
扑翼飞行器气动仿真分析
2020-03-05 02:34邵伟平郭梦辉郝永平
兵器装备工程学报 2020年1期
邵伟平,郭梦辉,郝永平,李 伦
(沈阳理工大学 机械工程学院, 沈阳 110159)
经过漫长的进化历程,自然界中的飞行生物全部采用了扑翼飞行的方式,自古以来,人们对生物的扑翼飞行具有强烈的好奇心,但受制于制造技术的发展,人们一直无法制造出能够飞行上天的扑翼飞行器,因此,人们的目光转向了固定翼和旋翼飞行;但是,MEMS技术的发展使人们制造扑翼飞行器的希望成为了可能。相比于固定翼、旋翼的飞行方式,扑翼飞行不仅在低雷诺数下具有更高的效率,同时扑翼飞行具有机动能力强、结构紧凑的优点。
气动特性的研究在任何一种飞行方式的实现中都起着关键作用,由于扑翼飞行的速度较低,属于低雷诺数下的飞行,传统的固定翼飞行器空气动力学理论不再适用,扑翼飞行的气动机理相比于传统的飞行方式要复杂的多,在这方面的研究成果远不如固定翼和旋翼方面丰富。计算流体力学软件(CFD)的发展使得对扑翼飞行气动特性的研究变得简单、大大减少了研究者的工作量。
对于扑翼飞行的高升力机理的研究,最早的非定常推力模型是由Garrick建立[1],之后,Fairgrieve[2]将非定常推力模型拓展应用到了求解非平面尾流和非正弦振荡的周期中,在大型扑翼机机翼的气动力分析方面,DeLaurier[3]采用了叶素理论将机翼沿展向分为若干个带状单元,作用与每一个单元上的气动力与该单元的上下扑动和扭转运动相关。陈亮、管贻生[4]采用改进的叶素理论对低雷诺数、非定常条件下仿中小尺寸飞鸟扑翼机器人的空气动力学问题进行了研究,左德参[5]针对仿鸟刚性薄板翼扑翼考察了扑动参数对气动特性的影响。
传统的气动分析都是使用单一的CFD软件,通过编写UDF控制程序来控制扑翼各部分的运动,事实上,这种控制方式并不能准确地模拟出所设计模型的实际运动,更难以发现所设计模型在气动特性上的缺陷,而且,要使各部件按照设计的运动方式进行运动,操作比较复杂、精度难以保证;采用多个软件的接口进行联合仿真时,数据在软件接口中进行传输,进行一次定义后,不需要重复定义、换算、编程,不仅提高了解算的精度,而且节省了大量的时间和人力。本文采用动力学仿真软件ADAMS和计算流体力学软件XFlow进行联合仿真,分析仿生扑翼飞行器的气动特性,图1为联合仿真流程示意图。

图1 联合仿真流程示意图
1 仿生扑翼飞行器模型建立
1.1 鸟类翅膀扑动模式
以往的研究者根据对鸟类飞行的观察,总结出鸟类飞行时翅膀的扑动规律,将飞行过程分为四个过程,即下扑阶段、折叠阶段、抬升阶段、展平阶段,如图2所示。各个阶段翅膀的动作各有特点。下扑时,翅膀伸直,使得翅膀的受力面积尽可能地大;到达最低点,外翼开始内收折叠;抬升阶段,翅膀不断折叠,以达到减小上升阻力的效果;到达最高点时,翅膀迅速展平,准备开始下扑。

图2 鸟类翅膀扑动规律
参考文献[6],建立多段式扑翼模型如下:
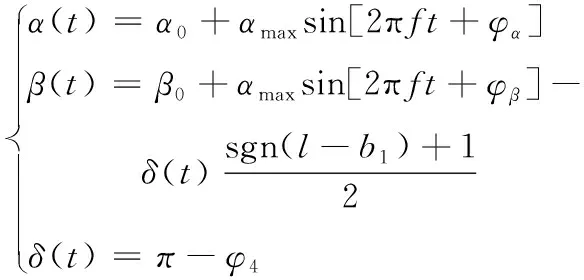
(1)
其中,l为扑翼截面展向位置;b为主翼长度;δ(t)为主副翼扑动角度函数,图3为鸟类翅膀折弯角示意图。

图3 鸟类翅膀折弯角示意图
1.2 仿生扑翼飞行器模型
常规的仿生扑翼扑翼飞行器的驱动结构为单段式,尽管这种驱动结构具有结构简单、容易实现的优点,但是其气动特性较差,多应用于仿昆虫的扑翼飞行器上。为了获得更加优良的气动特性,本文设计了一种“挥拍-折叠”扑翼机构,图4表示仿生扑翼飞行器虚拟样机在一个周期内的运动。该款模型身体全长75 cm,横截面最大直径为90 mm,翼展1.4 m,内段翼长170 mm,外段翼长485 mm,机翼弦长40 mm,机翼采用从翼型设计软件Profili V2中选取的具有优良气动能力的BE8457E型号翼型作骨架结构,如图5。
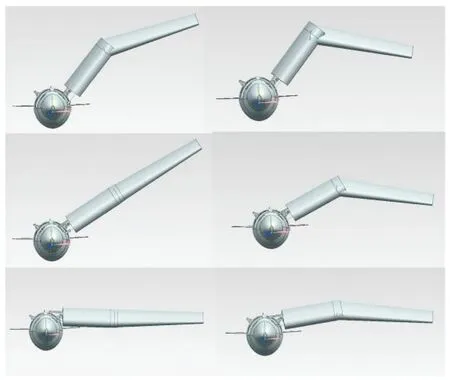
图4 仿生扑翼飞行器样机一个运动周期的图解

图5 BE8457E翼型骨架结构
2 仿真方案设计
为了研究不同的空气来流速度和扑动频率对仿生扑翼飞行器的气动特性的影响,本文设置了5组不同的扑动频率和5组不同的空气来流速度。在仿真方案中,分别设置来流速度分别为1 m/s、2 m/s、3 m/s、4 m/s、5 m/s;扑动频率设置为1 Hz、2 Hz、3 Hz、4 Hz、5 Hz。
为了真实地反映所设计的模型的气动效果,将在三维建模软件UGNX中设计的模型进行适当简化后以parsolid的格式导入到ADAMS中[7],施加约束、驱动,进行解算后,将部件和解算方案分别以step格式和res格式导入到XFlow中,即可实现ADAMS与XFlow联合仿真。
在XFlow中设置计算域的尺寸、来流速度、粒子大小及流体的各项参数。计算域的尺寸要满足一定的条件,过大尺寸的计算域将会极大地增加计算量、耗费时间,过小尺寸的计算域又会降低仿真精度,本文中计算域的大小为6 m×2 m×0.8 m的长方体。粒子大小对仿真结果具有极其重要的作用,理论上来说,粒子越小,仿真结果越精确,但对计算机的硬件的要求会更加严苛,过大尺寸的粒子又会使仿真失真。XFlow默认的流体为空气,设置其温度为20°、动力粘度系数为1.81×10-5Pa·s、流体密度为1.205 kg/m-3、出口边界条件相对于入口边界条件的相对压力值为0 Pa。解算方案采用自适应的局部涡粘性模型,该模型提供了一个统一的局部涡及近壁面行为,可在保证精度的同时,提高解算速度,减少解算时间。
3 仿真结果分析
3.1 扑动频率对气动特性的影响
机翼的上下扑动提供了仿生扑翼飞行器飞行所需的升力及推力,扑动频率对气动特性具有重要影响。保持空气来流速度为3 m/s,研究扑动频率分别为1 Hz、2 Hz、3 Hz、4 Hz、5 Hz时的气动特性,其余的仿真参数保持不变,设置仿真时间为2 s,图6为升力系数CL及推力系数CT曲线,图7、图8分别为相同来流速度不同扑动频率(从上至下1~5 Hz)下的速度云图及展向压力云图(左侧为下扑过程,右侧为上扑过程)。
从图6可以看出,仿生扑翼飞行器的升力系数、推力系数保持着周期性的规律变化。在相同频率、相同来流的情况下,升力系数的正峰值比负峰值大,这对于仿生扑翼飞行器能否飞起来起着至关重要的作用;在保持来流速度不变时,仿生扑翼飞行器的升力系数峰值、推力系数峰值随着扑动频率的增加而增大,这是因为由于扑动频率增大,扑翼上下表面的压差增大,从而升力系数曲线和推力系数曲线的峰值也不同程度地增大;同时,随着扑动频率的增加,使得扑翼主动折弯过程中翅膀速度的波动对气动特性的影响逐渐减小。下扑阶段,升力系数为正、推力系数为正,证明下扑阶段产生升力和推力;上扑阶段,升力系数为负、推力系数为负,证明下扑阶段主要产生阻力。
从图7可以看出,在扑翼的整个扑动过程中,副翼附近的空气流速比主翼附近的空气流速大,这是因为副翼的拍动速度比主翼的拍动速度大所导致的;随着扑动频率的增加,扑翼附近的空气流动速度也在增大,并且在副翼主动折弯过程中,空气加速从扑翼表面附近脱落所产生的漩涡也在逐渐增强;下扑时,扑翼上表面附近的空气流速大于扑翼下表面附近的空气流速;上扑时,从引起的空气扰动情况来看,扑翼下表面附近的空气流动速度大于扑翼上表面附近的空气流动速度。
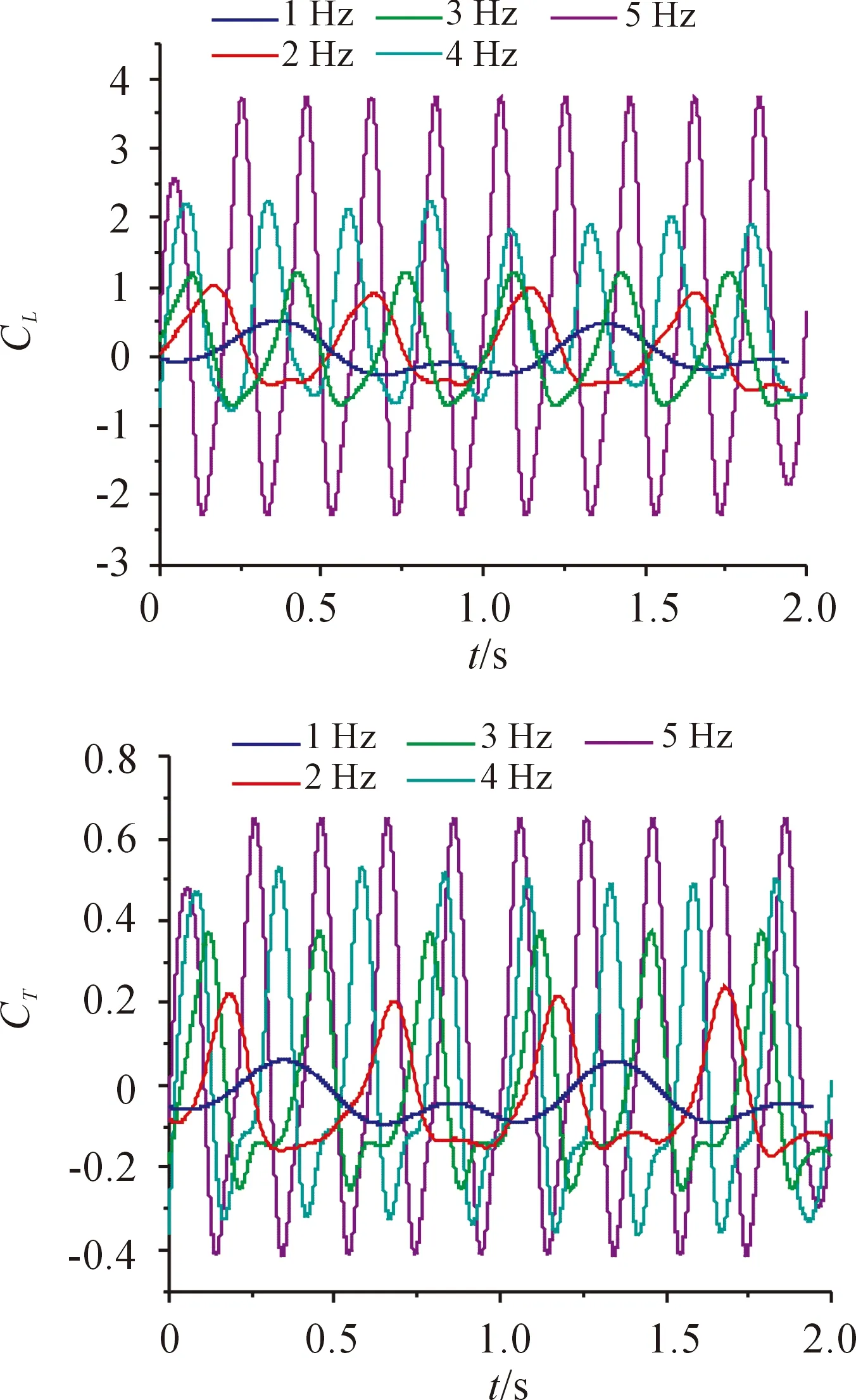
图6 不同扑动频率下升力系数及推力系数曲线

图7 不同扑动频率下的速度云图

图8 不同扑动频率下的展向压力云图
从图8中可以看出,扑翼的压力分布基本上呈现规律性变化,即靠近扑翼末端附近的压力比靠近机身附近的空气压力大,并且下扑过程与上扑过程中,扑翼下表面与上表面分别产生高压区域,这是由图7中可看到的主副翼附近的空气流动速度的差异所造成的;随着扑动频率的增加,扑翼上下表面附近的压力差逐渐增大,扑翼表面附近的压力差增大有利扑翼产生高升力,这可以解释图6中升力系数CL曲线的峰值变化。
3.2 来流速度对气动特性的影响
在实际生活中,空气的流动速度是时时变化的,仿生扑翼飞行器在不同流速的空气中所受到的升阻力系数也会不同程度地发生变化。保持仿生扑翼 飞行器的扑动频率为2 Hz,研究来流速度为1 m/s、2 m/s、3 m/s、4 m/s、5 m/s时的气动特性,其余仿真参数保持不变,设置仿真时间为2 s,图9为相同扑动频率不同来流速度下的升力系数CL及推力系数CT曲线,图10、图11分别为相同扑动频率不同来流速度(从上至下1~5 m/s)的速度云图与展向压力云图(左侧为下扑过程,右侧为上扑过程)。
从图9可以看出,升力系数幅值和推力系数幅值随着来流速度的增大而逐渐减小,这是因为随着来流速度的增加,扑翼表面附近的空气被快速带走,使得扑翼上下表面难以有效地形成压力差,造成升力系数和推力系数的峰值相应地降低;同时,可以看出随着来流速度的增加,扑翼主动折弯过程中副翼速度的波动对气动特性的影响逐渐地缩小。

图9 不同来流速度下升力系数及推力系数曲线

图10 不同来流速度下的速度云图
从图10可以看出,下扑过程中,扑翼上表面的空气流速高于下表面的空气流速,并且随着来流速度的增加,扑翼表面的空气流速增加,扑翼附近的空气流动逐渐变得紊乱;上扑过程中,从对空气的扰动情况来看,扑翼下表面的空气流速要高于上表面的空气流速,并且随着来流速度的增加,扑翼折叠时在扑翼下方所产生的涡旋逐渐增强,这有利于平衡上扑时扑翼折叠过程中扑翼速度波动对气动特性的影响,因此,升力系数曲线及推力系数曲线波动幅度逐渐减小。

图11 不同来流速度下的展向压力云图
从图11可以看出,下扑过程中,扑翼下表面的压力明显高于扑翼上表面的压力,并且随着来流速度的增加,扑翼表面附近的空气被快速带走,扑翼下表面难以有效地形成高压区域,使得扑翼上下表面附近的压力差变小,造成了图9中所看到的升力系数CL的峰值出现大幅度下降,降低了扑翼的气动性能;从右侧的上扑过程也能得到与下扑过程相同的结论,并且随着来流速度的增加,扑翼折叠时在扑翼下方所形成涡旋的压力差逐渐增大。
4 结论
增加扑动频率可以有效地提高仿生扑翼飞行器的升推力系数;增大来流速度将使仿生扑翼飞行器的升推力系数峰值大幅度降低,这与之前利用二维单自由度模型的研究成果相符[8],证明了该方法的可行性和正确性。
ADAMS与XFlow联合仿真的新方法可以提高对仿生扑翼飞行器气动特性研究的工作效率,为以后同类型飞行器气动特性的研究提供了新的思路和方法。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2020年3期)2021-01-14
科学Fans(2019年4期)2019-04-30
劳动保护(2018年5期)2018-06-05
中国科技纵横(2017年2期)2017-03-24
中学课程辅导·教师教育(中)(2017年2期)2017-03-24
小朋友·快乐手工(2015年5期)2015-06-06
