
基于闭环电压反馈的混合励磁电机弱磁控制
2019-11-15 08:09:34李珊瑚牛大强
微电机 2019年9期
王 青,刘 旭,李珊瑚,邢 栋,牛大强
(1.省部共建电工装备可靠性与智能化国家重点实验室(河北工业大学电气工程学院),天津 300130;2.河北省电磁场与电器可靠性重点实验室(河北工业大学电气工程学院),天津 300130)
0 引 言
近年来,随着化石能源的短缺和环境污染的日益严重,电动汽车和混合动力汽车受到越来越多的关注。作为此类汽车最主要的动力部分,其电机应该具有较大的起动转矩和较宽的调速范围。目前,感应电机、永磁同步电机和开关磁阻电机等已经在电动汽车中使用,其中永磁电机因其结构简单、转矩密度高、效率高的优点应用最广。在永磁电机中,气隙磁场由永磁体产生,不易被调节。为了电机能达到更高的转速,只能利用直轴电流实现弱磁扩速,但是较大的直轴电流会增加电机不可逆退磁的风险[1]。为了提高电机气隙磁场的调节能力,一种可以同时通过电枢电流和直流励磁电流来调节气隙磁场的混合励磁电机开始被提出[2-3]。混合励磁电机集合了电励磁电机励磁调节方便和永磁电机效率高、转矩密度大等优点,在电动汽车等领域具有宽阔的应用前景。
在混合励磁电机中,传统的控制策略将电机运行状态分为低速区和高速区,通过电机的转速或者相电压幅值判断电机进入高速区的临界点并给出相应的参考电流给定方法[4-5]。在文献[6-11]中提出的混合励磁电机控制策略都是基于电机转速判断高速区临界的,不能充分利用逆变器的输出电压。这些控制策略中,均通过转速环确定其中一个电流参考值,其他两个电流参考值则通过电机的数学模型计算得到,计算量大且依赖于数学模型,难以实现控制稳定。文献[12]中给出了更加精确的基于电压差判断高速临界点的方法,并通过实验验证了方法的可行性,但没有给出高速区控制的具体实现方法。在文献[13-14]中,给出了基于反馈电压判断电机弱磁临界点的方法,但是在高速区中直流励磁绕组电流始终保持为零。
为了更加精确地判定电机运行区域,并且实现高速的稳定运行以及简化控制算法,本文针对一台12槽10极混合励磁开关磁链电机(Hybrid Excited Switching Flux Permanent Magnet,HESFPM,Machine),提出了一种易于实现的闭环电压反馈弱磁控制方法。本文首先根据电机的数学模型,将电机相电压反馈值与逆变器最大线性输出电压的差值作为电机低高速运行状态的判定值,给出了详细的弱磁控制策略,最后通过仿真和实验验证所提出控制策略的有效性。
1 电机拓扑结构和数学模型
1.1 12槽10极HESFPM电机结构
图1为12槽10极HESFPM电机的拓扑结构图,永磁体、直流励磁绕组和电枢绕组都放置在定子上,转子上没有任何绕组。与传统的永磁电机相比,HESFPM电机的气隙磁密可以通过d轴电流和直流励磁电流来调节。
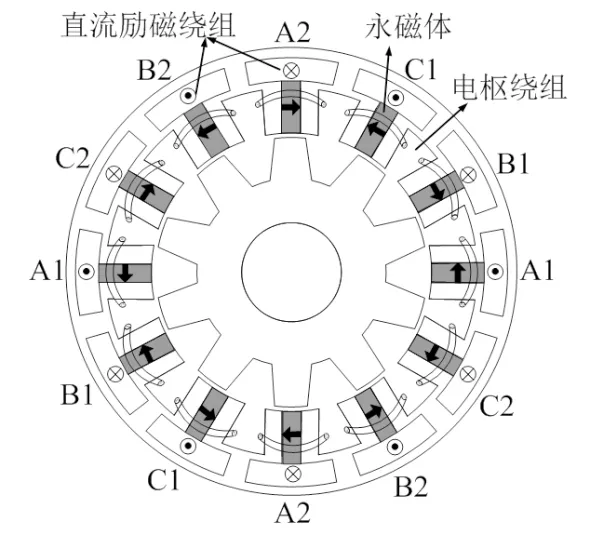
图1 HESFPM电机的拓扑结构图
1.2 HESFPM电机数学方程
图2给出了d轴磁链关于直流励磁电流和d轴电流的三维关系图,可以看出d轴磁链可以通过d轴电流或者直流励磁电流来调节,规定直流励磁绕组产生与永磁磁链相同方向磁链时的电流方向为正。因此,忽略磁链饱和,电机磁链和电压方程可表示为
(1)
(2)
电机的电磁转矩:
Te=1.5piq[id(Ld-Lq)+ψpm+Msfif]
(3)
式中,ud,id,Ld,ψd,uq,iq,Lq,ψq分别为d轴和q轴上的电压、电流、电感和磁链;ψf,ψpm分别为直流励磁绕组和永磁体产生的磁链;if,uf分别为直流励磁电流和直流励磁电压;Rs,Rf分别为电枢绕组电阻和直流励磁绕组电阻;Lf,Msf分别为直流励磁绕组的自感和与电枢绕组之间的互感;ωe,p,Te分别为电机的转子角速度、电机极对数和电磁转矩。

图2 d轴磁链与直流励磁电流和d轴电流的关系
由于逆变器的限制,HESFPM电机的电压和电流应满足:
(4)
式中,ismax,usmax分别为逆变器最大输出电流和最大线性输出电压。
当电机运行稳定时,忽略电阻影响,根据式(1)和式(2),d轴和q轴电压为
(5)
从式(4)和式(5)可以得到HESFPM电机的电流约束条件:
(6)
因此,电流极限是以(0,0)为圆心、ismax为半径的圆,电压极限是以(ψtotal/Ld,0)为中心、长轴a=usmax/ωeLd和短轴b=usmax/ωeLq的椭圆。由于直流励磁电流的存在,电压极限的中心是可以移动的,如图3所示,随着直流励磁电流的反向增大,电压椭圆的中心会向原点O移动。

图3 HESFPM电机运动轨迹
2 基于电压反馈的弱磁控制策略
由HESFPM电机电压方程可知,随转速不断增大,电机电压不断增大。当电机电压大于usmax时,就需要对电机气隙磁场进行弱磁实现电机的高转速运行。因此,通过电机反馈电压与usmax的差值来判断电机是否进入弱磁区域。
本文提出的基于电机反馈电压的弱磁控制策略的控制框图如图4所示。直流励磁绕组通过H桥控制,电枢电流通过三相全桥控制,如图5所示。当三相逆变器采用SVPWM调制时,usmax满足式(7),其中Udc为直流母线电压。
(7)
闭环电压反馈控制器将反馈电压和最大相电压之间的误差与PI控制器相结合。闭环电压反馈控制器可实现:(1)判定HESFPM电机的低速运行区域。(2)通过比较闭环电压反馈控制器输出(Δe)和直流励磁电流额定值,将高速运行区分为直流励磁电流弱磁(高速I区)和直流励磁电流与d轴电流共同弱磁(高速II区)两个区域。(3)在两个区域根据不同弱磁控制方法调节直流励磁电流和d轴电流。
如图6所示,在电机低速运行时,电机中的反馈电压低于最大相电压。因此,Δe大于零。在该区域运行时,采用零d轴电流控制方法,且保持直流励磁电流为零。随着电机速度的增加,d轴和q轴电压也会随之增大。如果电机中的反馈电压高于电机最大相电压(Δe<0),此时逆变器输出电压不能满足电机运行,电机进入高速运行区域。

图4 HESFPM电机控制框图

图5 电枢电流与励磁电流控制电路

图6 HESFPM电机的低速运行区域判定方法
图7为电机高速I区和II区的判定方法,即根据闭环电压反馈控制器的输出与直流励磁额定电流ifN的差值判定。

图7 电机高速运行I区和II区的判定方法
图8为高速I区和II区的弱磁电流控制方法。当电机运行在高速I区时,本文采用直流励磁电流弱磁控制方法,即d轴参考电流(id2)为0,直流励磁参考电流(if2)幅值等于Δe,q轴参考电流(iq2)由转速环输出给定,如图8(a)所示。当电机运行在高速II区时,本文采用直流励磁电流和d轴电流共同弱磁控制,即直流励磁电流(if3)的幅值等于额定值ifN并保持不变。此时HESFPM电机可看作永磁同步电机,通过调节d轴电流降低电机电压以继续提高转速,如图8(b)所示,此时q轴电流通过转速环和d轴电流限幅决定。电流参考值分配原则,如表1所示。
通过以上分析可以看出,在高速运行区提出的控制策略中关于三个参考电流的给定,两个是通过转速环和反馈电压环PI给定,从而保证在高速区的稳定运行。
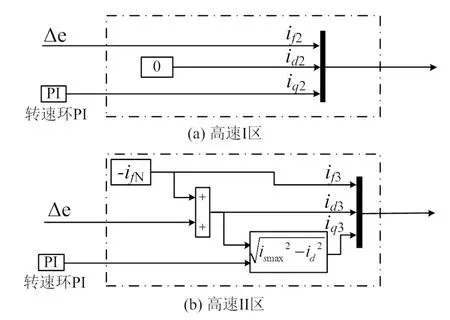
图8 高速I区和II区的控制方法

表1 电流参考值分配原则
3 仿真结果与分析
为了验证所提出的电压闭环控制策略,在Matlab中构建了HESFPM电机和控制系统模型。HESFPM电机的主要参数在表2中列出。其中Uf是直流励磁电压,ifN是额定直流励磁电流。

表2 HESFPM电机的主要参数(20℃)
图9为HESFPM电机在高速区的仿真结果。在仿真中负载保持0.3 Nm。在0.5 s时,速度从1000 r/min增加到1500 r/min。反向的直流励磁电流首先用于削弱d轴磁链,此时d轴电流保持为零。当电机转速改变时,q轴电流有部分超调,但是可以被快速调节平稳。电机在1 s时升为1600 r/min,然后在1.5 s时增大为1700 r/min。此时直流励磁电流已达到极值,保持额定幅值不变,为了达到更高转速,负的d轴电流继续用来减弱d轴磁链。转速在变化时有一些超调,但可以快速调整并保持稳定。
图10为HESFPM电机在有直流励磁绕组和无直流励磁绕组情况下的转矩转速曲线。
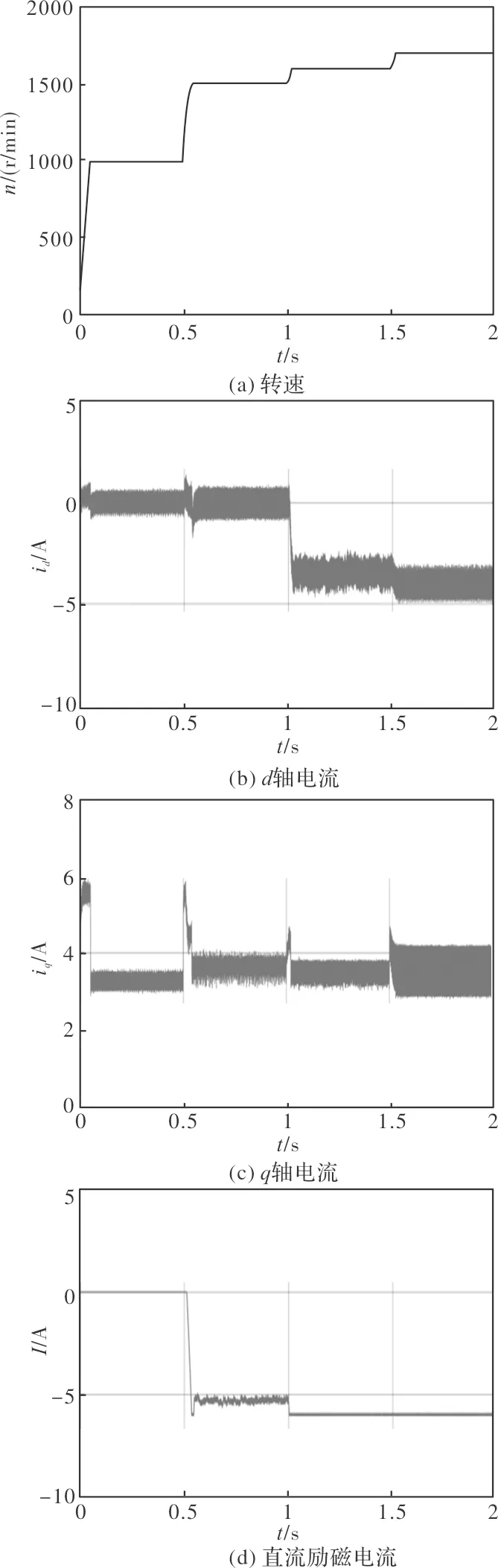
图9 HESFPM电机弱磁仿真结果
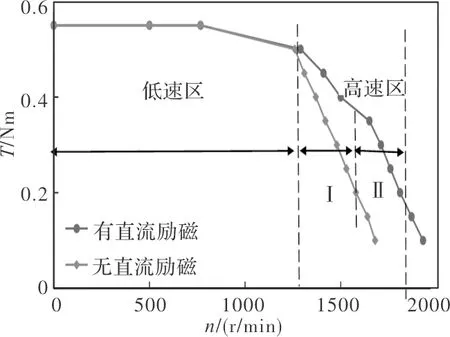
图10 HESFPM电机转矩转速曲线
4 实验验证
图11为HESFPM电机驱动系统实验平台。在实验中直流母线电压和直流励磁绕组电压为20 V,电枢电流和直流励磁电流最大幅值限制分别为6 A和4 A。
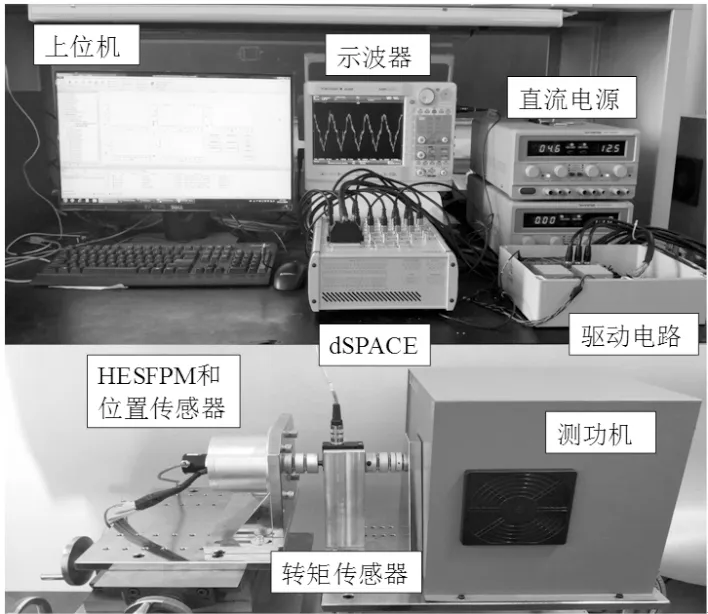
图11 HESFPM电机实验平台
图12为电机进入高速I区的实验结果。当电机空载从1400 r/min升速到1550 r/min时,电机进入弱磁阶段,直流励磁电流反向增大,d轴电流保持为零。可以看到,控制系统实现电流的快速调整,转速保持稳定。
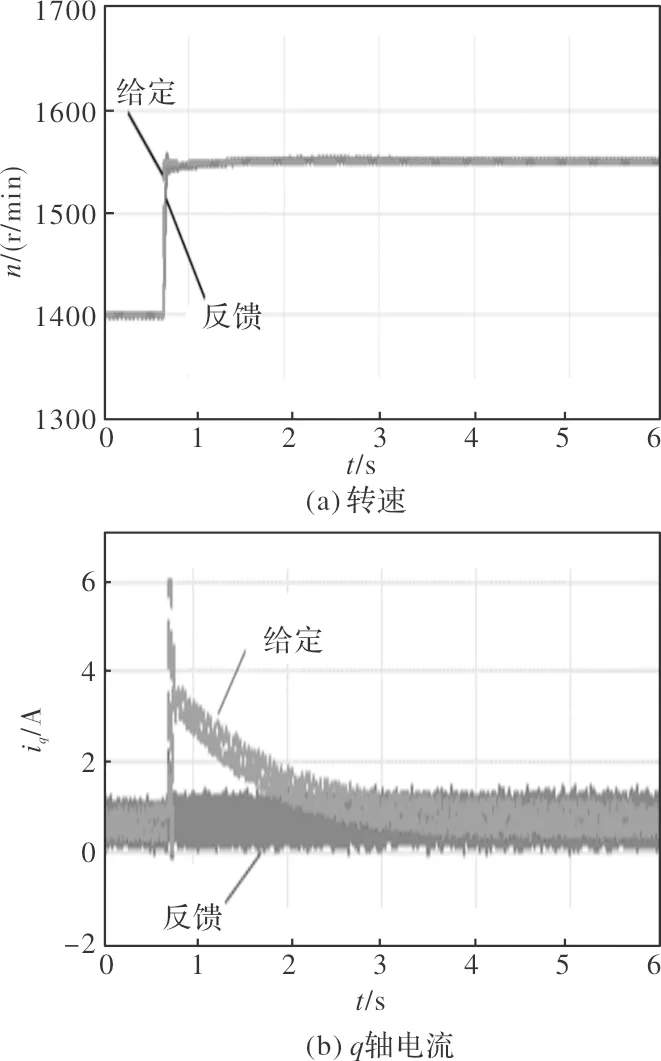

图12 HESFPM电机高速I区实验结果
如图13所示,当电机转速继续增加,在0.97 s时从1550 r/min升到1750 r/min,直流励磁电流开始继续反向增大,此时d轴电流保持为零。在1.2 s附近时,直流励磁电流增大到额定值并保持不变,d轴电流开始降低,使电机转速继续增加。q轴电流在转速变化时有一定超调,但是可以很快调整平稳,从而实现在高速II区的稳定控制。

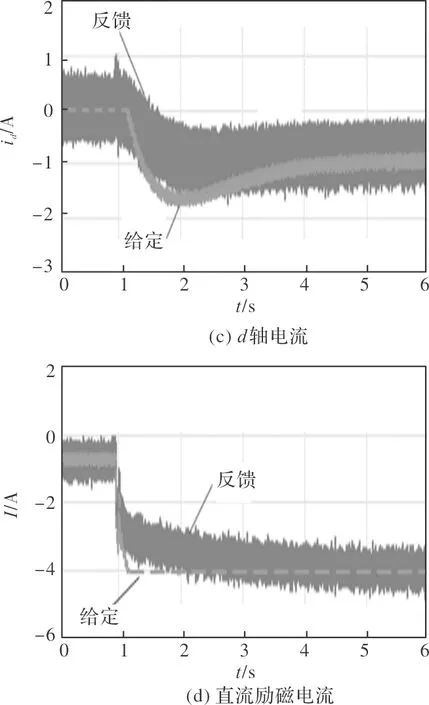
图13 HESFPM电机高速II区实验结果
5 结 语
为了实现混合励磁电机的高速运行,本文提出了一种易于实现且能稳定运行的闭环电压反馈弱磁控制策略。通过电机反馈电压与最大相电压的差值将电机运行区域分为低速、高速I区和II区。给出在不同运行区域的d轴电流、q轴电流和直流励磁电流的分配方法,实现了混合励磁电机在高速区的平稳运行。通过仿真和实验验证了所提出控制策略的有效性,该控制策略同样适用于其他类型混合励磁电机。
猜你喜欢
火力与指挥控制(2022年5期)2022-07-25 03:50:10
河北电力技术(2021年2期)2021-07-29 09:16:30
弹箭与制导学报(2020年1期)2020-07-09 10:52:00
弹箭与制导学报(2019年6期)2019-06-24 08:40:20
电子制作(2018年1期)2018-04-04 01:48:34
大电机技术(2017年3期)2017-06-05 09:36:02
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
水电站机电技术(2014年4期)2014-10-13 08:30:07
电测与仪表(2014年23期)2014-04-04 12:08:30
