
土壤水探测天线扫描机构设计及精度测量方法
2020-01-15 05:31李宁杰邙晓斌钱志鹏刘明利
航天制造技术 2019年6期
李宁杰 刘 瑞 邙晓斌 钱志鹏 刘明利
(上海航天电子通讯设备研究所,上海201109)
1 引言
水是最重要的陆地遥感参数,陆地地表水和土壤水的综合监测对拓展土地、地矿、农业等领域具有重要的意义。国外学者对微波遥感土壤湿度的研究做了大量工作,20 世纪70~80年代以野外车载和航空微波遥感实验为主[1],旨在发展微波遥感土壤湿度算法,并研究其它因子的影响;90年代以发展实用的卫星微波遥感土壤湿度为主[2],检验以往算法的适用性,并用于大尺度的土壤湿度制图,为区域及全球水文模型,陆面过程模式乃至全球气候模式提供必要的土壤湿度信息。典型微波遥感探测器包括SMOS[3]、SMAP[4]等。
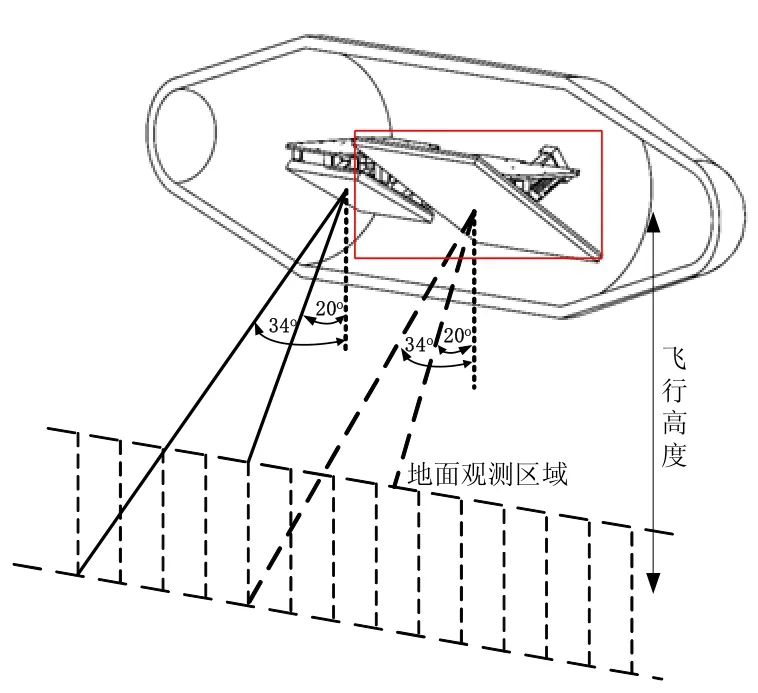
图1 机载天线安装方案
频段越低,土壤水探测敏感度越高,因此国内外对土壤水探测均采用频段较低的L 波段[5]。为了通过机载观测模拟陆地水资源的微波遥感参数,设计了大型外场试验。在外场试验中为了获得被动遥感更大的对地覆盖面积,设计了带有电动缸的扫描驱动机构,使天线的扫描范围增大,机载天线安装方案如图1所示。为了验证得到扫描驱动机构的精度,用三坐标测量仪对其精度进行了测量。
2 扫描驱动机构设计
2.1 扫描驱动机构技术性能指标
根据外场试验的目的和要求,对扫描驱动机构提出了很多高性能的技术指标,如扫描重复指向精度、扫描定位指向重复精度等。扫描驱动机构的主要技术性能指标如表1所示,其中,扫描驱动机构的运动范围为20°~34°,20°为扫描初始零位,27°为扫描中点位置,34°为扫描终止位置,其角度扫描范围如图2所示。
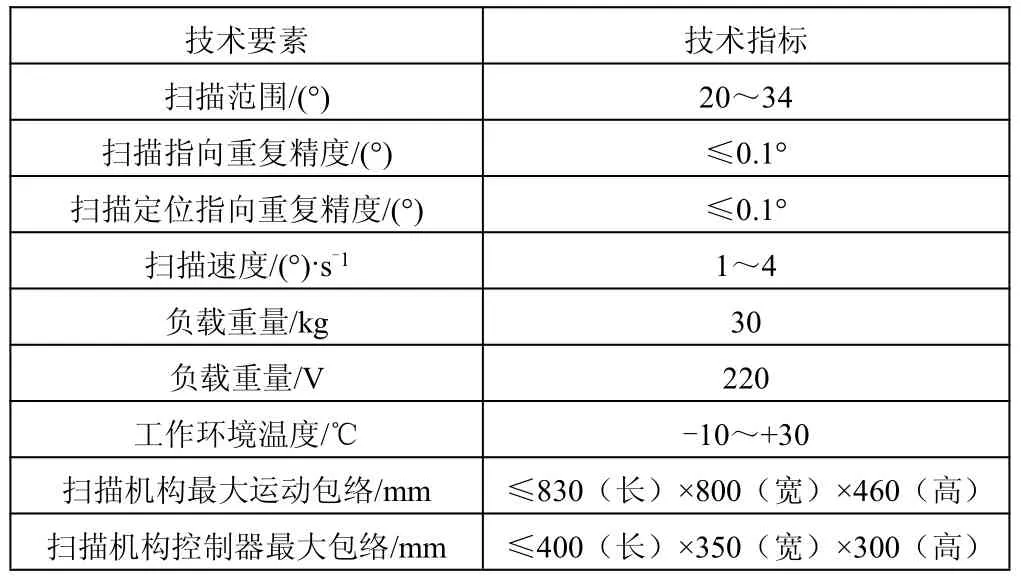
表1 扫描驱动机构技术性能指标
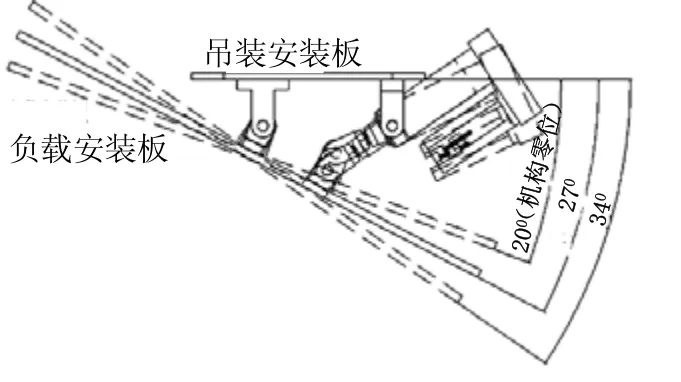
图2 扫描驱动机构角度扫描范围
2.2 扫描驱动机构整体设计
根据扫描驱动机构的设计要求和技术指标,将整个系统划分为两个子系统,分别为:机械摆动部分和控制系统部分,扫描驱动机构的结构整体布局如图3所示。机械摆动部分主要由伺服电动缸、吊装安装板、负载安装板、铰链机构组成。其中,吊装安装板和负载安装板采用铝合金材料,质量轻,结构刚度强;铰链机构采用不锈钢材料,配合紧密,转动间隙小。控制系统主要由上位机、控制柜、角度传感器组成。其中,上位机采用性能稳定的地测设备;控制柜中的PLC采用欧姆龙多能性PLC,控伺服驱动器采用MOTEC通讯型驱动器;角度传感器采用欧姆龙高精度角度传感器。下文主要对伺服电动缸设计和控制系统设计做详细介绍。
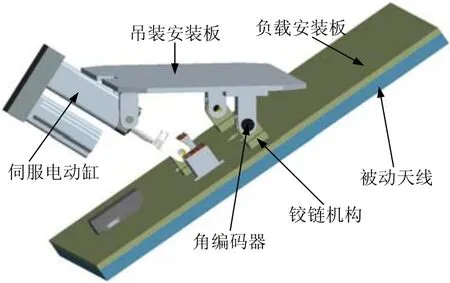
图3 扫描驱动机构整体结构设计
伺服电动缸是由伺服电动机和丝杠组成的一体化产品,伺服电动机通过同步带与丝杠连接,将电机的转动转换为电动缸的直线往返运动[6]。伺服电动机具有精度高、易控制等优点,通过丝杠可以转化为电动缸的高精度运动,准确的速度、位置和推力。
根据驱动扫描机构的整体结构位置关系,根据运动的实际情况,将吊装安装板、负载安装板和电动缸整体简化为三角形结构来表示相对的位置关系,具体如图4所示,顶点1 表示电动缸与吊装安装板之间的铰链机构,顶点2 表示电动缸与负载安装板之间的铰链机构,顶点3 表示吊装安装板与负载安装板之间的铰链机构。
根据驱动扫描机构简化位置关系,由余弦定理可以得到电动缸的总长与扫描角度之间的关系式为:

式中:L为电动缸的总长,α为驱动机构转动角度。
当驱动扫描机构扫描角度为20°时,电动缸伸出量最小;当驱动扫描机构扫描角度为34°时,电动缸伸出量最大,因此可以算出电动缸所需行程:
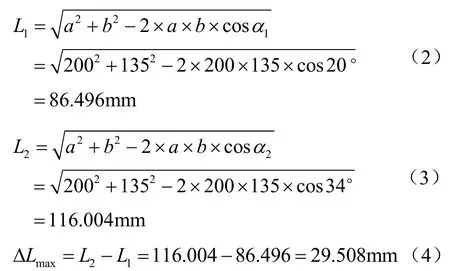
式中,L1为20°时,电动缸的总长;L2为34°时,电动缸的总长;ΔLmax为电动缸所需行程。
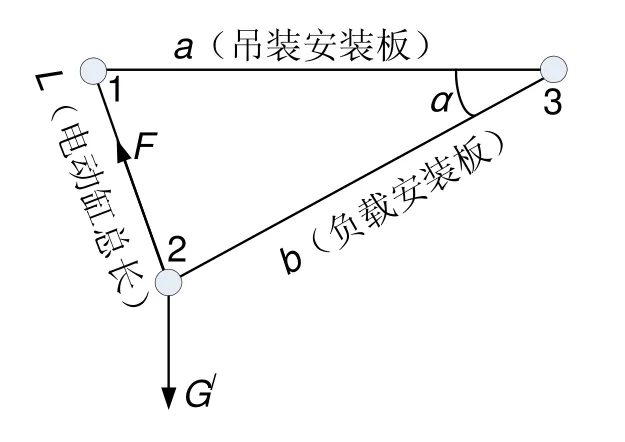
图5 电动缸输出力示意图
被动天线为10kg,负载安装板为10kg,背面单机重1kg,电动缸所需输出力为:

式中,F为电动缸输出力。
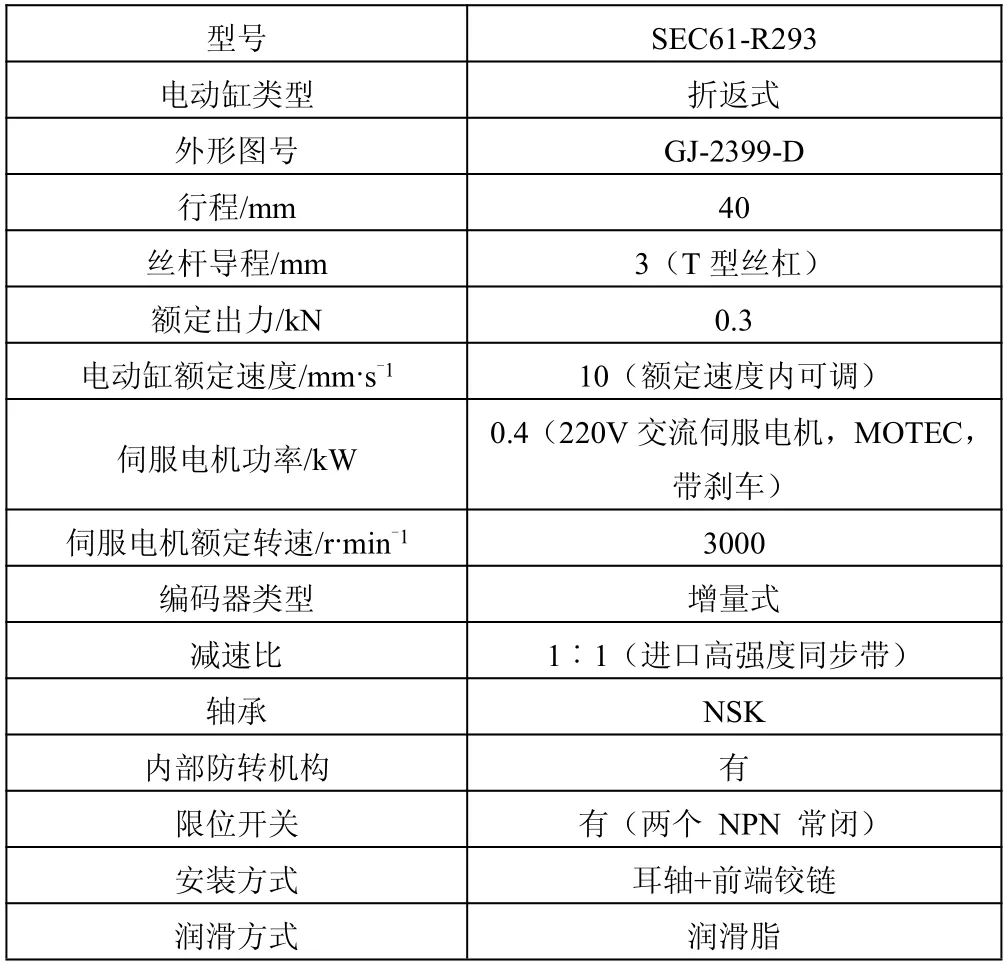
表2 伺服电动缸参数表
因为挂载样机要整体安装在密封舱内,因此结构设计包络尺寸越小越好。电动缸有直线式、折返式和垂直式三种,考虑到安装空间和运动精度,选用折返式电动缸。结合电动缸所需行程、所需输出额定力,选取型号SEC61-R293 的电动缸,可以满足设计要求。此型号电动缸重复定位精度为正负0.05mm,带自锁功能,采用MOTEC 高精度伺服电机,具体参数如表2所示。
电动缸总长度包括电动缸本体固定长度加上电动缸伸长量,有公式:式中,L0为电动缸本体固定长度,ΔL为电动缸伸长量。

通过式(1)和式(6)可得,电动缸伸长量与转动角度之间的关系式为:

式中,a、b、L0为已知量,因此可以直接计算电动缸伸长量与转动角度之间的关系。PLC 根据上式可以计算出扫描驱动机构摆动角度与电动缸伸出量之间的关系,从而通过程序控制机构的转动角度。同时,加装在转动轴上的编码器可以实时反馈机构的转动角度,从而进一步保证驱动机构的角度控制精度。
设计完成的控制系统可以实现三个主要的功能:驱动机构可以根据上位机指令进行连续的扫描,转动角度范围和转动速度是可以设置的;驱动机构可以根据上位机指令在某个特定的角度进行定位,实现天线的定角度观测;角编码器可以按照上位机的读取指令反馈驱动机构的扫描角度,由上位机实现实时采集记录扫描驱动机构的转动角度值。
3 扫描驱动机构精度测量
3.1 精度测量方法
利用三坐标测量仪,在被动天线安装板和吊装安装板每块板各取5 个点,拟合成两个平面,得到被动天线安装板和吊装安装板的平面精度,再测量两平面间的夹角,即被动天线的转动角度,得到显示值和实测值,以此判断驱动机构的精度,测量过程如图6所示。通过对机械零位(20°)的标定,完成机构基准的确定;然后通过对机构27°、34°的标定,完成机构最终的标定。如果在重复测量中,实测值和编码器值显示不一致,通过软件进行补偿,直至实测值和显示值在误差允许范围内。
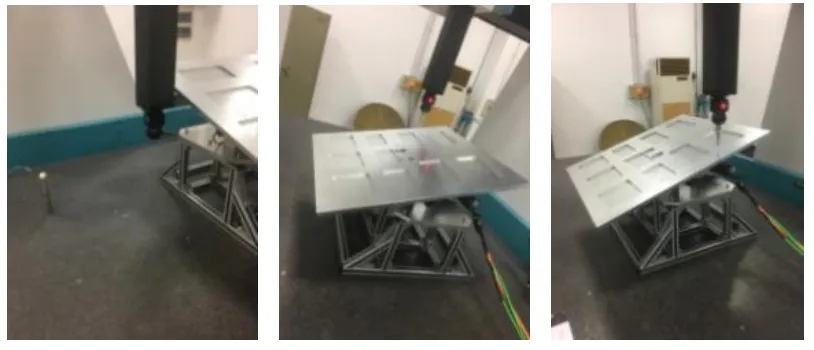
图6 扫描驱动机构精度测量
安装板平面度测量结果:被动天线安装板:0.03mm(技术指标:≤0.2mm);吊装安装板:0.04mm(技术指标:≤0.2mm)。
3.2 扫描驱动机构精度测量过程及结果
3.2.1 机构零位20°的标定
a.通过控制器调整机构使得被动天线安装板与吊装安装板夹角在20°附近,并进一步微调后,三坐标实测值为19.9967°,此位置标定为机构的机械零位,编码器显示设置为20°;
b.控制器关机再开机零位值角度编码器读数为19.999°;
c.控制器控制机构往返运动一个周期后返回零位,三坐标的实测值为19.43950°,此时通过软件补偿回程间隙0.56050°,三坐标实测值为19.99960°(主要由电动缸丝杆,铰链,轴承等间隙累积引起);
d.机构继续做一个往返运动周期后三坐标实测值为:19.9978°;
e.误差满足定位精度≤0.1°要求,机构零位20°标定位完成。
3.2.2 机构27°的标定
控制器给予7°的角度增量,标定机构的定位角度27°,进行了2 次标定,标定值见表3。

表3 机构定位角度27°标定值 (°)
结果显示,误差满足定位精度及重复定位精度≤0.1°的要求,机构定位角度27°标定完成。
3.2.3 机构34°的标定

表4 机构定位角度34°标定值 (°)
控制器给予14°的角度增量,标定机构的定位角度34°,进行了2 次标定,标定值见表4。
结果显示,误差满足定位精度及重复定位精度≤0.1°的要求,机构定位角度34°标定完成。
3.2.4 机构角度标定后复测结果
在对控制器进行关机再开机,机构往返运动几个周期后,复测上面的机构角度标定结果,结果见表5。

表5 机构角度标定后复测结果值 (°)
结果显示,在机构返程时,27°的回程间隙稍大,需要在软件中进行补偿,其他均满足定位精度及重复定位精度≤0.1°的要求。
3.2.5 补偿27°回程间隙后复测结果
在控制器软件中对27°回程间隙进行补偿后,机构按34°→27°→20°→27°的顺序进行扫描,复测结果见表6。

表6 机构定位角度27°复测结果 (°)
结果显示,补偿结果满足定位精度及重复定位精度≤0.1°的要求。
3.3 扫描驱动机构验证试验
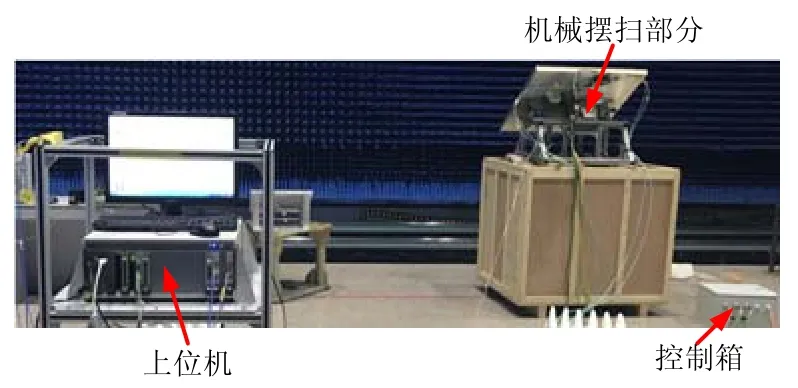
图7 扫描驱动机构的试验系统
为了验证土壤水探测设备的整体性能,在天线暗室搭建了实物样机进行了试验前测试,其中包括了扫描驱动机构的测试试验,整体系统实验如图7所示。将吊装安装板安装在铝合金框架上,被动天线安装在负载安装板上,上位机安装在舱内设备框架上,控制箱是直接固定到飞机舱内的。用电缆将电动缸与控制箱连接,给电动缸传输命令和供电;上位机和控制箱用电缆连接,给控制箱传输命令,控制箱直接连接220V 的电源供电;角编码器与上位机直接用电缆连接,上位机可以实时观测和记录扫描驱动机构的转动角度。
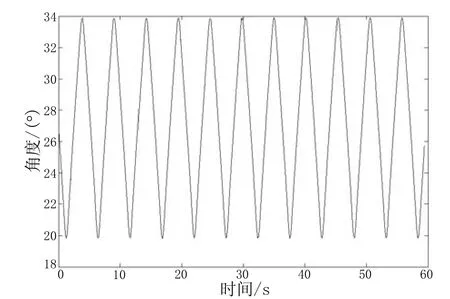
图8 驱动扫描机构转动角度图
上位机通过给控制箱传输指令控制伺服电动缸的运动,同时实时采集电动缸转动角度数据,通过数据处理,将原始数据转化为图的形式,实验结果如图8所示。通过图8可以看出,驱动扫描机构根据预先设计运动方式做周期运动。最小采集数据为19.905°,最大为33.960°,满足定位精度≤0.1°的要求。观测每个周期的最小角度值皆在19.905°~20.00°之间,每个周期的最大角度值皆在33.910°~33.960°之间,满足重复定位精度≤0.1°的要求。
4 结束语
本文设计的土壤水探测被动天线的扫描驱动机构,实现了20°~34°范围运动扫描,定位精度及重复定位精度≤0.1°,满足探测使用需求,圆满地完成了外场挂载试验,对以后类似的挂载试验具有指导意义,同样适用于其他需要类似机构的场合。所涉及的驱动机构精度测量方法,完成了所设计的扫描驱动机构转动角度精度的准确测量,对驱动机构转动精度测量提供了参考。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2021年4期)2021-08-29
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
汽车维修与保养(2020年11期)2020-06-09
智族GQ(2019年9期)2019-10-28
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
智富时代(2019年2期)2019-04-18
