
一种果蔬采摘柔性末端夹持器的设计与制作
2021-04-01 03:19:14
河南农业 2021年3期
目前,机器人技术已经在工业、医疗、军事、科学勘探等方面得到了广泛的应用,随着农业机械化、自动化的深入发展,机器人技术在农业生产方面发展迅速。其中,采用柔性材料制造的软体机器手在农作物采摘方面有着独特的优势,较强的灵活性使其适应农作物枝叶错综复杂的环境;良好的柔韧性使其能够摘取不同形状的果实,通用性比较广;高效的过载保护能力使其避免载荷过大时损害果实。
本设计选取多腔室应变的方式设计制作了一种果蔬采摘柔性末端夹持器。夹持器由应变抑制层和充气应变腔室部分组成,采用超弹性硅橡胶材料制作,选用空气为传动介质,基于帕斯卡原理,通过控制腔体内的气压来控制夹持器的伸长与弯曲,完成果蔬的采摘。
一、结构设计与运动原理
果蔬采摘柔性末端夹持器采用多腔室应变结构,由底层的应变抑制层和充气应变腔室部分组成,其结构示意图如图1,在充气应变腔室通入气压后,由超弹性材料构成的腔室发生膨胀,沿长度方向互相远离,底层的应变抑制层限制了其在底层的膨胀变形,使柔性末端夹持器向应变抑制层弯曲,采用3 个圆周分布的夹持器配合使用,通过改变气压大小和腔室尺寸分布来控制“三爪机械手”的弯曲程度和夹取能力,完成果蔬的抓取。
在尺寸设计时,沿长度方向的壁厚L1相对于其他方向的壁厚稍小,其目的是使夹持器充气膨胀以后主要沿长度方向膨胀,在底层的应变抑制层的作用下实现最大程度的弯曲效果,防止其他方向的膨胀,提高工作效率。
二、果蔬采摘柔性末端夹持器的制备
本设计的材料采用Ecoflex-0050硅橡胶浇注而成,此类硅胶应变性能好,具有很好的弹性以及伸长率。模具采用SolidWorks 三维设计软件进行建模,导入3D打印软件中进行切片处理,采用3D 打印机打印出充气应变腔室部分的上下模如图2。分型面的选择要便于脱模和模具的制造,下模结构尺寸与夹持器的内部轮廓一致,上模结构尺寸与夹持器的外部结构尺寸一致,上下模组合使用浇铸出腔室结构。

图2 模具设计图
由于硅胶材料有一定黏度,在搅拌混合时会混入气泡,影响软体夹持器的力学性能,故混合后的硅胶浇注到模具中,需要放入真空箱中进行除泡处理,静置使其凝固成型。取出充气应变腔室部分和应变抑制部分,对应摆放后采用硅胶黏接剂进行黏合,将3 个夹持器沿圆周分布装配为三爪结构完成制作。
三、动力传输系统的设计
气压驱动是软体机器人领域应用比较广阔的驱动方式,根据本设计在果蔬采摘方面应用的特点,选用气压传动方式,无环境污染,可针对不同的工作状况实现无级调速,相对于液压传动气压传动的流体黏度很小,流动时阻力损失小。图3 为气压传动回路图。该气动回路的能源装置为气泵,搭配储气罐使用;执行元件是果蔬采摘柔性末端夹持器;控制元件有精密调压阀、二位三通电磁换向阀;辅助元件包括普通压力表和精密压力表。
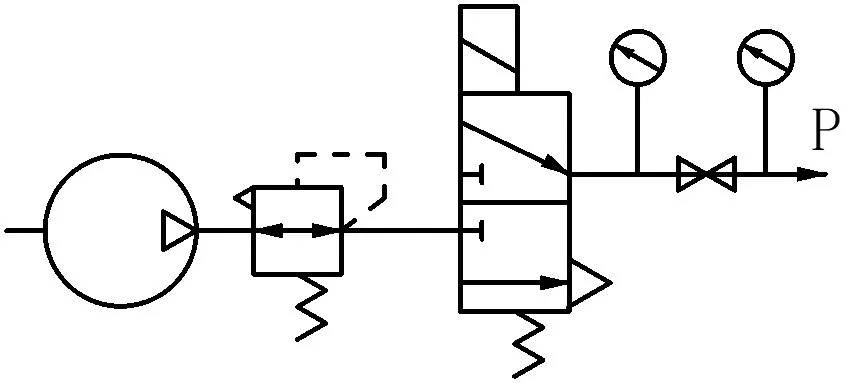
图3 气压传动回路图
将装配完成的软体机械手与气压传动回路连接,工作时由气泵输出压缩空气,通过调节调压阀以调节气压至适当范围,通过二位三通电磁换向阀控制气动回路的通断。当电磁阀打开时,换向阀位于接通位置,当电磁阀关闭时,换向阀处于断开位置。换向阀后的普通压力表测定通入的气压,当普通压力表读数小于精密压力表的量程时,才能保证精密压力表的安全使用,此时可打开阀门,通入气压进行抓取,精密压力表所测得的读数即为摘取果实时的工作压力。
四、总结
该设计在模仿人手结构和特点的基础上,以目前仿生机械手的研究进展为依托,结合三维建模软件、3D 打印技术和气压传动知识,设计出针对果蔬采摘的末端夹持器。随着各种超弹性材料的发展、先进的有限元分析及设计仿真软件的应用以及农业生产现代化的推进,农业软体机器人的设计研发更加方便,这将会是软体机器人在农业生产方面迅速发展的一个契机。
猜你喜欢
军事文摘(2024年4期)2024-01-09 09:07:58
能源化工(2022年1期)2023-01-14 05:59:21
上海交通大学学报(2021年2期)2021-03-02 10:17:22
装备制造技术(2020年9期)2021-01-26 00:15:14
石油机械(2021年1期)2021-01-13 08:52:08
军事文摘(2020年24期)2020-11-29 06:35:54
中国特种设备安全(2019年4期)2019-05-20 09:56:18
传感器世界(2019年3期)2019-02-17 13:07:26
时代农机(2016年6期)2016-12-01 04:07:17
时代农机(2015年3期)2015-11-14 01:15:22
