
时变论域下红绿灯配时的模糊控制
2019-12-03 09:49:34
测控技术 2019年11期
(1.长沙理工大学 电气与信息工程学院,湖南 长沙 410114; 2.中国科学院自动化研究所 复杂系统管理与控制国家重点实验室,北京 100190)
随着我国经济的高速发展,机动车数量的急剧增加,交通需求迅速扩大,另一方面,信号灯配时设置不合理、交通设置老化等原因,致使我国大多数城市面临着交通拥堵问题。根据交叉口的交通流状况对交通信号灯进行合理配时,将有助于增强道路的通行能力,改善城市交通拥挤的现状。
定时信号配时方法,国外有英国的Webster配时法。澳大利亚基于Webster 配时法,研究了超饱和交通情况,将Webster延误模型进行了改进与扩充,提出了ARRB配时法。国内,主要有冲突点法[1]、停车线法[2]。
交通信号的实时控制和优化,引起了国内外学者的广泛关注。龙建成[3]等人运用元胞传输模型研究交叉口的交通流,提出了固定信号配时方法和动态信号配时方法,以平衡交叉口各相位的通行能力。但是其提出的预测型信号配时方法和理想型的配时方法还有一些差距。Li[4]等人提出了一种利用平行控制分析交通行为的方法。
交通系统是一个多变的、复杂的系统。交通参数具有随机性,即使在短时间段内,其产生较大变动的概率也较高。因此依据定时信号配时方法,将不能给出匹配动态交通流的配时方案。针对配时周期随时间变化而改变的情况,莫红等人采用时变论域及平行系统理论分析交通流状态,并根据车辆排队长度,给出了与之相适应的红绿灯配时方案[5-7]。
本文综合时变论域与模糊集合,研究基于时变论域的模糊控制方法,动态地调整信号周期和通行时长,实现对红绿灯的实时配时。
1 时变论域
时变论域是以论域作为研究对象建立起来的集合,而且集合中的元素会随时间的变化而改变。记时变论域为Ωt,若对任意t,都有Ωt=Ω,则称之为恒定论域。
论域及其对时间变化的特点确定了时变论域上的模糊集合。根据论域的特点将时变论域分为离散型与连通型,根据时变论域变化的趋势,进一步将每一类分成递增、递减及波动3种。模糊集合的隶属度函数是确定不变的,但时变论域上的模糊集合,当论域随时间改变时,其隶属度函数也会随时间发生改变。本文主要将连通时变论域运用于交通信号灯的实时配时。
2 时变论域下信号周期
设{Ω1,Ω2,…,Ωk,…}为时变论域序列,若每一个Ωn连通,即Ωn可以表示为
Ωn=[an,bn],n=1,2,…
{Ωn,n∈N}为连通时变论域。
周期是指信号灯运行一个循环所需的时间。周期的长短将影响交叉口的通行能力和车辆的延误时间。匹配交叉口交通流状态的周期可以提高交叉口的通行能力,大幅度减少车辆延误。《交通管理与控制》根据我国交通特点给出了合适的周期范围40~180 s,设周期的取值为
Tk=40+20k
式中,k=0,1,…,7,则对应的论域
Ωk=[0,40+20k]
为连通时变论域序列。
一个四相位控制的十字路口如图1所示。

图1 四相位控制示意图
城市交通信号控制系统对交通信息源的采集主要是利用在路口车道安装的检测器,来获取交通流量、车速、占有率等信息数据。系统采集、处理、提取控制区域内的车流量、平均车速、停车率、排队长度等交通信息[8]。
利用红灯时排队长度来评价交叉口拥堵程度。根据北京市城市规划设计院建议的交叉口4级服务水平,设红灯时排队长度不足50 m定义为通畅VS,50~100 m定义为较通畅NS,100(不含100)~150 m定义为较拥堵NJ,超过150 m定义为拥堵VJ。
本文采集了交叉口当前绿灯方向相位上的最大排队长度l、红灯方向各相位上的排队长度rlj(j=1,2,3)、平均停车次数n等交通参数。将采集获得的l和rlj(j=1,2,3)数据的数字形式,根据建议的4级服务水平,转换为词VS、NS、NJ、VJ的形式。4个相位的基词组合有35种情况,如表1所示,根据表1,得出在当前交通流状况下,周期的论域。
表1 周期的论域
3 时变论域下模糊控制器设计
3.1 输入量、输出量的模糊化
依据实际交通控制的经验,设输入量l的取值范围为0~200,则l的基本论域为[0,200],在论域[0,200]上定义7个模糊子集,相应语言值如下:
{l1(很短),l2(短),l3(较短),l4(中等),l5(较长),
l6(长),l7(很长)}
根据实际交通控制的经验,设输入量n的变化范围为0~4,则n的基本论域为[0,4],在论域[0,4]上定义5个模糊子集,相应的语言值为:
{n1(少),n2(较少),n3(中等),n4(较多),n5(多)}。
当周期对应论域为Ω0=[0,40],Ω1=[0,60],Ω2=[0,80]时,输入量l、n各语言值对应的隶属度函数如图2、图3所示。

图2 l的隶属度函数

图3 n的隶属度函数
当周期对应论域为Ω3=[0,100]和Ω4=[0,120]时,输入量l、n各语言值对应的隶属度函数如图4、图5所示。

图4 l的隶属度函数
图5 n的隶属度函数
类似地,当周期对应论域为Ω5=[0,140]时,输入量l、n的隶属度函数与图2、图3类似。当周期对应论域为Ω6=[0,160]和Ω7=[0,180]时,输入量l、n的隶属度函数与图4、图5类似。
设t为当前绿灯方向相位分配的绿灯时间,则输出量t的基本论域是:
[0,40+20k],k=0,1,…,7
在该论域上定义5个模糊子集,相应的语言值为:
{t1(短),t2(较短),t3(中等),t4(较长),t5(长)}。
本文研究如图1所示的四相位控制,当周期对应论域为Ω1=[0,60]时,设输出量t各语言值对应的隶属度函数如图6所示。
图6 t的隶属度函数
当周期对应论域为Ω2=[0,80]时,设输出量t各语言值对应的隶属度函数如图7所示。

图7 t的隶属度函数
类似地,当周期对应论域为Ω0及Ωk=[0,40+20k],k=3,4,…,7时,输出量t各语言值对应的隶属度函数与图6类似。
3.2 模糊控制
依据输入量的各种变化情况,给定时变论域下的动态模糊控制规则。
在周期对应论域为Ω0时,设动态模糊控制规则R0表示如下:

















同理,在Ωk,k=1,2,…,7上的动态模糊规则为R1,R2,R3,R4,R5,R6,R7。
3.3 限定条件
前文所提出的配时方案,是依据车流量来确定各相位通行时长,忽略了驾驶员的反应时间及等待极限,所以可能导致红灯时间过长或较短。据统计,我国红灯设置时间从30~130 s不等,研究发现驾驶员在等待时长约80 s时,平均反应速度最快[9]。
现统筹交叉口交通流量与行驶安全两方面,为了改善交通堵塞和减少闯红灯现象,给出如下约束条件以完成实时配时方案的优化:
① 若l=0,且未检测到有车辆驶入,则跳过该相位;
②t≤Nmax,设Nmax为通行时间的最大值,该值是依据交叉口各相位的实际车流量设置的,但其最大值为80 s;
③ 当红灯时长超过130 s,则发出警告信号,系统将立即预测短时交通流的变化趋势,由预测的变化趋势,进一步改变当前绿灯相位上的绿灯时间。
4 实例分析
城市交通的建模可以使用仿真建模工具VISSIM。VISSIM能分析各种交通条件下城市交通的运行状态,是评价交通工程设计的有效工具,且VISSIM是国内外应用最广泛的微观交通仿真系统。本文以长沙市某交叉口为例,通过VISSIM建模、仿真,来验证本文配时方案的有效性。
4.1 路口数据
综合仿真所需的交通数据及本文配时方案所涉及的参数,对该路口进行了数据采集、统计、整理。选取一天内最具有代表性的5个时段,统计、计算出各时段内车流量的平均值,结果见表2。记录路口实际信号配时方案,如表3所示。

表2 十字路口交通基本数据

表3 十字路口原信号配时方案 单位:s
4.2 VISSIM仿真
步骤1:在仿真系统中,以实际路口图为底图,添加各方向上的直行、左转、右转车道,同时在各车道上添加对应的车流量。该路口南北方向上的右转车道也是直行车道,需设置路径决策。由表3的数据,给出交通信号及让行规则。在十字路口处定义节点,由节点评价得到延误、排队长度、Stops等参数数据。仿真、整理数据,得到原信号配时方案下各时段车辆延误结果。
步骤2:步骤1仿真所得到数据都是平均值。
① 整理仿真所获得的数据,将各相位上的最大排队长度的最大值的数据形式转换成词的形式,根据表1,得出周期对应的论域,如表4所示;
② 整理仿真数据,将各相位方向上平均排队长度的最大值作为各相位的l,如表5所示;
③ 整理仿真数据,将各相位的Stops的最大值作为各相位的n,如表6所示;
④ 在表4所示周期论域下,将表5、表6所得值作为输入,在Matlab中仿真。

表4 相位转化词与周期论域

表5 平均排队长度 单位:m

表6 各相位的平均停车次数(Stops)值
步骤3:在Matlab中建立模糊控制器,编辑模糊控制的输入和输出变量的隶属度函数,设置动态模糊规则。仿真中采用重心法解模糊。输入步骤2中获得的输入值,利用Matlab仿真,进行清晰化计算。整理数据,遵循四舍五入原则,得出各相位的绿灯时长,且设黄灯时长为3 s。
统计得出各时段对应的配时方案如表7所示。
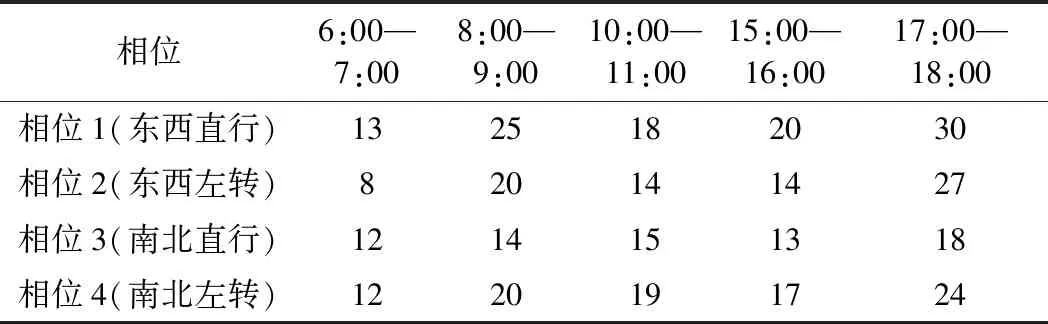
表7 十字路口绿灯时长配时方案 单位:s
步骤4:运用表7中的配时方案,在VISSIM中仿真,验证本文方法的有效性。得出配时方案优化后的车辆延误时间。
4.3 结果对比
将得到的配时方案优化后的车辆延误时间、最大排队长度、平均排队长度等仿真数据进行整理,与配时方案优化前的数据进行比较,如表8、表9、表10所示。

表8 方案优化前后的车辆延误时间 单位:s

表9 方案优化前后的平均排队长度 单位:m

表10 方案优化前后通过交叉口的车辆数
不难看出,配时方案优化前,该路口南北方向上的车辆通行顺畅,但东西方向上车道数少且车流量大,容易拥堵。配时方案优化后,提高了东西方向的出行效率,大幅度减少了该方向上的车辆延误。同时在相同的仿真时间段内,通过该交叉口的车辆数增加,且各时段平均延误都下降了,说明优化后的配时方案,整体提高了该交叉口的通行能力,有效缓解了拥堵。
5 结束语
本文基于时变论域,建立动态模糊规则,优化十字路口的配时方案。通过VISSIM仿真实例,验证了该方法的有效性。本文仿真仅针对车辆的通行,下一步工作可以结合神经网络模型[10]将行人、交叉口周围环境、突发事件等能影响交叉口通行能力的因素加入仿真。
猜你喜欢
科技创新与应用(2024年8期)2024-03-25 03:24:54
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
商品与质量(2020年38期)2020-11-06 06:50:08
中国保健营养(2019年1期)2019-10-21 09:54:49
测控技术(2018年10期)2018-11-25 09:35:52
智富时代(2017年4期)2017-04-27 17:08:47
广东石油化工学院学报(2016年6期)2016-05-17 05:17:43
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电源技术(2016年2期)2016-02-27 09:04:56
中国铁道科学(2015年4期)2015-06-21 06:46:08
