
工程浮吊浅水系泊定位时域运动分析
2019-12-26 06:05何晓宁刘亚东
船舶 2019年6期
何晓宁 刘亚东
(1.上海交通大学 船舶海洋与建筑工程学院 上海200240;2.招商局邮轮制造有限公司 海门226116)
引 言
工程浮吊一般用于码头和遮蔽海域的海工设备安装、海上风电场安装、桥梁吊装、海上事故救援等,是海洋工程重点装备,而船舶系泊定位的可靠性同吊装安全息息相关,因此对于船舶在外力作用下的运动研究和预测非常重要。
以锚链系泊工程浮吊为研究对象的文章不多,其中万浩、杨新权等[1]完成了12 000 t 回转浮吊的水动力分析,得到了吊物运动和船体运动随不同参数变化的规律,对作业环境水域限制进行了分析;刘丹等[2]分析了锚泊定位的大型挖斗船的时域耦合分析,对挖斗操作过程中的系泊张力进行了分析。根据已查阅的资料,国外针对浮吊的研究极少,对深水海洋装备和多船关联耦合研究较多。本文研究对象为扒杆式工程浮吊,作业区域主要是港口和码头浅水区域(<40 m),考察在此类环境条件下的船舶运动特征,为船舶操纵提供指导依据。
本船船体主体为箱型,首尾呈楔形,吊臂为扒杆式,由人字架、臂架支架和主臂架组成(如图1)。

图1 浮吊效果图
该船的主尺度见表1。
系泊系统采用8 台系泊绞车,连接钢丝绳、锚链和锚构成,典型的系泊状态为8 点发散型布置,见图2。
本文对浮吊在系泊状态下受到的外部波浪力、风流力和系泊力进行频域分析,求得水动力参数并建立运动方程,运用数值模拟方法求解运动微分方程,得到浮吊在外力和系泊力联合作用下的时域运动;然后对结果进行分析,总结浮吊运动特性,为吊装稳定性和安全操作提供指导和依据。

表1 浮吊主参数表

图2 浮吊系泊缆布置图
1 理论模型与参数选取
1.1 坐标系
坐标系采用右手坐标系,也是常用的船舶坐标系,如图3 所示。

图3 船舶坐标系示意图
1.2 风流力载荷
风流力载荷考虑为定常载荷,采用经验公式计算。
1.2.1 流力的计算公式

式中:F为水流力,N ;Cf为摩擦力系数,为无量纲数;ρ0为流体密度,kg/m3;u为水流速,m/s;A为受流力投影面积,m2。
本例中横向水流力计算:

纵向水流力计算:

式中:流速u取1.1 m/s;平板物体形状系数Cf取1.0;A= 522 m2; 密度ρ0取102.4×10-3kg/m3。
1.2.2 风载荷的计算公式

根据本船的作业条件,海况采用蒲式5 级以下,风速取≤10.7 s、流速取≤1.1 m/s、平板物体形状系数CS取1.0,且认为风流同向,并且和波浪运动方向相同为最危险情况。
根据浮吊的几何形状,可以计算横向受力如表2。
其他方向可以此类推。

表2 横向风力计算表
1.3 波浪载荷
1.3.1 势流理论和波浪力计算
本文采用势流理论对波浪力进行计算,并采用数值分析的方法求解船舶运动响应。采用势流理论求解大尺度结构物所遭受的水动力载荷,假设结构物附近的流场是无黏性的(即无旋有势),速度势是空间位置和时间的函数,应满足连续性方程,即速度势必须满足拉普拉斯控制方程,见式(3):

它在直角坐标系中的表达式见式(4):

拉普拉斯方程和相应的边界条件都是线性的,可应用叠加原理把速度势加以分解。令速度势为

1.3.2 波浪谱
不规则波浪采用JONSWAP 波浪谱进行模拟,JONSWAPS 谱适用于有限风区的情况:

式中:ωp为谱峰频率,Hz;g 为重力加速度,m/s2;α为广义菲利普常数=γ为谱峰值参数。

根据本船所处的环境条件,波普选用Jonswap谱:谱峰周期取0.7s,有义波高取1m;波浪谱图如图4 所示。考虑到船的对称性,考察如下5 个浪向:0°(迎浪)、45°、90°(横浪)、135°、180°(随浪)。

图4 波谱图
1.4 系泊力模拟
采用悬链线理论对系泊力进行简化处理(如图5),悬链线系泊缆的平衡方程是:
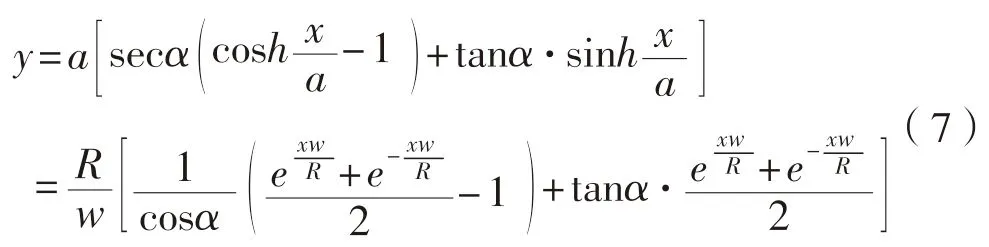
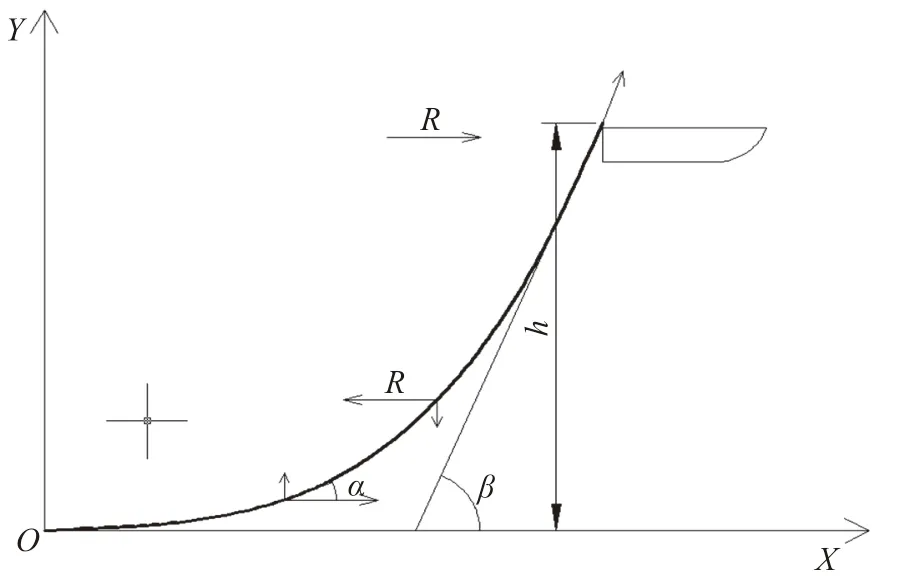
图5 悬链线示意图
式中:y为水深,m;R为作用在船上的外力,N;x为锚泊点至挂链点的水平距离,m;α为起锚角,°;w为每米链重,kg/m。
从以上公式中可以看出y是R,x,α,w的函数,即已知R,x,α,w就可以求得水深y。
系泊力根据目前的锚链配置,进行系泊力反算。实际上船舶抛锚时, 通常设置有足够长度的锚链, 以便有一段躺底锚链, 使锚不产生上拔力, 即α= 0°; 而如果又选定了锚链, 则每米链重w也为常量(本船采用56 AM3 锚链,单位长度重68 kg/m);本船作业环境<40 m,水深y取40 m。根据码头作业条件,假设抛锚点与导缆器的距离x为400 m。x值代入公式(7),求得作用在导缆器滚轮的力为1 360 kN,同时x每增加1 m,拉力变化约为10 kN。
1.5 船舶运动方程
对于系泊状态下的受风浪流和波浪联合作用下的浮体,有如式(8)所示运动方程:

式中:[M]为浮体的广义质量矩阵,kg;[μ]为浮体的附加质量阵,kg;[λ]为阻尼系数阵(无量纲);[C]为静水恢复力矩阵,N/m;别为广义加速度列阵以及广义速度列阵,为广义位移列阵,m。F f k为佛汝德-克雷洛夫力(Froude-Krylov)、F d为波浪绕射力、F w为风力、F c为流力、F m为系泊力、F sd为波浪二阶漂移力,单位均为N。
2 计算结果分析
不同波浪方向的船舶运动时历响应图,如图6-图11 所示。
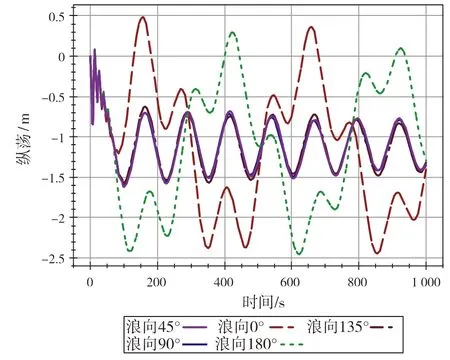
图6 纵荡时域响应图
图7 横摇时域响应图

图8 横荡时域响应图
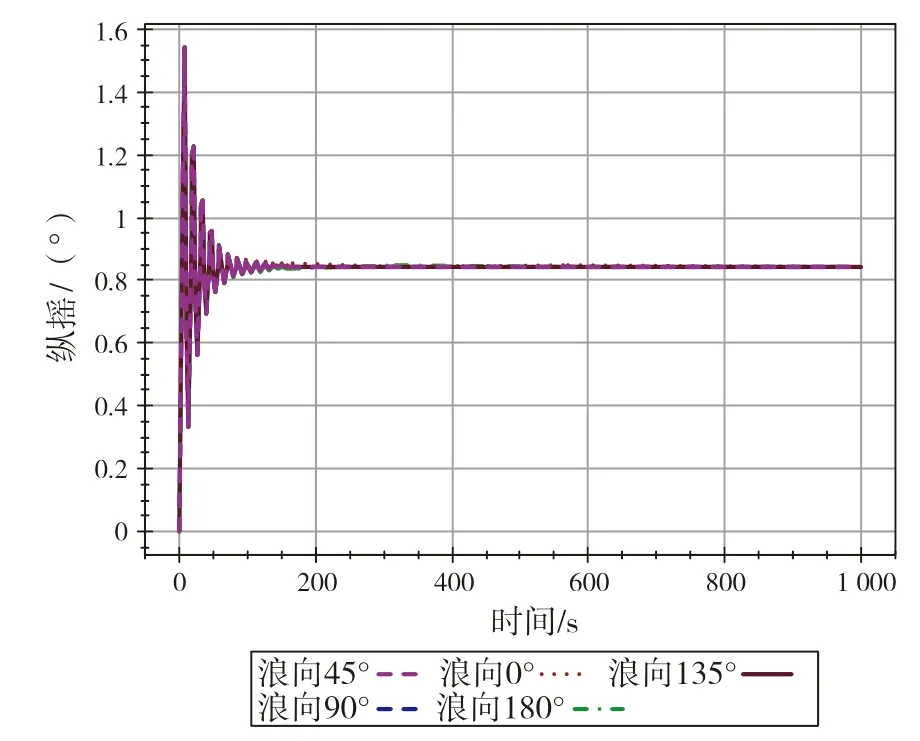
图9 纵摇时域响应图
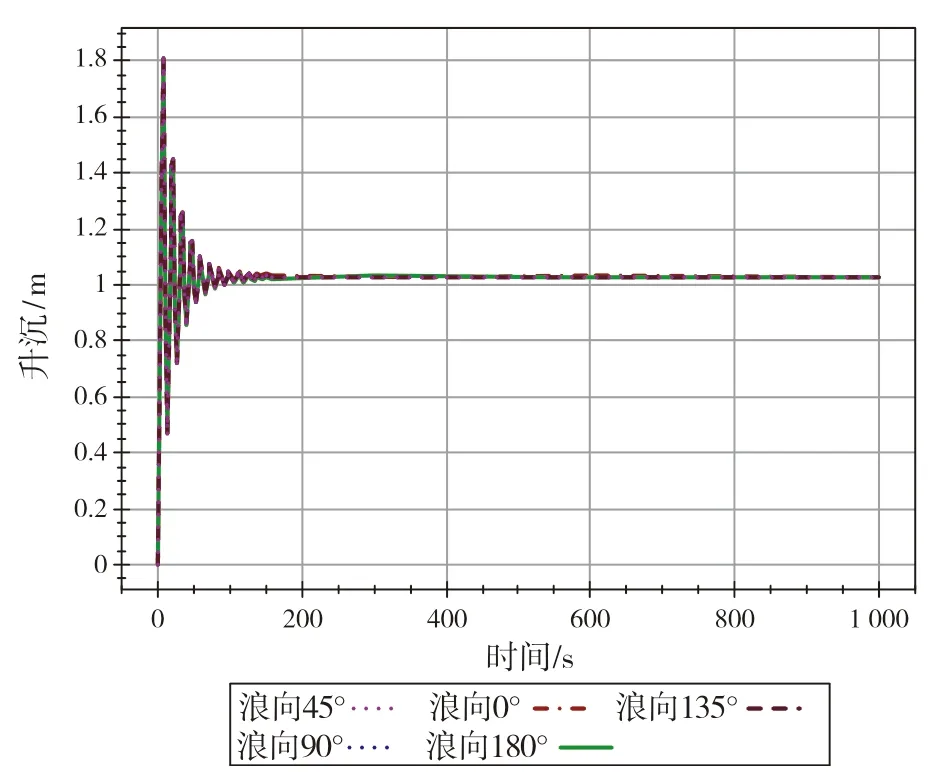
图10 升沉时域响应图
由时历曲线可见,6 个自由度运动中,纵荡和横荡在某些浪向下呈周期性振动,其余横摇、纵摇、升沉和首摇都在约初始的100 s 以内达到相对平衡。因此对于浮吊来说,在作业工况下,水平面上的纵横荡为其主要的运动方式,并呈现周期性大幅度的震荡现象。其中,纵荡在迎浪(0°)和随浪(180°)的两个浪向工况下出现较大幅度的纵荡位移,且呈现一定周期的重复性,在-2.4~0.5 m范围反复震荡,周期约500 s。纵荡在横浪及斜浪(45°/135°)呈现正弦波式规则振动,振幅约2 m。横荡在横浪(90°)情况出现大幅横荡位移,且呈现周期性,在-0.8~3.2 m 反复震荡,周期约500 s。

图11 首摇时域响应图
3 结 论
操作中应该注意合理利用浪向施工,尽量使船舶处以斜浪工况。在对应浪向下,船舶运动最终处于相对平衡状态,且振荡幅度小,对纵横荡都有较好的抑制,利于吊装作业;同时应注意规避危险浪向(如迎浪、随浪和横浪),在这些工况下,纵荡和横荡处于周期性位移振荡过程。
作业过程中如果无法完全避开危险工况,则应实时监控船舶水平位移,避开位移变化较快的时间段,利用位移波峰或波谷的时间段(如本例中的200 s 和400 s 左右,见图12)。图13 显示在位移波峰波谷时间正是位移变化的的极小值情况,应该在此时间段完成最后的定位和吊装。

图12 90°横浪,横荡位移响应

图13 90°横浪,横荡速度响应
考虑到水平面的位移振荡为主要运动方式,为使船舶定位更准确,可采取增加系泊力的方式,进一步限制船舶位移。比如本船在现有系泊力基础上增加50%,同时系泊力阻尼系数也随之增大,则最后纵荡位移(图14)和横荡位移(下页图15)的振幅均明显减小,更利于吊装作业。

图14 纵荡位移响应

图15 横荡位移响应
本文的结论也同样适用于类似的靠锚泊定位的工程船舶,比如铺管船、全回转起重船等,比如在风浪流作用下,横荡和纵荡是最为明显的运动,应该在安全性和功能性设计上充分地考虑水平位移可能带来的风险。另外,最为有效的限制水平位移的方法,是增加系泊缆强度,施加更大的系泊力。
猜你喜欢
江苏船舶(2022年4期)2022-10-10
电声技术(2022年7期)2022-09-23
上海理工大学学报(2022年3期)2022-07-13
船海工程(2021年6期)2021-12-17
花火彩版B(2020年5期)2020-09-10
科技视界(2020年24期)2020-08-26
科技视界(2020年22期)2020-08-14
船海工程(2020年3期)2020-07-31
船舶标准化工程师(2020年1期)2020-06-12
江苏船舶(2019年2期)2019-06-26
