润湿性表面液滴导向运动的研究进展
2021-02-03 08:59卢志成郑佳宜余延顺
表面技术 2021年1期
卢志成,郑佳宜,余延顺
(南京理工大学 能源与动力工程学院 电子设备热控制工业和 信息化部重点实验室,南京 210094)
液滴与固体表面之间的界面作用形式多种多样,有碰撞、反弹、润湿等[1-2]。其中,液滴因界面特性、自重力或其他外力作用的引导,而沿着某一方向的运动被称为“导向运动”。这种现象在自然界十分普遍,如沙漠甲虫通过背部疏/亲水表面捕水输水[3-4]、猪笼草的多尺度结构表面连续导向运输所需的水滴[5-7]、仙人掌茎上的雾收集系统[8-10]等。在没有外部能量输入下,大多数液滴的导向运动都是依靠固体表面的特性。因此,理解固体表面的特性对于实现液滴的导向运动是非常关键的。
润湿性是固液接触界面的一个重要特性。它是固体表面从固-气接触界面向固-液接触界面转移的一种现象,是液滴可以在固体界面上铺展的能力[11]。表面润湿性可用界面接触角表征,如图1 所示。液滴与润湿性表面接触角>150°,同时滚动角<10°,该表面即为超疏水表面;接触角在90°~150°之间,即为疏水表面;接触角<90°,即为亲水表面。超疏水表面由于其优良的防水防污[12]、耐腐蚀[13]、抗结冰[14]、强化冷凝传热[15-16]等性能受到人们的青睐。微纳米粗糙结构和低表面能的构造是超疏水表面制备的关键。随着化工技术和微纳米技术的发展,研究热点正从单一的均匀润湿性表面向非均匀的特殊润湿表面转移。最新研究表明,非均匀润湿表面对液滴存在“力矩”[17],它能改变液滴的运动轨迹即存在导向作用,而该特征与很多实际应用相关。例如化学合成反应中,不同种类流体会由于导向作用自发移动合并[6];在淡水收集领域,运用表面的润湿性差异对液滴自发导向作用的物理性质,为进一步提高淡水收集运输效率提供了新思路[3-10];在传热领域,换热装置的铝、铜和不锈钢具有天然亲水性,这种亲水性使这些材料难以有效排水,导致冷凝水滞留量增加。因此,在传热和空气处理表面上的水滴管理和控制,对于系统的整体能效、功能维护有着至关重要的作用[18]。这些实际应用涉及的液滴运输技术近年来取得了迅速的发展,尤其对于润湿性表面上的液滴运输技术。因此,有必要对润湿性表面上液滴导向运动的研究进行综述,归纳不同润湿性表面涉及的不同驱动力对液滴导向运动的影响,从而便于对该过程中的力学机制展开更深入的研究。
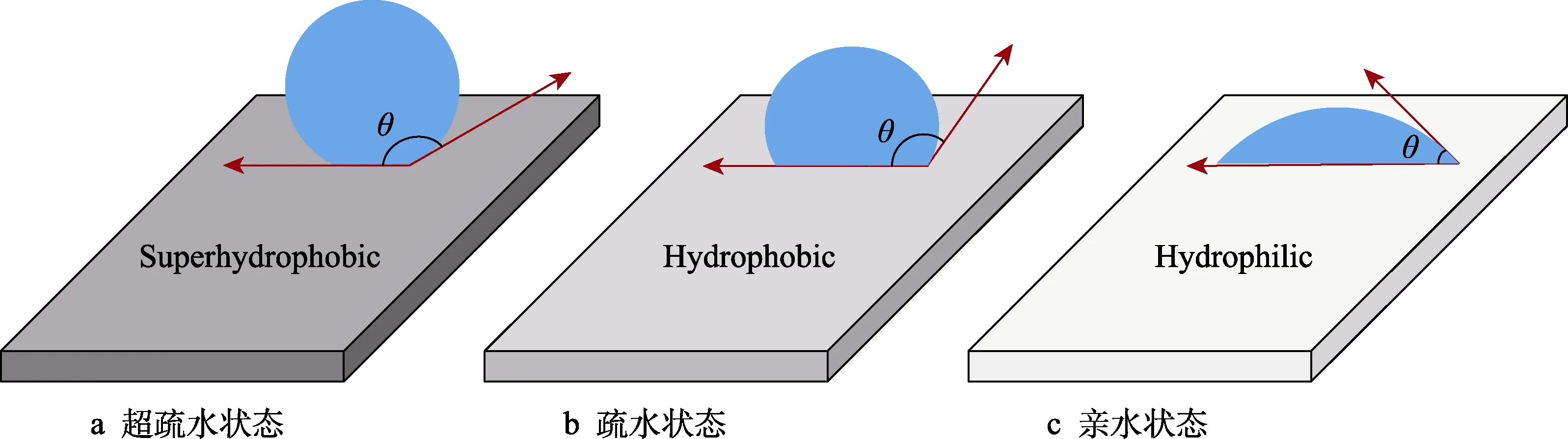
图1 具有不同接触角的表面状态 Fig.1 Surface state with different contact angles: (a) superhydrophobic state, (b) hydrophobic state, (c) hydrophilic state
本文首先介绍关于液固接触和液滴运动的基本理论,然后按不同的液滴运输技术进行了系统综述,最后对各种液滴运输技术以及未来的研究和应用方向进行了总结与展望,提出了对润湿性表面上液滴做曲线运动过程中深入到离心力、表面张力等力学特性的研究和耦合多外场结合固体润湿性表面的优化设计,来控制多液滴实现精准导向运输的方向。
1 基本理论
1.1 液固接触
润湿性和润湿过程与表面形态密切相关,液滴的形状取决于固-液-气三相界面[11]。如图2a—c 所示,液滴在固体表面上的润湿行为可分别用Young 模型[19]、Wenzel 模型[20]、Cassie 模型[21]来描述。平衡接触角用Young 方程描述为:

式中:θY是Young 模型的平衡接触角,γsg、γsl、γlg分别是固-气、固-液、液-气界面张力。但是,Young模型里的固体表面是理想状态下的均匀、光滑、无限平坦的刚性固体表面。
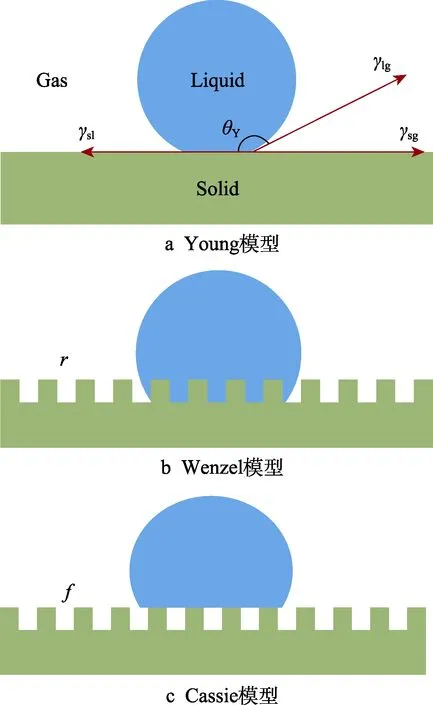
图2 液滴在不同固体表面的润湿状态 Fig.2 Wetting state of droplets on different solid surfaces: (a) Young model; (b) Wenzel model; (c) Cassie model
在表面粗糙的情况下,Wenzel 模型和Cassie 模型的接触角可分别用式(2)和式(3)表示。

式中:θw为Wenzel 表观接触角,r为粗糙表面的实际面积与表观几何面积之比,θc为Cassie 表观接触角,f为单位面积内固-液界面接触面积与实际表面积之比。
1.2 液滴运动
基于方程(1)—(3),粗糙度可以增加表面的疏水性或亲水性。因此,通过改变接触界面的粗糙度,可以制备出表面无化学成分差异的非均匀润湿表面。它对液滴可产生界面不平衡力,一旦液滴前后所受界面力不能平衡,液滴就会向特定的方向运动,即进行导向运动,如图3a、b 所示。该界面不平衡力即润湿梯度驱动力可结合式(1)推导得出[22],可用式(4)表示。

式中:R是液滴与界面接触的基半径,θA和θB分别表示液滴在润湿梯度前后两侧的接触角,φ表示图3b 中显示的极角。
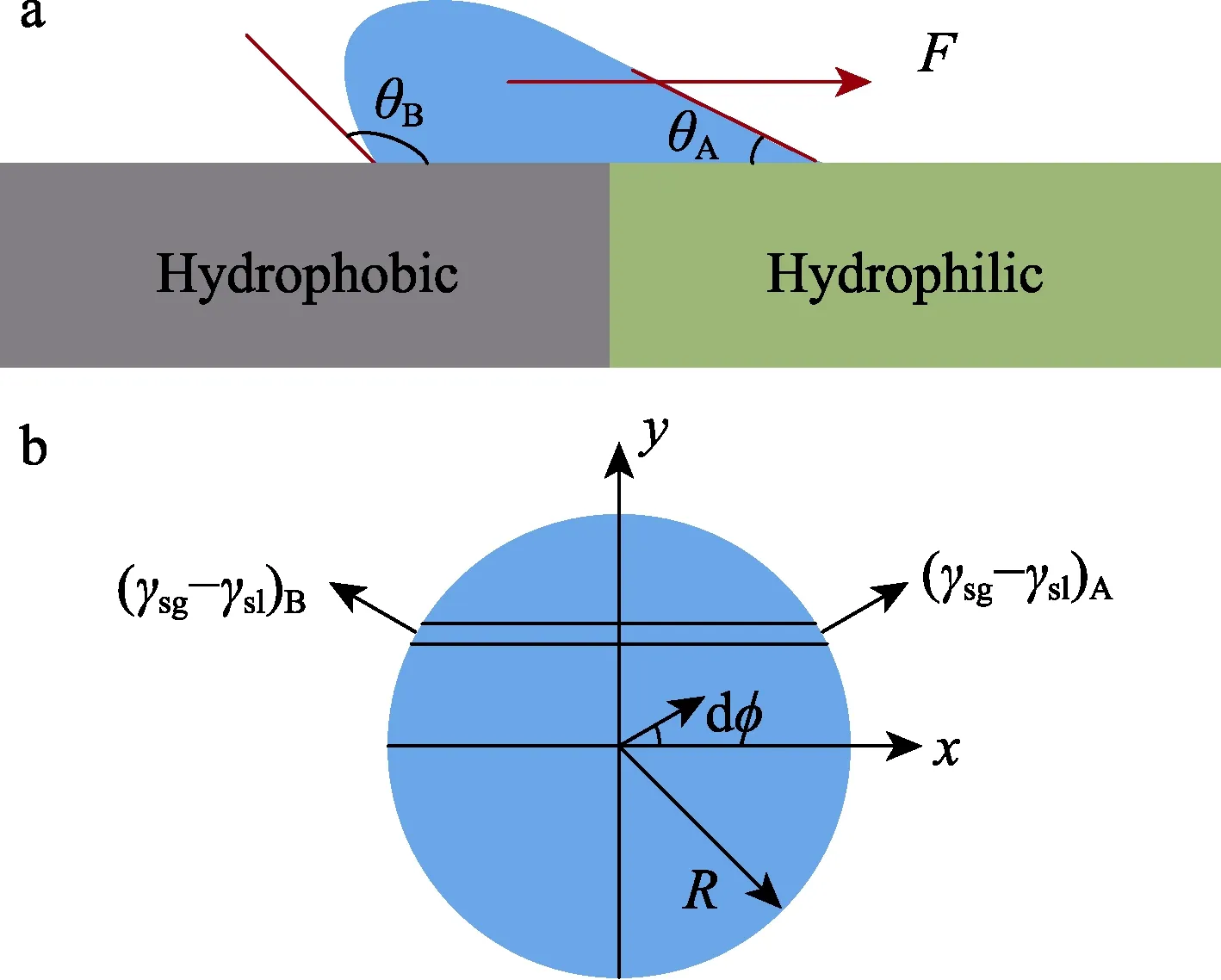
图3 液滴所受驱动力 Fig.3 Driving force on droplet
在大多数情况下,由于表面的不均匀性,低黏度液滴的运动会受到阻力的影响。由接触角滞后(液滴前进接触角和后退接触角之差)引起的阻力[23]可表示为:

式中:θadv和θres分别表示液滴的动态前进接触角和后退接触角。因此,较小的接触角滞后更有利于液滴的导向运动。
针对非均匀润湿表面上液滴运动阻力的确定,部分学者有不同的观点。根据局部滑移流体动力边界条件,阻力还可以写为[24]:

式中:λ为摩擦系数,A为润湿表面上液滴的总接触面积,v为液体的运动速度。λ与液体的黏度密切相关,传统定义为覆盖整个固体表面的区域。对于非均匀润湿表面,液滴与固体表面相互作用的摩擦系数依赖于表面不一样的润湿性,从而会对液滴产生不同的阻力效应。
利用上述基本理论,可以从力学角度理解许多关于液滴导向运动的现象。从理论角度深入理解这些现象,将有助于学者把研究成果应用于实际的工业领域。
2 润湿梯度表面驱动的导向运动
2.1 理论探索与数值研究
水滴在润湿梯度表面上会自发地向更易润湿(更亲水)的区域运动。此液滴运动机制最早由Greenspan[25]和Brochard[26]提出,并通过各自的假设条件和简化模型,得出润湿梯度表面上液滴运动的速度。事实上,预测液滴在润湿梯度表面上的运动速度是该领域理论探索的重要内容。早期的探索一般基于润滑理论结合固液接触线和接触角来分析液滴运动,后来理论研究逐渐侧重到宏观的力学特性,如Subramanian[22]基于楔形液滴形状和润滑理论的两种近似方法,获得液滴在润湿梯度表面运动的驱动力和阻力,由此推导得到液滴的准稳态速度。润湿梯度驱动力归根结底源于表面能与动能的转化,因此也可从能量角度研究液滴运动的力学特性。Liu[24]建立的统一理论力学模型中,驱动力正是由表面能公式和Young 方程推导得出。除此之外,Liu 还采用分子动力学模拟分析水滴的运动速度和轨迹,验证建立的力学模型。
近年来,随着计算机技术的发展和商业数值模拟软件的日趋成熟,液滴在润湿梯度表面上导向运动的数值研究逐渐兴起。由于其高效率、低成本,且能获得直观细致、准确有效的结果,能有效补充理论与实验研究,所以越来越获得学者认可。润湿梯度表面上的液滴运动涉及流体流动方面的两相流问题,即空气-水的气液两相流。除上述分子动力学方法[24,34],常见的解决两相流问题的数值方法还有Lattice Boltzmann(LBM)[27,29-30,33]、流体体积(VOF)[32]、水平集(Level- set)[31]、相场[28,34]等。它们在处理物理模型、两相界面追踪和求解计算等方面各有利弊。这些方法都已被学者用于解决润湿梯度表面上液滴运动的问题,而且已经获得了不少成果[27-34]。他们的研究热点集中于液滴尺寸[30,34]、液滴组分[28]、液滴初始位置[27]、液滴黏性[29,32]、表面润湿梯度[24,27-34]、表面接触角滞后[29]、表面取向[33]等,相关国内外研究进展列于表1 中。
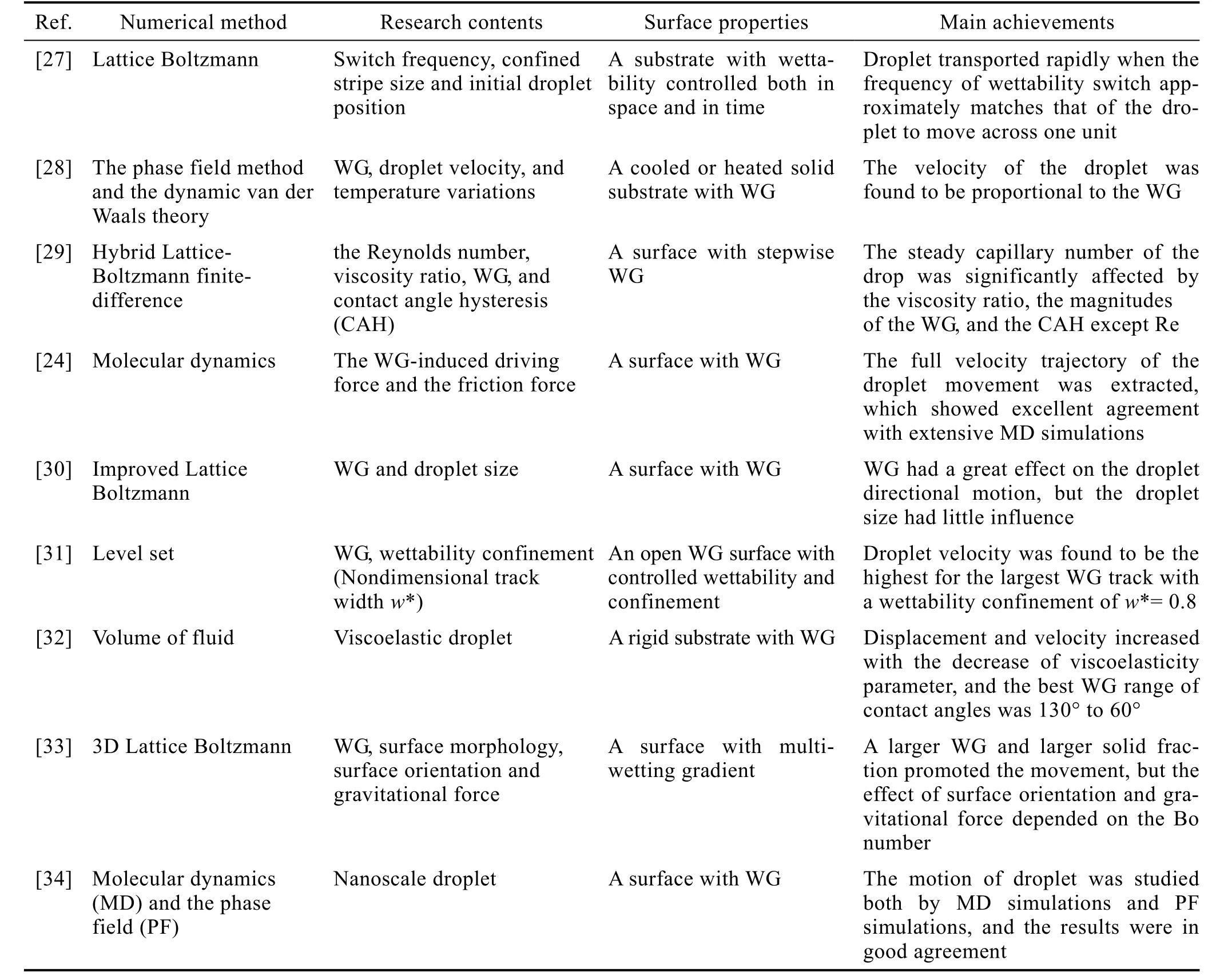
表1 润湿梯度表面液滴运动的数值研究进展 Tab.1 Numerical research progress of droplet movement on surface with wettability gradient (WG)
从表1 可以明显看出,LBM 方法最常被学者用于分析润湿梯度表面的液滴运动。另外,综合表1 来看,对固体表面而言,较大的表面润湿梯度、较小的接触角滞后,更有利于液滴的导向运输;对液滴而言,较小的液滴黏性和较大的液滴弹性,更容易使自身在固体表面上快速运动。因此,发展润湿梯度表面驱动液滴导向运输技术的关键在于高梯度、低接触角滞后固体表面的制备,这也对相关领域研究人员提出了更高的要求。事实上,就润湿梯度表面的制备和在该表面上的液滴运输实验来讲,学者已经进行了很多探究,并取得了一些进展[35-42]。
2.2 表面制备及液滴运输实验研究
如前所述,微纳米粗糙结构以及低表面能的构造是超疏水表面制备的关键,其实不仅仅是超疏水表面,润湿梯度表面的制备也依赖于表面粗糙度和表面能。表面粗糙度涉及固体物性和微尺度结构特性。先前,Wenzel[20]和Cassie[21]对粗糙度改变液滴表面接触角进行了基本理论的探究。在本身具有高表面能性质的材料表面修饰低表面能物质能显著提高疏水性。大多润湿梯度表面的制备方法都是结合表面粗糙度和表面能构造出非均匀润湿性的表面,如Malouin 等[43]通过改变基底表面硅微柱阵列的孔隙度来改变表面粗糙度,然后在微柱阵列表面涂覆一层薄的氟化钝化层,就得到具有非均匀润湿性的表面。这些表面微纳米结构的构造和表面改性的方法,包括化学气相沉积 法[35-37,42]、离子刻蚀法[40-41]、激光刻蚀法[40-41]、电化学法[38-39]等。
对于制备出的表面上的液滴导向运输实验,最早由Chaudhury 等[35]首次在润湿梯度表面上实验观察到液滴运输现象。在液滴运输过程中,速度、位移[35-37,39-41]等参数的获得是分析液滴动态行为的基础,综合已有的实验速度测量值[35-37,40],液滴在润湿梯度表面上的导向运输速度大概为几十毫米每秒。这些宏观参数对深入研究润湿梯度表面上液滴运动的力学特性(如驱动力、阻力)有重要参考意义,同时可以验证数值研究中得到的关于力学特性的结论。跟数值模拟的研究内容相似,表面粗糙度和表面能构造的润湿梯度值[35-42]也是实验研究的重点,其他如液滴尺寸[37]、液滴与表面黏性[35,41-42]、表面倾角[35,37]等相继被学者的研究涉及。表2 即为归纳的表面制备及液滴运输实验研究进展。
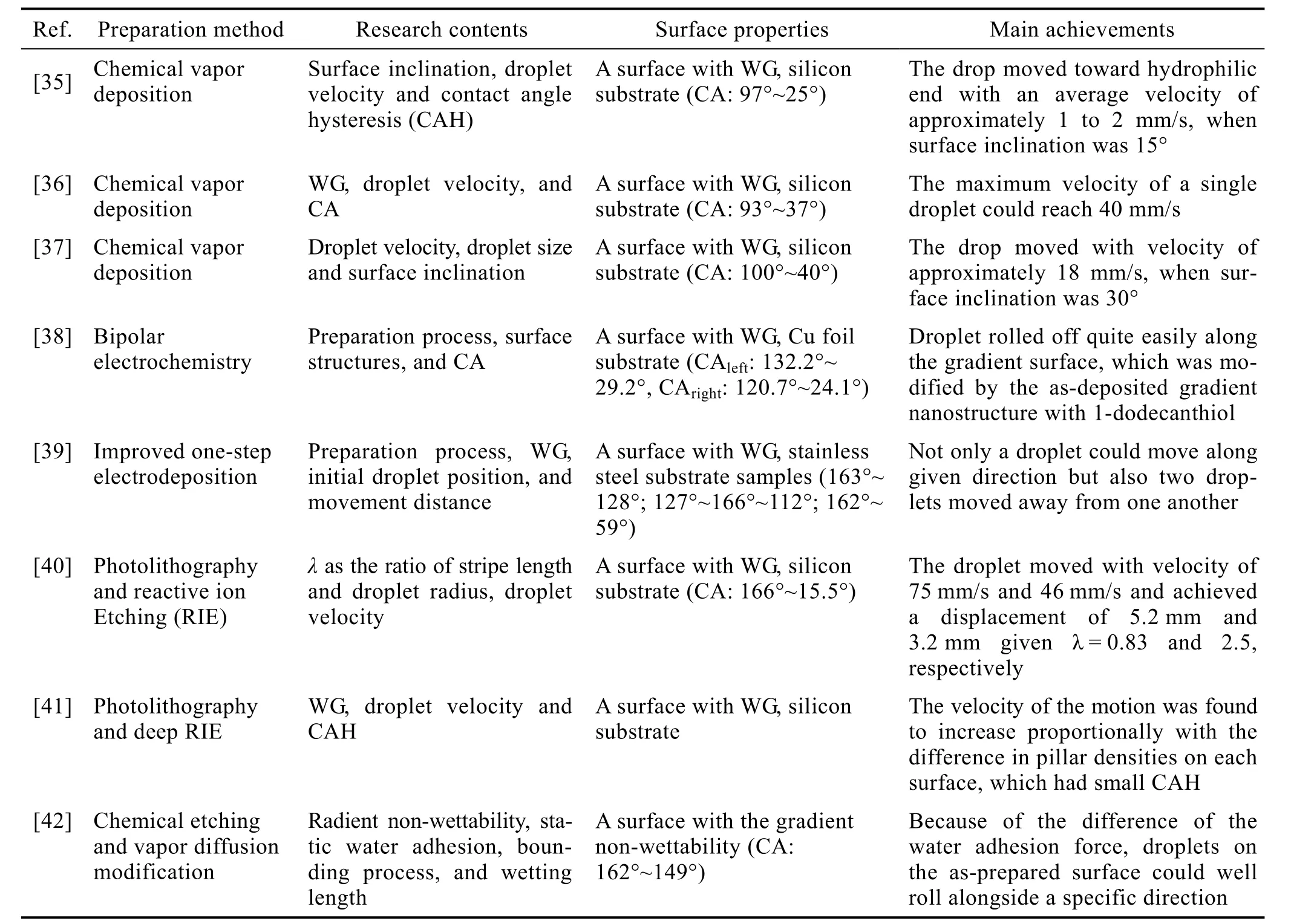
表2 润湿梯度表面液滴运动的实验研究进展 Tab.2 Experiment research progress of droplet movement on surface with wettability gradient (WG)
与理论及数值研究部分的结论相对应,液滴在高梯度、低接触角滞后的表面上更容易实现导向运动。显然,高性能表面的制备对该领域的进一步发展尤为重要。结合表2 看,液滴在润湿梯度表面上最大的运动速度只达到75 mm/s[40],而且润湿梯度表面存在润湿性范围瓶颈,最大润湿性跨度为0°~180°,这对液滴的运动距离存在巨大限制。因此,润湿梯度驱动的液滴运输在实际工业领域中的应用性并不是很强。综上所述,开发自发、快速、长距离液滴运输的驱动机制仍是接下来需要思考的重要课题。
3 超疏水基底异性轨道表面上重力驱动的导向运动
3.1 表面制备及液滴运输实验研究
超疏水基底异性轨道表面是指在具有超疏水润湿性的基底上,通过物理或化学方法刻出疏水或亲水导向轨道的表面。液滴由于受表面异性的范德华力作用,可以在自重力驱动下沿在超疏水基底设计的异性轨道作导向运动。稻叶上的水珠沿着叶茎线滚落[44],还有前文提到的沙漠甲虫[3-4]、猪笼草[5-7]、仙人掌茎[8-10]等,都是大自然中应用该原理的成功范例。这种生物启发的液滴运输技术受到很多学者关注。具体到科学研究中,超疏水基底的制备大多采用的是构造微纳米粗糙结构和涂覆低表面能物质结合的方法。但制备出的表面稳定性与时效性一直是困扰学界的难题。最新提出的去耦合机制将表面浸润性和机械稳定性拆分至两种不同的结构尺度,通过在两个结构尺度上分别进行优化设计,为超疏水表面创造出具有优良机械稳定性的微结构表面,解决了超疏水表面机械稳定性不足的关键问题[45]。高性能超疏水基底是实验研究该课题的基础,另一方面,异性轨道的制备对液滴的受控导向运动更加关键,目前常见的制备方法包括铣削[48,50]、印刷[49]、电化学蚀刻和光刻[47,51-52]等。
液滴在制备出的超疏水基底异性轨道表面上能否沿路径线实现导向运动,需要经过实验研究的验证。Xu 等[46]首先通过实验证明了水滴在超疏水基底异性路径线上的导向运输,当图案化的超疏水表面的倾斜角度和水滴的体积对应时,水滴的滑动精确地遵循路径线。除表面倾角和液滴尺寸外,轨道宽度[47-48,50-51,53]也是影响液滴在表面运动的重要因素。表3 列出了超疏水基底异性轨道表面上液滴运动的实验研究进展。部分学者在实验结果的基础上对接到实际应用的测试,如Mertaniemi 等[48]将两个液滴在两条轨道的交叉点混合,为生物危险微流体的混合研究提供了指导方向;Yang 等[50]制造平行且变窄的双轨亲水轨道,用于控制微流控芯片上液滴的运输、混合、捕获和释放。
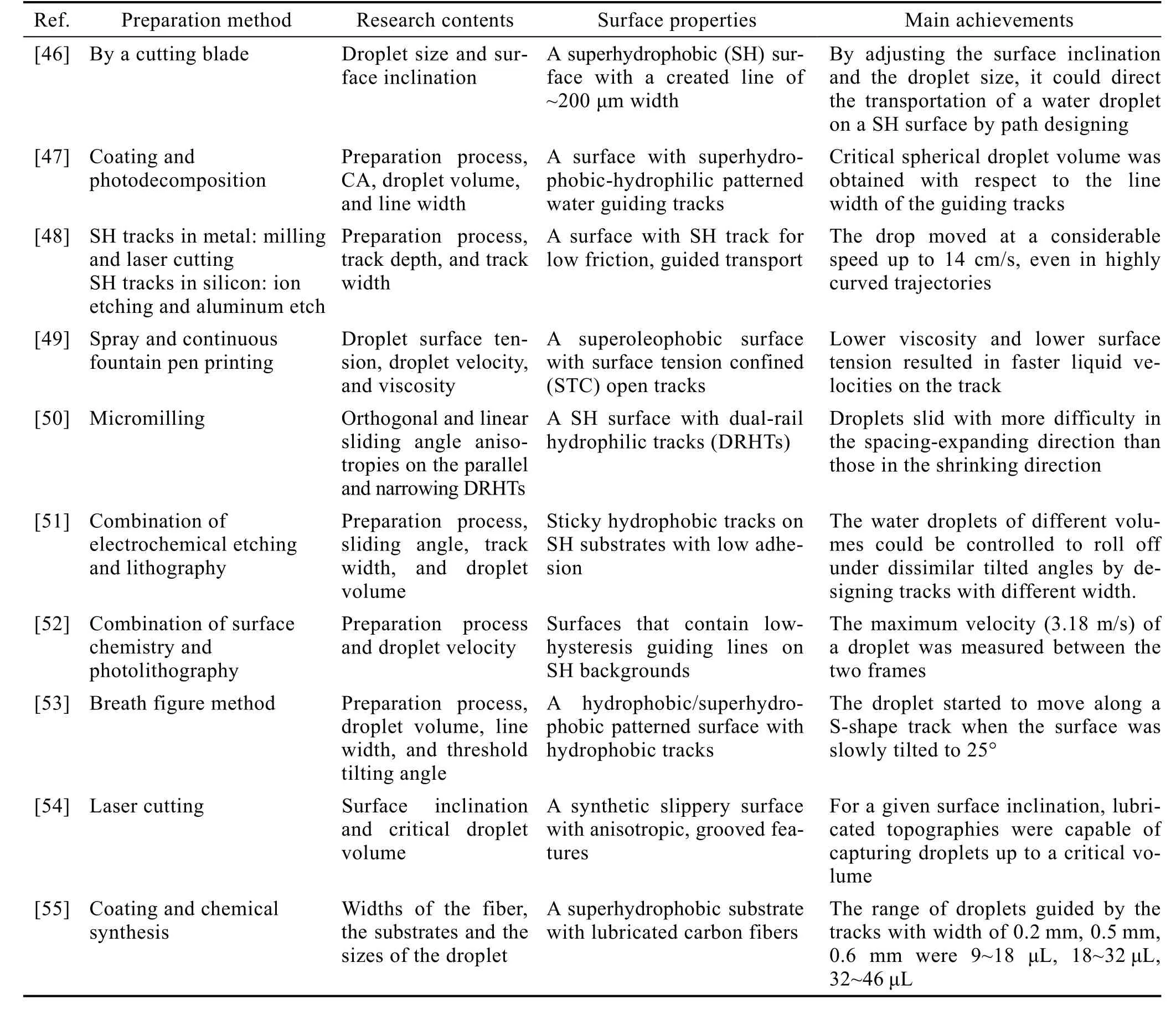
表3 超疏水基底异性轨道表面上液滴运动的实验研究进展 Tab.3 Experiment research progress of droplet movement on superhydrophobic substrate with anisotropic track
液滴在超疏水基底异性轨道表面上的受控运动主要受轨道宽度[47-48,50-51,53,55]、轨道性质[46-55]、自身尺寸[46-47,51,53-55]、自身表面张力[49]、表面倾角[49,54]和表面滑动角[47,50-51,53]的影响。综合表3 的研究进展,异性轨道以低粘附性的疏水轨道为主,低表面张力液滴在轨道的导向运输效率相对较高,轨道宽度与液滴尺寸、表面倾角相互联系。与润湿梯度表面上的液滴导向运输效率相比,异性轨道表面上的受控导向运动速度明显上升一个量级,沿整段轨道的运动速度可达到14 cm/s[48]。所以,该研究对雾收集、微流控系统的优化设计等具有实用意义。研究人员在此基础上也确实已经取得一些面向应用的成果[6,48,50,57,59-67]。
3.2 相关领域的应用研究
微流控是一种精确控制微尺度流体,尤其特指亚微米流体的技术。应用到微流体生物芯片,它可以帮助生物学家创造可控的医学检测平台和化学合成平台。
医学检测包括病毒检测,尤其是最近,病毒的肆虐一直威胁着全球人类的健康。孔文等[56]以甲型H1N1 流感病毒检测为例,基于微流控等温扩增技术建立了一种简便、快速的流感病毒检测方法,为呼吸道传染病疫情防控提供技术指导。具体到润湿性表面在微流控的应用,除上述Mertaniemi 等[48]和Yang等[50]涉及的微流控应用研究,严春芳等[57]制备具有亲疏水图案化的微流控纸芯片,将制得的纸芯片用于人体全血中血糖含量的测定,线性范围为 1.7~ 17.7 mmol/L,可满足血液样品中血糖的测定。该技术能有效避免等离子体气渗漏所造成的亲水通道扩张,实现模具图形向滤纸的高精度转移。Shang 等[6]通过铁流体组装模板法,在人工猪笼草骨膜表面制备了微流体器件。该装置为Y 形,带有两个臂通道和一个用于合成反应的长通道。高锰酸钾和抗坏血酸的水溶液分别在两个臂通道上释放,由于在生物启发通道上的导向运输,两种流体在长通道中汇聚,颜色消失则表明反应完成。
淡水对维持人类健康至关重要。世界上三分之二的地区正经历水资源短缺,特别是半干旱和干旱地区。淡水资源匮乏正成为人类社会可持续发展的重要制约,而大气中的雾水约占地球上所有淡水资源的10%[58]。超疏水基底上异性轨道图案表面应用到雾收集领域中的研究,近年来获得丰富的成果[59-63]。
Wu 等[59]设计了一条直线的超亲水轨道,该轨道在超疏水表面上具有高对比度和定向润湿性。尽管液滴在平行于轨道的方向上更容易滑动,但由于混合液滴的堆积面积较大,因此这种带状轨道表面在垂直于轨道的方向上具有更高的雾收集效率。作者还研究了轨道宽度和间距对雾收集效率的影响。所有各向异性表面中,轨道宽度和间距分别为300 μm 和3000 μm的表面,表现出最大约26%的效率差异,表明该表面雾收集性能最佳。超疏水基底上亲水轨道的粘附性是运输所收集的水滴不得不考虑的影响因素。所以,注入润滑剂的疏水轨道[60]和“亲水不沾水”的定向光滑粗糙表面[61]可用于进一步的高效集输水。
除直流型轨道外,图案化轨道表面也存在对雾收集性能的影响。雾收集试验表明,具有楔形图案的表面具有较高的集水效率[62],这是由于液体内部Laplace压力梯度与接触角滞后对比,楔形轨道上的水滴更易于收缩和分离。
开发新型材料表面膜也可以显著提高集水能力。Wu 等[63]研究了一种新型疏水/亲水定向芯吸纳米纤维膜。与相同结构和尺寸的疏水/亲水膜相比,定向芯吸纤维膜具有更高的集水能力。孔隙结构和尺寸都会影响集水效率,疏水层和亲水层之间孔隙尺寸的变化可导致集水能力相差1.7 倍,疏水层中较大的孔隙和超亲水层中较小的孔隙,更有助于将水从疏水面吸到超亲水面。
换热器在许多工业领域中应用广泛,它的性能优劣对于能源系统的整体能效和经济成本非常重要。如前所述,常用的铝、铜和不锈钢等换热器材料,由于具有天然亲水性,难以有效排除换热表面的冷凝液滴,而润湿异性轨道图案表面对加强冷凝换热有很大的应用意义。
Alwazzan 等[64]在铜管表面构造疏水性不同的条纹图案,疏水性较强的基底区域具有快速的液滴流动性,疏水性较弱的条纹轨道区域能使液滴沿路径线导向运动。在最佳宽度比下,该表面的传热性能比膜状凝结和珠状凝结分别高480%和180%。除了平行的润湿异性条纹轨道图案表面,其他如倒V 形疏-亲水轨道图案表面[65]、楔形轨道图案表面[66]、疏水基底圆形亲水图案表面[67]、树状疏-亲水轨道图案表面[67]等被学者相继研究,用以加强冷凝换热。
液滴在润湿异性轨道表面受重力的导向运动,尽管在生物医学检测、淡水收集、换热器等领域的应用已获得丰富的成果,但固定的驱动机制限制了液滴导向运输的进一步发展,而且表面润湿异性轨道的结构使液滴的导向路径受限。所以,如何提高液滴导向运输的可操纵性和智能性是该课题面临的关键问题。
4 超疏水表面上外场驱动的导向运动
4.1 光、电、热、磁诱导驱动
无论是通过固体表面润湿梯度驱动液滴,还是通过自重力使液滴在异性受限轨道上运动,它们都存在一个共同的问题,即缺乏可操纵性和智能性。利用液滴对外场的响应可以很好地解决这个问题,因而研究人员在利用光、电、热和磁外场,来实现可操纵化和智能化的液滴导向运输作出了巨大努力[68-99]。
光并不能直接给固体表面上的液滴提供驱动力。但是,来自光照射的能量能被固体表面的特殊光响应分子吸收,从而改变表面特性。Ichimura[68]首次发现由于偶氮苯的光异构化,不对称的光辐射会导致表面能出现梯度,从而能实现液滴的导向运动。值得注意的是,改变光强度梯度的陡度及方向,还可以调整运动的速度及方向。在此基础上,类似的偶氮苯光敏聚合物材料表面上的液滴运输被学者相继发现,实现了纤维光控集水[69]、液滴混合[70-71]、多梯度表面混合驱动[72]、紫外线响应的智能化可编程液滴[73]等。光不但能被特殊光敏聚合物吸收响应,而且能引起热响应。由于光的外部刺激,纳米结构表面会出现不均匀的热膨胀,导致纳米结构表面倾斜,从而驱动液滴沿着预设轨道导向运动[74]。液滴运动过程中,表面的钉扎阻力一直是制约液滴运动的关键因素。管状光驱动的液晶聚合物系统[71]突破了这个难题,摆脱了接触线钉扎阻力的影响。该系统可以引起不对称的液滴形态,通过毛细作用力可逆地操纵液滴,并且实验表明可以通过各种形状的微致动器混合多相液体(直线形、Y 形、蛇形和螺旋形)。
电对液滴作用的研究由来已久。Lippmann[75]首次观察到电毛细上升现象。Beni 等[76]首次提出电润湿的概念。电润湿(Electrowetting,EW)是指通过改变液滴与绝缘基板之间的电压来改变液滴在基板上的润湿性,即改变接触角,使液滴发生形变、位移的现象。电润湿作为一种微流体现象,已经广泛被用作各种流体及电光设备的驱动机制。随着超疏水材料研究的不断完善[45,77],基于超疏水表面的新型电控液滴技术[78]引起了学者广泛关注。这些技术包括电晕放电驱动介电液滴[79]、“全能型”静电操纵液滴[80]、电场梯度驱动液滴[81]以及表面电荷密度梯度驱动液滴[82]。其中,表面电荷密度梯度驱动液滴的新型机制,实现了无额外能量输入情况下液滴的长距离、高速运输。Sun 等[82]通过液体接触操控表面电荷,将一串液滴滴向超双疏表面,液滴撞击到表面时,会立刻扩散、收缩并弹回。这导致电子从液滴中分离出来,并使受到撞击的表面区域带负电荷。通过调节液滴的撞击高度,表面电荷密度会发生变化,所以形成电荷密度梯度。随后,将液滴再次放到超双疏表面时,表面电荷密度梯度会产生驱动力作用,推动液滴向高电荷密度方向移动。这种新型机制有望用于开发新的微流控和传感系统。
水滴滴在温度高于Leidenfrost 点的固体表面会完全悬浮,呈现“完全超疏水状态”,这就是著名的Leidenfrost 效应。水滴与表面之间的薄蒸汽层在液滴运动中起主要作用。在固体表面使用非对称结构能推动悬浮液滴自发运动。Linke 等[83]首次报道了毫米级棘轮上的Leidenfrost 液滴可以自发地向与倾斜棘轮相反的方向推进。以棘轮结构为基础,更多的改进棘轮结构,如棘轮复合薄膜[84]、表面形貌连续变化的棘轮[85]、双尺度棘轮[86]等,被陆续发现,用于优化Leidenfrost 液滴的自推进运动。此外,液滴停滞温度阈值[87]、初始液滴大小和棘轮纵横比[88]等参数也被相继研究,为进一步优化棘轮结构上的Leidenfrost液滴运动提供了详细数据参考。除棘轮结构外,还有学者利用前述的润湿梯度对热表面的液滴产生非对称作用力[89-90],液滴会倾向于朝着微柱密度更小的区域自推进,进一步丰富了Leidenfrost 液滴操控技术。
关于液滴运输的所有驱动方式中,磁场由于其易操作、低能耗而吸引了越来越多研究人员的注意。早期的磁控液滴技术是通过在液滴中加入磁性物质,在磁场作用下,磁性液滴被吸引而运动[91-94]。这种改变液滴组分的磁控传输技术在各种应用中存在局限性。新兴的磁控液滴技术规避了液滴组分的改变,通过在基底表面固定磁性物质,然后施加磁场使液滴周围表面发生变化,实现液滴的受控运输。这种磁响应表面可分为三类[95],即磁性可弯曲微结构表面[96-97]、可切换形貌表面[98]和注入铁磁流体表面[99]。表面的磁性微柱在磁场吸引下,会发生弯曲变形,导致表面的润湿性发生变化。Lin 等[96]基于此原理,发现了一种动态润湿性的超疏水磁性微柱阵列,其具有磁感应倾角动态变化的特性,实现了对液滴导向输运的有效控制。液滴周围表面地形的变化会直接作用于液滴。Damodara 等[98]发现了在PDMS-铁颗粒复合基底的超疏水表面上的水滴受控运动,由于作用在铁颗粒上的磁力,液滴周围的表面轮廓发生变化,从而驱动液滴运动。相比于高强度磁场作用于表面结构,铁磁流体表面所要求的磁场强度低得多[95]。铁磁流体是悬浮在油或水中的铁磁性颗粒(~10 nm)在磁场作用时强烈极化的液体。最近的研究中,Mandal 等[99]报道了磁场作用下油基铁磁流体尖峰上水滴的传输,分析了液滴运动过程中所受的三种力和影响因素。
4.2 各种液滴运输技术的优缺点分析
就光、电、热和磁四种外场诱导的液滴导向运输而言,光控技术比较容易控制且安全性较高,但是需要特殊仪器才能产生特定波长且具备响应性的光,如紫外线。外加电场安全系数低,新型电控液滴技术高效智能,可编程液滴有望进一步应用于微流控、微反应器、防冰防霜等领域。热控技术的实现方式较简单,本质上依赖于表面的非对称结构,然而工业领域中的很多基材不具备耐高温属性。磁场安全、可无损操控,响应性也很强,但通常需要磁性材料来辅助操纵液体。
对比润湿梯度和异性轨道表面的液滴运输技术,光、电、磁诱导的液滴运输可控性更强,液滴运动的方向并不受表面结构限制。但是,宏观外场不能局限某一小型区域,所以对于多液滴的操纵,如果液滴之间的间距太小,多液滴之间会相互影响。因此,结合固体表面的润湿梯度和异性轨道,设计出“高分辨率”的多液滴导向运输系统,是未来值得深入研究的方向之一。
5 总结与展望
本文介绍了液固接触和液滴运动的基本理论,还总结了液滴在不同润湿性表面上导向运动的不同驱动机制。本文不但介绍最具代表性的研究工作,而且指出不同部分仍存在的挑战。液滴驱动机制的发现一直是液滴导向运输研究中的关键。相信随着技术的不断进步,未来会有更多的驱动机制被发现。
无论驱动机制未来如何变化,液滴运动过程中本质上的力学机制一直不变,目前大多数研究侧重于驱动力、阻力等常见的力学特性,而对更复杂的液滴运动(如曲线运动)过程中涉及到的其他力(如离心力、表面张力等)鲜有研究。这些往往会影响到液滴导向运输的可控性。
为提高液滴导向运输的可控性,通常需要液滴对外场的响应。最常见的方法是本文提到的四种方法:光、电、热和磁。在不使用外场的情况下,则需要通过表面的形态或化学组成等特性来控制液体,如润湿梯度和异性轨道等。所以,耦合多种外场结合固体表面的设计来控制单液滴或多液滴的运输,是未来极具吸引力的研究方向。
科学研究的意义在于为实际应用奠定基础。尽管学者已经发现了液体导向运输的某些应用,例如集水、微流控等,但它们仍处于实验室的实验研究阶段,如何对接工业领域是至关重要的问题。对此问题最大的挑战在于液滴速度的智能化控制和润湿性固体表面的量产化制备。在集水领域,优化材料表面对液滴的功能化作用有限,集水效率存在瓶颈,且实验室的可操纵性与实际应用场景的可操纵性有很大差距,所以难以真正在缺水地区大规模普及。为克服集水效率低的问题,可以考虑采用外场作用来提高液滴的运输效率,同时开发对应外场响应的应用程序来提高可控性与智能性。在微流控领域,传统的封闭式微流体系统采取压力、电渗等驱动方式,系统中微滴控制的精准性有待提高,而开放式微流控系统中的微流体具有较小的运输阻力和较高的可控性,但驱动机制的问题限制了它的进一步发展。同样地,运用外场对表面或液滴的响应性结合表面润湿性设计是一个很好的解决方法。
猜你喜欢
煤炭学报(2021年2期)2021-03-24
作文·小学低年级(2020年6期)2020-07-14
高校化学工程学报(2020年2期)2020-06-10
原子能科学技术(2020年1期)2020-03-30
中华老年口腔医学杂志(2016年4期)2017-01-15
西南石油大学学报(自然科学版)(2016年6期)2017-01-15
西安石油大学学报(自然科学版)(2015年4期)2015-12-16
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
原子能科学技术(2015年1期)2015-03-20
断块油气田(2011年2期)2011-04-26