
球载CRDS高灵敏度甲烷测量系统的研制
2020-11-13 03:38:32何亚柏许振宇阚瑞峰
光学精密工程 2020年9期
袁 峰,高 晶,姚 路,陈 兵,何亚柏,胡 迈,许振宇,阚瑞峰
(1.中国科学院 安徽光学精密机械研究所 环境光学与技术重点实验室,安徽 合肥 230031;2.中国科学技术大学,安徽 合肥 230026;3.中国科学院 青藏高原研究所,北京 100101;4.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
1 引 言
青藏高原冻土区是我国最重要的湿地分布区域之一,湿地面积达到1.3×105km2。近年来的研究表明,青藏高原湿地冻土区表现为碳汇作用,但是最近公布的监测结果显示,在青藏高原冻土区湿地,大气本底甲烷的浓度上升趋势高于同期全球平均水平,而对于此种甲烷浓度的异常与成因目前尚缺乏系统性的研究[1-2]。
青藏高原生态系统与大气系统的甲烷交换需要连续准确地观测青藏高原地区大气中的甲烷时空浓度分布特征。目前,大气气体含量的时空分布测量主要通过傅里叶变换红外光谱(FTIR)、差分吸收光谱(DOS)以及激光雷达等遥测技术实现[3],基于机载、球载和无人机等平台的原位测量技术由于具有更高的时间和空间分辨率,在大气痕量气体的时空分布测量方面也引起了科研人员的关注[4-5]。名古屋大学Yutaka Matsumi等设计了基于非色散红外(NDIR)二氧化碳球载垂直廓线测量装置[6]。法国兰斯大学Lilian Joly等开发了球载近红外和中红外可调谐二极管激光吸收光谱(Tunable Diode Laser Absorption Spectroscopy,TDLAS)装置,分别应用在二氧化碳垂直廓线测量和大气对流层和同温层甲烷浓度测量中[7-8]。中国科学院安徽光机所姚路等开发了小型化球载TDLAS二氧化碳廓线测量装置[9]。相比于NDIR和TDLAS技术,通过腔增强实现更高检测灵敏度的腔衰荡光谱技术(Cavity Ring-down Spectroscopy,CRDS)因其装置简单和更高的检测灵敏度等优点,而在基于球载平台的痕量气体原位测量方面具有更好的应用前景。
CRDS技术中,光在两个高反射率平凹透镜组成的光腔内来回反射,在几十厘米的物理长度实现几十公里的等效吸收光程,使得检测灵敏度相对于TDLAS大大提高。CRDS通过测量衰荡信号的时间性质间接测量光谱吸收系数,使得测量的光谱吸收系数与光源强度波动无关。另外,相对TDLAS调制光谱技术,CRDS测得的吸收系数是绝对吸收系数,不需要频繁校准,测量结果同时具有好的线性和重复性。因此,相对于其他球载原位探测技术,CRDS在痕量气体检测方面具有明显优势[10-11]。
本文针对青藏高原甲烷垂直浓度廓线的测量,研制了一套基于CRDS技术的球载高灵敏度甲烷浓度测量系统。该系统利用长度为700 mm的腔和反射率大于99.99%的镜片组成光学腔,在基于 DSP的单板电路上实现CRDS测量算法和数据处理,包括腔模锁定、衰荡信号采集与计算、光谱扫描和拟合、浓度反演等功能,优化了光谱曲线拟合算法并仿真比较了不同噪声水平下算法改进前后的浓度计算结果。该测量系统已于2019年4月在西藏鲁朗地区进行了实际测量试验,成功实现从地面海拔约3 340 m到6 000 m处的甲烷垂直浓度测量,测量结果验证了球载CRDS的性能,并为系统的进一步优化提供了方向,同时也为其他痕量气体的球载检测装置设计提供参考。
2 测量原理与光谱处理算法
2.1 CRDS测量原理
一束单色光垂直通过某一非散射的均匀物质时,由于光与物质的相互作用使得透射光发生衰减,衰减量与穿过物质的有效吸收光程和物质本身的吸光性质有关。Beer-Lambert定律描述了透射光强和入射光强之间的关系,即:
Iυ=I0υexp(-αυL),
(1)
其中:I0υ和Iυ分别为频率υ处的入射光强和透射光强,αυ为频率υ处样品气体的光谱吸收系数,L为有效吸收光程。
一束激光耦合进一个充有气体的光腔,当频率为υ、强度为I0υ的入射光与光腔发生共振时,立刻切断输入光,经过时间t后光腔的透射光强为:
(2)
其中:R为光腔腔镜的反射率,c为光速,L为反射镜之间的距离。由式(2)可以看出,切断输入光后,光腔透射光强度呈指数衰减,在CRDS中,把透射光强衰减至其1/e时所需的时间称为衰荡时间,即有:
(3)
所以,衰荡时间与腔长、镜片反射率和腔内气体光谱吸收系数有关,式(3)是CRDS技术的理论基础。腔内气体无吸收时衰荡时间为:
(4)
由式(3)和式(4)可知,腔内气体的光谱吸收系数为:
(5)
因此,可以通过测量腔内有气体吸收时和无吸收时的衰荡时间计算腔内气体的光谱吸收系数,根据腔内气体的光谱吸收系数确定腔内气体浓度。
CRDS技术的高测量灵敏度主要是激光与光学腔共振的结果。激光与腔的共振主要有两种实现方式,第一种是改变光腔腔长匹配入射激光波长实现共振,第二种是改变激光波长匹配光腔腔长实现共振。第二种实现方式下,由于光腔腔长的固定使得光腔纵模之间的间隔不变,激光波长顺序与待扫描波长范围内所有的纵模发生匹配,通过光腔纵模间隔确定匹配时的激光相对波长。相对于第一种实现方式,第二种方式无需实时标定激光波长,简化了仪器结构[12-13],因此本文设计的球载CRDS系统采用第二种实现方式,即改变激光波长实现光与光腔的共振。
2.2 谱线分析
根据HITRAN 2012数据库可知甲烷在6 046.95 cm-1附近有3条相距很近的吸收谱线,表1中列出了3条谱线的爱因斯系数(E1)、压力平移系数(Pshift)、环境碰撞加宽系数(γenv)和自碰撞加宽系数(γself)。这3条谱线除了线强之外,其他参数相差都很小,因此在实际光谱处理时将3条谱线进行单个谱线处理[14]。

表1 待测光谱谱线参数
仪器设计目标是测量海拔为3 000~7 000 m的垂直甲烷浓度分布,大气压力约从0.7×105Pa变化到0.4×105Pa,温度从地面约10 ℃(283 K)变化到高空约-20 ℃(253 K)。
图1简单分析了CH4,H2O,CO2在6 046~6 048 cm-1内的吸收谱线,其中H2O的浓度根据283 K时0.7×105Pa时大气的饱和水气浓度[15]设定,CO2与CH4浓度以平原地区大气中的平均含量设定。图中可以看出,H2O在6 046.79 cm-1和6 047.78 cm-1与待测的CH4吸收谱线有部分重合,H2O浓度的提高和压力的增加都会加剧对CH4吸收谱线的干扰,因此,测量气体需要经过干燥处理。在实际应用中,让测量气体流过装有变色硅胶干燥剂的干燥管是一种合适的干燥方法。变色硅胶干燥剂的主要成分为SiO2,其化学性质稳定,对CH4既没有吸附作用也不与CH4发生化学反应,但对水汽的吸附能力强,能够吸收重达自身质量40%的水汽。在实际的光谱处理中,通过判断在H2O吸收峰处的拟合残差判断干燥效果,即在6 046.79 cm-1和6 047.78 cm-1附近的拟合残差没有明显变大,则认为干燥效果满足测量要求。
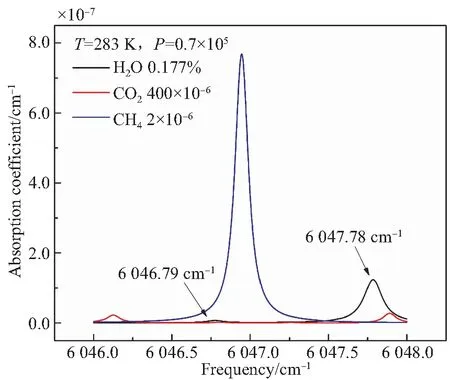
图1 甲烷吸收谱线与干扰气体谱线仿真Fig.1 Simulation of CH4 absorption feature and interference absorption of H2O vapor and CO2
2.3 光谱处理
吸收光谱技术中,2.1节式(1)中吸收系数αυ与气体浓度X、气体压力P、分子吸收线强S以及气体吸收谱线线型φ之间的关系由式(6)确定。在0.4×105~0.7×105Pa的气压内,式(6)中的吸收线型函数φ为归一化的Vogit函数,Vogit函数由中心位置υ0,洛伦兹线宽ΔυL和高斯线宽ΔυG确定,PXS值一般称为吸收系数曲线积分面积,用A表示。吸收光谱的实际应用中,一般通过非线性最小二乘算法拟合光谱吸收系数曲线α(υ)得到4个光谱参数A,υ0,ΔυL,ΔυG:
α(υ)=PXSφ(υ,υ0,ΔυL,ΔυG).
(6)
拟合吸收系数曲线得到积分面积A后,浓度X由式(7)计算得到:
(7)
式中的气体压力P通过压力计测量,线强S是温度T的函数。S与T的关系为:
(8)
式中:Q(T)是温度T时对应的配分函数,不同温度对应的配分函数值可以通过HITRAN数据库查询得到,S(T0)与Q(T0)分别是T0为296 K时的线强和配分函数,E″是以cm-1为单位的跃迁低态能级,kB是玻尔兹曼常数[16]。
仪器搭载在气球吊舱内,外面的气体通过气泵抽取进入测量光腔内,虽然吊舱内的温度在(22±5) ℃内,但吊舱外面的环境温度变化较大。温度的变化不仅会导致线强改变,影响浓度计算的准确性,还会加剧腔内气体温度的不均匀性。这里通过两种措施降低外部温度变化的影响,第一,加长进气管道和控制进气流速,使得气泵抽取的气体先被舱温预热再进入光腔;第二,测量腔内气体温度,并根据式(8)主动补偿温度引起的线强变化。式(8)中计算不同温度的线强需要已知不同温度下的配分函数Q(T)值,本文根据HITRAN数据库给出了离散温度的Q(T)值,利用多项式拟合253~303 K(-20~30 ℃)内温度T与配分函数Q(T)之间的关系,得到:
Q(T)=-97.752+1.909T+
2.956×10-4T2+3.751×10-6T3.
(9)
得到配分函数Q(T)后再根据式(8)计算线强S(T)。
A,υ0,ΔυL,ΔυG可以由式(6)中的α(υ)拟合确定,但高斯线宽ΔυG也可由温度计算确定,即:
(10)
其中:M为相对分子质量,υ0为吸收谱线的中心位置,高斯线宽可以由温度计算得到,使得实际只有3个光谱参数需要α(υ)拟合确定。为了比较4个参数拟合与3个参数拟合结果的区别,即通过温度计算固定高斯线宽拟合A,υ0,ΔυL和不固定高斯线宽拟合A,υ0,ΔυL,ΔυG结果的区别,本文仿真了不同噪声水平下两种方法的浓度计算结果,并且通过仿真评估了温度偏移计算的高斯线宽对固定高斯线宽拟合结果计算的浓度值的影响。
在固定高斯线宽与不固定高斯线宽拟合比较的仿真中,设置甲烷浓度为2×10-6,温度为296 K,气压为1.01×105Pa,产生4组幅值分别为0.002,0.006,0.01,0.014的随机噪声,每组200个,光谱信号与4组(每组200个)随机噪声分别相加构成4组(每组200个)含随机噪声的光谱信号。采用固定与不固定高斯线宽两种拟合方法计算每组的浓度值,图2是4组计算的浓度结果(彩图见期刊电子版),其中红色曲线是固定高斯线宽的计算结果,黑色曲线是不固定高斯线宽的计算结果,图中还分别给出了两种方法每组计算结果的标准差σ。4组不同噪声水平下固定高斯线宽ΔυG的计算结果都明显优于不固定高斯线宽ΔυG的计算结果。
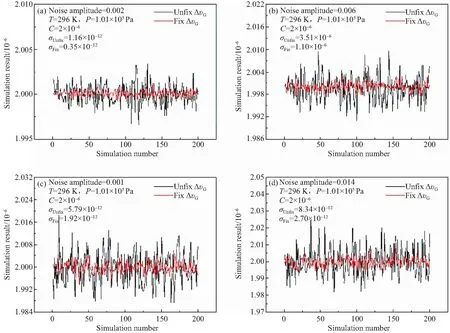
图2 不同噪声水平固定与不固定高斯线宽拟合算法的计算浓度结果比较Fig.2 Comparison of fitting algorithm between fix and unfix Gaussian linewidths in various noise levels
温度测量可能存在偏差,使得计算的ΔυG偏离真实值,为了评估ΔυG的偏差对拟合结果的影响,分别以10 ℃(283 K),15 ℃(288 K),20 ℃(293 K),25 ℃(298 K),30 ℃(303 K),35 ℃(308 K)对应的ΔυG拟合200个叠加了幅值为0.01的随机噪声,23 ℃(296 K)、1.01×105Pa、2×10-6的吸收光谱曲线,表2分别给出6个温度下浓度计算结果的均方值(RMS)和标准差σ。从RMS可以看出,当拟合设定温度小于实际温度时,计算的浓度RMS小于真实值,当拟合设定温度大于实际温度时,计算的浓度RMS大于真实值,但是计算结果对温度的偏差并不敏感,10 ℃(283 K)与35 ℃(308 K)计算的ΔυG拟合23 ℃(296 K)的光谱吸收曲线,浓度RMS偏差约0.9×10-9,因此普通的温度传感器测量精度完全满足ΔυG的计算要求,甚至在温度变化范围不大的场合,可以用环境平均温度固定高斯线宽拟合计算。在实际应用中,仪器通过测量的腔内气体温度T计算高斯线宽ΔυG,再用非线性最小二乘算法拟合其他3个光谱谱线参数。
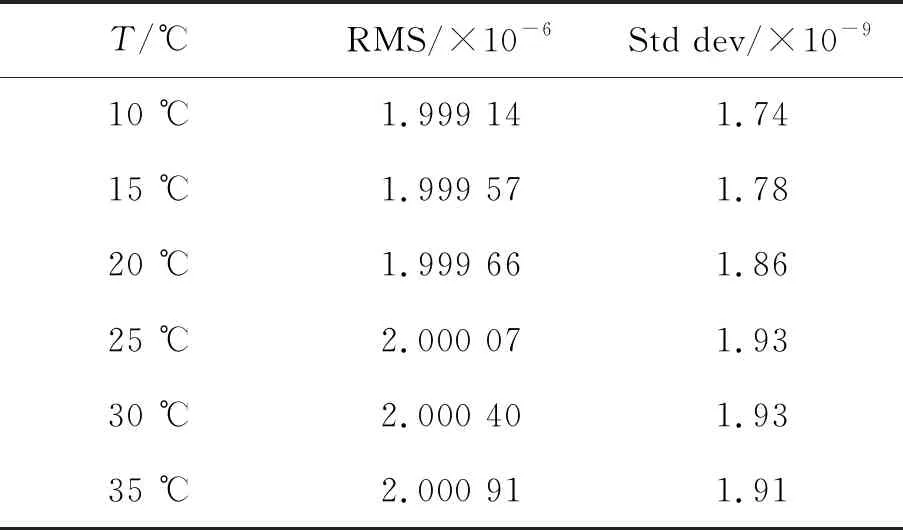
表2 不同温度对应的高斯展宽ΔυG计算296 K,2×10-6甲烷浓度仿真结果
3 测量方案设计
CRDS甲烷浓度测量系统搭载在系留球吊舱内,吊舱是一个密闭空间,外壳由保温材料制作,腔内温度通过风扇和舱内辅热装置调节,舱内温度保持在(22±5) ℃。通过2.3节中提到的第一个措施能够保证光腔内气体的温度与舱内温度接近,通过第二个措施可以补偿温度的小范围变化带来的测量误差。系留球平台为仪器提供蓄电池供电和无线数据传输,测量数据通过无线传输装置实时传回地面接收站,基于平台条件和测量需求,设计了图3所示的测量系统结构。
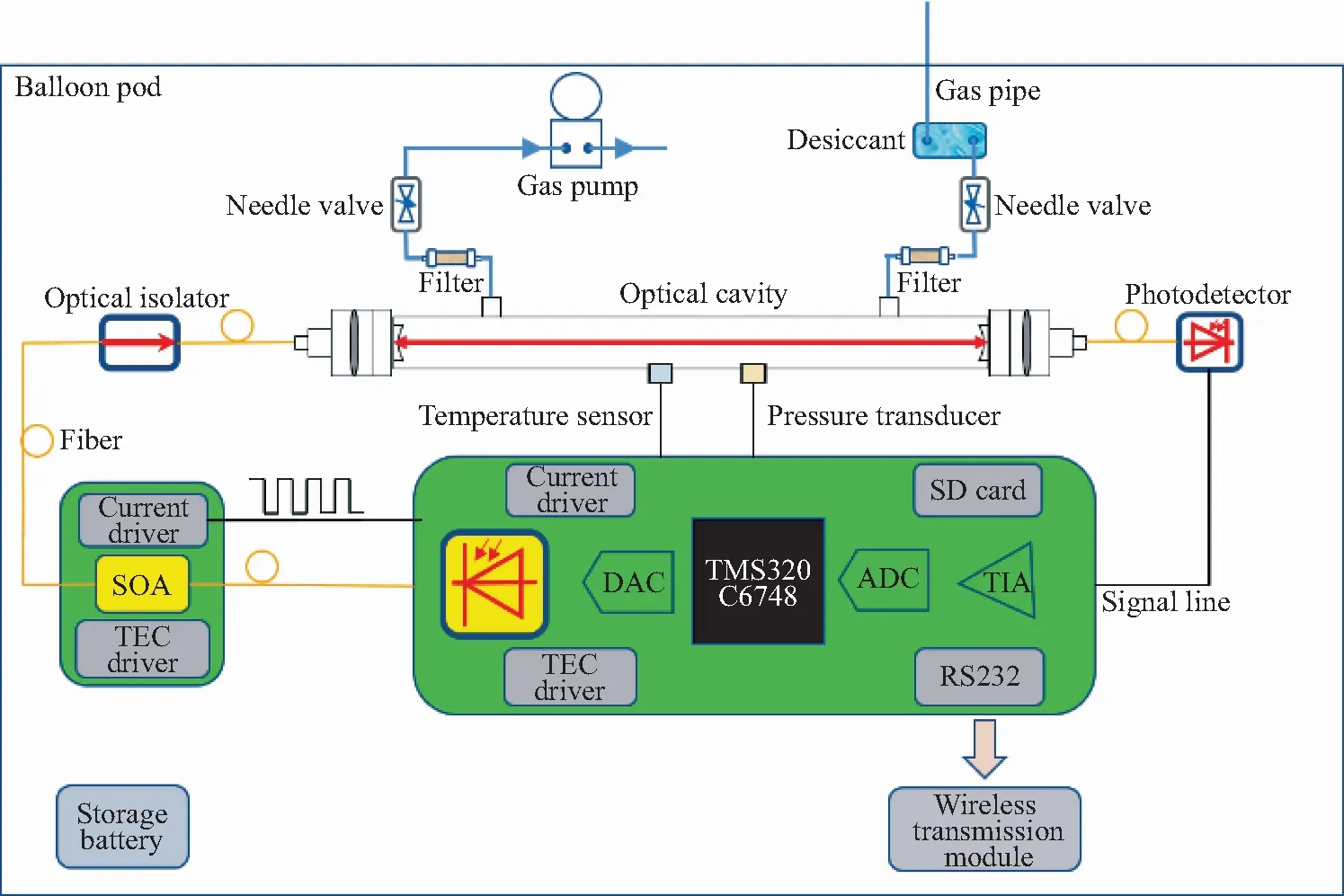
图3 球载CRDS测量系统功能结构框图
气泵抽取舱外新鲜气体经过硅胶干燥剂去除水汽后经过过滤器去除灰尘与杂质再进入测量光腔内,进气流速由进气口与出气口针阀控制。CRDS系统由光腔、主控电路、半导体光放大器(Semiconductor Optical Amplifier,SOA)(Thorlabs,BOA1082P)及其驱动电路、光纤光隔离器(FOPTO)和光电探测器(GPD,GAP1000FC)构成。光腔的长度为700 mm,纵模间隔为214.3 MHz,主控电路基于TI的DSP TMS320C6748设计,集成了DFB激光器(NEL,NLK1U5EAAA)及其TEC控制器和电流驱动器电路、衰荡信号形成电路、衰荡信号采集电路、SD卡、RS232等功能模块。CRDS技术中的光开关使用SOA实现,SOA与DFB半导体激光器类似,需要TEC控制器和电流驱动器电路,电流驱动器注入SOA 0 mA电流,SOA切断光路,注入500 mA电流,SOA闭合光路。光纤光隔离器是为了防止光腔的高反镜(LAYERTEC,110278)的反射光进入激光器引起激光器跳模。光电探测器将接收到的光信号转换成电流通过信号线连接到主控电路,由主控电路集成的跨导放大电路(TIA)和微弱信号调理电路进一步处理。主控电路扫描完每组光谱数据后,温度传感器(PT100)和压力传感器(ATM.1ST)采集腔内气体的温度与压力,然后进行光谱拟合和浓度计算,完成后将时间、压力、温度、浓度以及光谱原始数据存储到SD卡中,同时通过RS232模块发送时间、压力、温度和浓度数据。无线数据传输模块可以将RS232发送的数据转换成以太网帧数据并发送出去,地面通过无线接收设备实时接收仪器采集到的压力、温度和浓度等信息。图4是设计完成的测量样机,由12~24 V直流供电,功耗约为12 W,单次浓度测量时间约为12 s。
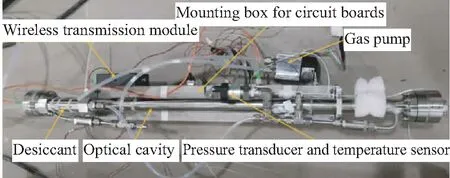
图4 CRDS测量样机实物图Fig.4 Photograph of assembled CRDS instrument
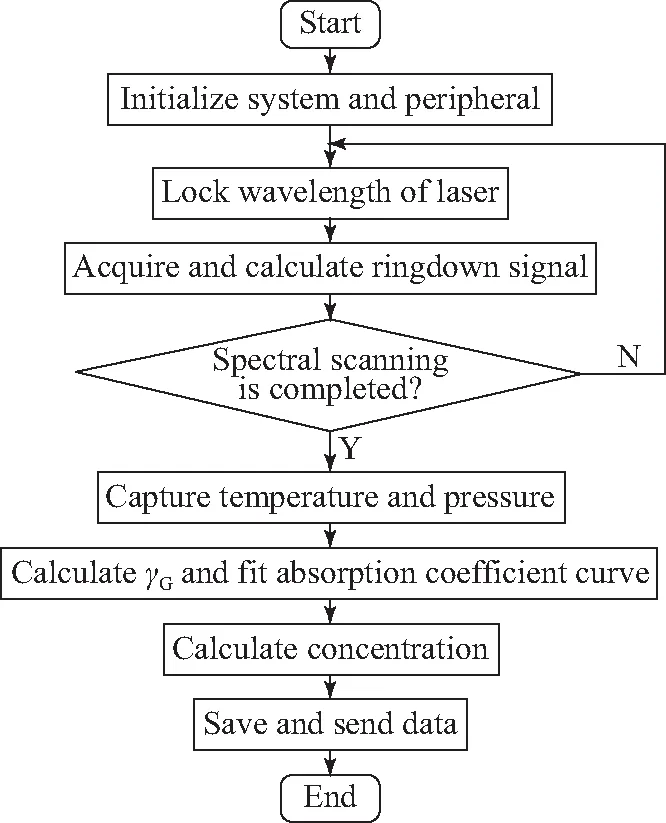
图5 CRDS系统测量程序流程Fig.5 Flow chart of measurement program of CRDS system
图5是主控芯片TMS320C6748的程序运行流程。仪器上电后,程序先初始化系统外设接口与电路参数,然后控制DAC微调激光器的输入偏置电流使得激光波长与光腔纵模发生共振,共振发生后立刻停止电流调节,此时与光腔纵模共振的激光波长对应的偏置电流被锁定,这个过程称为激光波长锁定。激光波长锁定后立刻使能SOA切断输入光并采集计算光腔的透射光强信号——衰荡信号,得到衰荡时间。重复激光的波长锁定与衰荡信号的采集与计算过程,依次完成待扫描光谱范围内所有光腔纵模的衰荡信号的采集与计算,这个过程称为光谱扫描。光谱扫描完成后采集腔内气体的温度与压力,计算高斯线宽并拟合衰荡时间计算的光谱吸收系数曲线,根据拟合得到光谱吸收系数曲线的积分面积A,并计算浓度值。最后存储与发送相关的测量与计算结果。
4 性能分析
仪器通过激光波长扫描实现与光腔纵模的共振。为了提高测量精度,每个纵模处锁定后,连续采集40次衰荡信号,将40个衰荡信号计算的40个衰荡时间的平均值作为该纵模处的衰荡时间。图6分别是仪器采集的单个衰荡信号和计算的光谱吸收曲线及两者的拟合曲线和残差。图6(a)中衰荡时间τRD为79.4 μs,拟合残差的RMS为1.470 mV,标准差σ为1.473 mV,信噪比达62 dB;图6(b)中的红色曲线是衰荡时间计算的光谱吸收曲线,根据 2.3节介绍的方法拟合光谱吸收曲线,蓝色曲线为拟合结果,拟合残差的标准差σ为0.002,并呈 “W”形状分布。 拟合残差的“W”形状是由于Vogit线型本身存在的误差导致[17]。
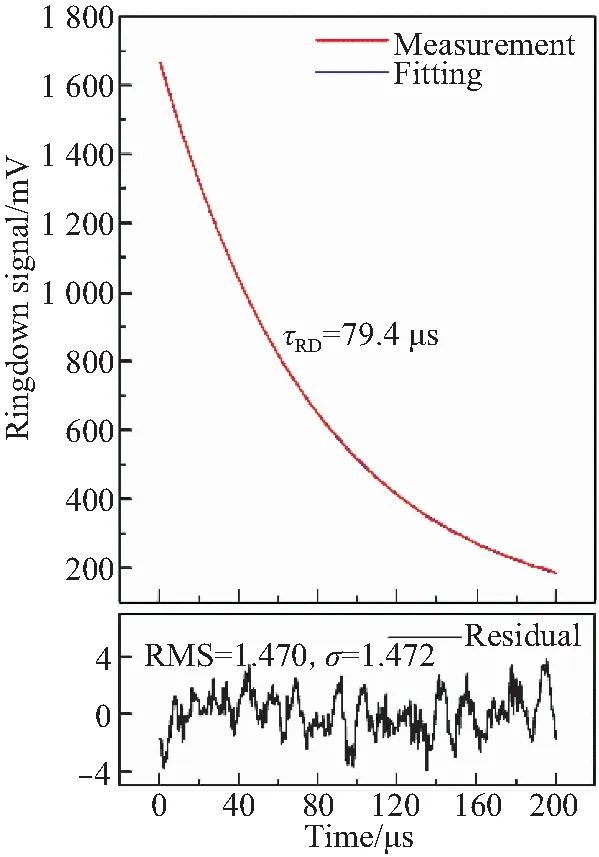
(a)衰荡信号及其拟合波形和拟合残差
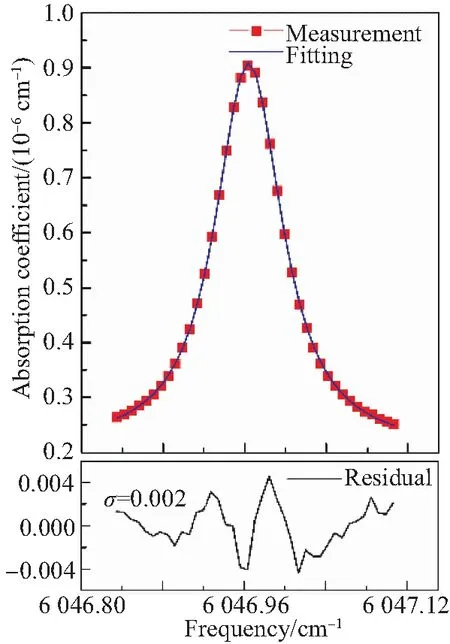
(b)光谱吸收曲线及其拟合波形和拟合残差
光腔长度、气体温度和气体压力等测量存在偏差,因此实际测量结果需要标准气体标定。本文使用浓度分别为1.5×10-6,2.3×10-6,2.7×10-6,3.0×10-6、精度为5%的标准气体对仪器测量结果进行标定,图7(a)是4组标准气体的测量结果,图中表格分别给出了4组测量值的RMS和方差,方差最大为2.2×10-9。图7(b)中给出了标准气体标称值与测量值RMS之间的线性关系,校正可决系数为0.998 7,拟合系数在图7(b)中表格给出,实际浓度由测量浓度和拟合系数确定。
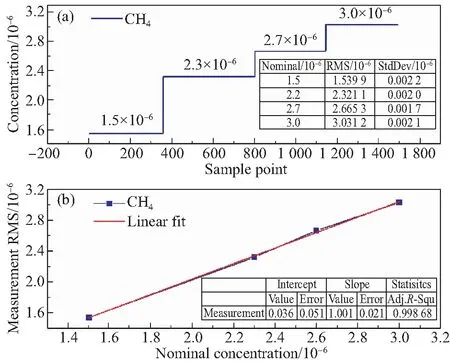
图7 标气测量结果及标称值与测量值的线性分析
5 试验与结果
仪器参加了2019年4月28日至29日在西藏鲁朗地区进行的第二次青藏高原综合科考系留球试验,仪器性能得到了实际测试与验证。鲁朗地区地面海拔约为3 340 m,气球在北京时间4月28日23:47开始上升,4月29日03:36上升到最高点——海拔6 000 m,4月29日06:31回到地面。图8是试验现场照片,仪器搭载在气球吊舱内。
仪器在气球上升前30 min上电,上电后仪器自动运行。仪器扫描一组光谱数据需要约12 s,每扫描一组光谱信号采集一次腔内气体温度与压力,计算出浓度值后将光谱原始数据、时间、温度、压力以及浓度值在SD卡中存储,另外发送时间、温度、压力和浓度数据到地面接收站。

图8 第二次青藏高原综合科考鲁朗系留球试验
光谱线型Vogit函数是洛伦兹线型函数和高斯线型函数的卷积,Vogit线型函数中的洛伦兹成分是由分子之间的碰撞展宽引起的,是压力的函数。洛伦兹函数的线宽与压力的关系为:
ΔυL=2P[XCH4γself+(1-XCH4)γenv],
(11)
其中:P为总压,XCH4为甲烷浓度,γself与γenv分别为自碰撞加宽系数与环境碰撞加宽系数,由表1给出。大气中的甲烷浓度很低,式(11)中右边括号中的第一项远小于第二项,式(11)可以简化为:
ΔυL≈2Pγenv.
(12)
所以,气压越低,光谱线宽越小。
仪器在气球上升与下降过程中一直正常工作,图9展示了存储在SD卡中的典型高度的几组光谱数据样本,因为采集的是离散的光谱数据,为了更方便地比较不同海拔高度光谱线宽的变化,将存储在SD卡中的原始光谱数据进行了样条插值处理。图9(a)是上升过程中不同高度的5组光谱数据,随着高度的上升,光谱线宽减小;图9(b)是下降过程中不同高度的5组光谱数据,随着高度的下降,光谱线宽增大。其中最低点海拔3 340 m时,光谱的洛伦兹线宽为0.074 cm-1,最高点海拔6 000 m光谱的洛伦兹线宽为0.056 cm-1。
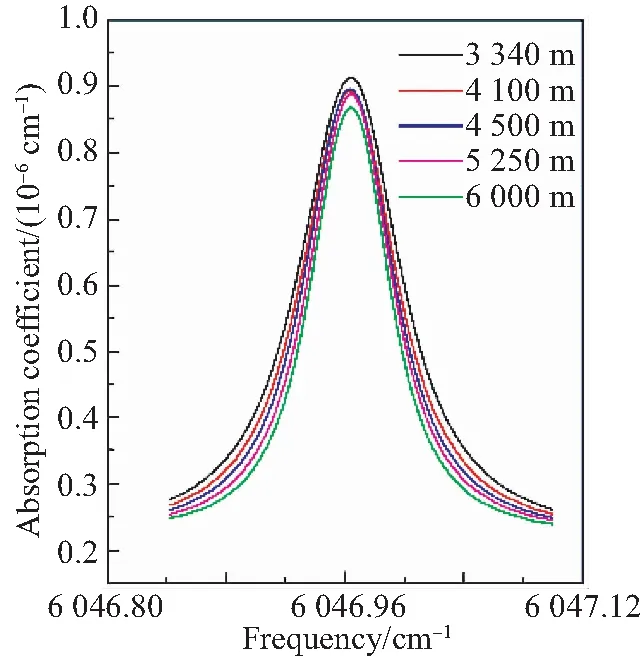
(a)气球上升过程不同高度的光谱数据
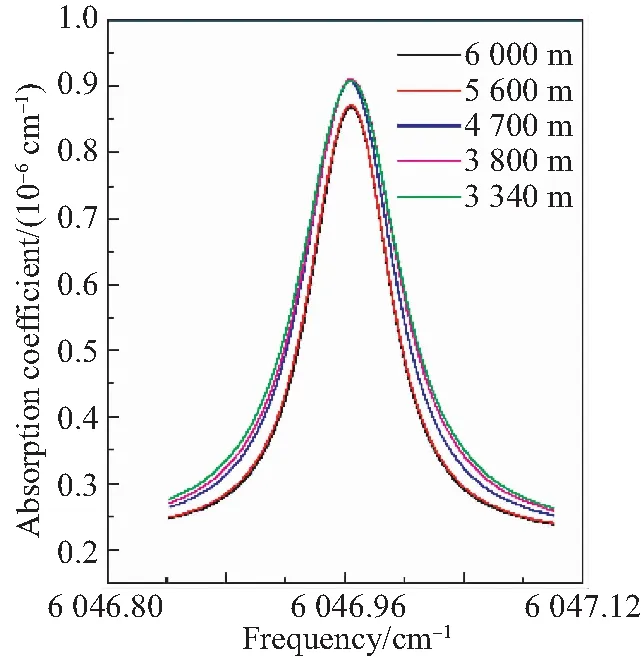
(b)气球下降过程不同高度的光谱数据
在上述上升与下降过程的各5组光谱原始数据分别选取了一组进行了拟合分析,分析结果如图10所示。图10(a)是气球上升到海拔5 250 m的光谱原始数据,此时腔内气压为0.46×105Pa,温度为22.4 ℃,计算的浓度值为1.919×10-6;图10(b)是气球下降到海拔5 600 m处的光谱原始数据,此时腔内压力为0.44×105Pa,温度为20.6 ℃,计算的浓度值为1.884×10-6。

(a)上升过程中海拔5 250 m处的光谱原始数据
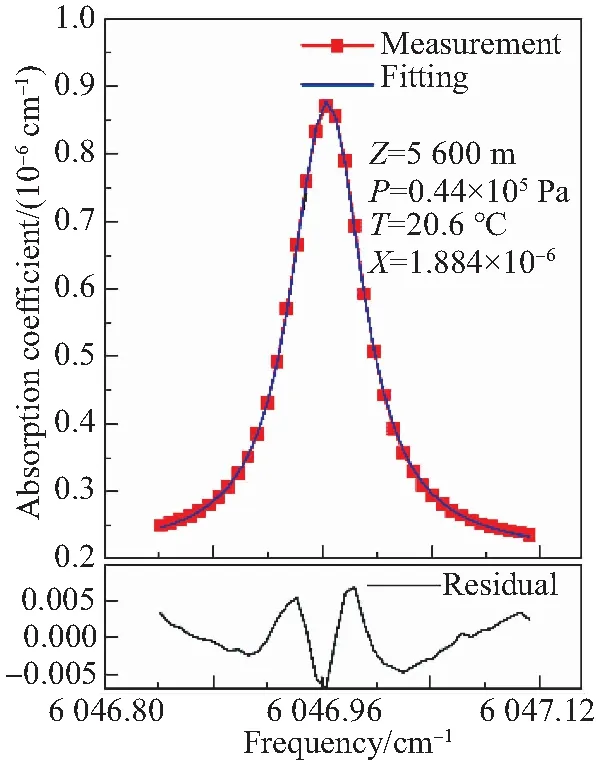
(b)下降过程中海拔5 600 m处的光谱原始数据
此次试验测量了鲁朗地区近地表面约2 700 m垂直高度的大气甲烷浓度。图11(a)与图11(b)分别对应气球上升和下降过程不同高度的甲烷浓度测量值,整个测量过程中浓度在1.88×10-6~1.96×10-6内,最大变化约为80×10-9,两次测量中不同高度甲烷浓度也不具有明显的一致性。近地表面的大气对流复杂多变,在气球上升与下降过程中,大气的温度、风向以及湿度都已发生较大变化,风向的转变使得测量点的甲烷来源可能发生变化,不同高度大气之间的频繁对流则减小了不同高度的甲烷浓度差异。
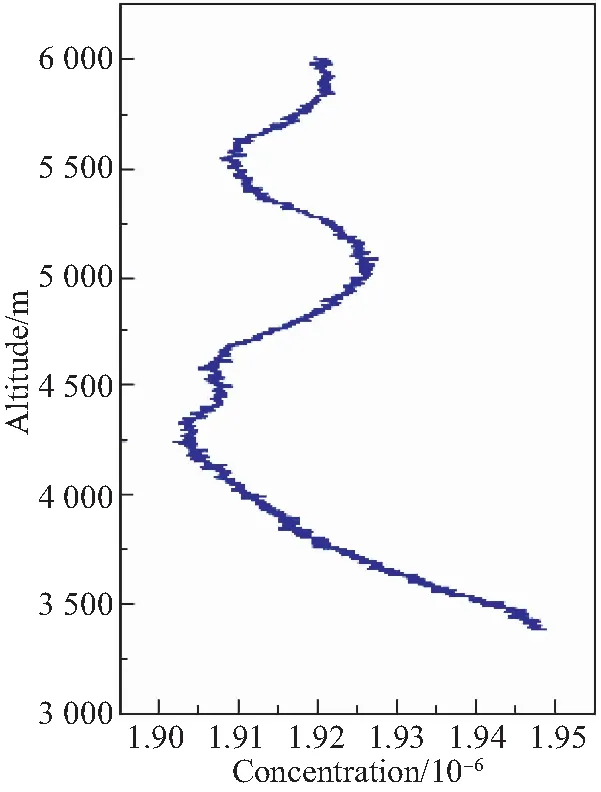
(a)气球上升过程甲烷测量数据
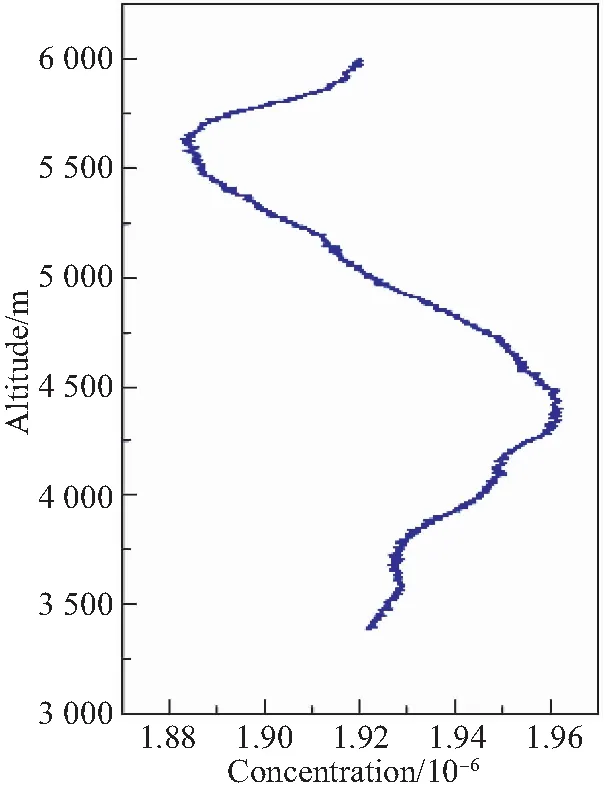
(b)气球下降过程甲烷测量数据
6 结 论
本文利用基于DSP TMS320C6748设计的数据处理系统实现球载高灵敏度甲烷测量系统的设计与应用。测量系统基于高灵敏度的吸收光谱技术CRDS设计,选择甲烷位于6 046.95 cm-1处的吸收谱线作为目标测量谱线。针对不同海拔高度温度和压力的大范围变化,系统集成了腔内气体温度和压力的测量装置,并且通过测量温度计算高斯线宽使得浓度计算结果得到明显优化。集成后系统采集到的衰荡信号信噪比达62 dB,测量的光谱拟合残差RMS为0.002。在实验室通过4种浓度的标准气体对系统测量结果进行了分析,测量值RMS与标准气体标称值校正可决系数为0.998 7,4种浓度测量值的标准差最大为2.2×10-9,即系统的1σ检测线为2.2×10-9。集成后的测量系统功耗为12 W,光谱扫描时间即单个浓度的测量时间约为12 s。
测量系统搭载在系留球平台成功参加了第二次青藏高原综合科考西藏鲁朗系留球试验,实验中,仪器成功测量了从地面海拔3 340 m到海拔6 000 m气球上升和下降过程中大气的甲烷浓度,并完整记录了整个过程的光谱数据。光谱的吸收线强与温度有关,由于不同海拔处温度的大范围变化,本文通过加长进气管道和减小进气流速使得具有保温功能的气球吊舱加热进入测量腔室的待测空气,同时测量进入腔内气体的温度,测量结果表明进到测量腔内的气体温度已经接近舱温。但是由于进气流速较慢,导致仪器对浓度变化的响应时间增大,另外测量腔内气体温度的不均匀性会导致仪器测量精度的降低。因此,为了进一步提高仪器的响应时间和检测精度需要增加预热装置预热进气温度和对腔体控温[18-20]。
该仪器通过改变激光波长匹配光腔的纵模实现共振,低压时光谱展宽较小,为了在光谱吸收范围内采集足够的点数完成光谱线型拟合,需要减小腔的纵模间隔进而导致光腔腔长变长,而因此使仪器体积成倍增加,腔内体积的增加也会增长对浓度变化的响应时间。因此,为了扩展仪器的使用范围和提高仪器性能,下一步需要改变激光与腔的共振实现方式,即改变光腔腔长度匹配激光波长实现共振。
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
印制电路信息(2022年6期)2022-08-03 05:33:18
科技与创新(2022年11期)2022-06-13 07:54:42
军民两用技术与产品(2021年10期)2021-03-16 06:05:08
水上消防(2020年1期)2020-07-24 09:26:02
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
世界地质(2019年2期)2019-02-18 07:10:08
疯狂英语·新读写(2018年3期)2018-11-29 22:37:11
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:36
自动化与仪表(2014年10期)2014-02-26 08:21:23
