态时,由测角误差导致的地图投影位置误差加大
一般而言,雷达系统测角的随机误差导致的航迹应该以实际航迹线为中心随机起伏,容易通过航迹跟踪平滑处理算法消除;测角的系统误差导致的航迹应该始终偏离实际航迹线,无法通过航迹跟踪平滑处理算法消除,只能通过对系统误差进行修正.
若天线测仰角存在固定偏差θ(高度差),则飞机俯仰、横滚姿态变化时带来的位置偏差如图5 所示.
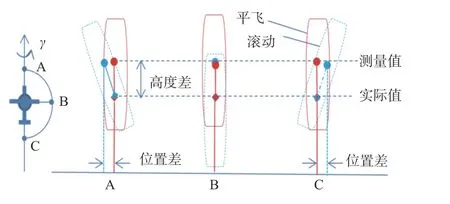
图5 飞机平飞与滚动两种状态下,测高系统误差导致的态势图中位置误差在A,B,C 三个典型方位的情况
从投影位置分析可见,在载机转弯过程中,目标相对载机的方位发生变化,若俯仰维测角存在系统偏差,则得到的航迹点位置相对实际的位置发生左右摆动,即航迹发生弯曲,通过将雷达航迹高度数据与目标差分GPS 或ADS-B 系统高度基准数据误差计算分析,发现预警雷达探测航线目标确实存在7000m~10000m 的测高系统误差,初步证明了俯仰测角系统误差将导致载机在转弯姿态变化过程中雷达探测航迹弯曲的推断,但需采用仿真建模分析进一步印证此问题的原因.
3 建模仿真分析
3.1 正向转换模型
为了验证上文的分析,本文编写了VB 程序,根据实际飞行数据,设置仿真中目标、载机的位置、姿态,绘制飞行轨迹图,并通过大地坐标系(L,B,H),地心直角坐标系(X,Y,Z),载机地理直角坐标系(Xd,Yd,Zd),载机直角坐标系(Xt,Yt,Zt),雷达极坐标系(r,α,β)之间的坐标转换模型,将飞行试验中目标机在大地坐标系下的经度、纬度、高度基准数据转换形成目标在雷达极坐标系下的r、α、β基准数据值.
设目标沿直线运动,t时刻目标经纬高为(Lt,Bt,Ht);载机沿椭圆轨迹运动,t时刻载机经纬高为(L0,B0,H0).载机姿态角为:偏航角ϑp、俯仰角ϑf、滚转角ϑg,如图6 所示.

图6 载机位置、姿态飞行轨迹图
则目标在地心直角坐标系的坐标(X1,Y1,Z1),载机在地心直角坐标系的坐标(X0,Y0,Z0)

目标相对载机的位置在地心直角坐标系中为[X1−X0,Y1−Y0,Z1−Z0]T.
目标相对载机的位置在载机地理直角坐标系中为[10-11]

目标在载机直角坐标系中坐标为(Xt,Yt,Zt)

则目标在雷达极坐标系中的实际位置(r,α,β)

3.2 逆向转换模型
通过正向转换得到目标相对于预警雷达极坐标数值基准r、α、β值,然后叠加可能存在的系统误差,并将叠加误差后的雷达极坐标数值通过逆向坐标转换,得到目标在大地坐标系下的仿真航迹数据.
若雷达存在测角误差∆α 和∆β,则雷达实际测量值为(r,α+∆α,β +∆β).根据模拟的雷达测量值(r,α+∆α,β +∆β),利用雷达极坐标系到载机直角坐标系的转换公式、载机直角坐标系到载机地理直角坐标系的转换公式、载机地理直角坐标系到地心直角坐标系的转换公式、地心直角坐标系到大地坐标系的转换公式,推导出目标经纬高坐标测量值(,,)[10-11],具体转换过程为:
目标在载机直角坐标系中坐标为(,,)

目标相对载机的位置在载机地理直角坐标系中坐标为

载机在地心直角坐标系的坐标为(X0,Y0,Z0),目标在地心直角坐标系中坐标为


3.3 仿真计算
根据目标实际坐标(L,B,H)、测量值(L´,B´,H´)分别作图,以证明由于测角误差∆α和∆β导致的态势图中目标航迹偏差的推断.同时,改变测角误差∆α、∆β以及载机姿态角,并进一步分析不同因素对航迹偏差的影响程度.
仿真构建载机转弯飞行态势,参数设置:经度173.467 6°~173.8479°,纬度19.5718°~19.6725°,高度7500m,右转弯,横滚角−0.5329°~20.7587°,俯仰角3.0377°~4.2517°;机载航向角(正北方向为0°):90.32°~180°、−180°~−101.4°;目标参数:经度171.0656°~171.6691°,纬度20.5186°~20.5693°,高度8000m、航向274.6167°.载机转弯段位置、姿态数据(横坐标为导航设备采样序列号,纵坐标为对应的位置、姿态数据)如图7 所示.
通过3.1 节的正向转换模型,计算得到目标在载机雷达坐标系的r、α、β真值,在此真值的基础上分别叠加方位、俯仰角系统误差.设预警雷达测角分三种情况:1)无系统偏差,∆α=0°,∆β=0°;2)有方位系统误差,∆α=2◦,∆β=0◦;3)有仰角系统误差,∆α=0◦∆β=2◦,.如图8 所示.

图7 载机转弯段位置/姿态数据
再由3.2 节的逆向转换模型得到,机载预警雷达探测目标航迹仿真结果如图9 所示.

图8 机载预警雷达探测目标方位与俯仰角叠加误差显示

图9 预警雷达探测航迹仿真结果
可见,机载预警雷达测角系统误差可导致目标航迹偏离.在机载预警雷达载机转弯,平台姿态发生变化时,方位系统偏差导致航迹弯曲小,但航迹整体平移大;俯仰角测角系统偏差虽导致航迹整体平移小,但航迹弯曲较严重.仿真计算结果与理论分析、试验试飞中机载预警雷达航迹的弯曲现象基本一致.据此证明,机载预警雷达仰角测量存在系统误差,导致探测目标航迹弯曲,需要校正.
按照文献[12]中关于预警雷达探测精度系统误差的计算方法,得出俯仰角系统误差的估计值,后经相关雷达技术人员对天线安装偏差引起仰角的1.5°测量固定偏差进行校正后,航迹弯曲现象得以解决.
4 结论
本文对某型机载预警雷达探测过程中,出现的预警雷达探测目标航迹出现弯曲现象进行了深入地剖析,建立了坐标转换矩阵,并编写了仿真分析程序.通过构建与实际探测相似的载机与目标飞行态势数据,引入设定的预警雷达仰角系统误差,获得了与实际现象一致的仿真结果.证明了当机载预警雷达系统存在仰角系统误差时,载机转弯段预警雷达平台姿态发生变化,从而引发探测目标航迹弯曲现象.本文的分析对于及时解决机载预警雷达工作中暴露的问题发挥了重要的作用,有效促进了机载预警雷达系统的研制改进.
猜你喜欢
航天电子对抗(2022年4期)2022-10-24 13:38:28
南京航空航天大学学报(2022年2期)2022-04-27 01:45:38
航天电子对抗(2018年3期)2018-07-14 02:53:30
电子测试(2018年6期)2018-05-09 07:31:54
北京航空航天大学学报(2017年4期)2017-11-23 05:48:25
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
系统工程与电子技术(2016年7期)2016-08-21 13:58:58
测绘科学与工程(2016年6期)2016-04-17 06:51:25
火控雷达技术(2016年2期)2016-02-06 02:29:04
装备环境工程(2015年5期)2015-02-28 01:20:35