
基于模糊PID的恒张力控制助力铺排船航迹跟踪
2020-04-01 03:46夏声宏钟世位李宗华王智诚
交通科技 2020年1期
夏声宏 钟世位 李宗华 王智诚
(长江重庆航道工程局 重庆 400011)
在内河航道治理工程中,航道水下导堤、丁坝、潜堤等的主体结构堤身下均用软体排进行护堤。软体排铺设船(以下简称铺排船)是航道治理工程中铺设土工布软体排的专用设备,其作业目标是将结构形式不同、平面尺寸极大(一般为22 m长、40 m宽)的柔性排体在水下按照计划的轨迹铺展,确保护底作业的施工质量。因为铺排船的施工作业是在抛出5~8个锚后,通过对各锚轿车的收放锚缆实现移船的同时将排体沿着计划的坐标和工作线下放至水底。显见铺排船作业系统的控制对象不仅分散,而且要求协调同步,控制难度大。而水下敷设排布的施工作业精度要求高,两块排体搭接必须保证在0.5 m。因此铺排船的自动控制系统研究都是从控制锚绞车入手来提高移船方向和速度,从顺水、逆水、垂直水流等作业情况结合风、浪的环境影响来考虑控制策略,以实现铺排船在不同工况下的高精度铺排。
本文基于长时间对铺排船施工作业质量的评估分析,考虑悬在水中的锚缆张力对铺排船控制效果的影响,提出系统中增加控制锚缆张力的思想。并拟通过应用于实际工程验证其正确性。并用实际工程进行验证。
1 问题的提出及设计思路
铺排船属于非自航的锚泊移位型工程船舶,其定位、移船操作主要依靠拖船和抛锚艇协助。作业前铺排船必须由专门配备的1~2艘拖船将其拖至作业地点,然后按照铺排作业计划先进行抛锚定位。作业时则根据工程计划,操纵锚泊设备来实现船舶的移位和精确定位,同时完成软体排的下放和铺设。铺排船作业的侧视图见图1,卷在卷筒上的软体排在工作平台上完成制作后,软体排通过协调控制多个锚机的收、放锚链速度及卷筒的放排速度,软体排通过主、副滑板凭借其自身重力下滑到水底,一边放排一边操纵锚泊设备移船,实现软体排在水底的铺设。软体排根据施工航道的情况,可制作系袋软体排、沙肋软体排、硅软体排、混凝土联锁块软体排。
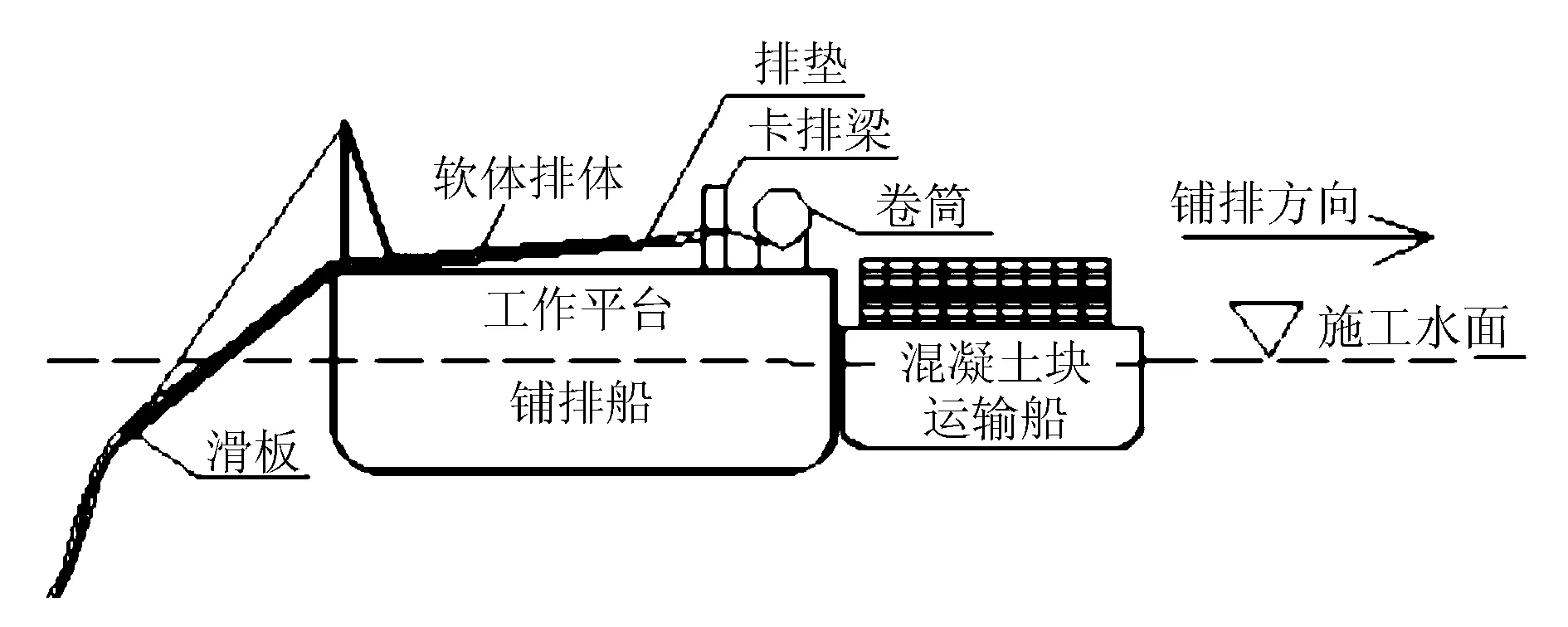
图1 铺排船侧视图
铺排船在作业时,受到的力既有纵向和横向力,还有一定的转舷力矩,因此,铺排船一般采用多点系泊,多条锚泊线向四周发散分布,六锚和八锚的锚泊系统布置形式见图2。
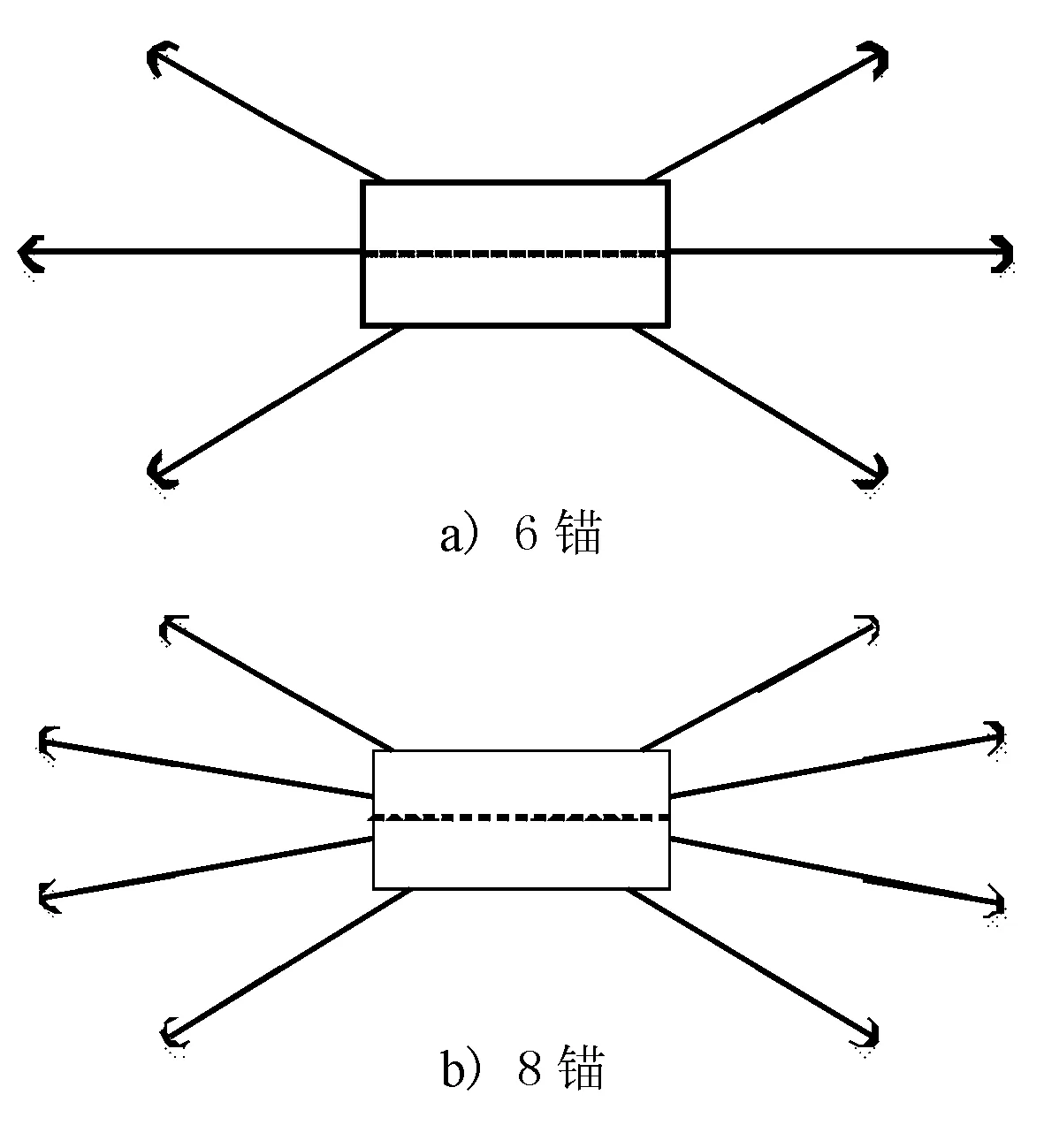
图2 铺排船锚泊线的布置形式
锚泊设备主要由锚绞车、锚链和锚三部分组成,其中锚啮入水下的泥土中为船舶提供着力点,锚链传递拉力固定船舶,锚绞车通过控制收放缆来实现船舶的定位和移动。施工作业时,需要结合当时水域环境的风、浪、潜流等水文情况协调控制多台锚绞车的收放锚链,实现船舶移动时能以要求的精度跟踪计划的轨迹线,完成水下高质量铺排功能。因此目前开展铺排船控制研究的重点在:铺排船的分布式控制系统[1-3]、锚泊移位型船舶的建模,以及采用神经网络、模糊逻辑、粒子群等智能方法实现铺排船的平行移船和动态定位[4-5]。这些成果在重庆航道工程局的22 m排宽的“俞工排1号”、40 m排宽的长雁系列铺排船上得到成功应用,为我国铺排船的理论研究和实际应用奠定了坚实的基础。
随着航道疏浚行业的快速发展,铺排船大型化、作业深水化,而且顺水、逆水、垂直水流等的多样化等铺排工艺要求不断提高,铺排船的自动控制难度也随之提高。本文依托40 m排宽的“长雁2号“和”长雁22号“铺排船控制系统升级改造项目,针对铺排船网络系统、自动控制系统的控制策略优化后,仍然存在铺排船在风、浪、流的复杂环境下自动铺排作业航迹偏差较大、动态响应变差的问题开展深入研究,从绞车的恒张力控制入手,设计了一种基于模糊PID的恒张力控制方式,使得锚链在自动铺排时能始终保持在张力恒定的张紧状态,提高了铺排控制效果,从而降低了铺排船自动铺排工况下的航迹偏差,提高了航迹跟踪精度。
2 液压型锚绞车锚链张力计算
“长雁”系列铺排船配置有8组液压型锚泊设备,铺排前一般根据需求和规划设计抛出5~8个锚。液压锚泊设备是通过驱动绞车组收放锚缆来实现移船,绞车组由1台摩擦绞车和1台容缆绞车构成。容缆绞车位于甲板下方的机舱,主要作用是存储缆链,不需要提供移船时的张力,在锚绞车收缆时同步收缆,放缆时只需放开刹车随锚链转动,不需要调速。摩擦绞车一般布置在船艏艉甲板上,摩擦绞车是为铺排船舶定位和移船提供动力的,功率较大,所以设置了2个驱动轮,从容缆绞车出来的锚链绕摩擦绞车1周后与锚连接,摩擦绞车通过和锚链的静摩擦为锚链提供张力,摩擦绞车在工作时摩擦力的作用半径为固定值。由于移船的速度需要可调,故需要3组开关量控制电磁阀实现正反转和刹车,1组模拟量来控制液压马达比例阀开度实现调速。
为实现液压绞车恒张力控制,以锚链的张力检测值作为反馈实现张力的闭环控制。目前成熟的张力测量方法有直接测量和间接测算2种。直接测量是在锚缆上串接拉力传感器或弹簧测力计直接获取张力,但这种方法只适用于静态张力获取,不适合铺排船需要长距离收放缆实际工况。所以本文通过液压绞车进出机的压力差Δp来间接测算锚缆张力。
根据能量守恒定律有
ML2πn=ΔpQs=Δpqn
(1)
式中:ML为液压绞车的理论转矩;n为液压绞车转速;Δp为工作压差;q为液压绞车排量;Qs为液压绞车的实际流量。
由式(1)可以推出液压绞车的理论转矩为
(2)
但由于流体与液压绞车零件之间相对运动的摩擦,液压绞车零件之间的摩擦均会产生能量损耗。这些损耗的外在表现为液压马达的机械损失,使得实际输出转矩低于理论转矩,即
MS=ML-ΔM
(3)
式中:ΔM为由于摩擦造成的转矩损失。
在液压系统中用机械效率描述这一损失的比重,机械效率定义为实际输出转矩与理论输出转矩的比值,即
(4)
则
(6)
由式(5)可计算出液压绞车的实际输出转矩。若液压绞车的半径为R,则锚缆张力F为
(6)
式中:Δp为液压绞车工作压差,可从液压绞车进出机压力传感器的值获到;q为液压绞车排量;p为绞车的固有参数,可通过液压马达技术参数查到;R为液压绞车半径,需在现场测量得到,是一个定值;ηm为液压马达的机械效率,每台绞车的机械效率各有不同,因此,需要在铺排船出厂前对绞车逐台整定其机械效率,以保证缆绳张力计算的准确性。
3 模糊PID张力控制器设计
3.1 模糊PID控制原理
传统PID控制虽然算法简单易于实现且调整时间较快、精度较高,但是其参数的整定取决于控制对象的数学模型,而且抗干扰能力不强。而铺排船的大惯性和不确定的水文环境特点,难以建立铺排船的数学模型。而模糊PID不需要精确的数学模型,能较好地处理时变、非线性、滞后等问题,而且有很好的鲁棒性和快速的响应速度,因此,本文采用模糊PID控制实现锚缆恒张力控制,模糊PID控制锚缆张力的系统结构图见图3,将计算出的锚缆张力和给定张力的偏差值e和锚缆张力偏差值变化率de/dt作为模糊控制器的2个输入,对2个输入进行模糊化后,通过模糊推理之后得到清晰化的输出来调整PID的Kp、Ki、Kd3个参数。解决传统PID控制器不能对象变化和环境变化自适应改变PID参数的缺点。
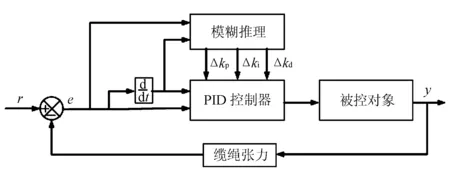
图3 模糊PID控制器结构
3.2 控制变量模糊子集设计
本文选取锚缆张力偏差E的基本论域[-20,20],模糊域为E={-2,-1,0,1,2},则与其相应的各语言值为{NM,NS,ZO,PS,PM},其意义分别为绳子状态“极松”“松”“松紧适当”“紧”“极紧”。取锚缆张力的变化率Ec的基本论域为[-1,1], 模糊域为Ec={-2,-1,0,1,2},则与其相应的各语言值为{NM,NS,ZO,PS,PM},其意义分别为缆绳张力“快速减小”“缓慢减小”“不变”“缓慢增大”“快速增大”。并取Kp,Ki,Kd3个参数的模糊论域均为{-2,-1,0,1,2},则与其相应对应的各语言值均为{NM,NS,ZO,PS,PM}。
3.3 模糊控制规则
模糊规则是模糊逻辑控制的关键,根据铺排船绞车操作人员积累的实际操作经验和每台绞车的实际使用情况,需要分别总结并设计出各绞车的模糊控制规则,以达到良好的控制效果[6]。下文以艏主锚绞车为例,介绍模糊设计的控制规则,见表1。
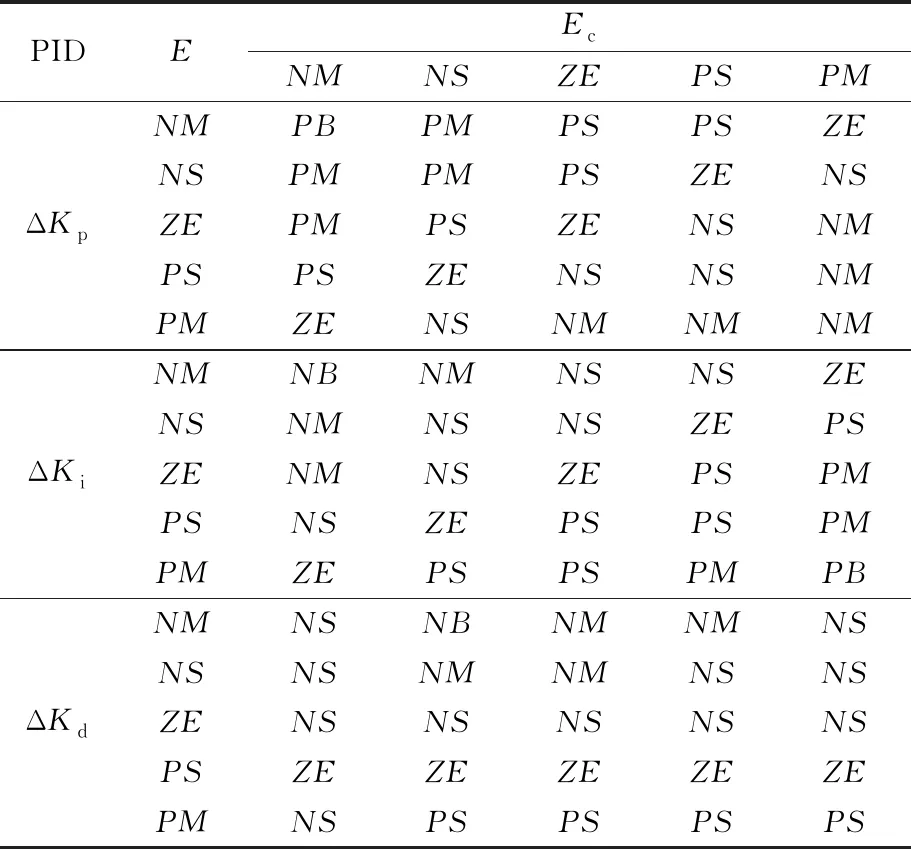
表1 模糊控制规则表
3.4 输出清晰化
由模糊推理得出的结果是一个模糊集合,在实际应用场合时,须用一精确值来控制被控对象。本文用重心法去模糊化,然后结合工程实际工作情况微调其参数,最后得到模糊查询表,见表2。
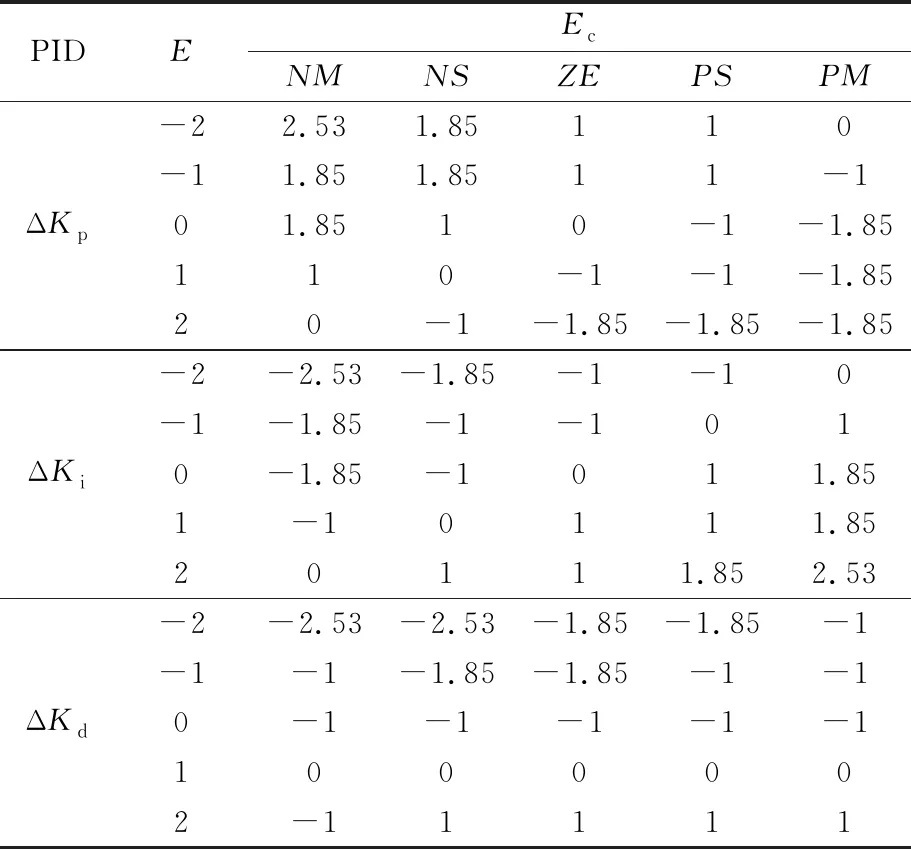
表2 模糊查询表
4 实际应用效果
为验证本文设计的恒张力控制策略的控制效果,将模糊PID恒张力算法应用于“长雁2号”铺排船的PLC逻辑控制程序中,通过铺排船上位控制软件获得的铺排船实际作业的航迹偏差验证模糊PID控制策略的控制效果。
铺排船上位监控系统的自动铺排作业界面图见图4,该工程采用五锚定位方式,由于是护岸工程,有2个锚是固定于岸边的,图中矩形框为施工要求铺排的工作线,按位置示意铺设于江底。排布的一次工作线从下至上由1条实线和1条虚线构成,实线和虚线分别代表了排布的上下边缘。为了能有效避免水土流失,每条排布间需要有一定的搭接度(本次作业的搭接度为5 m)。
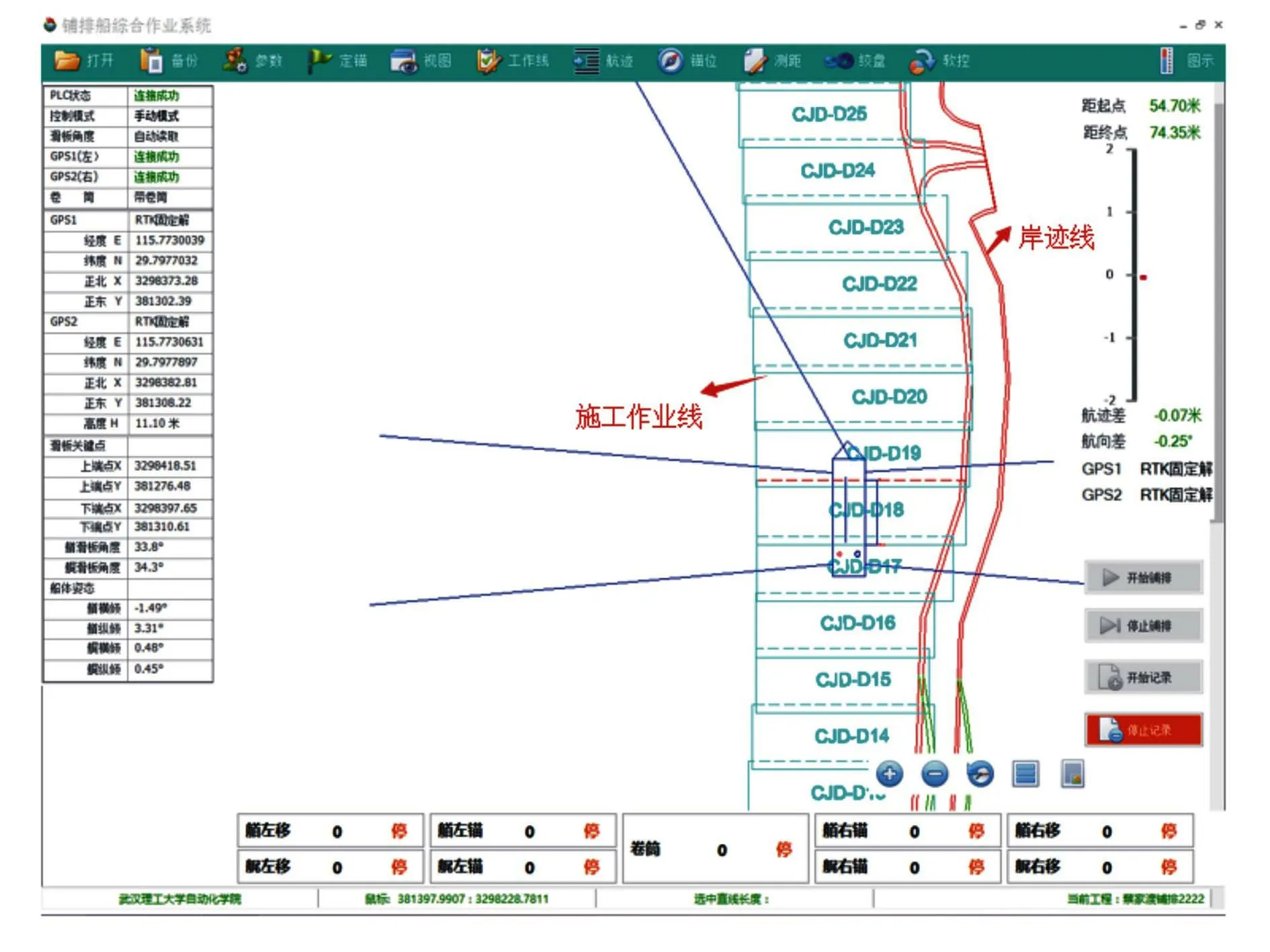
图4 上位机自动铺排界面
4.1 PLC控制系统未启用恒张力控制算法的铺排轨迹
以长江蔡家渡区域1 d铺排工作量(1条排布)的轨迹误差的平均值对比系统启用恒张力算法前后铺排船工作的完成质量。
蔡家渡1号排铺设后上位机保存的航迹图(实线为计划的排布边缘线,虚线轨迹为实际铺排的边缘线)见图5,为了方便计算对比航迹偏差,在CAD文件中加入栅格,一格代表大地坐标10 m。用面积法求得航迹偏差的平均值为1.89 m。
图5 PLC未启用恒张力模块铺排船自动铺排航迹
4.2 PLC控制系统启用恒张力算法后铺排航迹
蔡家渡2号排铺设完成后上位PC保存的航迹图见图6,用面积法求得航迹偏差的平均值为0.78 m,显见,启用恒张力算法后航迹平均误差只有未采用恒张力算法后航迹平均误差的41%,平均误差减少了59%。
2次铺排作业地理位置相同,环境相同,2块相邻排布铺设时间间隔仅为1 d,水流速度变化也不大,由此可见,模糊PID控制的恒张力控制策略可以明显提高自动铺排程序的控制效果。

图6 PLC启用自动铺排模块铺排船航迹
5 结语
铺排船是为长江航道整治工程研制的一种工程类船舶,因其作业靠多锚协调牵引移船来实现软体排准确铺设在江底,故影响控制效果的因素很多,控制难度大。经过大量实践,本研究提出在研究其驱动控制策略的同时关注锚缆张力,并将该算法加入到原系统控制中,实际应用结果证明了本文算法的有效性。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
水道港口(2022年2期)2022-07-04
船海工程(2021年6期)2021-12-17
上海交通大学学报(2021年2期)2021-03-02
军事文摘(2020年24期)2020-11-29
船舶标准化工程师(2020年1期)2020-06-12
中国修船(2018年5期)2018-10-17
舰船科学技术(2018年8期)2018-09-02
江苏船舶(2015年1期)2015-05-06
中国质量与标准导报(2014年12期)2014-02-28
