
6R机器人过路径点的轨迹规划与MATLAB仿真
2020-11-26 03:59:20陆原超周俊荣雷焱焱梁林海刘德时吕超超王瑞超李会军
机械工程师 2020年10期
陆原超,周俊荣,雷焱焱,梁林海,刘德时,吕超超,王瑞超,李会军
(1.五邑大学 智能制造学部,广东 江门529020;2.深圳市创世纪机械有限公司,广东 深圳518000)
0 引 言
随着工业自动化不断发展,工业机器人替代了工业领域中大量重复性的人工作业,凭借工业机器人高效率、高准确性、灵活和廉价等特点,极大地提高了企业生产力,减轻了工人的负担,甚至能完成更加危险或是人类无法完成的工作[1]。关节型机器人(也称机械臂或机械手)是工业应用中最为常见的,形式上从低自由度到冗余自由度不等[2],六自由度(6R)机器人因其相对于低自由度机器人更灵活与相对于高自由度机器人求解控制更方便得到了广泛的应用。
运动的平稳有效是工业机器人需要保持的要点,这就需要减少速度和加速度的突变,避免由此引发的振动冲击与机械磨损。机器人的运动精度和性能由轨迹规划(trajectory planning)所决定,这是机器人应用与自动化的基本问题[3],通过适当的轨迹规划方法,可以使机器人运动轨迹平滑、无冲击高效地完成任务。
1 机器人模型建立
本文使用北京某公司IRS300机器人产品为研究对象,以标准D-H法为基础建立机器人的运动模型[4-7],该机器人的D-H参数如表1所示。
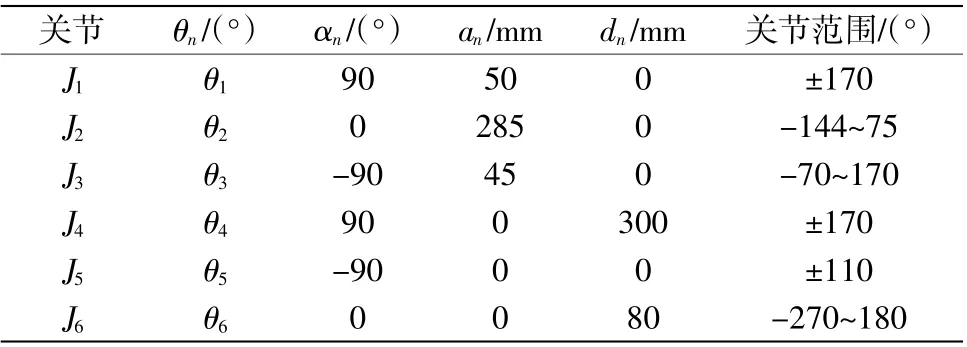
表1 IRS300标准D-H参数表
2 目标函数构造
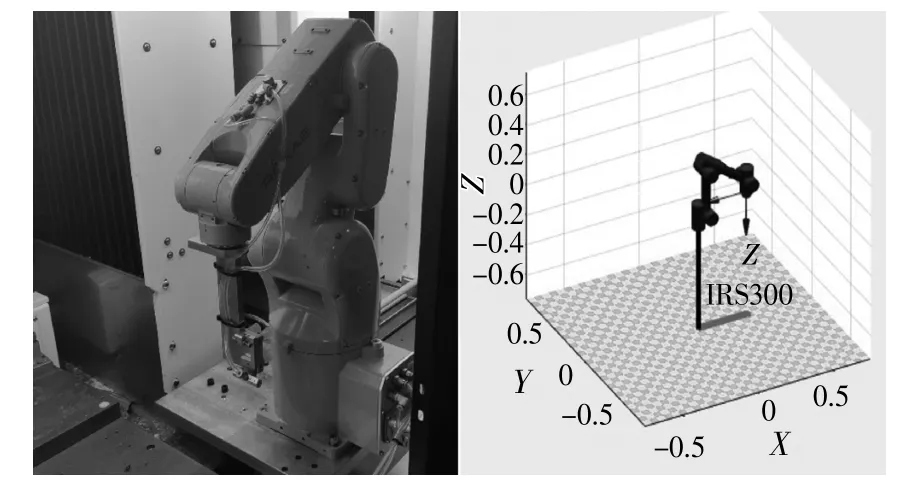
图1 机器人物理模型与仿真模型
轨迹规划可以分为注重末端执行器的笛卡尔空间轨迹规划和以各关节关节角为基础的关节空间轨迹规划[2,6—7]。将各关节的角度变量视为时间的函数,直接针对机器人的执行关节进行规划,即关节空间的轨迹规划,这样的好处是省去了关节坐标与笛卡尔坐标的转换,计算较容易,也不会引发奇异性问题,缺点是无法保证其在笛卡尔空间中的运动轨迹[2]。本文研究的机器人工作目标为替加工中心上下料,对工作路径没有要求,故采用关节空间的规划方法。
常见的关节空间轨迹规划方法有直线插值法、多项式插值法和样条曲线插值法等[8],因机器人夹持工件的方式为真空吸附,上下料过程应尽量减少冲击,以免造成工件与机械臂相对位置的变动,导致加工出现废品。三次多项式轨迹规划工业上最为常用,但是对于需要途径中间点的情况,无法保证在中间点时不出现速度畸变[9]。通常遇到这种情况会增加多项式的次数,然而多项式插值次数过高容易引发隆格现象,导致轨迹失真,故综合考虑采用五次多项式插值进行轨迹规划。
2.1 五次多项式插值数学模型
五次多项式共有6个未知的待定系数,需要6个约束条件来确定函数的唯一性,分别由初始点及目标点的角度、角速度和角加速度来给出。设θ(t)是代表某关节角度随时间变化的函数,则其速度—时间函数与加速度—时间函数分别为θ′(t)与θ"(t)。
机器人一个关节的五次多项式函数为

2.2 过中间路径点的五次多项式
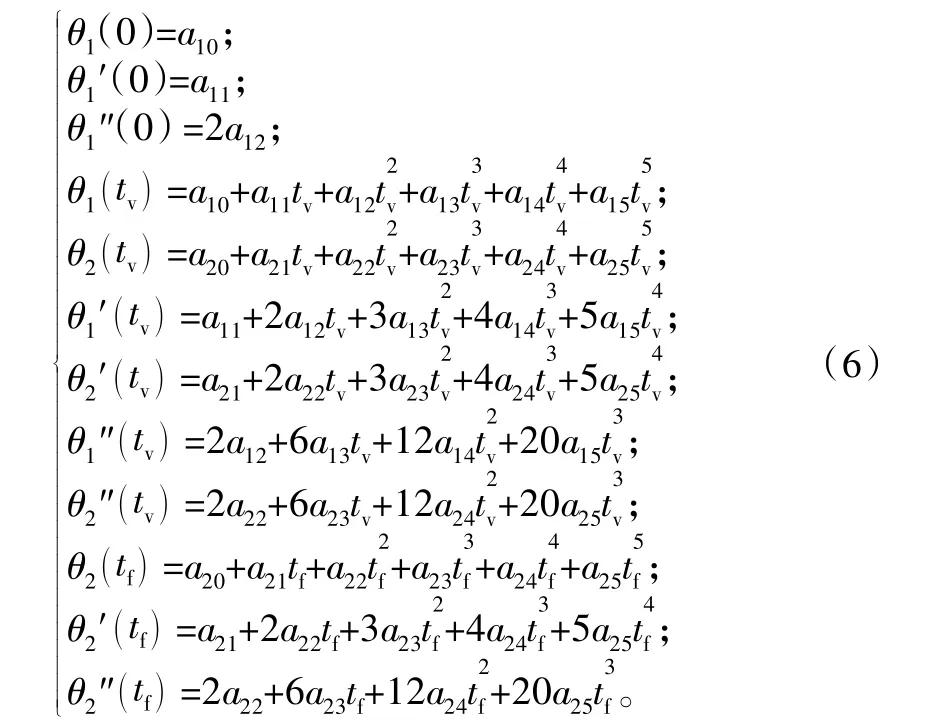
与无中间点的情形类似,可以将中间点看作前一段“初始点”或后一段的“结束点”,这里的“初始点”和“结束点”并不是真正意义上的初始点和结束点,此时中间点处关节速度与关节加速度连续[10-11]。
设从初始点到中间点的插值函数为θ1(t) ,从中间点到结束点的插值函数为θ2(t),表示为:

初始点、中间点和结束点对应的时刻分别为0、tv和tf,根据约束条件可以列出等式为:
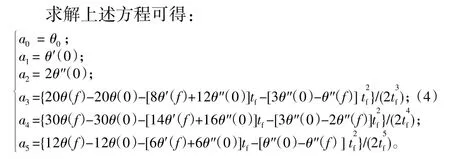
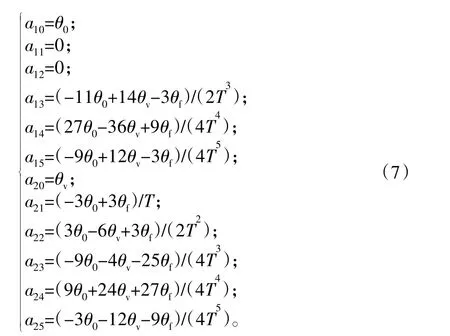
对时间区间[0,tv]和[tv,tf]作归一化处理,使其时间长度相等且都为T,各点对应的角度值分别为θ0、θv和θf,求解可得:
3 MATLAB仿真
机器人运动过程需保证末端轨迹从初始点开始,依次经过上料点和下料点,再返回初始点待料,已知三点的关节空间坐标,对应角度值如表2所示。
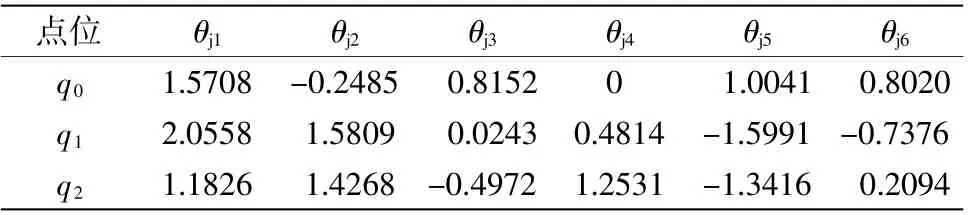
表2 关节空间的角度插值点 (°)
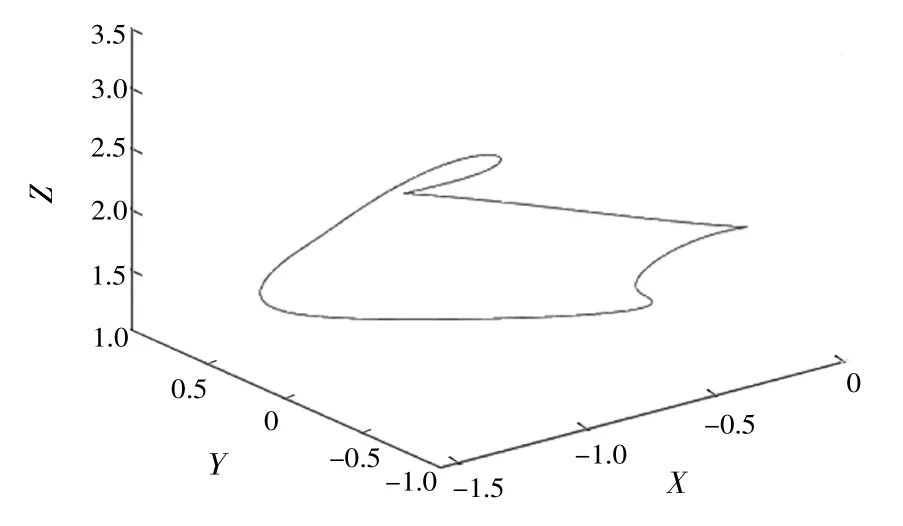
图2 机器人末端执行器空间轨迹
图3~图5 给出了五次插值与三次插值条件下各关节的关节参数-时间曲线,其中点划线代表五次插值轨迹规划,实线代表三次插值轨迹规划。由图3 可以看出,五次插值轨迹规划条件下,相较于三次插值各关节的角度变化更为平滑,减少了不必要的关节重复运动,其中最明显的为关节2;由图4 可以看出,五次插值轨迹规划条件下的关节角速度相对三次插值更恒定,最大绝对角速度也更小,最明显的为关节2,五次插值下关节最大角速度比三次插值条件下小了29.5%;由图5 可以明显地发现,三次插值轨迹规划会产生较多的角加速度突变,关节电动机将会由此产生冲击,而五次插值轨迹规划条件下仍能保持加速度曲线光滑,可以避免冲击,提高了机器人运行的稳定性和寿命。
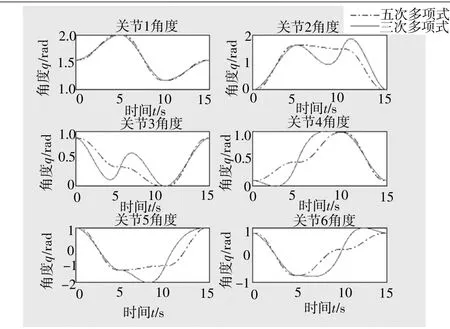
图3 机器人各关节角度-时间曲线
4 结 语
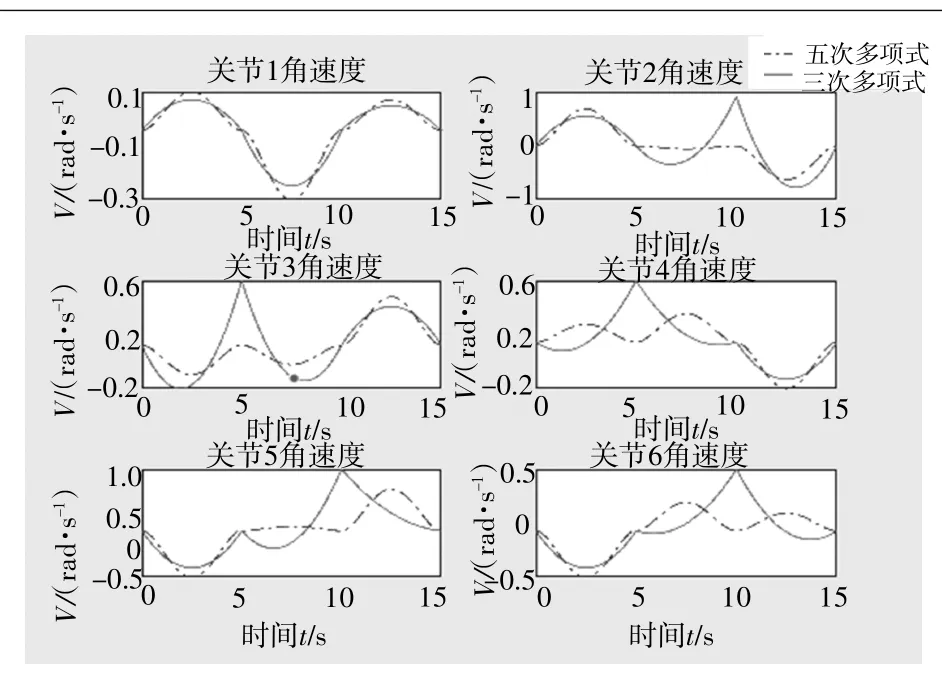
图4 机器人各关节角速度-时间曲线
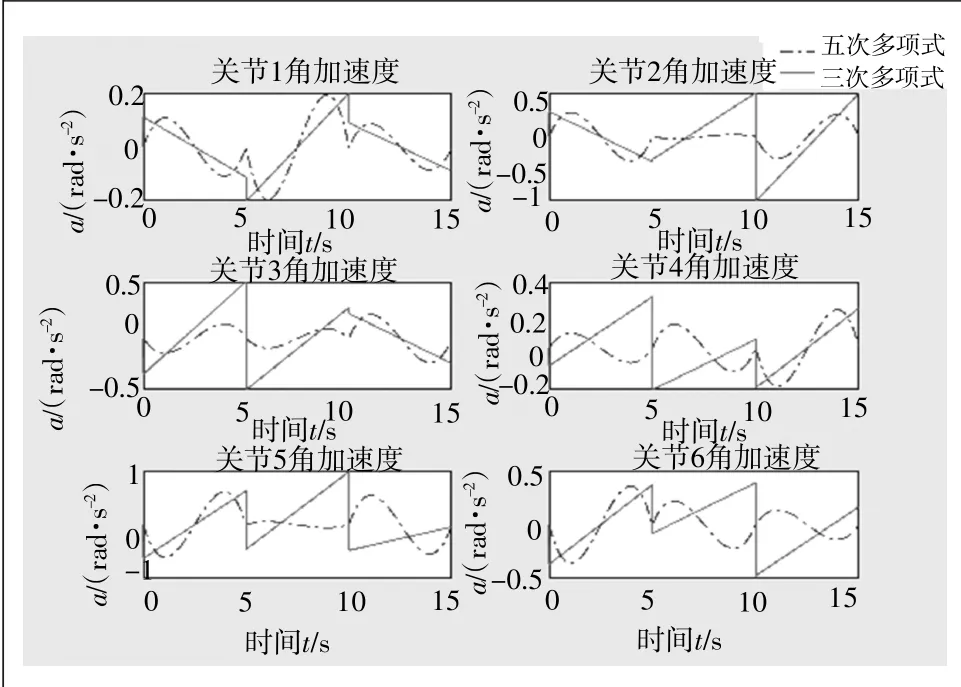
图5 机器人各关节角加速度-时间曲线
本文针对IRS300 六关节机器人实际上下料的工艺要求,提出基于五次多项式插值的过路径点的轨迹规划,并通过MATLAB 对其进行了仿真实验。仿真结果表明,过路径点的五次多项式插值方法可以保证机器人各关节角度、角速度和角加速度曲线都连续,避免了运动过程中由于加速度突变引发的冲击和振动,有效提升了机器人运行的稳定性和寿命,为机器人在工业自动化领域的实际应用提供了理论参考。
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
西南石油大学学报(自然科学版)(2019年1期)2019-01-28 09:33:52
现代装饰(2018年5期)2018-05-26 09:09:39
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
中国三峡(2017年2期)2017-06-09 08:15:29
电测与仪表(2016年10期)2016-04-12 00:26:24
电测与仪表(2016年14期)2016-04-11 12:32:48
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
