
Disturbance observer-based backstepping control for hypersonic flight vehicles without use of measured flight path angle
2021-04-06 10:24YaoLu
CHINESE JOURNAL OF AERONAUTICS 2021年2期
Yao Lu
a Beijing Aerospace Automatic Control Institute, Beijing 100854, China
b National Key Laboratory of Science and Technology on Aerospace Intelligence Control, Beijing 100854, China
KEYWORDS Anti-saturation;Backstepping;Disturbance observer;Flight control;Hypersonic flight vehicle;State estimation
Abstract In this paper a nonlinear control method is proposed for the tracking control of hypersonic flight vehicles.The designed control laws do not utilize the measured flight path angle due to its inferior accuracy in practical engineering.For this,an estimated flight path angle is designed via the measurements of the altitude and velocity.A tracking differentiator is designed for constructing nonlinear disturbance observer which is used to estimate the model uncertainties including the parameter indeterminacies and external disturbances in the channels of velocity and pitch rate. A robust high-order differentiator is introduced to avoid the employment of the measured flight path angle and estimate the lumped disturbance in dynamics of flight path angle.Meanwhile,the possible saturation of the control inputs is considered and compensated by the auxiliary states.The boundness of closed-loop signals is proved through the Lyapunov theory. Comparative simulations are carried out and the results demonstrate the effectiveness of the proposed method.
1. Introduction
The Hypersonic Flight Vehicles (HFVs) have attracted many scholars since they appeared due to their high civilian and military values.1–4Compared to the conventional flight vehicles,the HFVs have some salient characteristics such as high nonlinearity, strong coupling and complex uncertainty, which bring great challenges to their flight controller designs. Therefore,for simplification,most of existing investigations into this topic had only concentrated on the longitudinal channel.
Due to the high nonlinearity of the longitudinal model of HFV, many scholars have designed multifarious flight controllers based on nonlinear methods for HFV.5–12Because the longitudinal model of HFV can be transformed into a strictfeedback form under some reasonable assumptions, the backstepping method is widely introduced to construct the flight controller of HFV. Ref. 13 presented an adaptive robust backstepping controller for the multi-input multi-output attitude control of a near-space hypersonic vehicle. This method combined dynamic surface control used to handle the problem of‘‘explosion of complexity”and radial basis function used to approximate the unknown compound disturbances. Ref. 14 proposed an online recorded data-based composite neural control method using backstepping framework and applied it to hypersonic flight control.This method constructed a prediction error signal to provide additional correction information for neural network weight update, which enhances the learning ability of neural network. A robust adaptive backstepping method based on neural approximation was presented in Ref.15 This method utilized neural networks to tackle unknown non-affine dynamics existed in the longitudinal dynamics of AHVs. An adaptive fuzzy fault-tolerant controller was proposed in Ref. 16 for HFVs including unknown inertial and aerodynamic parameters.This method designed a robust adaptive distributive law to tackle unknown faults. Ref. 17 investigated the finite-time tracking control problem of the HFV and presented a barrier Lyapunov function based controller.This method designed an adaptive scheme to guarantee the finite-time convergent property of HFV dynamics. Besides the flight stability, from a practical viewpoint, some scholars considered the saturation of control inputs further. An adaptive backstepping controller was developed to solve the control problem of HFVs subject to input saturation in Ref. 18 This method employed a modified smooth inverse of the deadzone to compensate for the dead-zone effects and reduce the computational burden.Ref.19 proposed an adaptive nonlinear fault-tolerant control scheme based on backstepping for tackling unknown time-varying actuator faults and control input constraints. This method introduced some smooth functions and a linear time-varying model and estimated the bounds of the time-varying uncertainties to achieve the desired objective.A disturbance observer-based dynamic surface control scheme was presented in Ref. 20 for a flexible HFV under input constraint and aerodynamic uncertainty. This method employed some additional systems to tackle input constraints. Ref. 21 proposed an effective Nussbaum-based control method for addressing the control problem of the HFVs subject to input constraints. This method designed some hyperbolic tangent functions to approximate the non-smooth saturation functions.
The above-mentioned existing methods acquired better control performances in theory. However, for applying them in engineering, some practical problems should be considered.Firstly,the calculations of on-line control commands need the data of flight states which can be obtained via miscellaneous onboard sensors, like pitot, altimeter, inertial measurement unit and so on. Generally, most required flight states can be measured accurately in practical engineering except the flight path angle and angle of attack. This is because hypersonic flight will cause strong influence of aerodynamic heating,which degrades the performance of the air data sensor severely. Utilizing the measured flight path angle or angle of attack to construct the flight controller will cause larger tracking errors, or even instability.22For HFVs, the flush air data sensing system is a possible solution to the measurements of the flight path angle and angle of attack. However, it needs arrange many pressure ports and sensors on the fuselage and increases the costs evidently.23Secondly,besides the uncertainties of the general and aerodynamic parameters of the established model, some unknown external disturbances also influence the dynamics of HFV. For these lumped uncertainties, many scholars proposed many anti-disturbance control methods, such as Disturbance Observer-Based Control(DOBC).24,25Active Disturbance Rejection Control(ADRC).26,27Elegant Anti-Disturbance Control (EADC)28,29and so on, for tackling them. In the study of the controller designs of HFVs,many scholars usually utilized DOBC to estimate the lumped uncertainties and compensate them in control laws.18,20,21,30,31However, in most cases, the disturbance observers were designed under the assumption that the flight state can be obtained accurately and utilized directly. Therefore, if the measured flight path angle is prohibited in controller design, the design of disturbance observer in flight path angle channel will become a difficult problem.Moreover,the possible saturation of control inputs need be considered because it is likely to influence the flight stability.
The motivation of this paper is to propose an engineering oriented flight controller for HFV.For achieving this,the factors including the avoidance of measured angle of attack flight path angle, external disturbances and possible saturation of control inputs are considered. An estimated flight path angle is constructed via the assist of a high-order differentiator for avoiding the use of unreliable measured value. Two nonlinear disturbance observers are designed based on tracking differentiator to estimate the lumped disturbances and derivative of velocity signal. Some compensative variables are designed to ensure the flight stability when the saturation of control inputs occurs and the saturation time is controlled via appropriate choices of parameters. The stability of the closed-loop system is authenticated via Lyapunov theory. Finally, some contrastive simulative experiments are presented to verify the effectiveness of the proposed method. The main contributions of this paper include three points: (A) Only the flight states which are able to be measured precisely are employed to construct the flight controller, which makes the proposed controller more suitable for engineering application. (B)Avoiding the use of flight path angle, a novel method is proposed for estimating the lumped disturbance in flight path angle channel. (C) The proposed controller is able to ensure the flight stability even if the control inputs reach saturation.
The remainder of this paper is organized as follows. The longitudinal dynamics of HFV is stated in the next section.Then, the nonlinear flight controller is developed based on backstepping method. The stability analysis of the closedloop system is performed and the comparative simulations are carried out for verifying the effectiveness of the proposed method. Some conclusions are given in the end.
2. Longitudinal dynamics of HFV
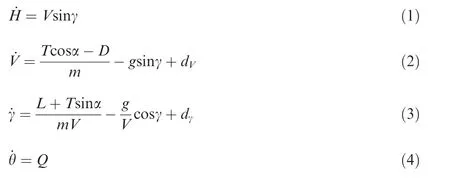
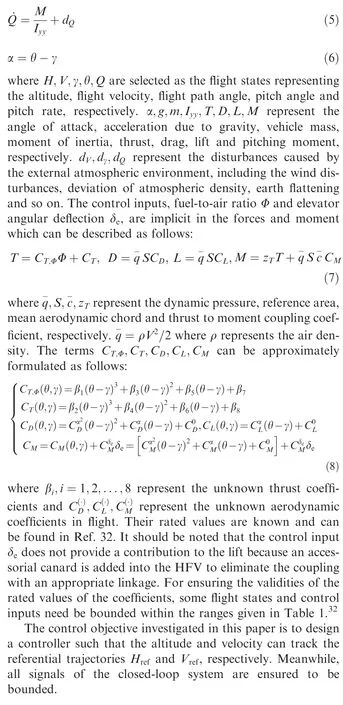
Without the consideration of flexible states, the longitudinal dynamics of HFV can be formulated as follows:
3. Controller design

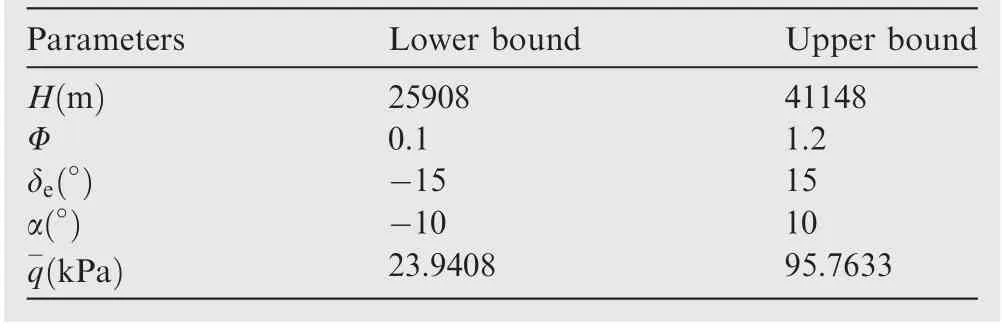
Table 1 Ranges of some states and control inputs.32

3.1. Controller design of velocity subsystem

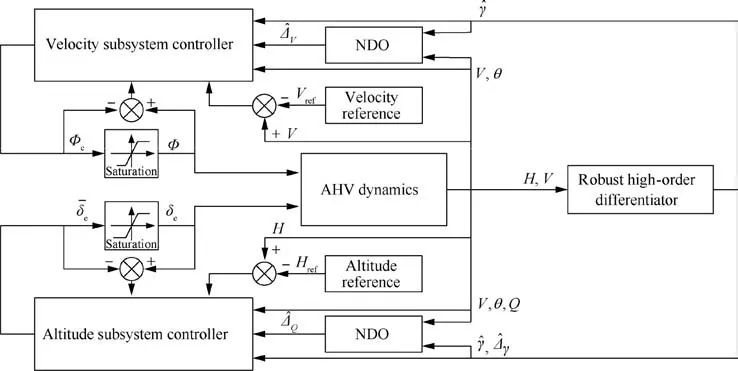
Fig. 1 Structure of the developed control strategy.
where
3.2. Controller design of altitude subsystem
Observing the Eqs.(9)and(36)it can be found that the estimates of the first and second derivatives of altitude are required. This can be achieved via the following robust highorder differentiator35:


4. Stability analysis
5. Simulations
In this section,a numerical fight simulation of HFV is made to verify the effectiveness of the developed control method. The initial flight condition is chosen as:

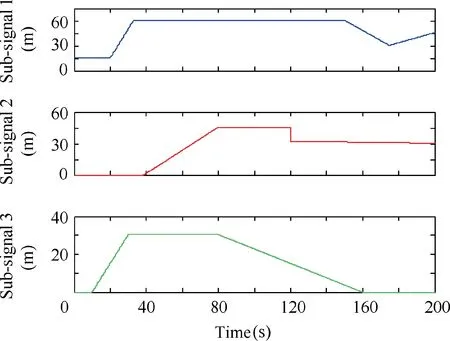
Fig. 2 Three sub-signals for building the velocity reference.

Table 2 Control parameters for simulation.
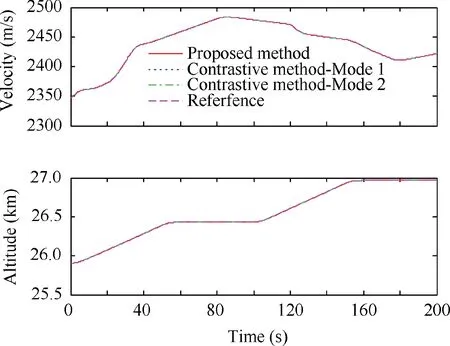
Fig. 3 Tracking curves of velocity and altitude.
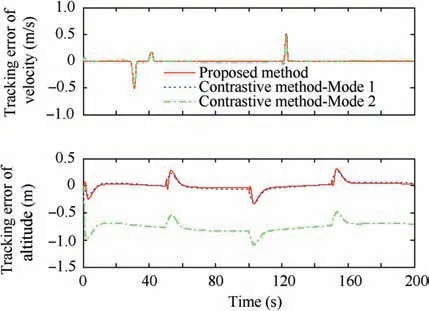
Fig. 4 Tracking errors of velocity and altitude.
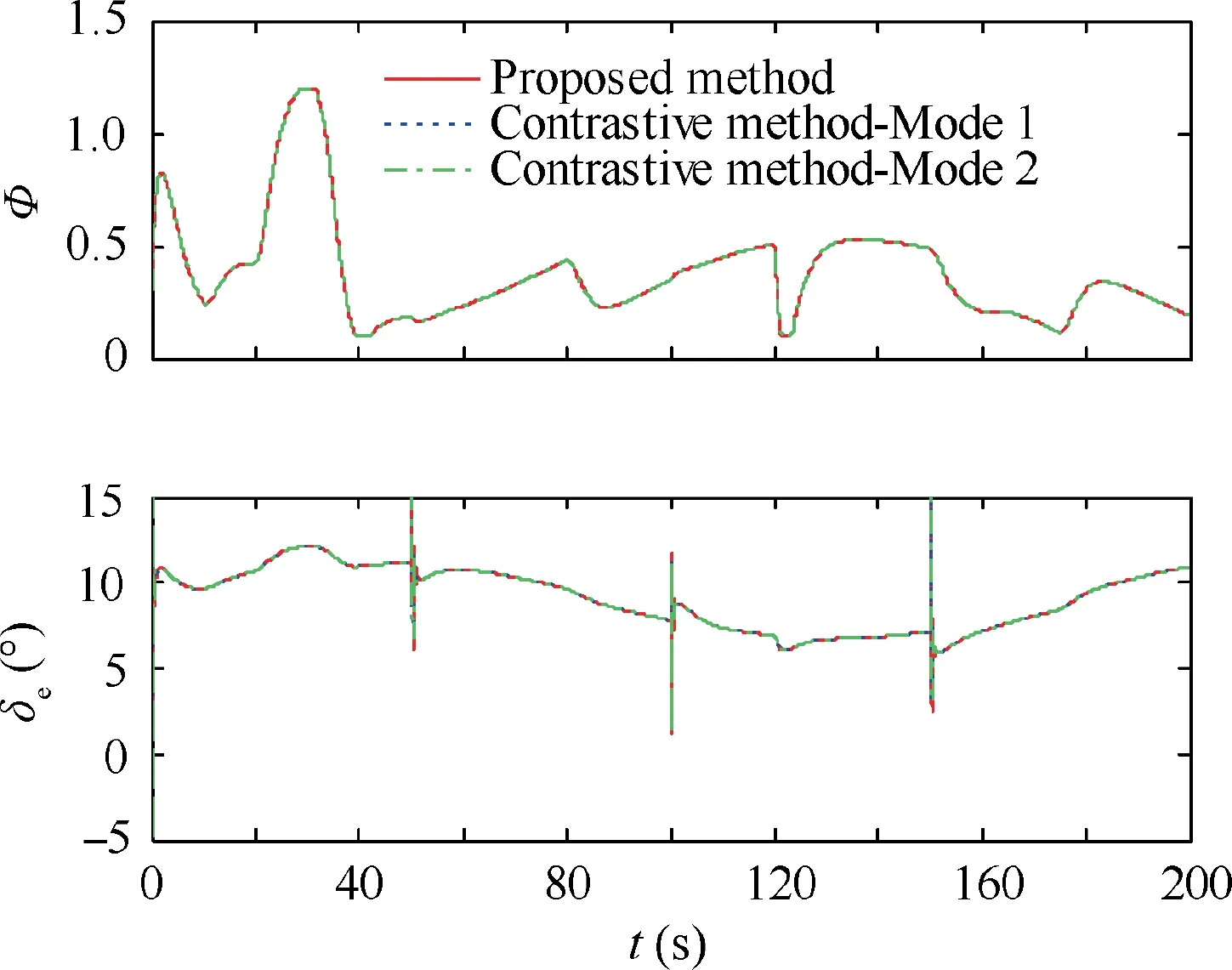
Fig. 5 Curves of control inputs.
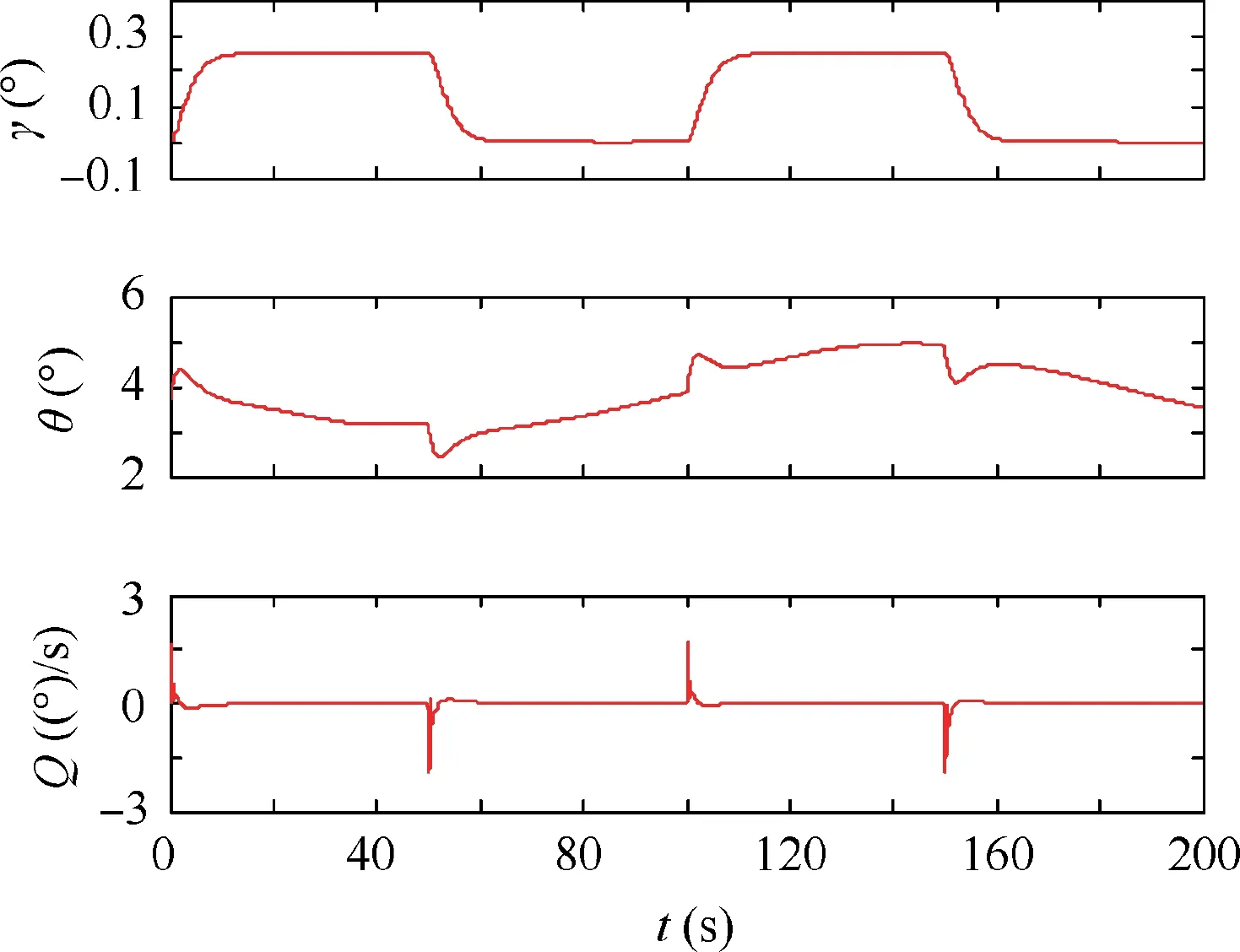
Fig. 6 Curves of other flight states under proposed method.
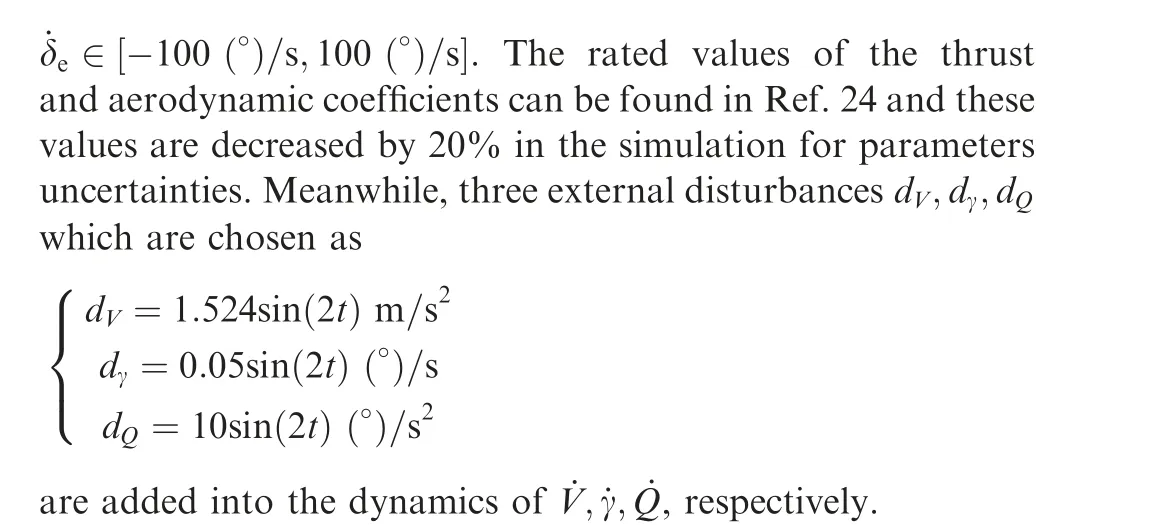
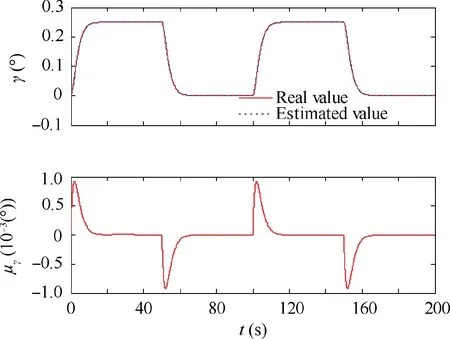
Fig. 7 Curves of flight path angle and estimated error μγ under proposed method.
In order to further show the advantage of the proposed control method, the existing backstepping-based and disturbance-observer-based control method employing measured flight path angle presented in Ref.18 is introduced as the contrastive method. The control parameters of the proposed and contrastive methods are shown in Table 2.
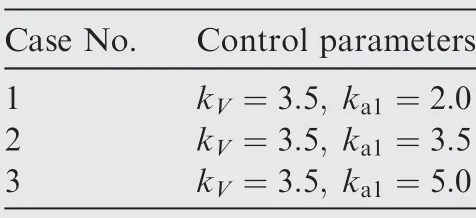
Table 3 Settings of ka1 andkV.
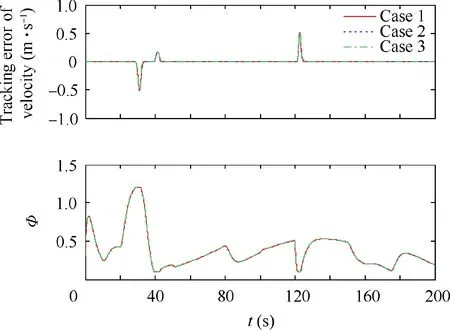
Fig.9 Tracking curves of velocity error and control inputs fuelto-air ratio.
For simulating the measured error of the flight path angle γ,we add a constant 0.005°to its actual value and use it as feedback. Meanwhile, for better verification, two cases that the measured error of the flight path angle exists and does not exist in the closed-loop system are considered when employing the contrastive method. The case in which the measured error of the flight path angle does not exist in the closed-loop system is labeled ‘‘Mode 1”and the other one is labeled ‘‘Mode 2”.The simulation results are illustrated in Figs. 3–8.zero, there also exists a difference caused by measured error between the actual flight path angle and γcmd.Due to the avoidance of the measured flight path angle, this practical problem does not influence the control performance of the proposed method. Fig. 6 illustrates the other flight states under the proposed method. It can be observed that the flight states are stable even though the saturation of control inputs occurs.Fig. 7 illustrates the curves of real and estimated flight path angles γ,^γ and the estimated error μγunder the proposed method.It can be observed that the estimated error μγis small.This means the proposed strategy for estimation of the flight path angle utilizing the robust high-order differentiator is effective. Moreover, compared to the altitude tracking error under the mode 2 illustrated in Fig. 4, it can be observed that the estimated error μγis convergent when the altitude is smooth but the measured error of the flight path angle always exists in the flight process. Fig. 8 illustrates the estimated values and errors of the three lumped disturbances under the proposed method. It can be observed that the proposed method acquires better effects on the estimations of the lumped disturbances. The estimated errors are adjustive when the flight states turn sharply and they are balanced when the flight states change smoothly. This is because the NDOs utilized the flight states to calculate their inner variables and they are sensitive to the flight states (see Table 3).
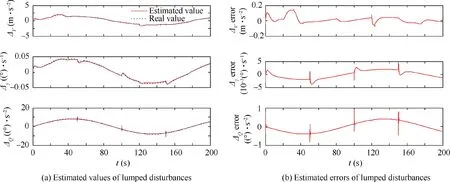
Fig. 8 Estimated values and errors of lumped disturbances under proposed method.
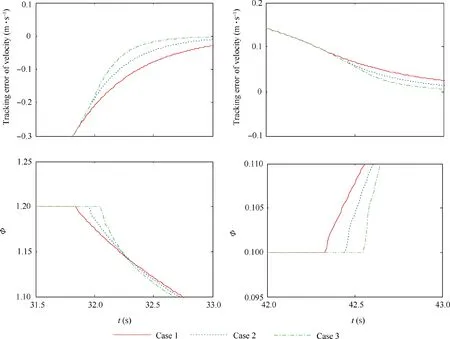
Fig. 10 Local images of tracking curves of velocity and control inputs fuel-to-air ratio.
Next, the effectiveness of the anti-saturation strategy is investigated. The theoretical analysis is given in Remark 2.The former experiment shows the result under ka1
The simulation result is illustrated as follows.
Fig.9 illustrates the tracking curves of velocity and control inputs fuel-to-air ratio and Fig. 10 illustrates their local images. It can be observed that Case 1 acquires shorter duration of saturation and Case 3 acquires superior tracking error. This result verifies the aforementioned explanation in Remark 2.
6. Conclusions
(1) A backstepping-based control method for the tracking control of HFVs is developed with the considerations of the inaccuracy of measured flight path angle,external disturbances and saturation of control inputs.
(2) An estimated flight path angle is designed based on a robust high-order differentiator and utilized to construct the control laws.Meanwhile,two auxiliary variables are introduced and added into the control laws for ensuring the stability of the closed-loop when the saturation of the control inputs occurs.
(3) An NDO based on tracking differentiator is established to tackle the lumped uncertainties in the dynamics of velocity and pitch rate including model parameters uncertainties and external disturbances, and a method based on the robust high-order differentiator is designed to estimate the lumped uncertainty in the dynamics of flight path angle avoiding the use of the measured flight path angle.
(4) The comparative simulation results show that the control performance of the proposed method is superior to the contrastive method when the measured error of flight path angle exists. Moreover, the proposed method can ensure the flight stability even though the parameters of the model are unknown and the saturation of the control inputs occurs. The proposed method is independent of the measuring accuracy of the flight path angle, which makes the proposed method more adaptive to engineering application.
(5) Besides the imprecise measurement of flight path angle,sensor noise is also a common and practical factor influencing the performance of flight controller. This is the next phase of our work.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgement
This study was supported by the National Natural Science Foundation of China (No. 61803357).
 CHINESE JOURNAL OF AERONAUTICS2021年2期
CHINESE JOURNAL OF AERONAUTICS2021年2期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Recent active thermal management technologies for the development of energy-optimized aerospace vehicles in China
- Electrochemical machining of complex components of aero-engines: Developments, trends, and technological advances
- Recent progress of residual stress measurement methods: A review
- Micromanufacturing technologies of compact heat exchangers for hypersonic precooled airbreathing propulsion: A review
- Towards intelligent design optimization: Progress and challenge of design optimization theories and technologies for plastic forming
- A combined technique of Kalman filter, artificial neural network and fuzzy logic for gas turbines and signal fault isolation