脑卒中患者静态平衡的足底压力分析
2021-04-02 07:27林强郑煜欣廖婉晨罗志伟黎婉颖欧海宁梁俊杰
中国康复理论与实践 2021年3期
林强,郑煜欣,廖婉晨,罗志伟,黎婉颖,欧海宁,,4,梁俊杰,,3
1.广州医科大学附属第五医院,广东广州市 510700;2.广州医科大学,广东广州市 511436;3.广州医科大学康复实验室,广东广州市 510700;4.广州市加速康复腹部外科重点实验室,广东广州市510700
脑卒中后平衡障碍是影响功能恢复的主要因素之一[1],造成患者步行功能障碍、活动减少和社会参与减少[2-3],对患者日常生活独立程度及整体恢复有一定影响。平衡障碍影响站立、姿势控制和步行的安全进行,因此,准确、定量评估平衡功能,研究平衡障碍的类型、程度和机制,有利于预防跌倒事件发生,提高康复疗效。
现阶段国内外常用传统平衡功能评估手段为Berg平衡量表、Tinetti 评分、计时起立行走测试等;近年来,平衡训练系统、测力台、运动分析系统、足底压力分析等测试仪器已用于平衡评估[4-10]。足底压力分析能直观地评估平衡调控时双侧下肢运动学和动力学参数的变化[11-13],可用于多种临床疾病平衡功能评估[14-20],而国内足底压力研究主要以步行状态为主[21-23],对于静态平衡的研究暂未有相关报道。
本研究采用横断面研究方式,采集脑卒中患者的足底压力运动学和动力学数据,并计算对称性指数(symmetry index,SI)、对称性角度(symmetry angle,SA)和Romberg 商(Romberg quotient,RQ),分析视觉和下肢对称性对平衡功能的影响。
1 资料与方法
1.1 一般资料
招募2019年7月至12月于广州医科大学附属第五医院康复医学科住院的脑卒中患者,诊断标准符合全国第四次脑血管病学术会议制订的脑卒中诊断标准[24],经颅脑CT或MRI证实。
纳入标准:①脑卒中导致单侧下肢功能障碍,且不使用助行器下可站立1 min 以上;②Brunnstrom 分期Ⅲ~Ⅴ期;③简易精神状态检查(Mini-Mental State Examination,MMSE)≥10 分;④能配合完成试验;⑤自愿签署知情同意书。
排除标准:①严重失语;②病情不稳定;③并发严重心、肺、肝、肾等重要脏器疾病;④严重精神障碍疾病;⑤存在下肢疼痛、腰痛、下肢骨折既往史或糖尿病足等影响足底压力测试情况;⑥存在耳鸣或头晕症状,或并发前庭相关疾病。
剔除标准:①试验过程中无法耐受;②试验期间出现病情变化,影响试验结果;③试验数据采集不完成,未能有效分析。
最终招募脑卒中患者13 例,其中1 名部分数据缺失,予剔除,最终有效受试者12 例,其中脑出血4例,脑梗死8 例,均为幕上病变。同时招募正常年轻人30例为对照组,优势侧均为右侧。两组年龄、体质量和体质量指数均有显著性差异(P<0.001)。见表1。
本研究已通过广州医科大学附属第五医院伦理委员会审查(No.KY01-2019-06-20)。所有受试者自愿加入研究并签署知情同意书。
1.2 足底压力分析
1.2.1 测试前准备
房间准备:实验室安静,光线明亮,足底压力分析测试板放置于距离空白墙壁约1.5 m 处,墙上外置“+”标示物。
设备准备:实验设备为FreeMed 足底压力分析测试板(SensorMedica,意大利),传感面积为1600×400 mm,传感器密度为4/cm2,传感器数量为25 600 个。足底压力分析测试板中央粘贴站立足印标识,引导受试者站立于相同位置。
受试者准备:测试时赤脚,完全暴露踝关节;嘱受试者在测力台上适当活动,以适应测力台硬度并减缓紧张情绪。
1.2.2 测试
受试者站立于测力台中央标示位置,双脚平放,双手自然垂于身体两侧。待受试者站稳后,测试者按前、后、左、右4 个方向摆动受试者骨盆,使受试者双脚压力均匀分布。
采集睁眼状态足底压力数据:调整红色“+”标示物位置,与受试者眼睛持平,指示受试者目视正前方1.5 m 处“+”,待受试者正常自然站稳后,开始记录足底压力数据10 s;
采集闭眼状态足底压力数据:指示受试者闭眼,经过5 s左右稳定期后,开始记录足底压力数据10 s。
试验全程由一名治疗师在背后防护,避免跌倒事件发生。
1.2.3 足底压力数据处理
使用系统自带Freestep 软件对采集的数据进行处理,生成运动学参数、RQ、足底压力参数(动力学参数SI 和SA)和足底压力中心(center of pressure,CoP)[18,25-28]。
1.2.3.1 运动学参数
运动学参数包括球长度、椭圆面积、平均速度、平均X、平均Y、椭圆倾斜角、椭圆偏心角、最大摆动和最小摆动。平均X 和平均Y 分别代表左-右和前-后方向的运动轨迹。
1.2.3.2 RQ
X为运动学参数中球长度和椭圆面积[29-31]。
1.2.3.3 足底压力参数
足底压力参数包括动力学参数SI和SA[25,29]。动力学参数包括左右双侧下肢的最大压强、平均压强、面积、前足面积、后足面积、负荷、整体负荷、前足负荷和后足负荷。

Ⅴ为运动学和动力学参数。SI 接近0 时代表双侧肢体完全对称。
SA接近0时代表双侧肢体完全对称。
以上两个公式中,V1在对照组中为非优势侧,在脑卒中组为患侧;V2在对照组中为优势侧,在脑卒中组为健侧。
1.2.3.4 CoP
根据平均X和平均Y进一步定位CoP[32]。
1.3 统计学分析
采用SPSS 22.0 进行统计分析,Graphpad 绘制数据结果图。计量资料以(±s)表示,进行正态性检验,符合正态分布采用配对t检验,偏态分布采用Wilcoxon 秩和检验。组内比较以配对t检验或两相关样本Wilcoxon 秩和检验;组间比较采用两独立样本t检验或Wilcoxon秩和检验。显著性水平α=0.05。

表1 两组一般资料比较
2 结果
2.1 运动学参数
与睁眼状态比较,闭眼状态下,对照组平均Y 明显变大(P<0.01),最大摆动明显增加(P<0.01);脑卒中组球长度明显增加(P<0.01),平均速度增快(P<0.05),最大摆动增大(P<0.05)。见表2。
与对照组比较,脑卒中组在睁、闭眼两种状态时均表现为椭圆面积显著增大(P<0.001),平均X 增大(P<0.05),而在闭眼状态时最大摆动明显增大(P<0.01)。见表2。
2.2 RQ
脑卒中组球长度RQ 明显大于对照组(P<0.01)。见表2。
2.3 足底压力参数
两组在睁眼和闭眼两种状态下所有参数SI比较均无显著性差异(P>0.05)。与对照组比较,脑卒中组在两种状态时均表现为负荷SI、整体负荷SI、前足负荷SI、面积SI和前足面积SI负值增加(P<0.05)。见表3。
两组在睁眼和闭眼两种状态下所有参数SA 比较均无显著性差异(P>0.05)。与对照组比较,脑卒中组在两种状态时均表现为负荷SA、整体负荷SA、前足负荷SA、面积SA、前足面积SA 增大(P<0.05),后足负荷SA 仅在睁眼时增大,后足面积SA 仅在闭眼时增大(P<0.05)。见表4。
2.4 CoP分布散点图
对照组在睁、闭眼两种状态下CoP 主要分布在Y轴的负值方向,而脑卒中组CoP 相对离散分布,在X轴上分布较对照组明显。见图1。
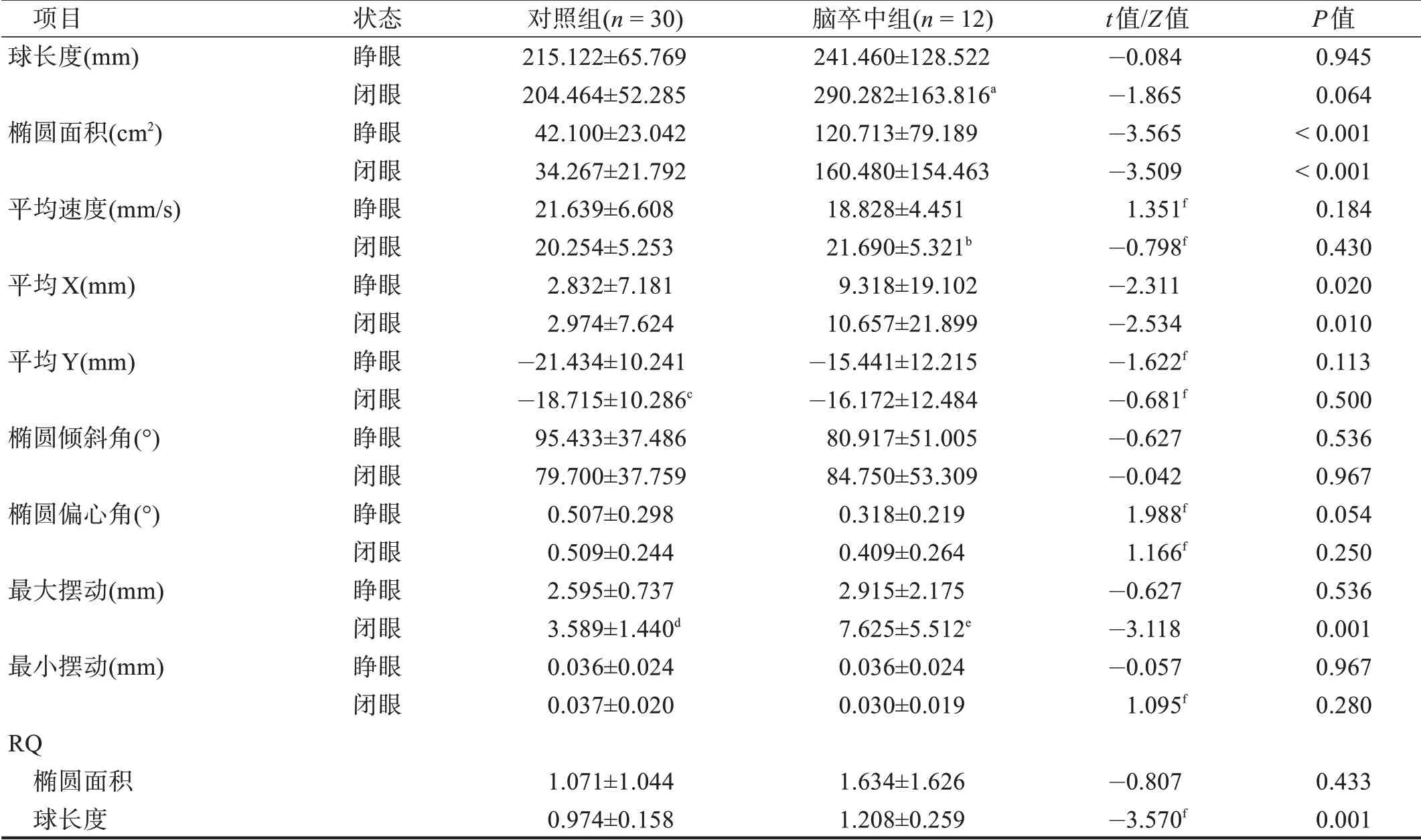
表2 两组运动学参数比较
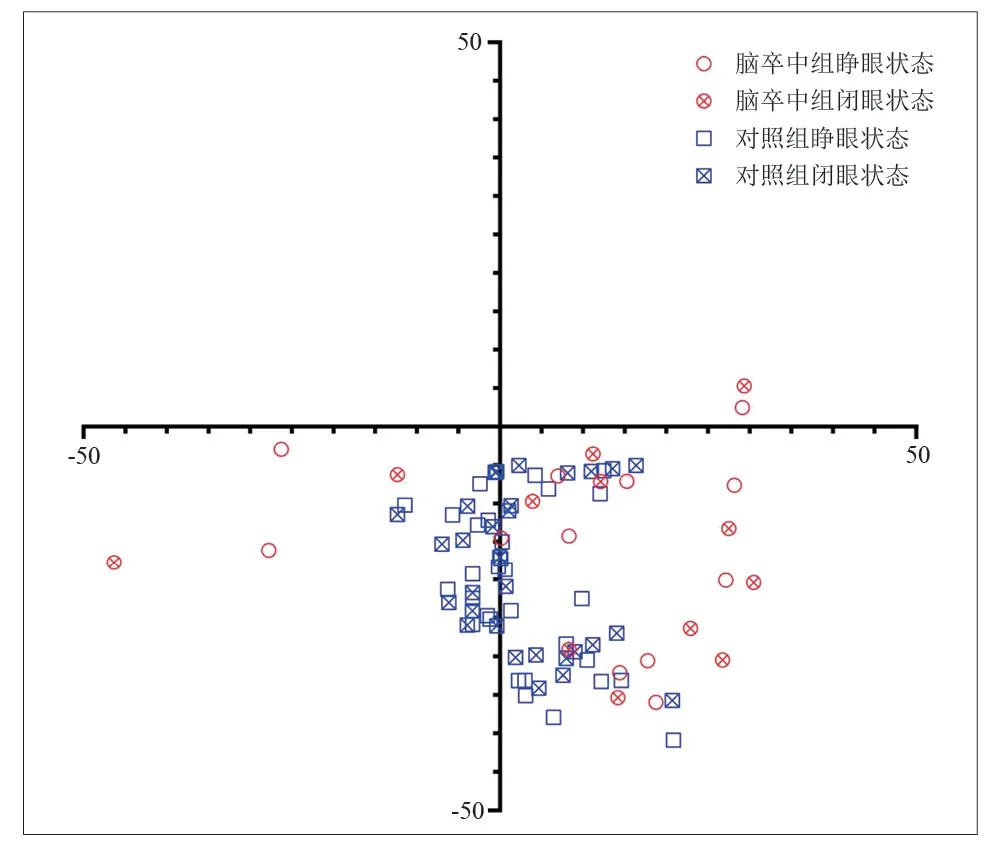
图1 CoP分布散点图
3 讨论
平衡控制主要取决于视觉、前庭觉和本体感觉。视觉输入、足底本体感觉输入和下肢运动对平衡调控起关键作用[34]。已有大量研究证明下肢力量减少与平衡障碍和跌倒风险相关[18,35]。姿势控制和视觉刺激也是跌倒事件的重要影响因子[4]。
在睁、闭眼试验范式下,模拟视觉剥夺,发现正常人摆动幅度增大,而脑卒中患者除了摆动幅度增大外,摆动的速度和摆动范围也明显增大,说明正常人和脑卒中患者平衡调控需要视觉参与;对比正常人,脑卒中患者在睁、闭眼两种状态下椭圆面积变大,X轴活动(左-右)增加,说明视觉剥夺对中枢神经受损引起的平衡障碍影响更明显。Rahimzadeh Khiabani 等[14]对脑卒中患者进行睁、闭眼下站立足底压力分析,发现视觉剥夺时CoP 的摆动范围和摆动速度均显著增大,说明中枢受损引起的平衡功能障碍在闭眼状态下平衡控制更差,也提示视觉系统在脑卒中患者的平衡控制中起重要作用,与本研究结果基本一致。Giagazoglou 等[35]对正常人和盲人睁、闭眼站立进行足底压力分析,发现盲人在X 轴和Y 轴上的平衡控制能力都较正常人差,而正常人在视觉剥夺状态下CoP 摆动明显增加,说明视力是姿势控制的关键因素,可能比下肢力量更重要。
RQ 是与视觉依赖性相关的指数,RQ 与姿势控制的视觉依赖呈正相关[18,26]。在闭眼状态时摆动幅度增大,脑卒中患者的椭圆面积RQ 也比正常人高,提示受损的神经中枢对于视觉依赖可能更明显。Kalron[26]采集多发性硬化后平衡障碍患者的睁、闭眼足底压力分析并调查他们的跌倒事件,发现椭圆面积RQ 高的患者出现跌倒事件更多,表明椭圆面积RQ 可以作为跌倒事件发生的预测因子。对于RQ 异常患者需加强日常生活期间防跌倒宣教、环境改造和应对措施。
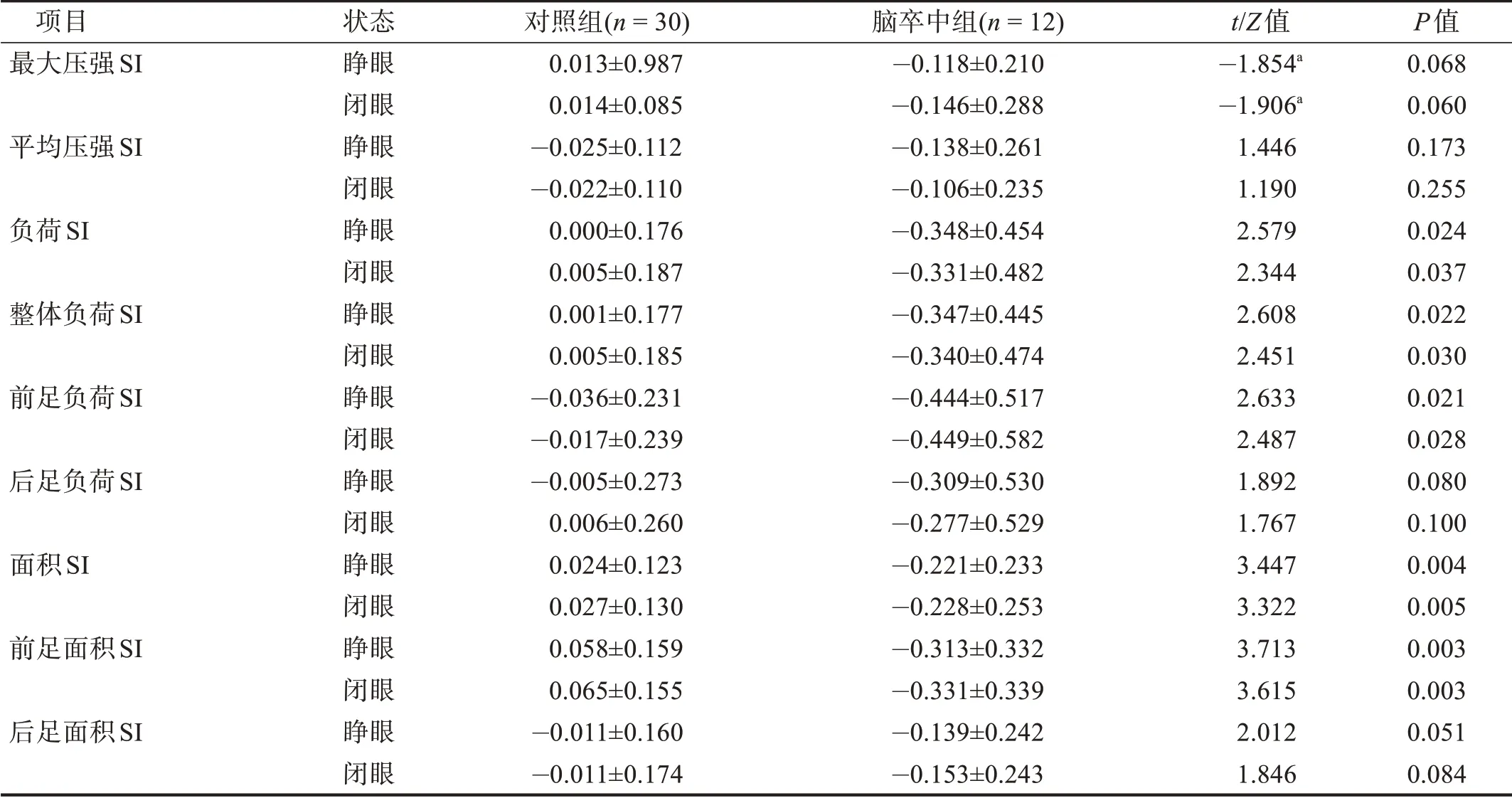
表3 两组足底压力参数SI比较
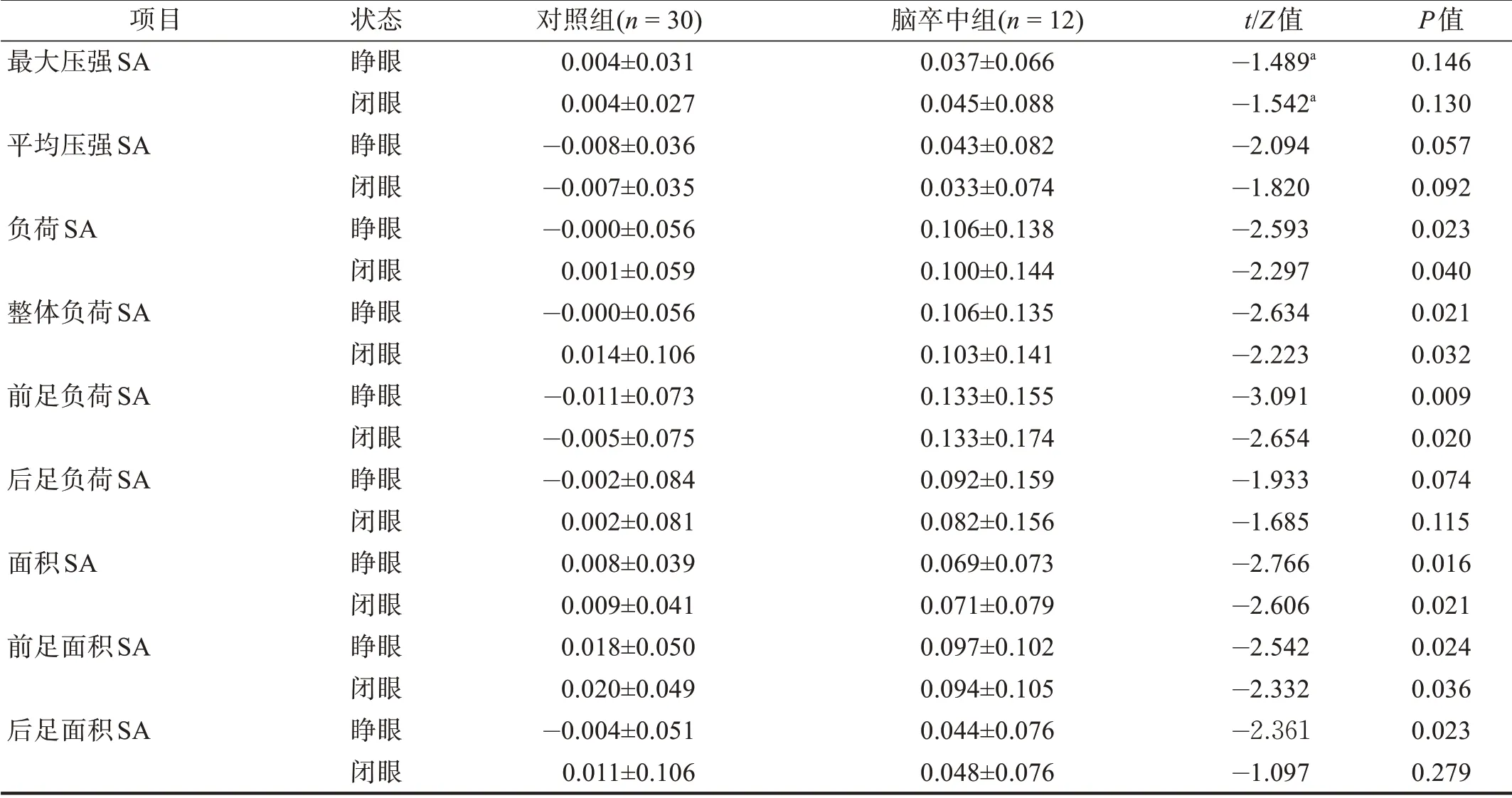
表4 两组足底压力参数SA比较
本研究中采用的动力学参数主要为足底负荷和足底接触面积,由于研究所纳入的脑卒中患者均为单侧偏瘫,使用SI、SA 公式处理原始数据,消除个体化差异同时把健侧和患侧下肢数据合并为对称性系数SI和SA。本研究中发现,睁眼和闭眼两种状态之间足底压力动力学参数的SI 和SA 均无差异,说明视觉剥夺对于双侧足底的负荷和面积没有明显影响,并非通过调整足底负重或接触面积而调控平衡。原因可能为:①在正常人和脑卒中患者的睁、闭眼站立平衡评估中,足底压力分析的动力学参数不如运动学参数敏感;②脑卒中患者样本量较小。
本研究显示,两组被试在睁、闭眼两种状态下站立的SI 和SA 均未有差异,表明视觉剥夺并不改变双下肢偏侧化状态;而组间比较时,脑卒中患者的SI、SA 呈现明显偏侧化,主要体现在负荷和面积分布相关参数,由于入组患者均为单侧偏瘫,研究结果与脑卒中后单侧偏瘫表现吻合,说明足底压力分析可通过SI、SA的计算准确评估脑卒中患者站立状态时下肢的对称性,负荷和面积参数对于脑卒中后偏瘫化临床表现敏感。根据本研究结果所述,视觉剥夺对于平衡维持的运动学指标敏感,但对于SI、SA 不敏感,说明脑卒中患者并非通过调控双侧下肢负重或足底接触面积达到调整平衡功能的目的。结合散点图结果,提示脑卒中患者CoP 在X 轴分布较正常人明显,说明脑卒中患者在站立位时以一侧负重为主,可应用于临床中采用重心转移相关训练的依据和评估。Portnoy等[36]发现,CoP 在X 轴(左-右)的运动轨迹比Y 轴(前-后)能更好预测跌倒事件,且研究结果表明压力分析可应用于临床平衡评估。
综上所述,脑卒中偏瘫患者平衡控制对视觉有一定依赖性;CoP、足底负荷和面积参数对于脑卒中后偏瘫化评估敏感;足底压力分析系统可对脑卒中患者的平衡功能进行有效、客观评估,且简单易行,易于推广。下一步可进行加强视觉反馈对平衡功能的纵向研究。
利益冲突声明:所有作者声明不存在利益冲突。
猜你喜欢
中国心血管杂志(2022年2期)2022-11-25
中国心血管杂志(2022年4期)2022-11-25
小学生学习指导(高年级)(2022年5期)2022-06-02
数学小灵通·3-4年级(2021年5期)2022-01-01
中学生数理化·中考版(2021年8期)2021-07-31
中国心血管杂志(2021年6期)2021-01-02
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
中国心血管杂志(2019年3期)2019-01-04
制造技术与机床(2018年11期)2018-11-23