基于探索者平台的全地形机器人设计与实现
2021-05-17 08:14:38郑灵洁胡晓军陈静仪
湖州师范学院学报 2021年2期
郑灵洁,胡晓军,陈静仪,朱 丽,韩 婧
(湖州师范学院 工学院,浙江 湖州 313000)
随着我国科学技术的不断进步,我国在机器人技术、信息技术、制造技术等领域取得了较大突破.机器人可以替代人进行信息采集、山地救援、救火救灾等,发展势态良好,应用前景广泛[1-4].近年来,机器人技术的发展能为我们的生活、工作带来何种便利已成为研究热点.如何有效地设计一款机器人结构和控制程序,以提高其适应复杂地形的能力成为首要的研究方向.目前对全地形机器人的结构设计主要有履带式、轮式、仿生式等[5],但这些设计都不能达到预期的效果.如履带式机器人运行平稳,但爬坡性能差;轮式机器人行走效率高,但越障性能差;仿生式机器人行走能力突出,能够适应不同地形,但设计复杂,运行效率低等.本文依据探索者工具箱提供的零部件,通过分析现有的全地形机器人的优缺点,提出一种新型的双履带连杆全地形机器人结构设计方案.该机器人运行平稳,可通过连杆变换机器人的运行状态,实现重心调整,能较好地适应坡道、管道、栅格等复杂地形.
1 机器人行走原理设计
为使机器人适应多种地形,且能轻松越障,选择运动能力强和爬坡、翻越障碍能力突出的双履带结构;为实现机器人重心的前后转移,设计采用前后两节长短不一的履带和车身后部加装连杆的方法抬升结构.设计原理见图1.

图1 机器人设计简图Fig.1 Sketch of the overall design of the robot
在平坦的陆地运行时,连杆放下,双履带与地面接触,机器人平稳运行.当遇到坡道时,连杆结构[6]带动后轮抬起,并在中轮驱动力的作用下,前轮随坡度抬起迫使后轮着地.爬坡时,前轮与坡度面接触,后轮与地面接触,有效提高机器人的抓地能力,实现平稳爬坡.当爬至坡顶时,连杆带动前轮放下,前轮与坡顶平面接触,实现机器人坡顶的平稳过渡.机器人下坡的原理与上坡类似,本文不再赘述.当遇到栅格、路障等较低障碍物时,机器人首先抬起前轮,后轮驱动机器人运动至障碍物处,连杆往复运动,带动前轮做上下运动,通过“滚动+爬行”的方式带动机器人爬上障碍物,然后连杆放下,双履带与障碍物表面接触,机器人平稳通过障碍物.
2 机器人结构设计
探索者工具箱包含传动轴、垫片、舵机双折弯板、大轮、小轮、履带、支架、连杆、U形架等百余种组件.机器人结构模型主要采用16片小轮、4条履带、4根连杆、33块连接板、2块孔平板、4台电机、4个支架和其他连接部件制成;动力系统由4台直流电动机、1台舵机和电源组成.
2.1 机器人结构设计
机器人车身采用“承载式”方案设计,即车身不包含车架,仅由连杆、悬架、前后骨架等模块构成.机器人的三维设计、装配[6]见图2,实物模型见图3.底板由2块70 mm×110 mm×3 mm孔平板通过拼接方式构成;底板上部采用折弯T形板和U形板构成电池固定架,底板上部空置区用于安装控制电路板.前轮和中轮的悬架主要由L形板和折弯T形板构成,且悬架结构一端与底板下部连接,另一端与车轮连接.后轮悬架由2块U形板并排连接,并通过中心轴与后轮连接.前骨架主要由连杆、L形板和折弯T形板等部件构成,并固定在底板前端,用于固定灰度传感器和碰撞传感器.后骨架主要由梯形板和U形板构成,并固定在底板后端,用于固定活动连杆的动力部件.活动连杆主要由L形板和折弯T形板构成,其中L形板与后骨架中的动力部件连接,折弯T形板与后悬架连接.前、中、后车轮分别由小轮片和支柱构成,前轮与中轮、中轮与后轮分别通过履带连接,且后轮通过连杆、中心轴等部件与中轮支撑系统连接,为后轮提供旋转支撑.

图2 三维模型Fig.2 3D model

图3 实物模型Fig.3 Physical model
2.2 机器人动力结构设计
机器人行走结构由4条履带和带轮组成,并由4台直流电机分别驱动.采用规格相同的前后带轮带动履带运行,前后履带的交接部位采用直流电机同时驱动,可使机器人稳定、快速地行走.前履带设计长度为后履带设计长度的2/3,可使连杆抬起后重心落在后轮,机器人以后履带着地、前履带抬起的状态完成越障和爬坡.
机器人的承载结构由4个电机支架、8个L型支架和2块孔平板组成.电机支架与直流电机连接作为主要支撑部件;L型支架相互堆叠组成U型支架,一边与电机支架连接,另一边与孔平板连接.机器人的后轮结构采用传动轴和2块双折面板组成,既可保证后轮安装的稳定性,又可固定连杆.
机器人重心变换结构主要由1台舵机、4根连杆组成.舵机通过舵机支架与双足脚连杆连接在孔平板上;舵机主轴与直连杆直接相连,并通过机械手指连杆和L型连杆连接在后轮结构上.机器人抬起连杆就可通过控制后轮改变机器人的重心.
3 机器人控制系统设计
通过原理分析、结构分析和地形分析,全地形机器人控制系统可分为芯片系统、信号反馈系统、行走系统3个模块.本设计将Basra主控板与BigFish 2.1控制板结合作为主控芯片系统,见图4;由3个灰度传感器和1个触碰传感器组成信号反馈系统,见图5;由可充电式锂电池提供动力并驱动4台直流电机带动机器人行走.

图4 控制卡Fig.4 Control card

图5 传感器Fig.5 Sensor
3.1 机器人控制方案设计
在起点打开开关,依靠灰度循黑线前进,检测循线是否准确(避免上台阶偏转).在前进中过坡桥时,触发传感器,引发舵机程序,继而抬起连杆,使后履带轮抬升,重心移至后轮,前轮抬起,爬上坡后放下连杆,使重心重新移至前轮,前轮继续前进,完成爬坡动作.下坡后检测到黑线,降低速度,缓慢调节位置,重新循迹通过管道.出管道后重新调整车身位置,当遇到栅格时,触发传感器,引发舵机程序,继而抬起连杆,使后履带轮抬升,重心移至后轮,前轮抬起,进入栅格后,放下连杆,使重心重新移至前轮,前轮继续前进,驶出栅格.重新检测黑线后停止辅助轮舵机动作,前进到终点,结束全部动作.机器人控制流程见图6.
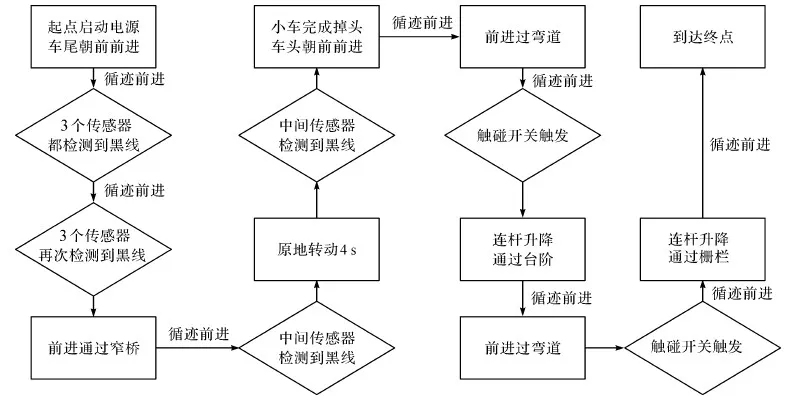
图6 机器人控制流程图Fig.6 Robot control flow chart
3.2 机器人控制程序设计
因机器人控制程序较复杂,本文仅列出舵机运动控制程序段,具体程序如下:
#include
Servo myservo;
int time1=0;
void setup() {
myservo.attach(8);} ∥引脚
void loop() {
if(time1==0){
myservo.write(180); ∥初始位置180度
delay(16000);
time1=1;}
if(time1==1){
myservo.write(180); ∥初始位置180度
delay(1500);
myservo.write(115);∥过栅格65度
delay(2000);}}
4 结 语
全地形机器人应用领域广泛,国内外对全地形机器人的研究还在不断深入,尤其是全地形机器人在太空探测领域的应用[8].本文以探索者工具箱为基础,通过分析机器人的运行原理,分别对机器人的机械结构和控制系统进行设计.经过多次优化设计和程序完善,该双履带结构机器人可平稳地在路面上行走,经过窄桥、栅格时,可通过重心转换将前履带抬起,平稳跨越障碍;配合灰度传感器,机器人可沿着预定轨迹稳定行走.该全地形机器人结构设计简单实用,控制系统可靠,运行高效,可适应复杂地形.
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05 07:29:32
汽车维护与修理(2022年5期)2022-09-06 03:36:14
装备制造技术(2021年4期)2021-08-05 07:39:40
中国石油石化(2021年8期)2021-03-30 12:39:14
石油化工建设(2019年6期)2020-01-16 08:03:42
小学生学习指导·爆笑校园(2019年6期)2019-09-10 04:06:25
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
橡胶工业(2015年4期)2015-02-23 23:29:38
农机使用与维修(2014年11期)2014-11-18 01:32:07
中国自行车·骑行风尚(2014年4期)2014-10-10 05:00:14