
基于分布式光纤传感的油气管道挖掘事件判断方法
2020-05-14 03:16:16庞洪晨孙奇北
石油工程建设 2020年2期
庞洪晨,范 锋,孙奇北,乔 实
山东省天然气管道有限责任公司,山东济南 250101
绝大多数天然气管道地处野外,管道跨度长且周围环境十分复杂。当管道在运行过程中发生较严重的破坏时,将造成巨大的经济损失,并可能威胁到人民群众的生命和财产安全,且对当地环境会造成严重污染[1-2]。因此,有必要对天然气管道进行实时监测,以最大程度地降低由于管道破坏和泄漏造成的危险。目前,依靠与管道同沟铺设的通信光缆对管道进行实时监控是最先进并切实可行的监测手段[3-4],光纤传感技术自诞生时起,就以其可靠性高、无源监测信号远等特点而广泛应用于恶劣环境下重大基础设施的监测领域。近几年,国内外相关技术产品发展迅速并且已开始实际应用[5-7]。在铺设天然气管道时都伴随着通信光缆的铺设,在此基础上,可以直接用已经铺设好的通信光缆作为传感单元搭建分布式光纤预警平台,并进行监测。利用管道光纤系统可以有效监测到天然气管道破坏等情况,并提前预警和精准定位。
本实验采用分布式光纤预警技术来实现天然气管道受到外部入侵的实时监测。
1 挖掘振动信号判断
对于每个探测单元采集到的一维时域信号,其中的挖掘信号通常表现为规律性的冲击波形[8-13]。
1.1 计算方式
(1)对原始数据进行逐点差分计算,得到差分数据序列。通过差分计算,可以滤除信号中低频漂移的干扰,并且提高检测信号的信噪比。其计算公式如下:

式中:x0,…,xn表示距离为nh的节点;h为节点的步长;f(xk)、f(xk+1) 表示各节点所对应的函数值。
(2)使用距离长度为T的窗口,在经过差分后的数据序列上滑动,对窗口内的数据取绝对值后,找到最大值。通过这一步计算,可以得到振动信号的近似包络,其效果如图1所示。

图1 时域原始数据和包络提取
(3)对上一步得到的数据序列,作寻峰计算。采用逐级扫描方式,扫描的依据是斜率的变化,其好处是绝对值比较,可以避免极值在平滑处的影响,具体计算方式为:
第一,将近似包络序列表示为X=[X1,X2,…,Xn],计算近似包络序列的一阶差分向量DiffX,DiffX=X(i+1)-X(i),其中,i∈1,2,…,n-1。
第二,对差分向量Diff X进行取符号函数运算,Trend=sign(Diff X),即遍历Diff X,如果Diff X (i) 大于0,则取1;如果小于0,则取-1,否则,则置为0。
第三,从尾部遍历Trend向量进行操作:if Trend(i) =0且 Trend(i+1) ≥0,则 Trend(i) =1;if Trend(i) =0且Trend(i+1) <0,则 Trend(i) =-1。
第四,对Trend向量进行一阶差分运算,得到R=diff(Trend)。
第五,遍历得到的差分向量R,如果R(i) =-2,则i+1为投影向量X的一个峰值位,对应的峰值为X(i+1);如果R(i) =2,则i+1为投影向量X的一个波谷位,对应的波谷为X(i+1)。
将相邻的并且时间间隔小于0.1s的峰合并到一次冲击信号中。通过这一步计算,可以将每次冲击信号提取出来,并可以得到每个冲击信号出现的时刻,以及每个冲击信号的时间宽度。统计相邻冲击信号之间的时间间隔和每个冲击信号持续的时间宽度,以及1min内出现的符合挖掘规律的冲击信号次数。
(4)挖掘信号判断。当一次冲击信号满足条件:与前一次冲击间隔>0.7 s且本次冲击时间宽度<1.5 s,则认为此次冲击信号符合挖掘规律。若检测到某个探测单元1 min内出现的符合挖掘规律的冲击次数>5次且<60次,则开始对这个探测单元所在的一段区域作进一步分析,以区分人工挖掘和机械挖掘行为。
1.2 计算效果
(1)选取一段人工挖掘测试过程中采集的时长120 s的数据样本,其中第3~13 s为车辆经过信号,第30~115 s为人工挖掘信号。图2所示的为此段信号的原始数据和近似包络的计算结果,从中判断出符合挖掘条件的冲击信号58次,出现在第30~115 s之间。算法可以有效抑制车辆经过引起的误报,同时准确判断人工挖掘信号。
(2)选取一段机械挖掘测试过程中采集的时长120 s的数据样本,其中,第25 s开始为机械挖掘信号。图3所示为此段信号的原始数据和近似包络计算结果,从中判断出符合挖掘条件的冲击信号24次,出现在第25~120 s之间。算法可以准确判断机械挖掘信号。
2 结合图像处理的事件判断
对于判断出挖掘信号的区域,可以结合图像处理算法,通过对挖掘信号的影响范围和背景信号波动来对挖掘事件类别进行判断[14]。
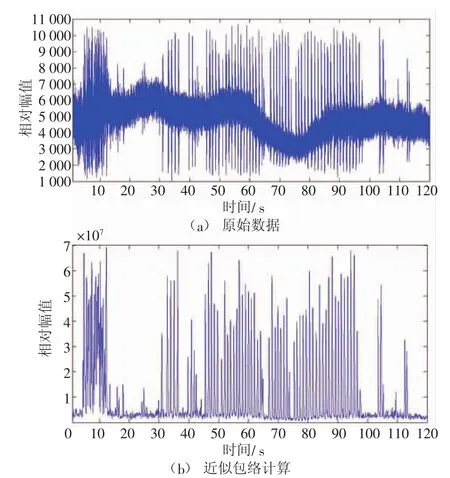
图2 人工挖掘时域原始数据和近似包络计算
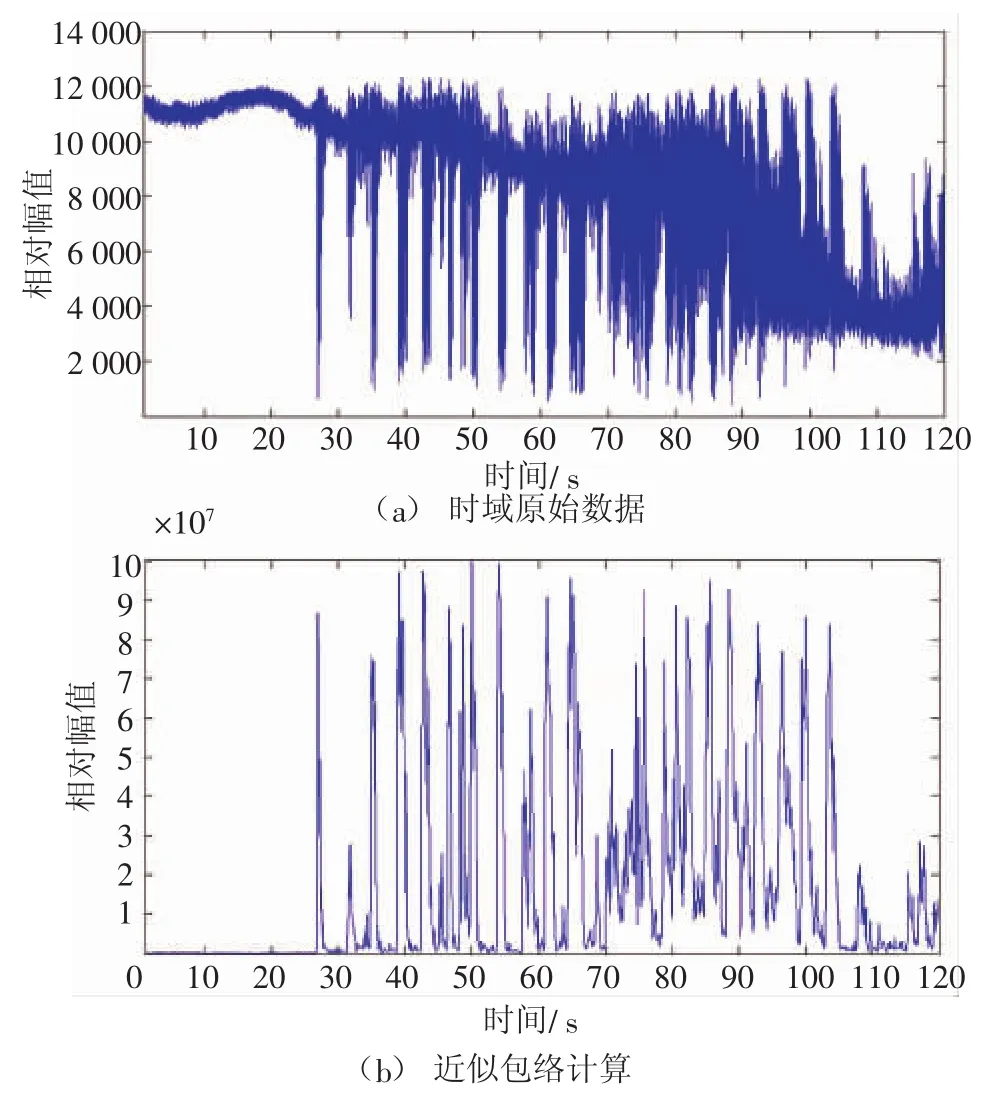
图3 机械挖掘时域原始数据和近似包络计算
2.1 计算方式
(1) 采用最大类间方差法[15-17],对二维挖掘信号进行提取,具体计算方式为:
其一,将二维挖掘信号的数值映射到L个灰度级 [0,2,…,L-1],记灰度级为i的像素点的个数为N(i),那么总的像素点个数就应该为N=N0+N1+…+N(L-1),灰度值为i的点的概率为P(i)=N(i)/N。
其二,门限t将整个信号矩阵分为暗区c1和亮区c2两类,则类间方差σ是t的函数:σ=a1×a2(u1-u2)2,式中:aj为类cj的面积与图象总面积之比,a1=sum(P(i)),a2=1-a1;uj为类cj的均值,u1=sum (i× P(i)) /a1,u2=sum (i× P (i)) /a2。
其三,令门限t遍历 [0,2,…,L-1],选择最佳门限t使类间方差最大,即:令Δu=u1-u2,σb=max{a1(t)×a2(t)×Δu2}。
其四,根据得到的最佳门限t^,将二维挖掘信号分离为前景部分和背景部分(此时二维挖掘信号的数值已经映射到L个灰度级 [0,2,…,L-1])。
(2)对于分离出来的前景信号,统计每个事件区域的空间(横轴)涵盖距离[15-17],得到挖掘信号的影响范围,即统计前景部分左边界和右边界之间涵盖的像素点个数N,每个像素点在横轴上,即代表一个光纤链路中的监测单元,当监测分辨率为10 m,即每个光纤监测单元对应10 m的长度,则此挖掘信号的影响范围是N×10 m。
(3)对于分离出来的背景信号,计算每个事件区域的灰度共生矩阵。取图像中任意一点(x,y) 及偏离它的另一点(x+a,y+b),设该点对应的灰度值为(g1,g2)。令点(x,y) 在整个画面上移动,则得到各种(g1,g2)值。对于整个画面,统计出每一种(g1,g2)值出现的次数,然后排列成一个方阵,再用(g1,g2)出现的总次数将它们归一化为出现的概率P(g1,g2),这个方阵即为灰度共生矩阵。(a,b) 取值选取(1,0)、(0,1)、 (1,1)、(-1,-1),分别对应 0°、90°、45°、135°扫描。
再计算灰度共生矩阵的熵,熵是图像所具有的信息量的度量,是一个随机性的度量,当共生矩阵中所有元素有最大的随机性,空间共生矩阵中所有值几乎相等,共生矩阵中元素为分散分布时,熵较大,它表示了图像中纹理的非均匀程度或复杂程度[18-20]。其计算方式为:

式中:G(i,j)表示位置坐标为(i,j) 的灰度值。
(4)若挖掘信号影响范围>50 m,并且灰度共生矩阵的熵>10,则挖掘事件判断为机械挖掘;否则,判断为人工挖掘。
2.2 计算效果
图4所示的为上一节中人工挖掘区域的原始数据和挖掘信号提取结果。计算得到挖掘振动影响范围为10 m,背景区域的熵值为3.6。此段信号判断为人工挖掘,符合实际。
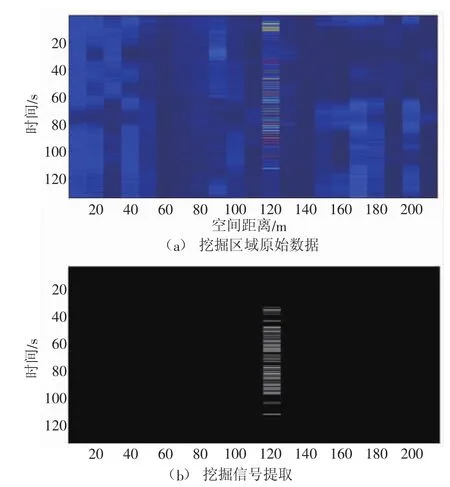
图4 人工挖掘区域原始数据和挖掘信号提取
图5所示的为上一节中机械挖掘区域的原始数据和挖掘信号提取结果。计算得到挖掘振动影响范围为150 m,背景区域的熵值为62.5。此段信号判断为机械挖掘,符合实际。
3 测试统计和结论
某段天然气管道总长度约为170 km,共经过7个场站,被划分为6个监测区段,利用4台管道光纤监测主机,使用与管道同沟敷设的通讯光缆中的1芯光纤作为传感器,搭建管道光纤监测系统,系统布置见图6。
在管道沿线多个位置进行人工挖掘和机械挖掘测试,人工挖掘使用铁锹在管道上方进行挖掘,开挖面积不大于1 m×1 m,深度不大于0.5 m;机械挖掘使用中型挖掘机在垂直管道20 m处进行挖掘,连续挖掘时间不超过30 s。现场测试挖掘如图7所示,现场测试数据波形如图8所示;测试统计结果如表1、表2所示。
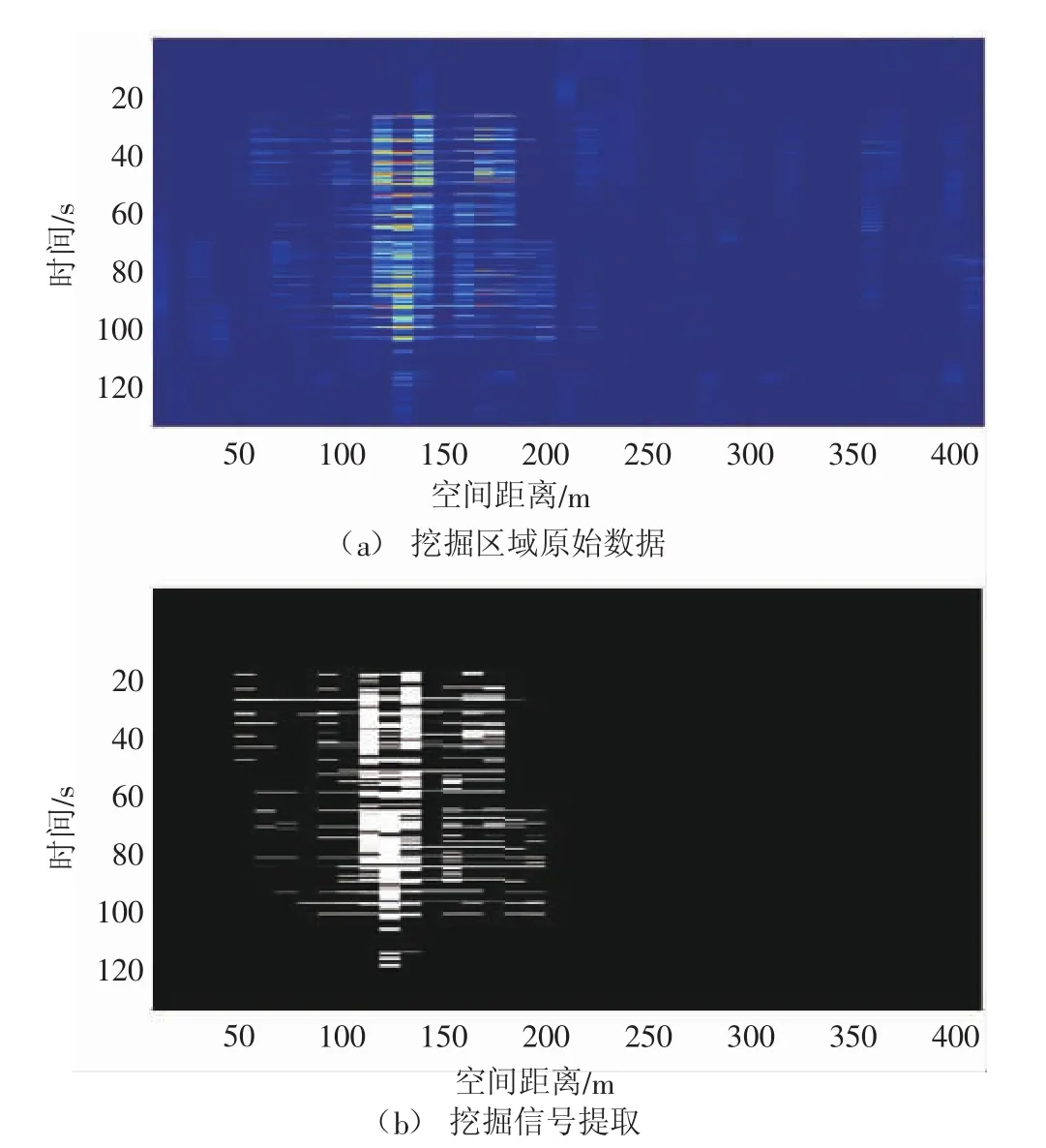
图5 机械挖掘区域原始数据和挖掘信号提取
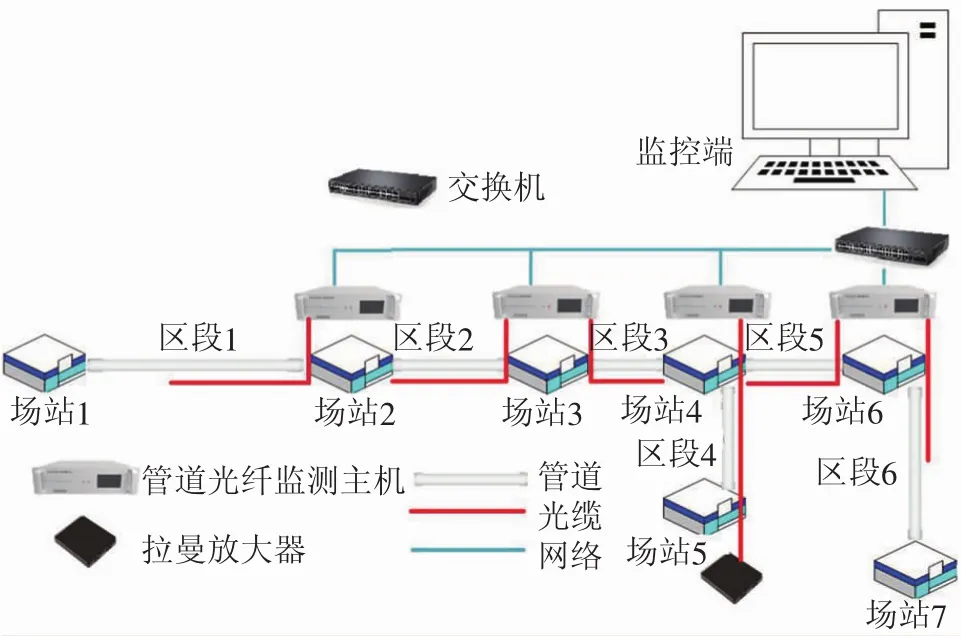
图6 管道光纤监测系统布置示意

图7 测试挖掘现场
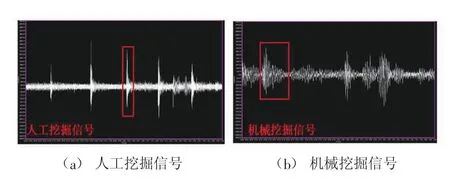
图8 数据波形图

表1 人工挖掘测试统计结果
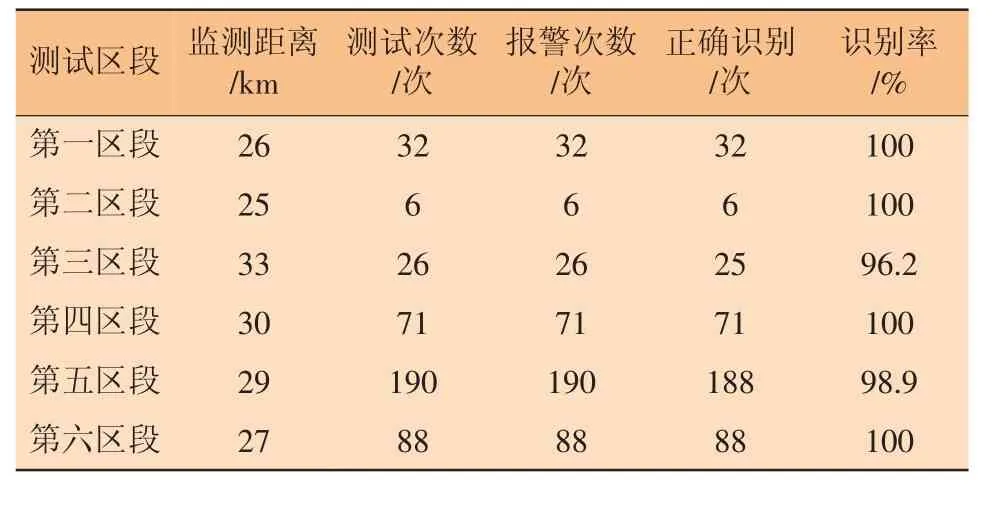
表2 机械挖掘测试统计结果
由以上测试统计结果可知,该方法的挖掘识别准确率可达到96.2%以上。将一维时域信号分析与二维区域图像处理相结合,则可以在抑制车辆经过引起误报的同时,对挖掘信号进行准确判断和有效识别。
4 结束语
本文介绍了基于相干瑞利散射的分布式光纤传感技术,利用与管道同沟敷设的通信光缆作为振动传感器,对油气管道挖掘破坏事件进行判断的方法。其判断原理为:首先对每个探测单元采集的时域信号进行挖掘事件判断,再利用图像处理算法对判断有挖掘事件的区域进行时间-空间维度上的分析,从而达到识别挖掘事件类别的目的。现场实验结果表明,该判断方法能有效探测挖掘事件,挖掘识别准确率可达到96.2%以上。
猜你喜欢
China Report Asean(2022年8期)2022-09-02 05:31:26
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
高技术通讯(2021年3期)2021-06-09 06:57:48
物联网技术(2020年12期)2021-01-27 03:34:08
汽车零部件(2017年4期)2017-07-12 17:05:53
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
信息安全研究(2015年3期)2015-02-28 20:17:57
太空探索(2014年1期)2014-07-10 13:41:50
