多智能体系追踪一致性研究
2020-10-14 01:07王正通
长春工业大学学报 2020年4期
李 双, 尤 文, 曲 娜, 王正通
(长春工业大学 电气与电子工程学院, 吉林 长春 130012)
0 引 言
智能体目前没有一个被大家广泛接受的准确定义,从它的特性出发智能体分强、弱定义。从智能体特性角度说明弱定义是有自主性、社会性、反应性及预动性特性的实体,在强定义中,智能体在弱定义基础上还增加了人的特性。多智能体系统包含多个智能体,智能体间存在逻辑关系,可以进行双向、单向的传递状态信息,集体共同完成一个智能体无法解决的问题。
由于个体能力的有限性对整体问题的解决不能产生很好的效果这一问题,人类受自然界启发,在自然界中发现简单个体,利用简单的规则产生奇妙的现象[1]。比如昆虫和动物无领导的迁移现象、大雁有组织的飞行、沙丁鱼聚集成一团抵御攻击、蚂蚁觅食现象等,多个有限的个体共同协作解决复杂的问题,此现象引起科学家注意,希望能够运用到各种生活领域中,如无人机编队、水下自主航行装置[2]、运输网络、传感器网络、电力系统、通信系统、医疗等方面,对于科技和经济的发展产生重要意义,对人们生活产生重要影响。且智能体具有自治性、协作能力、通讯能力等特点,以及多智能体系统功能性强、鲁棒性好、灵活性高的优势。一致性理论已在电力系统中得到越来越多的应用[3]。
一致性问题主要是设计一个一致性算法,它能保证系统中所有智能体的状态最终趋于一致[4]。通过设计智能体局部之间的通信法则,使所有智能体的状态或输出信息最终趋于共同的值[5]。一致性包含有领导跟随的一致性研究和虚拟领导的一致性研究[6]。对于领导者、跟随者的问题也是追踪问题,也就是控制协议令所有跟随者的状态与领导者的状态一致。领导者不需要考虑网络中全部智能体的状态,只需要将信息传递给一部分智能体。虚拟领导也是无领导的一致性问题,也需要控制协议,令全部智能体信息状态趋于一个平衡值,但是这个平衡值不能提前设定,并且与全部智能体的初始状态有关。目前多智能体已经渗透到很多行业领域,为使微网内部功率平衡实时调节控制,采取协调控制的方法合理对分布式电源出力调节[7]。提出一种利用多智能体系统研究配电系统管理的方法,模拟配电系统的特性[8]。文中主要研究领导跟随一致性。
1 相关问题描述
多智能体系统中通信网络用图G(V,e,A)表示,V={v1,v2,…,vi,…,vn}为节点集,i={1,2,…,n},n为节点总数,(vi,vj)∈e构成边集,表示从智能体vj向vi传递信息,A=(aij)表示加权邻接矩阵,aij表示从vi指向到vj的连接权值,用bi表示多智能体与领导者间的权值,当领导者与跟随者之间存在通信时,bi>0,vi节点总数称为入度,从vi发出的总数称为出度,vi能够接收邻居节点的信息,同时将自己的信息传递给其邻居节点。L是图G的Laplacian矩阵L=D-A,D是图G的度矩阵。取
(1)
设领导者动态模型为
(2)
一阶智能体动力学描述为
(3)
式中:x0----领导者状态信息;
ui----控制输入。
2 一致性控制协议
使用一致性协议为

(4)
式中:Ni----节点邻居节点的集合;
D1=xj(k)-xi(k);
D2=x0(k)-xi(k)。
定义当t→时,有
则领导跟随智能体系统趋于一致。
“大信不约,好校长何止十百,大爱无疆,好老师何止百千,大成不反,好学生何止千万,大道不违,好学校就在此间。”这是屈哨兵局长在《广州教育赋》中的话,但绝非诗意的虚言。随着“好教育进行时”现场报告会对于广州好教育的展示、“教育热点面对面”电视节目对广州好教育的讨论、“媒体探营”小组深入“家门口的好学校”进行采访,随着向全社会征集好教育的标准,由全社会评选家门口的好学校,不知不觉间,好学校、好校长、好教师、好学生、好的教育生态这些广州教育发展的关键词已经挂在老百姓的嘴边。
3 一致性分析
令
ηi=xi-x0,
所以当t→时,有
多智能体系统达到一致。
令
η=[η1,η2,…,ηn]T,
所以有
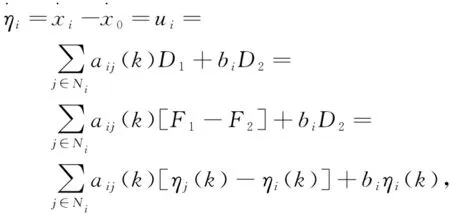
(5)
式中:F1=xj(k)-x0(k);
F2=xi(k)-x0(k)。
矩阵形式表示为
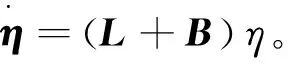
(6)
故当式(6)稳定时,系统实现一致,也即-(L+B)特征值在复平面左半平面时系统稳定。
4 仿真验证
为验证多智能体领导跟随一致性,给出了一个领导者、三个跟随者,假设多智能体系统的网络拓扑图G如图1所示。
图中,标号为0的为领导者,其余三个为跟随者,智能体之间的通信用线连接,智能体间的权值为1。
系统无向拓扑结构的邻接矩阵A为
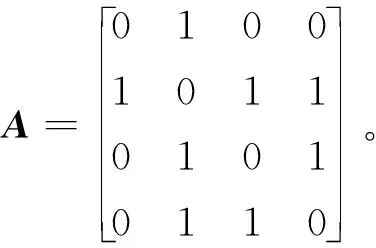
(7)
根据图1可以得到跟随者拉普拉斯变换矩阵L,并求出相应的B。
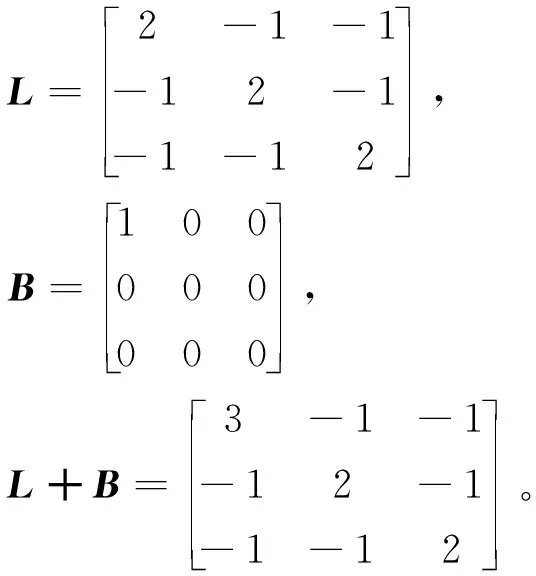
(8)
根据以上信息,当初值为x1=105,x2=85,x3=105,x0=0时,用MATLAB进行仿真,仿真结果如图2所示。
5 结 语
在多智能体系统中,智能体之间相互通信,并在一致性协议下,经过一定时间,跟随者最终会与领导者保持一致,达到追踪一致性。
猜你喜欢
辽宁教育(2022年19期)2022-11-18
数字海洋与水下攻防(2022年4期)2022-09-01
汽车实用技术(2022年9期)2022-05-20
中国医院院长(2022年5期)2022-04-09
疯狂英语·新悦读(2021年1期)2021-01-27
领导文萃(2018年17期)2018-10-30
中国广播(2017年9期)2017-09-30
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”
当代贵州(2017年24期)2017-06-15
诗潮(2017年5期)2017-06-01
燕山大学学报(2015年4期)2015-12-25