
多传感器融合的弹道环境参数存储测试系统研究
2020-03-05 02:34王亚斌郭开心
兵器装备工程学报 2020年1期
王亚斌,郭开心
(北京理工大学 机电学院,北京 100081)
高速旋转稳定弹的弹道安全性问题是一个亟待解决的问题,对于中大口径榴弹进行多传感器弹道环境参数测试,并对弹丸运动规律的分析,是进行安保机构设计、改善弹道安全问题的前提。美国陆军研究室自2000年开始持续开展基于地磁的高速旋转弹姿态测试方法,在地磁测试方面已经积累了成熟的经验,对于弹丸飞行全局的地磁数据进行采集,数据能够分析出飞行过程中的弹丸章动[1-4],杨登红等[6]研究了一种基于单轴陀螺仪的姿态角提取方法,但是陀螺仪恢复在弹丸飞行过程中建立稳定所需要的时间远大于地磁传感器和加速度计。早期常用纸靶法[7]来进行弹丸来进行弹丸章动分析,近年来张龙等[7]对基于弹载地磁测试的高速旋转稳定弹锥形运动对弹丸出炮口章动进行了分析,王宝元等[8]使用高速摄像对炮口100 m内弹丸飞行运动进行跟踪,对章动进行了分析,王元钦[9]通过对雷达底部回波进行分析对弹丸章动进行了分析,在实际弹丸运动中,在弹道末段章动也很大。
通过以上分析可知,研究一种低功耗,高精度的多传感器融合的弹道环境参数存储测试系统,针对高动态,高过载的中大口径榴弹进行全弹道存储测试,对过载和后效期对地磁传感器和加速度的影响进行分析,对弹丸章动的周期进行分析,为未来引信的解保算法设计和传感器方案设计提供更多依据具有重大的实用价值。
1 系统总体方案设计
多传感器融合的弹道环境参数测试系统在炮射实验中,承受最高可达数万g的冲击过载,高频振动,在飞行过程中,更是表现出高转速,高动态特性,为保证该测试系统能够在实际应用环境可靠使用,设计应遵循以下准则:
1) 抗高冲击过载。测试系统不仅存在发射过载,也存在落地过载,经试验落地过载会将露在弹外部的尖头部分毁坏,所以在设计过程中不仅要考虑到使用灌封技术提高系统的可靠性,还需要设计有效的保护方式对数据存储模块安全进行保护;
2) 多方案供电。测试系统在飞行过程中由电池供电,回收后使用外部电源供电,需对系统进行多方案供电设计。
3) 高采样率高精度。以155榴弹为例,转速最高可达300 r/s,需要高采样率才能从数据中提取出弹丸转一圈的最值点,进行转速分析;弹丸飞行章动角较小,只有高精度才能提取出弹丸的章动运动趋势。根据对典型需求的分析,提出了多传感器融合的但到环境参数测试系统设计方案,主要性能指标如下: 数据采集通道为8通道:包括大量程加速度计、三个两两正交的小量程加速度计,两个正交放置的两轴地磁传感器(其中一个轴为冗余轴); 采样率16 ksps,采样率高于转速50倍以上,能够测量到弹丸转一圈的运动规律; 采样分辨率16 bits:地磁信号一般为±60 000 nT,当章动角为5°时,章动信号最大在5 000 nT以内变化,所以要求高分辨率; 工作时间≮120 s:中大口径榴弹弹道飞行时长一般不超过120 s。 存储器容量≮30 720 000字节:基于上述采样通道数、采样率,采样分辨率分析算出。
2 测试系统硬件设计
2.1 测试系统工作原理
多传感器融合的弹道环境参数测试系统主要由传感器模块,信号调理电路,A/D转换电路,STM32F401微控制器,存储电路,下载电路,通信电路,电源电路等组成,工作原理框图如图1。

图1 工作原理框图
2.2 存储测试系统电路设计
本存储测试系统传感器模块结构如图2所示,传感器包括一个大量程加速度计(量程50 000g,用于测量膛内过载、落地过载并作为采样触发条件),3个小量程加速度计(ADXL1002,量程±50g,用于测量弹体飞行过程中捷联在弹体上的测试系统3个轴的加速度),2个双轴地磁传感器(HMC1052,正交放置,用于测量弹体飞行中捷联在弹体上的测试系统的三个轴的地磁数据,其中一个轴为冗余轴)。

图2 测试系统传感器模块结构
该测试系统需要低功耗,外设通讯协议简单且标准化,而且对SPI速率有一定要求,综合考虑选择STM32F401作为主控芯片。对于包括四轴地磁数据通道(1个冗余轴),4个加速度计数据通道(1个大量程加速度计,3个小量程加速度计)的8通道模拟信号,选择AD转换精度16位,16 ksps采样率进行数据采集,共128 ksps,选择500 ksps的AD8699作为AD转换芯片,通过SPI接口控制转换信息。选用32M的Flash存储器W25Q256。
2.2.1地磁传感器电路设计
地磁传感器选择HMC1052,其灵敏度≥50 nT/uV,,线性误差≤1×10-4,零漂≯±1 mV,敏感轴垂直度误差≯0.01°,工作原理如图3所示。在工作前,需要用一个脉冲电压对传感器进行置位复位,置复位原理如图4所示。

图3 地磁传感器工作原理示意图
图4 地磁传感器置位复位原理示意图
2.2.2小量程加速度计电路设计
弹丸飞行过程中,轴向加速度计受到空气阻力,径向加速度计由于安装误差承受离心加速度并随着弹体转动加速度值有≯±1g的周期性重力加速度分量变化,在此应用环境下选择小量程加速度计选择ADXL1002,量程为±50g,原理如图5所示,通过两个RC滤波电路滤除高频噪声。
图5 小量程加速度计原理示意图
3 存储测试系统软件设计
在存储测试系统软件设计部分,首先对存储器写入方式进行设计,再进行整个系统软件设计。
3.1 存储器编程方式
本文软件设计基于以下三点原因针对W25Q256选择页编程方式进行写入:
1) FLASH存储器在写入前需要对存储器进行擦除,擦除时间较长,所以在弹上采集和存储过程中不能循环写入,FLASH存储器使用页编程并通过控制器中的RAM累积数据并通过DMA进行数据传输更能节省CPU的占用时间,累积数据量需要在一个AD转换间隔内完成数据传输,经过试验验证页编程满足相关时序要求。
2) 本方案采用大量程加速度计触发采样的方式,为了测试得到更完整的数据,参考铁电存储器的可以循环写入的优点,在STM32F401内部选出一段RAM区进行循环读取,当触发信号出现,将RAM区数据通过页编程方式全部存入FLASH存储器。
3) 使用数据按页写入,可以对页进行编号,在数据读取后对数据存储的可靠性进行校核。
3.2 系统软件总体设计
存储测试系统软件功能上分为在上弹前的数据擦除、发射后弹上的数据采集与存储和回收后的数据读取3部分。上弹前的数据擦除主要是通过串口发送指令控制STM32F401通过SPI总线向存储器芯片发送擦除指令;回收后的数据读取主要是通过串口发送指令控制STM32F401通过SPI总线向存储器芯片发送发出数据读取指令和读取地址,并将数据读入STM32F401,再将数据通过串口发送给上位机。弹上数据采集与存储部分流程如图6所示。
图6 弹上数据采集与存储流程框图
如图6所示,系统上电复位,初始化,等待指令。收到上位机发送的数据采集与存储指令后,首先根据通信协议信息产生nmin的延时,在延时期间完成存储测试装置的装配,并装入测试火炮中,以免上弹过载产生误触发信号;延时结束后开始AD转换,并按照3.1节所述存入RAM区,同时等待触发信号出现;在触发信号出现后开始进行数据存储,在两次AD转换期间将RAM区数据通过DMA方式传入存储器,开始下一次RAM区累计,累计满后存入存储器;存储器存满停止采样。
4 测试系统实验及数据分析
该存储测试装置通过螺纹旋入弹内,其中一部分在弹体外部,一部分在弹体内部。考虑到弹体外壳是铁磁性材料,地磁传感器置于弹体内部测量地磁信号时会受到影响所以传感器部分需要置于弹体外部。存储测试装置受到的落地过载可能使弹体外部部分受到损坏,所以数据存储模块需要置于弹体内部。基于以上分析设计图7所示存储测试装置机械结构。对存储测试装置进行装配、灌封、高低温测试后进行电气性能最终测试,测试完成后进行火炮试验。
图7 硬件机构结构
4.1 过载数据分析
图8所示过载测试曲线为本测试系统测试得到的炮口过载和落点过载信息,膛内运动持续时间约为0.027 s,膛内过载随膛压变化先增大后减小,在约0.005 s取到最大值8 401 g,在炮口后效期振动大于4 000 g,落点过载20 000 g左右。

图8 过载测试曲线
4.2 出炮口附近多传感器数据
图9为出炮口附近的大量程加速度计、单轴小量程加速度计和单轴地磁传感器曲线(由于纵轴单位不统一,故隐去刻度)。从图中可知,火炮内弹道过程电磁环境复杂,地磁传感器失效,在出炮口处即0.027 s地磁传感器恢复正常,所测数据随弹丸转动周期性变化。炮口后效期在地磁传感器转动1.25个周期后结束,结束时间约为0.032 s。加速度传感器在炮口后效期结束后0.02 s数据恢复正常,在此期间,地磁传感器又转过0.5个周期。

图9 出炮口附近多传感器数据
4.3 基于地磁传感器和小量程加速度计数据进行转速分析
图10和图11为小量程加速度计和地磁传感器弹道全局、弹道起点、弹道中间和弹道末端的曲线,分别取十个周期求平均值测得初始转速、弹道中间段转速和弹道末端转速,并根据初速雷达测得速度求得初始转速,雷达测得初速为517.23 m/s,可算出初始转速为166.9 r/s,有关初始转速数据如表1所示。

图10 小量程加速度计曲线
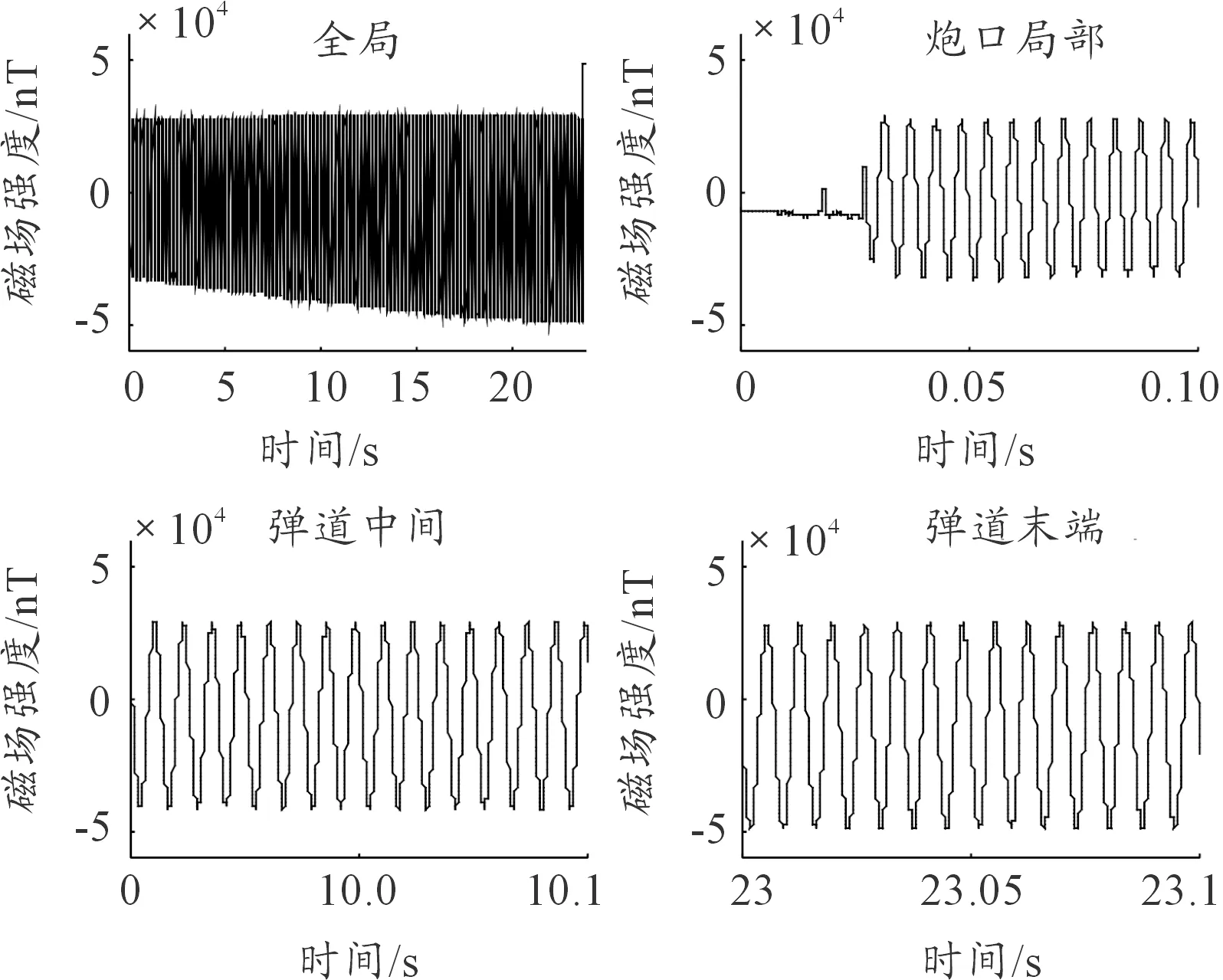
图11 地磁传感器曲线
表1 初始转速数据

飞行阶段雷达解算转速/(转·s-1)地磁解算转速/(转·s-1)加速度计解算转速/(转·s-1)弹道起点166.9171.1169.5弹道中间—152.8148.9弹道终点—135.5127.9
4.4 基于地磁传感器包络数据进行章动周期分析
图12和图13为地磁传感器下端包络曲线和上端包络曲线,从数据能够看出在出炮口附近,弹丸运动呈现明显的进动和章动组合的两圆运动趋势,进动周期为0.5 s,章动周期为0.07 s。在整个弹道过程中,进动呈先变大后变小趋势,章动呈逐渐减小趋势。在弹道末段,只能看到明显的进动,进动周期为1 s。

图12 地磁传感器数据底部包络曲线
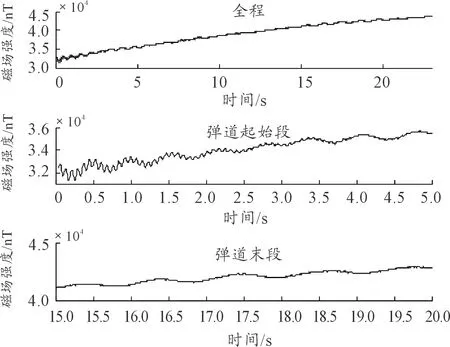
图13 地磁传感器数据顶部包络曲线
5 结论
本文将存储测试技术和阈值触发技术用于高动态旋转稳定弹的弹道环境参数测量,实现了多传感器融合的弹道环境参数测试系统软硬件设计,并通过实验证明了数据存储的完整性,可靠性。
本文对弹丸发射过载进行分析,数据表明弹丸所受大过载一次在最大膛压处,第二次在炮口后效期;本文对出炮口附近的大量程加速度计、小量程加速度计和地磁传感器数据进行对比,表明弹丸在膛内电磁环境复杂,地磁传感器和小量程加速度计失效,在出炮口地磁传感器恢复正常,在炮口后效期后小量程加速度计恢复正常。
本文通过对地磁传感器和加速度计出炮口、弹道中间段和弹道末段数据对比分析,得出转速变化规律;本文对地磁传感器提取包络,揭示整个弹道过程中的章动周期变化的规律,进动在出炮口和弹道末段较大,弹道中间段较小,章动在出炮口最大,然后逐渐变小,在出炮口处表现出明显的两圆运动趋势。
猜你喜欢
仪表技术与传感器(2022年9期)2022-11-02
兵器装备工程学报(2022年10期)2022-11-01
弹箭与制导学报(2022年1期)2022-04-01
传感器与微系统(2022年3期)2022-03-23
飞控与探测(2021年5期)2022-01-05
弹道学报(2021年4期)2021-12-24
军民两用技术与产品(2021年7期)2021-10-13
火炮发射与控制学报(2021年3期)2021-09-23
理科考试研究·高中(2016年8期)2016-05-14
基层建设(2015年36期)2015-10-21
