
工艺参数对便携式三维激光扫描测量精度影响的试验研究
2020-01-15 05:30宋雨彪马兆利胡文浩董李扬
航天制造技术 2019年6期
宋雨彪 马兆利 胡文浩 董李扬
(北京航星机器制造有限公司,北京100013)
1 引言
近年来,三维激光扫描技术已广泛应用于测绘、逆向工程、文物修复等领域[1]。多位学者针对不同类型三维激光扫描系统的测量精度开展了大量研究。文献[2]分析了机载激光扫描系统的系统观测误差和系统集成误差,认为通过动态差分技术和提高硬件设施提高精度可以大幅提高系统精度;文献[3]研究了地面激光扫描系统误差及控制方法,认为影响扫描精度的主要因素为控制网精度、标靶测量精度、扫描距离及目标物反光率,在此基础上文献[4~9]将地面激光测量系统误差的影响因素分为三类:仪器误差、目标物体反射面相关误差、外界环境条件。文献[10]认为影响便携式扫描系统误差的主要因素为扫描仪内部光学部件的影响、CCD 分辨率的影响、激光光强与光斑形状的影响、反射面颜色的影响和边缘效应的影响。
上述研究结果表明系统误差、仪器精度、目标物体材料特性、测量方法和外界环境等因素对三维激光扫描系统的测量精度均有显著影响,但关于工艺参数对扫描精度的影响缺少研究,因此本文以Handyscan700 便携式三维激光扫描仪为研究对象,简要介绍了三维激光扫描仪测量原理及特点,结合某航天产品舱体实例,着重分析工艺参数(扫描入射角度、靶点密度、测量距离)引入的误差,重点探究了工艺参数对测量精度的影响规律,并得到了最优工艺参数组合,为便携式三维激光扫描仪作业和进行点云数据处理时降低误差影响提供了理论基础和事实依据。
2 便携式三维激光扫描仪测量原理及特点
2.1 测量原理
便携式三维激光扫描仪应用激光三角测距法采集目标体三维信息,其基本原理[9]是利用具有规则的几何形状激光束或模拟探针沿着被测物体表面连续扫描,利用被测物体表面漫反射,反射的光点或者光带在光路中的图像传感器上成像,通过三角形法则直接计算出被测点的三维坐标。三角测距法分为直射式和斜射式,与斜射式测量法相比直射式测量法具有结构紧凑空间利用率高、测量盲区小、测量结果有位移性等优势,更适合测量多特征异形复杂曲面,本文所使用的三维激光扫描仪属于直射式,其测距原理如图1所示。

图1 直射式三角测量原理图
三维激光扫描仪由激光发生器、聚透镜、目标表面、接收透镜和光电感应器五部分组成,激光发生器射出的光线经聚透镜聚焦后垂直照射到被测物体表面,入射光点处的散射光经接收透镜后在光电位置探测器敏感面上成像,当目标体空间位置或表面高度发生变化时,入射光点沿入射光轴移动,光电感应器敏感面上的像也会有对应的位移增量[11~15],由三角几何关系和成像关系可知:
将上式变换,得到被测点A的高度值为:

当γ=90°时,上式可变换为:

式(3)为直射式三角测距法目标体表面上点的高度计算关系表达式,为确保测量范围内的点都能准确在光电感应器敏感面上成像,夹角γ必须满足:

其中,W是横向放大系数。
2.2 主要特点
相比于全站仪单点测量方式,便携式三维激光扫描仪是全自动、高精度扫描测量仪器,可以获得全面的、连续的、关联的全景点三维扫描坐标,其主要特点:a.高精度:实际操作条件下的高精确性,体积精度达0.02mm+0.06mm/m;b.直观性:在VXelements软件中实时更新扫描结果;c.适用复杂环境:自带LED光源,不受光线影响;d.高效率:扫描速度可达500000次测量每秒。
3 工艺参数引入的误差探究
工艺参数对三维激光扫描结果的影响主要分为四个方面,即测量距离、入射角度、靶点密度以及标靶位置和过渡方式,鉴于标靶位置和过渡方式对扫描结果的影响是固定的,本文后续以测量距离、入射角度和靶点密度三个工艺参数为关键因素进行研究,通过正交试验法探究工艺参数对测量精度的影响规律,进而获取最优工艺参数组合。
3.1 正交试验表设计
本文以某实际产品为对象采用正交试验法进行三维激光扫描试验研究,以测量距离、入射角度和靶点密度为试验因素,采取三因素四水平正交表,具体试验因素与水平如表1所示。
本正交试验利用单位现有设备Creaform Handyscan700 便携式三维激光扫描仪、SanLiang 万能角度尺和联想笔记电脑Y480 开展。
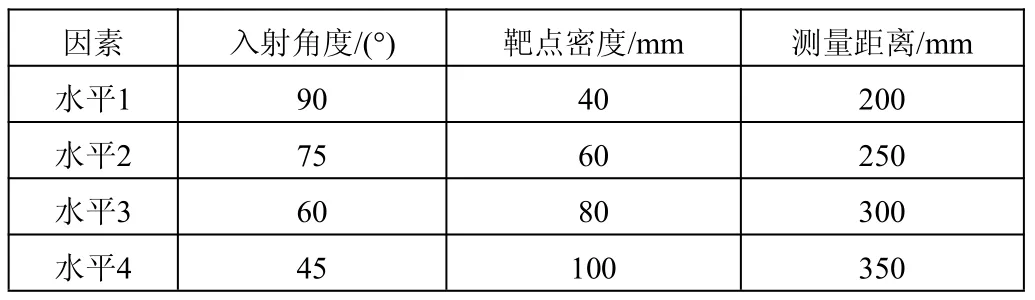
表1 试验因素与水平表
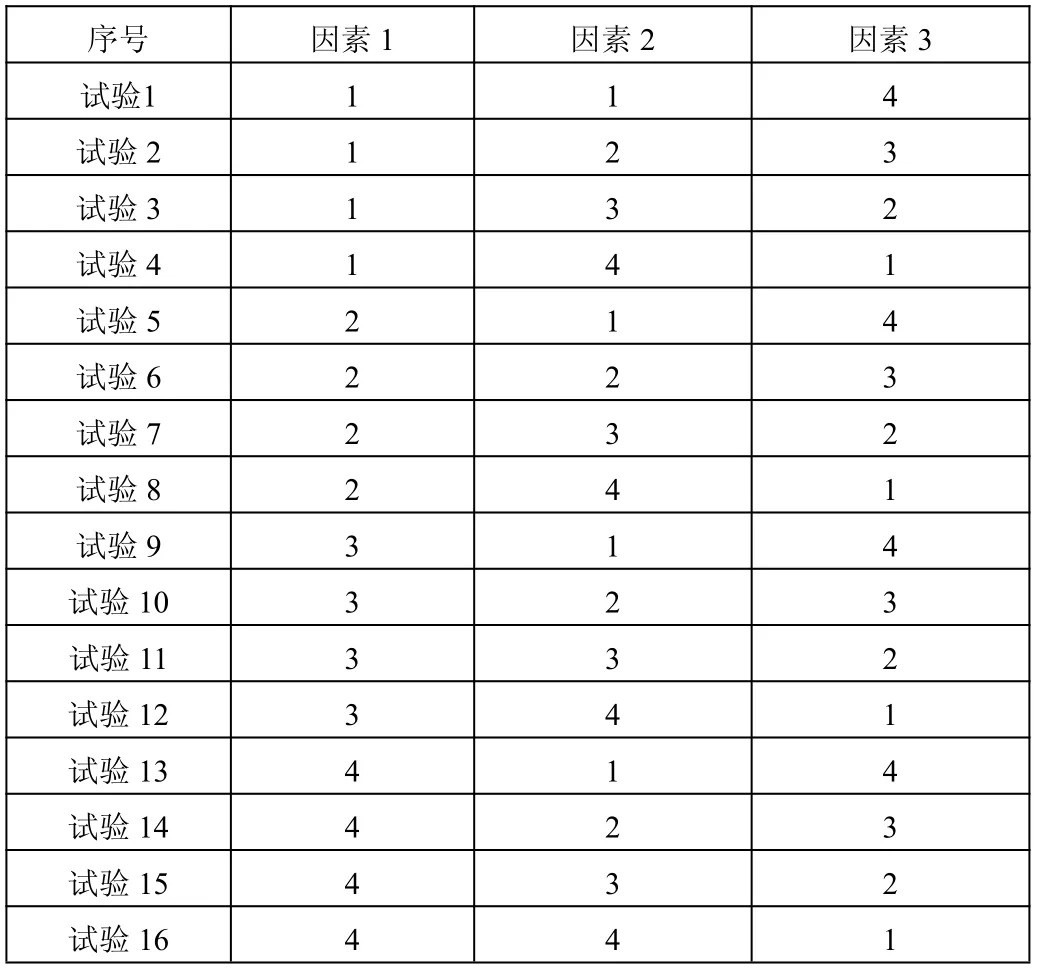
表2 三因素四水平正交试验表
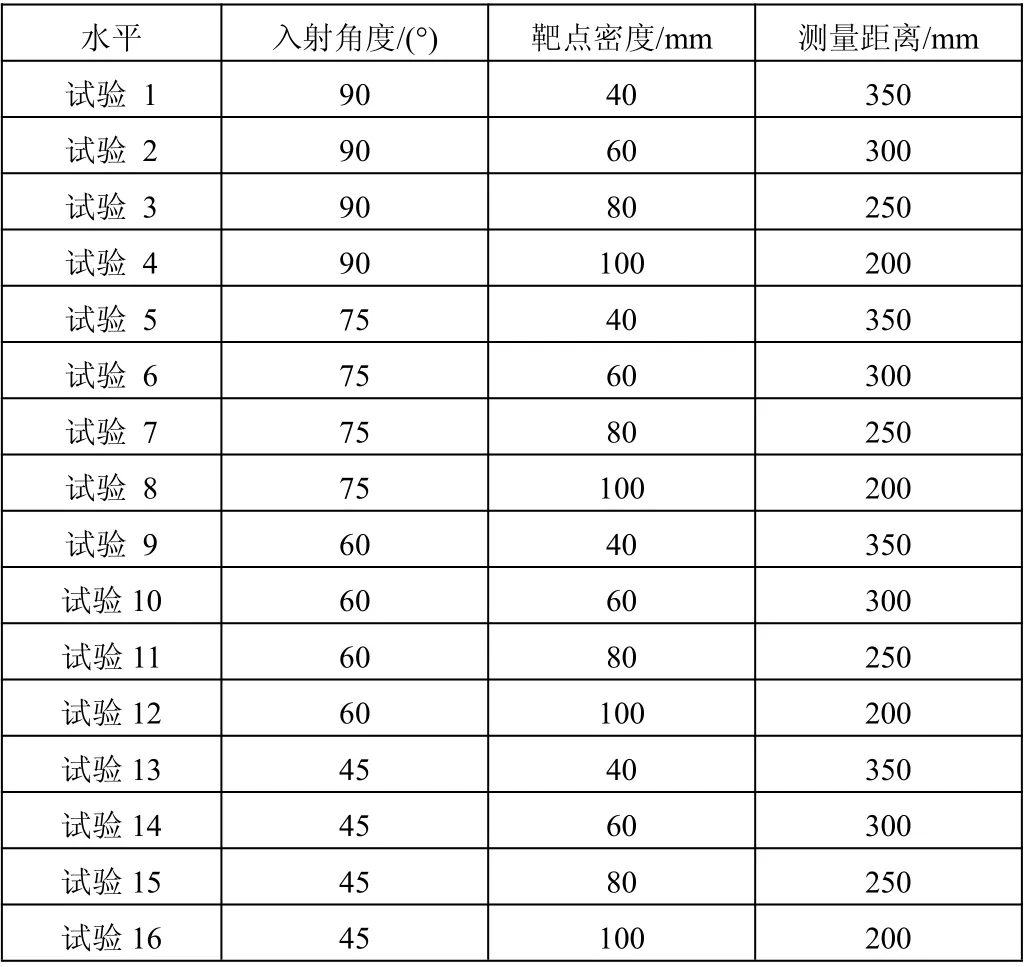
表3 三维激光扫描试验参数
3.2 试验过程
3.2.1 设备校准和参数配置
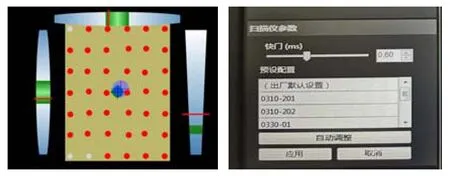
图2 校准及参数配置
设备校准和参数配置是三维激光扫描仪根据目标体表面反光特性进行快门自适应调整的过程,合理的快门可以有效提高扫描精度,调整过程界面见图2。
3.2.2 贴黑白反光标点并扫描
合理设置靶点位置和过渡方式能够有效提高扫描精度。工件变换位置后,应保证不少于四个公共标靶,合理增加靶点数量可以有效提高后期拼接精度。但是,靶点位置应避免定位点过密、线形排列或有规律地分布现象,如图3所示。
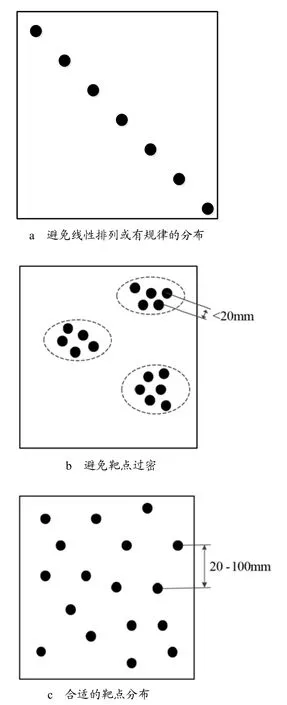
图3 粘贴靶点位置及注意事项
扫描具有多个特征面的零件时,需要设置过渡面,过渡面的设置可以有效降低人为扫描误差。此外,扫描过程中需要注意将过渡点删除,否则扫描所获得的三维模型存在过渡靶点位置区域扫描数据缺失的现象,对比如图4所示。

图4 扫描数据对比图
3.3 试验结果分析
对采集到的试验数据采用固定点周围取九点计算标准差,如果正值数大于负值数时,标准差取正,反之为负,这种初步处理数据方式所得数据称之为等价标准差,本文等价标准差即为等价误差。为描述试验结果优劣,采用打分制将试验结果量化,打分标准如表4所示。根据扫描结果与理论模型的误差评级对扫描质量进行打分,如表4、表5所示。
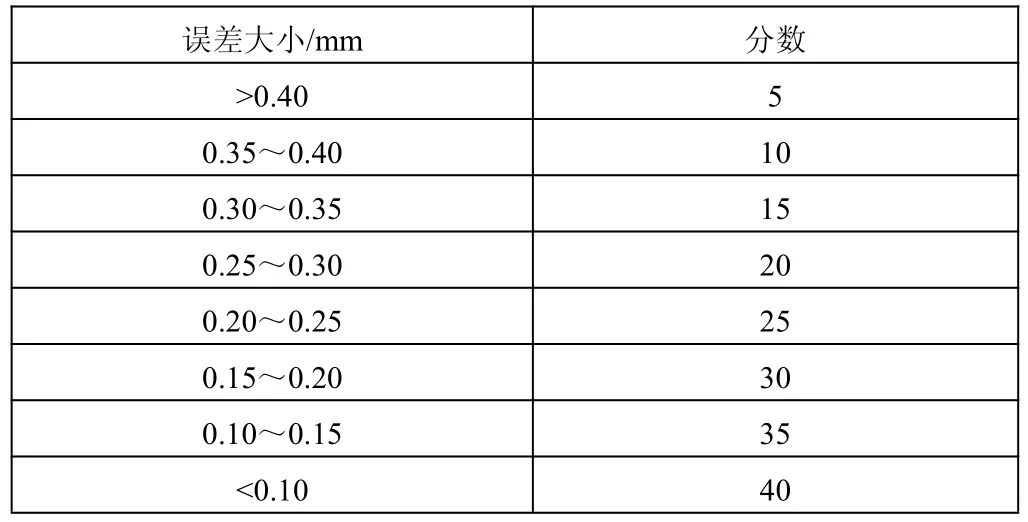
表4 打分标准

表5 扫描误差分数表
3.3.1 直观分析
采用正交试验极差分析方法对三维激光扫描结果进行直观分析,试验结果如表6所示。表中的Li=,L1、L2、L3和L4分别代表各个因素在水平1/2/3/4下的三维扫描质量分数,经分析可以得到工艺参数测量距离、和靶点密度对扫描质量的影响程度相同。质量分数越高代表扫描质量越好,因此选取每个工艺参数中使Li取最大值的水平即为最优参数组合,即得到较高扫描质量的工艺参数组合为入射角度90°、靶点密度60mm、测量距离300mm。效应曲线图可以直观形象的反映出正交试验直观分析结果,如图5所示。
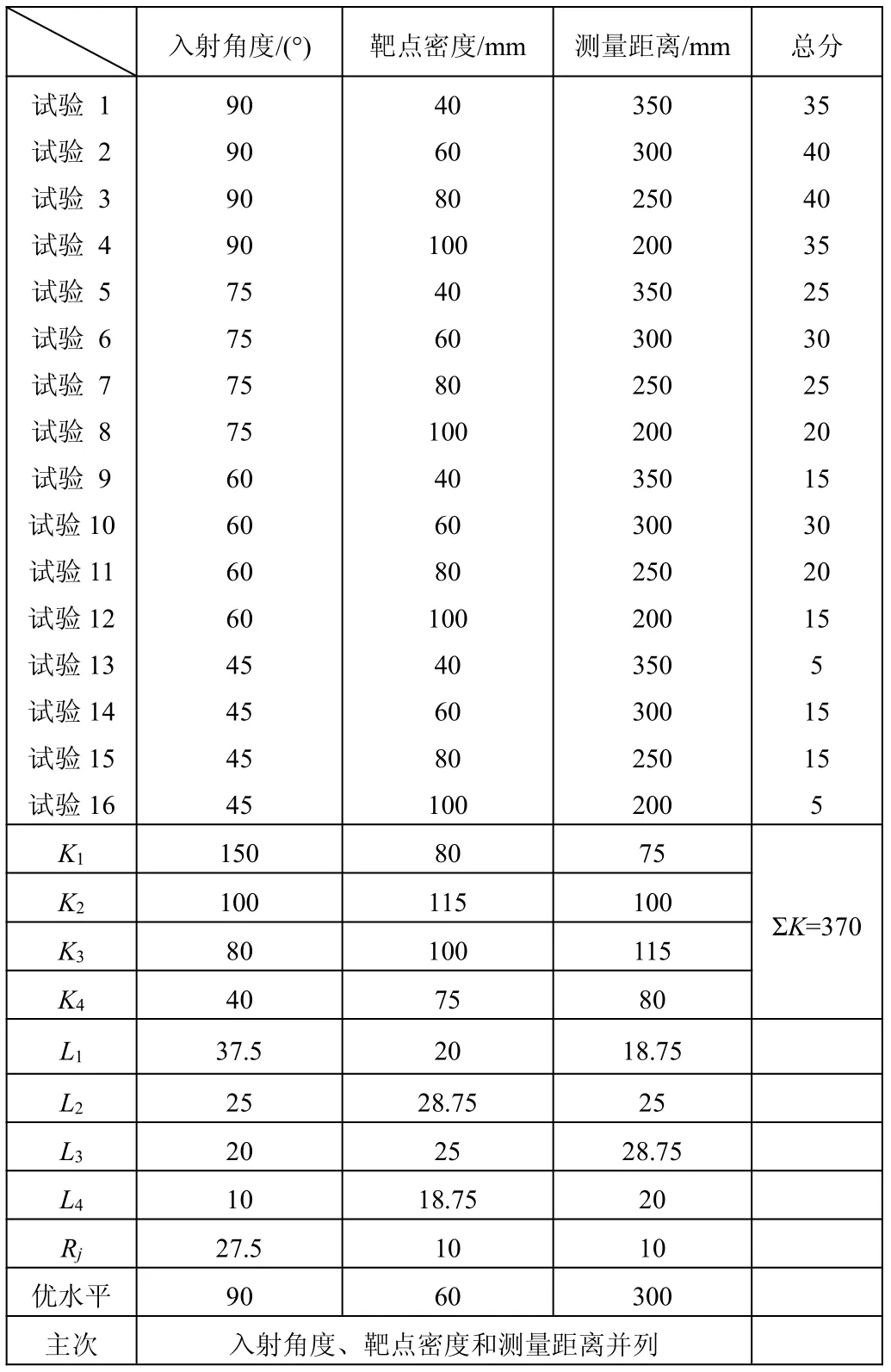
表6 试验结果直观分析表

图5 各因素分数直观分析效应图
3.3.2 方差分析法
对数据进行方差分析,置信度分别取90%、95%、99%,分析结果如表7所示,三个因素的F比在置信度为95%时均大于临界值3.86,即达到了显著水平,这说明正交试验是合理可信的。

表7 正交试验结果方差分析表
3.4 试验验证
对比试验以上文所用的某实际产品为对象,试验安排如表8所示,试验结果如表9和图6所示。
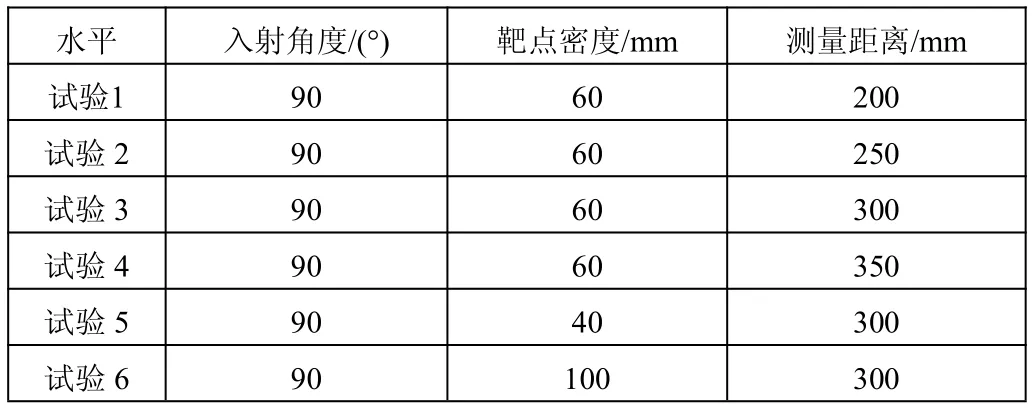
表8 对比试验参数

表9 扫描误差分数表
通过图6所示各因素分数直观分析发现试验3和试验5并列为最高评分,但试验3与试验5相比,前者比后者靶点密度大扫描质量基本一致,从经济性角度和操作便捷性角度考虑,试验3参数组合即入射角度90°、靶点密度60mm、测量距离300mm为最优组合。
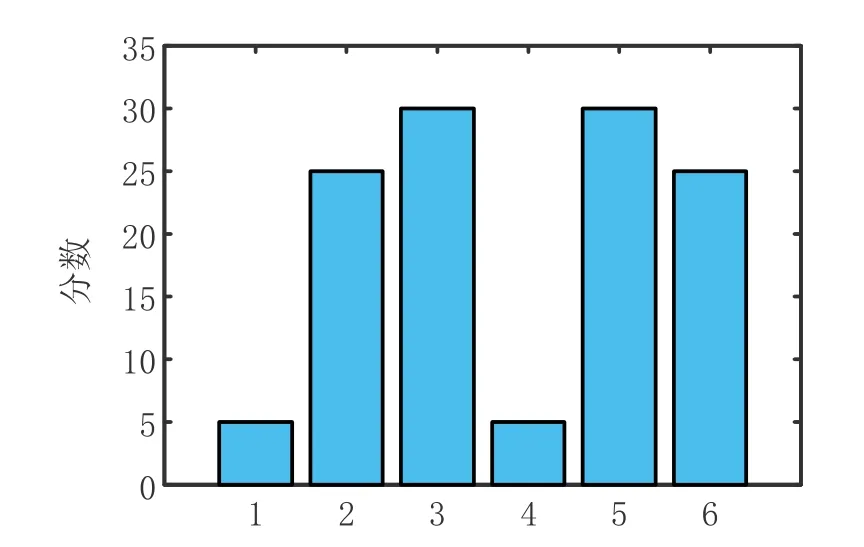
图6 各因素分数直观分析效应图
4 结束语
本文在已有研究的基础上,通过正交试验法重点探究了入射角度、靶点密度和测量距离等工艺参数对便携式三维激光扫描仪扫描质量的影响规律,提出了采用质量分数法来评价扫描质量,最终获取了最优工艺参数组合。试验结果表明:入射角度对扫描质量影响最大,靶点密度和测量距离对扫描质量的影响程度相同,且三者之间无耦合作用,各工艺参数的最优组合为入射角度90°、靶点密度60mm 和测量距离300mm。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
体育科技文献通报(2022年3期)2022-05-23
安徽医科大学学报(2022年4期)2022-05-12
教育周报·教研版(2021年14期)2021-06-20
世界中医药(2021年22期)2021-01-03
中学物理·高中(2017年1期)2017-04-25
中国新通信(2017年5期)2017-04-13
中国动物保健(2015年4期)2015-10-21
现代营销·经营版(2015年3期)2015-04-20
能源研究与信息(2014年3期)2014-10-30
