
一种基于FPGA的步进电机伺服阀控制器设计
2019-11-15 08:09:40蒋文坚
微电机 2019年9期
蒋文坚
(陕西国防工业职业技术学院,西安 710300)
0 引 言
为了实现环境控制和热能管理,现代小型民用飞机中环境控制系统和燃油热管理系统中包括大量由电机拖动的阀门[1]。传统电动阀门采用普通有刷直流电机作为驱动,该类电机由于自身寿命短、控制精度低等缺点,限制了阀门的高精度闭环应用[2]。新一代电动阀门采用无刷电机作为驱动,虽解决了寿命短的问题,但无刷电机在低速时控制精度不高,无法实现精确角度调节[3]。根据民用飞机适航准则对成品可靠性、启闭角度可控性及环境要求的不断提高,目前生产的电动阀门很难满足新研飞机的要求,为此新一代民用飞机采用步进电机作为阀门的驱动源,提高产品的可靠性要求[4]。
步进电机的本质为一种将电脉冲信号转化为相应角位移的执行机构,具备控制精度高,控制方式灵活方便等特点[5]。在非超载的情况下,通过控制个数和脉冲频率实现伺服阀门位置和转速的精确调节[6]。步进电机主要有反应式、永磁和混合式三种结构,混合式步进电机综合了其他两类电机的优点,具备步距角小、高分辨率、高响应频率、高运行效率的优点[7-8],相同体积情况下,输出的转矩最大,因此目前普遍选用两相混合式步进电机作为电驱伺服阀动力装置。
针对两相混合式步进电机伺服控制系统,设计了一种基于FPGA的步进电机伺服阀控制器,驱动飞机环境控制系统和燃油热能量管理系统的气、液活门转动,达到控制各网络节点流量、压力、温度的功效,实现飞机环境温度、压力和热能量的调整。同时,考虑到飞机系统的可靠性需求,本文还设计了相应的电机过流保护机制。
1 系统总体设计
步进电机伺服系统在民用飞机环境控制和燃油热管理系统的交联图如图1所示。该系统主要由飞管总线、环境控制或燃油热管理系统和步进电机控制系统组成。
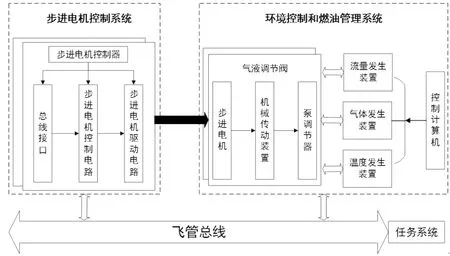
图1 步进电机伺服系统控制交联图
从上图可以看出,飞机环境控制系统、燃油热管理系统通过读取相关传感器数据,实时解算出需要调节的气液阀门角度、转速等状态信息,并将控制命令上传至飞机管理总线。随后,总线控制器将上位机接收到的电机转动控制命令发送给步进电机控制系统,通过SPI串行通讯方式,将控制命令下发至FPGA单元。最后,根据接收到的控制指令等相关信息,FPGA产生固定的脉冲序列,用以驱动电机转动到预定位置,实现阀门开角的控制,最终完成飞机系统环境温度调节和热能量管理功能。
2 系统硬件电路设计
本文设计的两相混合式步进电机控制系统硬件电路,主要由总线控制器CPU、电机控制器FPGA、双H桥功率主回路、反时限保护电路、电流监控电路和输出监控电路组成,系统组成如图2所示。

图2 系统硬件电路系统框图
总线控制器CPU与FPGA主要作用是实时采集电流跳闸信号、输出状态信号和电机电流信号,完成电机控制策略的实施。
其中,双H桥功率主回路分别由功率离散量接口电路和功率离散量输出电路组成;本设计中控制器产生的控制脉冲序列信号经过上、下桥驱动电路进行相应的放大来直接驱动作用在电机两相绕组上的MOSFET场效应管开关,从而驱动电机转动。另外,在反时限保护电路中,系统根据电流特性设置相应跳闸信号,用来保护后级输出电路。最后,输出监控电路主要用于机上自动测试功能。
3 FPGA逻辑设计
3.1 逻辑总体设计
步进电机控制逻辑单元的控制框图如图3所示,主要实现步进电机的控制功能。

图3 步进电机逻辑控制框图
从图3可以看出,通过SPI接口,总线控制器将接收到的电机转动状态信息以数据包的格式发送至FPGA逻辑控制单元,FPGA逻辑控制单元对接收到的控制命令进行数据包解析,从而控制步进电机以给定的转速、转向、转动步数转动。
在本设计中,FPGA逻辑主要由SPI接口、总线数据包解析、步进电机控制逻辑三部分组成,电机控制逻辑依据配置命令,实现8路步进电机驱动信号输出。
3.2 SPI接口设计
SPI接口主要采用三线制进行数据传输,工作于全双工从模式状态,数据帧长度为16位,组成包头识别码+数据位的形式;采样时刻设置成系统时钟信号的下降沿,移位时刻设置成时钟信号的上升沿,空闲状态下该钟信号默认输出高电平,工作状态中该时钟信号默认输出低电平。另外,SPI接口设计采用同步时序电路。
3.3 数据包解析设计
数据包解析逻辑主要是依据SPI接口收到的数据,完成相应数据的解析工作,继而发送给步进电机控制单元实现必要的逻辑控制。数据包解析寄存器分配表如表1所示。
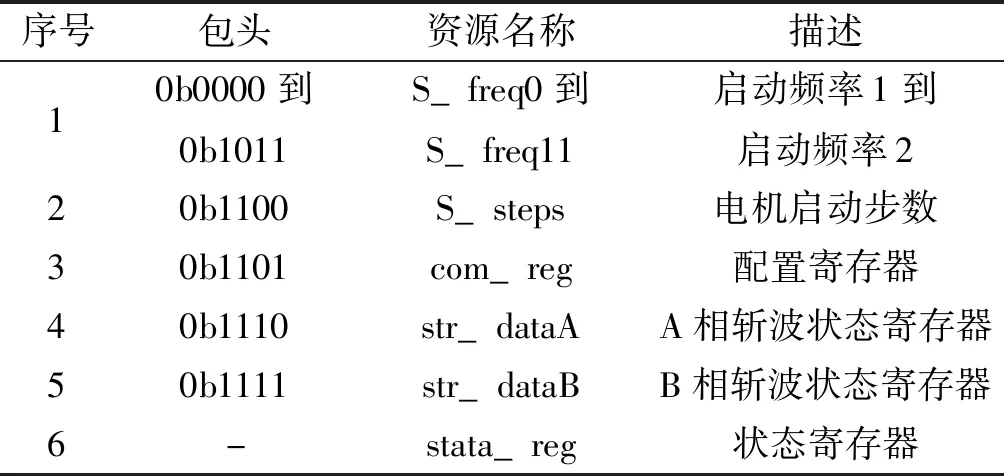
表1 数据解析寄存器分配表
本数据包长度为17位,其中1到16包数据为电机控制命令,第17包数据为电机转动状态反馈信息,每包数据由4位包头和12位数据位组成。
3.4 步进电机控制设计
步进电机控制单元主要是根据数据包解析的结果来驱动步进电机转动,图4所示为步进电机状态迁移图,用于实现对步进电机转动驱动信号的控制功能。

图4 步进电机状态转换框图
本设计中系统共配置八个状态,其中step1~step4作为两相四拍步进电机的驱动逻辑状态;同时,在idle0~idle3这4种空闲状态下,电机进入转动状态的驱动逻辑状态。其中在步进电机驱动逻辑中,PWM斩波信号斩波频率设置成10 kHz,设置死区时间为50 μs,根据电流反馈结果进行实时调整斩波占空比。步进电机控制单元依据启动频率寄存器和启动步数寄存器实现步进电机的软启动加速曲线,通过调节斩波控制寄存器,最终实现对电机的恒流控制。
4 设计验证
本文设计借助于步进电机力矩实验设备测试步进电机控制系统在不同负载下的工作特性,电机参数如下:A、B相电阻4.6 Ω,步距角1.8°,最大失步转速1250 Hz,电机驱动方式为两相双四拍。电机起动频率从400 Hz以抛物线加速方式迅速上升至750 Hz,实验通过RVDT信号采集检测电机失步情况。图5所示为电机A相电流和驱动信号控制波形。

图5 A相电流及驱动信号
实验结果证明,本文设计的控制系统能够满足飞机环境控制系统和燃油热管理系统对电驱伺服阀的性能要求。
5 结 语
针对现代民用飞机环境控制系统和燃油热管理系统中电机拖动的阀门的可靠性和耐环境要求,本文设计了一种基于FPGA的步进电机伺服阀控制器,选用两相混合式步进电机作为阀门的驱动源,利用FPGA强大数据的吞吐量、灵活的系统配置能力,完成多台步进电机高精度伺服控制,实现飞机环境温度、压力和热能量的调整。本设计电路设计简洁,扩展性强,通用性好、可靠性高的特点,可广泛应用与其他伺服控制系统。
猜你喜欢
法律方法(2022年2期)2022-10-20 06:44:24
流程工业(2022年3期)2022-06-23 09:41:08
中学生百科·大语文(2021年11期)2021-12-05 14:27:54
纺织科学研究(2021年7期)2021-08-14 01:42:34
煤气与热力(2021年3期)2021-06-09 06:16:18
网络安全和信息化(2018年4期)2018-11-09 12:01:54
37°女人(2017年11期)2017-11-14 20:27:40
中学科技(2014年11期)2014-12-25 07:38:53
中国新通信(2014年11期)2014-09-11 19:27:52
太空探索(2014年3期)2014-07-10 14:59:39
