高速公路分流区车流分布特性研究
2020-01-18 03:05:56陈相宇冷荣梦刘宇洁
物流技术 2020年1期
胡 荣,陈相宇,冷荣梦,刘宇洁
(1.上海理工大学 管理学院,上海 200093;2.浙江海洋大学,浙江 舟山 316022)
1 引言
随着经济快速发展,人们对交通的需求越来越大。我国作为高速公路里程位居世界第一的大国,高速公路的总里程数达14 万km。高速公路的通行能力和安全逐渐引起重视,由于高速公路不同路段的车流分布不同,提高路段通行能力需要从各车道分布特性方面着手。
针对高速公路车道分布特性,国内外不少学者在不同路段、不同情况进行了研究。李文权等[1]对高速公路合流区1车道上的车辆车头时距进行调查,运用数理统计方法,发现合流区1车道符合变化阶数的Erlang分布特征。何小洲等[2]对高速公路的施工区车辆运行特性、交通流特性进行调查,得出施工区行车道和超车道分布大致相似,车头时距在95%的置信度水平下符合移位负指数分布,合流车道的车头时距比一般正常路段小,离散性相对较大。段力等[3]在车道限制策略下对八车道高速公路交通流特征进行研究,发现车道1、2 的车头时距用M3 分布拟合效果较好,车道3、4用2阶爱尔朗分布或移位负指数分布拟合效果较好。林兰平[4]在研究双向八车道高速公路合流区交通特性时,对高合流区的车头时距等参数进行分析,得出各车道的车头时距用Erlang分布拟合较好。
综上所述,已有的研究虽然对高速公路不同区段的车流分布特征进行了研究,但是鲜有对高速公路的分流区车道分布特性进行研究。本文以南京市沪宁高速公路南京段分流区的某一基本路段为例,利用R软件,分车道对车头时距进行拟合分析,得出符合各车道的交通流分布形式,为分流区通行能力分析和交通安全预测等进一步研究奠定基础。
2 交通流分布形式
在高速公路上,交通流分布形式多种多样,同一段路在不同时间点上车流的分布形式各不相同。车流的分布形式则以车头时距分布模型呈现。车头时距是车流模型研究的基础[5],与交通流组成、驾驶行为密切相关,是反映道路通行能力和服务水平的重要依据[6],所以分流区交通流分布特性主要是通过研究车辆的车头时距,以此达到研究交通流车道分布的目的。对于车头时距的分布模型,国内外都做过大量的研究与探讨,目前比较有代表性的模型为以下几种:
(1)指数分布。车流量很小、车辆随机到达、各个车辆认为是相互独立的个体,有充分超车机会单列车流和密度不大的多列车流,可以认为车头时距也是随机的,概率一般服从(负)指数分布。

式中,P(h ≥t)为车头时距大于等于t 的概率;Q为交通流平均小时流量;t为所选定的时间间隔;e为常数(e=2.718 28…)。负指数分布和移位负指数分布应用最广泛[7-8],能够较好的与数据拟合。
(2)Weibull分布。这是一种参数较多的、普适性很高的连续型分布。在车辆到达非随机、超车现象比较严重的车流中,它能够很好地描述匝道连接段车头时距的分布规律。其分布函数为:
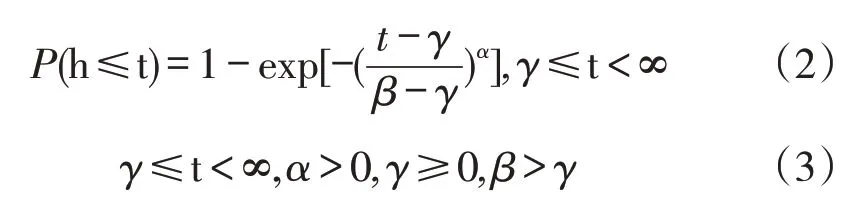
式中,P(h ≤t)为车头时距小于等于临界车头时距的概率;α为概率分布的形状参数,其大小决定曲线的形状,当α=1时即为负指数分布,α=3时,其与正态分布十分相似,α越大,分布范围越窄;β为概率分布的尺度参数;γ为概率分布起点参数。
(3)Gamma分布。在很多领域有广泛的应用,常用来估计零件平均寿命,是统计学的一种连续的随机函数,它适应性较强,可以结合不同的数据拟合出相应的曲线[9]。其概率密度函数的形式为:

式中,a 为形状参数,主要决定曲线的形状,b 为尺度参数,主要决定曲线的陡峭程度。伽马分布比较适用于交通流比较均匀,流量大的路段。
3 高速公路分流区车头时距分布特征分析
3.1 数据采集
常见交通流车头时距调查方法主要有人工记录法、数据监测设备记录法和视频录像记录法。其中,人工记录法是早期交通调查的主要方法,但因调查本身人力物力消耗较高,且调查过程中因人工计数常会导致各种误差,其使用的局限性相对较高。数据检测设备记录法则弥补了以往人工记录法在数据采集上的缺陷,广泛采用了先进的数据采集手段,其在应用上具有无法代替的优点。虽然数据监测设备数据获取量大、精确度高,但是价格十分昂贵。因此,视频录像方法应运而生,在具有高精确度的基础上,其还具有采集过程方便和成本较低的优势。视频录像主要通过实地录像记录交通流实况,在后期的录像处理后即可提取各种交通流参数数据。其中,提取数据参数的主要手段分为检测线法和跟踪法。检测线法是在视频内设置一个虚拟的检测线,采集通过检测区的车辆数据,而视频跟踪法是采用算法识别与跟踪通过视频中的车辆。综合上述三种数据采集方法,本文将采用基于视频录像记录的数据采集方法进行交通流车辆车头时距参数获取。
现选取南京市具有代表性的沪宁高速公路南京段分流区的某一基本路段为例,该路段是一个常见双向六车、单向三车道的分流区。数据采集时间点为某一工作日下午3点至5点,获取得到每个车道上车流的车头时距,按顺序,我们将最内侧车道定为第一车道,那么从内而外的车道分别是第二、第三车道,车道分布图如图1所示。

图1 车道分布示意图
3.2 数据分析与处理
由于交通流车道分布与车头时距分布密切相关,我们可以通过研究车头时距对交通流车道分布进行研究。车头时距一般可用前后车的车头间距除以后车速度来计算,同时它也代表着前后两辆车的前端通过同一地点的时间差。但是用前后车的车头间距除以后车速度来统计车头时距,工作量大且容易产生较大的误差,这里我们使用视频检测线法,在录像屏幕上取一个截面,使用秒表记录各车道上各车辆前端经过该截面的时间,用后车通过时间减去前车通过时间,即为各车辆的车头时距。基于视频录像记录处理数据共获取车头时距样本985 个,其中,第一车道的车头时距样本数量为349 个,第二车道的车头时距样本数量为339个,第三车道的车头时距的样本数量为297个,各个车道上车头时距的均值M,方差D,以及估计值其统计结果见表1。

表1 沪宁高速分流区车头时距统计结果
在统计实地采集数据的录像中,发现在分流区第二车道是车辆变道频率最高的车道,车辆大多会通过第二车道变换到第一车道直行或是第三车道驶入匝道,极少出现车辆从第一车道跨车道变换到第三车道的现象。分流区车头时距都相对较小,极少出现车头时距超过30s的现象,交通流处于一个自由流状态,没有出现因为车头时距较小而跟驰的现象。由表1统计的实测数据可知,三个车道的车头时距均值在8.4s 左右,第一车道的方差比第二、第三车道方差小,数据波动很小,较为稳定。统计车流处于分流区且处于匝道上游,第二、第三车道车辆变换频率较为频繁,方差大,与实际情况相符。三个车道车头时距频次图如图2所示。
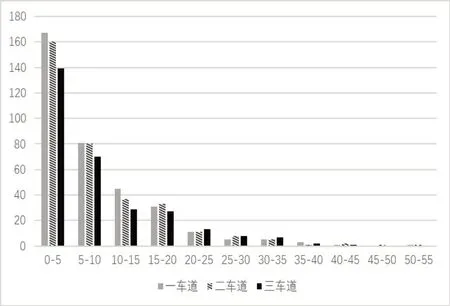
图2 三车道车头时距频次图
从图2中可以看出,各车道大部分车的车头时距集中在0-10s,说明大部分驾驶员处于安全驾驶状态,少部分车的车头时距在10s 以上,说明部分车辆需要变换车道,而且车头时距较长的主要集中在第三车道。
3.3 交通流数据拟合及对比
车头时距是表现交通流状态的重要参数,因此需要对车头时距这一重要参数进行离散分布以及拟合。本文将数据输入到R 软件进行处理,运用典型的Weibull 分布模型、Gamma 分布模型和指数分布模型对样本按不同车道进行拟合分布对比分析,见表2。其中,AIC(Akaike Information Criterion)为赤池信息准则,它是权衡估计模型复杂度和拟合数据优良性的一个标准,使AIC函数达到最小值的模型被认为是最优模型。BIC(Bayesian Information Criterion)是贝叶斯信息准则,它与AIC相似,用于模型选择,但是BIC 的惩罚项比AIC 惩罚项大,考虑了样本数量,样本数量过多时,可有效防止模型精度过高造成的模型复杂度过高。
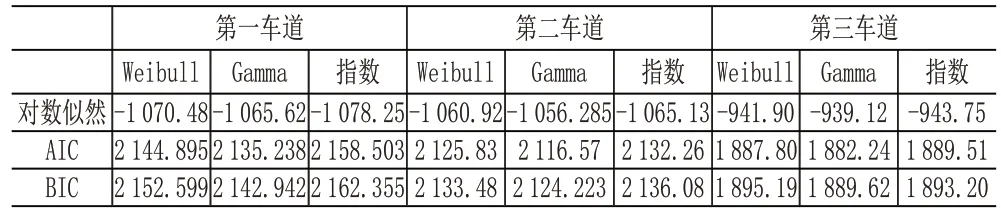
表2 各车道车头时距拟合效果
由于BIC 比AIC 惩罚项大、指标评价精度高,当AIC与BIC冲突时,我们以BIC数据为主,因为它的权衡力度更强。通过表2对三个车道分布进行对比,我们能够确定第一车道大致服从Gamma 分布,第二车道也服从Gamma分布,第三车道则服从于指数分布。
4 结论
本文基于南京市沪宁高速公路南京段分流区的实际数据,分析交通流参数后,处理得出了沪宁高速公路双向六车道路段中,其分流区交通流各车道分布特性是:第一车道与第二车道的分布服从于Gamma 分布,第三车道分布服从于指数分布。该特性可以为新建双向六车道高速公路交通安全设施的设置和通行能力的预测提供参考,也可以拓展应用到交通仿真优化中。本文也有一些不足之处,仅对某一时段的交通量进行研究,没有对一天中的各个时间段分流量进行车道分布特性研究。在今后的研究中,可以按交通量分类采集不同时间的数据对车道分布进行更加深入地研究。
猜你喜欢
人类工效学(2021年5期)2022-01-15 05:06:30
军事文摘(2020年24期)2020-02-06 05:56:58
绥化学院学报(2019年10期)2019-10-12 01:08:12
心理科学进展(2018年8期)2018-02-21 18:32:04
中国老区建设(2016年4期)2017-01-15 13:53:45
大学数学(2016年5期)2016-12-19 07:23:07
大学数学(2015年5期)2016-01-28 03:08:03
心理科学进展(2015年5期)2015-02-26 07:07:54
大连交通大学学报(2012年2期)2012-07-02 03:25:54
赤峰学院学报·自然科学版(2011年12期)2011-10-20 05:58:26