
基于汇博机器人的法兰抓取控制设计*
2020-04-05 13:22时自鸣曹泽新毕建迪王绪伟汤小伟
科技创新与生产力 2020年2期
时自鸣,曹泽新,毕建迪,王绪伟,汤小伟
(扬州工业职业技术学院,江苏 扬州 225127)
1 汇博机器人整体设计介绍
工业机器手的作用就是通过西门子S7-1200 PLC的远程控制和通信以及视觉信息采集系统所辨别的工件信息来实现对工件的搬运、组装和拆解。
本研究通过西门子PLC S7-1200的控制系统及工业以太网对汇博机器人进行远程控制,控制分为4步:机器人运行、机器人暂停、机器人停止、机器人复位 (步骤不分先后),最终通过PLC对机器人的远程控制来实现机器人手臂的多维运动运行。机器人的多维运动方式是通过汇博机器人自带的KEBA操作系统以及示教器终端来实现4个工件的组装和拆解运动。
1.1 机器人型号的选用
本研究所选用的机器人为汇博HR20-1700-C10机器人,它的最大负载为20 kg,最大展开半径为1 722 mm,具有操作空间大,操作灵活等特点。本系统选用的是KEBA系统控制器。
1.2 PLC控制系统的选用
本研究选用的是西门子PLC S7-1200控制器,选用它的原因在于其具有安装简便、节省空间、可拓展性强、灵活度高等优点。
1.3 视觉信息采集系统的选用
本设计的视觉信息采集系统选用信捷公司的X-sight机器人视觉信息采集系统,本相机为智能一体化相机,通过内含的CCD/CMOS传感器采集高质量现场图像,其相机内嵌数字图像处理 (DSP)芯片,能脱离PC机对图像进行运算处理,PLC在接收到相机的图像处理结果后能进行动作输出。
本设计辨别工件主要使用信捷公司的X-sight机器人视觉系统中的圆环定位工具,通过圆环定位工具来测量相机的底座直径,且底座相机系数=(底座实际直径 (mm)/相机内直径像素值)×10。然后将输出的结果输入到触摸屏第一个相机系数中。本设计的工件都是通过此方法来计算相机系数,并把相机系数输入到主控屏幕中的。
2 机器手控制方案的设计
2.1 PLC的控制方式
通过编写主程序和子程序并使用主程序调用子程序的方法来控制机器人的运动和停止[1]。子程序模块分为3种:机器人运行、机器人停止、机器人报警(复位)。第66页图1为PLC程序整体逻辑图。
2.2 机器手的动作流程及其相关通信控制流程
1)机器人的动作流程。本设计的机器人动作流程通过带有KEBA系统的示教器对整体流程进行编写。其编写逻辑如下:通过KEBA示教器中机器人运动指令 (PTP,Lin,LinRel等)以及相关变量对一号工件吸取以及对二号工件抓取进行设计,通过示教器中的变量检测来控制机器手上的吸盘和夹爪,机器人的运动过程通过示教器的手动模式即手动操纵机器人进行位姿的定点来实现。本设计采用的运动逻辑首先通过示教器在手动模式下进行位姿定位,其次通过编写线性运动指令 (Lin)对之前所确定机器人的位姿点进行次序连接,最后通过新建吸盘和夹爪的气泵开关变量让机器人在合适的时机快速打开或者关闭吸盘和夹爪,进而实现对特定工件的抓取和组合。在对一号工件和二号工件进行抓取动作时需要依据已建立好的工具坐标系来进行数据的更改,以实现机器手工具的切换[2-3]。
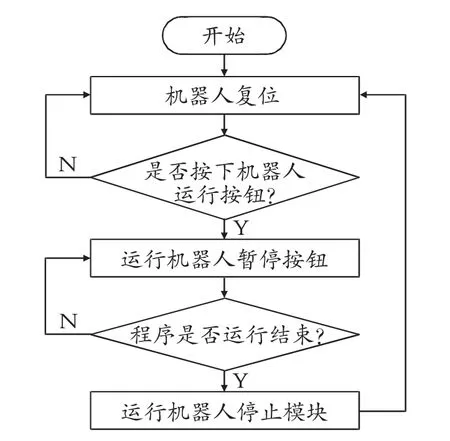
图1 PLC程序逻辑图
2)工件识别和抓取及相关通信控制流程。本设计中机器人对工件的识别是通过PLC、机器手、视觉信息采集系统三者之间的通信来实现,而三者之间使用的具体协议为Modbus/TCP通信协议,具体的智能相机与PLC的通信流程见图2。具体流程:视觉信息采集系统首先判别工件的类型,其次把相机读取到的信息以数据包的形式通过PLC发送给机器手,最后机器手收到数据块之后对一号工件和二号工件采取特定的抓取动作,机器手KEBA示教器抓取工件的部分示例程序如下。
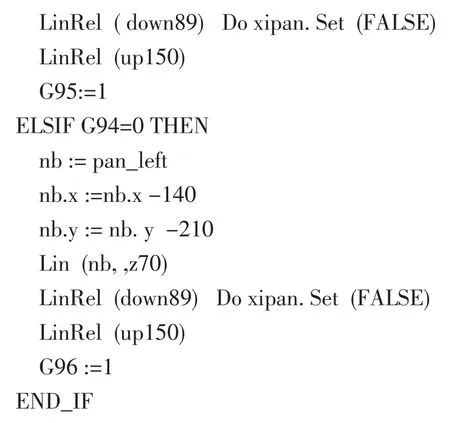
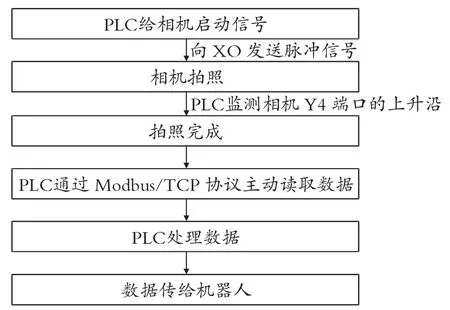
图2 智能相机与PLC的通信流程图
2.3 机器人手臂的控制过程
机器人手臂的控制程序通过带有KEBA系统的示教器来编写,编写方法也是先编写主程序和子程序,再用主程序调用子程序,其中子程序分为2个模块:吸取一号工件,抓取二号工件。整个机器手臂的控制是通过主程序调用子程序来实现快速的工件放置、组装和拆解,其基本运行步骤见图3。
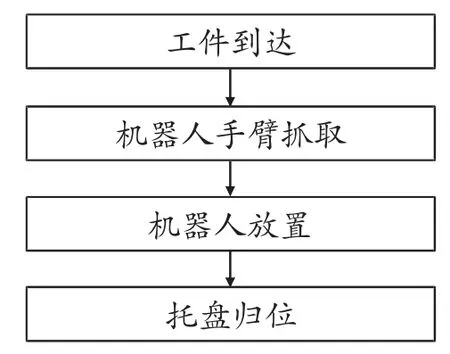
图3 机器人基本运行步骤
3 研究控制结果
通过具有KEBA机器人软件程序编辑系统的示教器已基本实现了对机器手臂的三维运动控制,实现了通过PLC中Modbus/TCP通信协议来对PLC、机器手和视觉信息采集系统三者之间建立通信联系,并且机器手可自动根据工件类型的不同采取不同的抓取动作。
4 结束语
近年来,随着 “工业4.0”时代的来临,工业机器人 (机械手臂)的应用及发展速度极快,种类越来越多,控制手段越来越复杂,而基于PLC控制的工业机器人有着控制程序简便、快速、灵活多变、易懂等特点。通过西门子S7-1200系列PLC对机器手臂的多维运动研究,了解到PLC对机器人系统的操作灵活性以及PLC基本控制的应用之宽广,随着研究的不断深入,越来越多地发现PLC通用性的便捷之处及其魅力所在。
猜你喜欢
杭州电子科技大学学报(自然科学版)(2022年4期)2022-08-23
杭州电子科技大学学报(自然科学版)(2022年3期)2022-06-08
现代计算机(2021年31期)2021-12-29
智能制造(2021年4期)2021-11-04
杭州电子科技大学学报(自然科学版)(2020年3期)2020-06-08
数字技术与应用(2019年9期)2019-12-13
日用电器(2019年12期)2019-02-26
电脑爱好者(2017年10期)2017-06-01
中国科技纵横(2015年2期)2015-11-05
科学中国人(2014年16期)2014-11-20
