
永磁同步风力发电系统控制技术综述
2019-11-15 08:09:40张兰红
微电机 2019年9期
李 胜,张兰红,单 毅
(1 江苏大学 电气信息工程学院,江苏 镇江212013;2.盐城工学院 电气工程学院,江苏 盐城 224051;3.江苏金风科技有限公司,江苏 盐城 224199)
0 引 言
风能因其分布广泛、绿色清洁、蕴量巨大等优点已成为新能源发电的最佳选择之一[1-4]。据相关研究表明,至2030年我国累计风电装机可以达到1.8×108kW左右,届时风电在全国电力容量中的比重将超过11%,可以满足全国5.7%的电力需求[5]。
变速恒频风力发电系统因其开关损耗小、功率因素可调、变桨距调节简单等优点受到越来越多的关注[6-8]。目前,这种风力发电系统主要分为永磁同步发电系统和双馈感应发电系统[6-7],其中永磁同步风力发电系统省去了易发生故障的齿轮箱,降低了维护成本和运行的危险性[7-8],故而成为了风力发电市场的主流选择。
永磁同步风力发电机作为永磁同步风力发电系统的核心部件,其高效率的控制策略得到了越来越多的关注和研究。目前,永磁同步风力发电机的控制技术主要有矢量控制技术和直接转矩控制技术[9-11]。本文对这两种控制技术进行了详细的分析和比较。
1 永磁同步风力发电系统变流拓扑
永磁同步风力发电系统整体拓扑结构如图1所示:
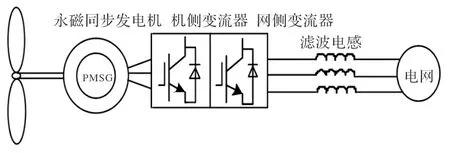
图1 永磁同步风力发电系统整体变流拓扑
目前,针对永磁同步风力发电机的三相电压型风力发电变流拓扑主要有以下五类[12-22]:
(1)机侧不可控整流,网侧PWM逆变
如图2所示,该功率变换拓扑由风机、永磁同步发电机、三相不可控整流器、三相六开关PWM逆变器和滤波电感组成。这种拓扑可以提高开关频率,能实现输出到电网有功功率和无功功率的控制,进而可以调节PMSG的转速。但是,由于这种拓扑采用的是不控整流,对导致电机定子电流低次谐波所占比重增大,无法进行升压,因此对PMSG的绕组和开关器件的绝缘水平提出了更高的要求,导致成本大大增加。此外,由于不能直接调节PMSG电磁转矩,所以其动态响应慢,导致了风能的浪费和发电机效率的降低。

图2 不可控整流+PWM逆变的功率变换拓扑
(2)机侧不可控整流+Boost升压,网侧PWM逆变
如图3所示,该功率变换拓扑由风机、永磁同步发电机、三相不可控整流器、Boost升压装置、PWM逆变器和滤波电感组成。这种拓扑结构可以通过Boost升压对直流母线电压进行稳定控制,解决了第一种拓扑结构在低转速时直流电压较低的缺点,可以对PMSG的转速进行调节,实现系统的最大风能跟踪控制,且成本较低。然而,对于大功率风力发电系统Boost升压电路设计困难,两级控制使系统控制复杂度较高,故而限制了它的推广。

图3 不可控整流+Boost升压+PWM逆变的功率变换拓扑
(3)机侧相控整流,网侧PWM逆变
如图4所示,该功率变换拓扑由风机、永磁同步发电机、三相半控整流器、PWM逆变器和滤波电感组成。该拓扑是将第一种拓扑中的机侧二极管用晶闸管代替,这是由于晶闸管耐压特性较好,可以提高系统的稳定性。但是,虽然通过控制触发角可以实现对晶闸管导通时间的控制,在一定程度上抑制了PMSG的定子电流谐波,但是机侧低次谐波较大的缺点依然没有改善。

图4 相控整流+PWM逆变的功率变换拓扑
(4)机侧不可控整流,网侧阻抗源逆变
如图5所示,该功率变换拓扑由风机、永磁同步发电机、三相不可控整流器、三相阻抗源逆变器和滤波电感组成,其中三相阻抗源逆变器包括阻抗源网络电路和PWM逆变桥。与第二种拓扑结构相比,这种拓扑结构属于单级控制,降低了控制的复杂性,而且能够实现对电机转速的控制,从而达到最大风能捕获的目标。但是,由于增加了阻抗源网络网络环节,导致直流母线电压控制难度大大上升,故而不适用于直流母线电压较大的场所,所以这种拓扑结构多用于中小型功率的永磁同步风力发电系统。

图5 不可控整流+阻抗源逆变的功率变换拓扑
(5)机侧PWM整流,网侧PWM逆变
如图6所示,该功率变换拓扑由风机、永磁同步发电机、PWM整流器、PWM逆变器和滤波电感组成。这种双PWM控制的功率变流器具有四象限运行能力,机侧变流器具有最大风能捕获功能;网侧变流器能够对母线电压进行直接控制,还可实现有功功率和无功功率的解耦控制。此外,机侧变流器能实现对系统功率因素的控制,降低功率损耗,同机侧不控整流相比,能够在很大程度上减少定子电流谐波所占的比重。这也是目前受到关注度最高的一种拓扑结构,本文正是在这种结构的基础之上对永磁同步风力发电机控制技术进行讨论。

图6 PWM整流+PWM逆变的功率变换拓扑
此外,除了以上五种常规的功率变换拓扑结构外,还有一些应用于特殊场合的拓扑结构。比如专门应用于大型风力发电系统的大功率变流器拓扑结构,这种拓扑结构机侧采用十二个二极管组合、网侧采用十二个全控型器件组合,可以提高系统承受功率能力[23]。但是当器件串联排布时会导致每个功率器件电压分布不均匀,器件并联排布时会导致功率器件电流分布不均匀,所以其使用场合受到了很大的限制。
2 控制策略综述
2.1 永磁同步风力发电机的矢量控制
传统的矢量控制有四种,分别为
(1)零d轴电流控制;
(2)力矩电流比最大控制;
(3)功率因数等于1控制;
(4)恒磁链控制。
文献[12]对这四种控制策略用于永磁同步风力发电机进行了比较分析。其中,零d轴电流控制因电磁转矩和电流关系简单、不存在去磁风险、算法易于实现等优点成为矢量控制用于永磁同步风力发电发电机控制策略的主流选择。
(1)零d轴电流控制
文献[24]和文献[25]将id=0控制技术应用于永磁同步风力发电机。当采取id=0控制策略时,电磁转矩和交轴电流成线性关系,不存在直轴电流,所以没有直轴电枢反应,不存在去磁现象。从电机端口看,此时电机相当于一台直流电机。其控制框图如图7所示。

图7 永磁同步风力发电机id=0控制策略框图
(2)无传感器矢量控制
为了解决由于使用传感器所带来的系统可靠性降低等问题,不少学者提出了永磁同步风力发电机无传感器控制技术。文献[19]提出了一种在无位置传感器的情况下,将矢量控制用于永磁同步风力发电机的控制方法。采用简化卡尔曼滤波器进行电机转子位置和转速估计,系统结构如图8所示。该系统选取转子位置和转速作为状态变量,两相定子电流作为输入,建立了基于简化卡尔曼滤波器的永磁同步发电机状态估计离散模型,实现了无位置传感器矢量控制。虽然这种方法在无位置传感器的前提下实现了永磁同步风力发电系统最大功率追踪控制,但是运算量很大,且参数调试复杂。文献[25]提出的结构与文献[19]所提出结构的不同之处在于在卡尔曼滤波器的基础上增加了锁相环功能来对永磁同步发电机的速度和位置信息进行精准估计。文献[26]在永磁同步风力发电机无位置传感器矢量控制的基础上增加了滑模观测器,该方法使状态运动点在相平面上进行微小变动,最终到达静态稳定点,当发电机参数变化时,它具有良好的适应性能,可以在很大程度上提高发电系统的可靠性,但是算法较复杂。文献[27]也提出了一种无位置传感器矢量控制方法,与文献[19]所提出结构的不同之处在于,文献[27]所设计的系统主要针对大功率直驱风力发电系统中的双三相永磁同步风力发电机,并且利用模型参考自适应系统估计发电机转速,分析发电机参数变化对速度估计的影响。该方法稳态性能、动态性能均较好,但却对发电机定子电阻和电感非常敏感。
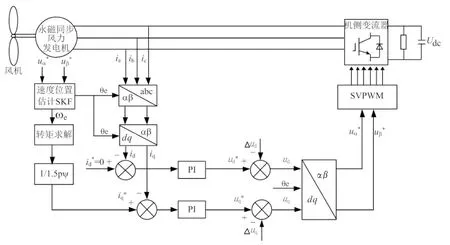
图8 永磁同步风力发电机无位置传感器矢量控制框图
文献[28]提出了一种针对无速度传感器的永磁同步风力发电机矢量控制技术,系统结构如图9所示。该方法通过锁相环锁相定子电压,利用定子电压和模型参考自适应相结合的方法,实现矢量控制坐标系的准确定向。该算法工程实现较简单、系统鲁棒性强,但是在发电机转速变换较大时系统动态响应慢。
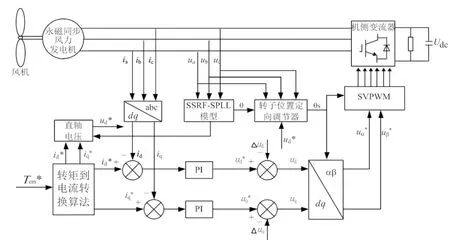
图9 永磁同步风力发电机无速度传感器矢量控制框图
文献[29]在文献[28]的基础上进行了改进,该策略在发电机起动速度和转变速度之间采用最大转矩电流比控制方式;在转变速度与最大速度间采用弱磁控制方式,所改进的结构加快了系统在发电机转速变化较大时的动态响应,适用于要求发电机速度变化较频繁的场所。文献[30]将文献[27]的自适应观测器和文献[29]的滑模控制器结合起来,提出一种基于滑模自适应控制算法的最大功率跟踪策略,可以实现转子的角位置和对转速与系统负载的准确估算。文献[31]对文献[29]所提出的结构作了进一步改善,设计了一种不需要微分估计器及额外滤波装置的新型滑模控制器,解决了滑模控制在提高滑模面速度时会有较大抖振的问题,且保持了终端滑模的有限时间收敛和强鲁棒性的优点,不足之处在于对转子位置的估计精度略有偏差。
(3)自抗扰控制
为了解决风力发电系统非线性、不确定性、强干扰的问题,文献[16]提出了一种以实现最大功率跟踪控制为目标,实时跟踪电机转速的基于最佳叶尖速比的自抗扰控制(ADRC)策略,系统结构如图10所示。该方法不依赖系统数学模型,将永磁同步风力发电机存在的所有干扰看作系统总干扰,利用扩张状态观测器对系统的总干扰进行估计,然后通过反馈控制器进行干扰补偿。文献[32]在文献[16]的基础上进行了进一步讨论,将ADRC和PI相结合,不足之处在于这种控制技术还未对系统进行无传感器方面的研究。
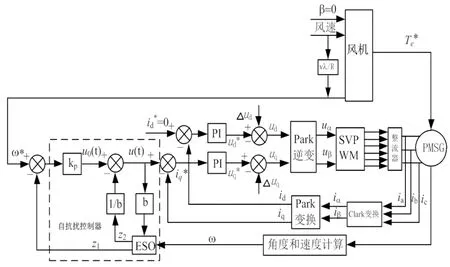
图10 永磁同步风力发电机自抗扰控制技术系统框图
2.2 永磁同步风力发电机的直接转矩控制
直接转矩控制技术直接以转矩为被控制量,给定了定子磁链幅值,通过调节空间电压矢量来直接改变定子磁链和转子磁链之间的夹角,进而直接控制转矩[33]。
(1)给定电压矢量直接转矩控制
文献[34-36]将直接转矩控制应用于永磁同步风力发电机,系统结构如图11所示。通过最大功率跟踪控制得到所需风速,进而得到转矩的估计量;再通过给定定子磁链幅值,转矩和磁链双滞环比较器的输出结果在给定的电压矢量选择表中选择合适的信号输送至机侧变流器,实现对转矩的直接转矩控制。文献[36]针对系统运行过程中参数变化的问题设计了基于扩展卡尔曼滤波器的定子磁链观测器,使得系统具备更好的抗干扰能力和鲁棒性。为了解决定子电阻在实际运行时不断变化的问题,文献[37]提出一种新型定子磁链观测器,该观测器借助有效磁链概念计算出转子磁极位置角观测值,基于此将定子磁链电压模型和电流模型联系起来,无需转子速度信息,但没有考虑转矩环节的影响,依旧依赖于转矩滞环比较器。文献[38]也提出了一种永磁同步风力发电机直接转矩控制策略,不同的是它增加了速度观测器来对风能进行捕获,虽然能有效克服系统参数变化和风速波动不确定性的影响,但是却增加了系统控制难度。文献[39]在文献[37]的基础上利用自适应低通滤波器来估计定子磁链,解决了直流电压漂移和需要初始定子磁通值等问题。
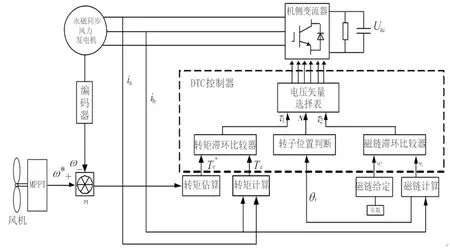
图11 永磁同步风力发电机直接转矩控制框图
(2)空间矢量脉宽调制直接转矩控制
文献[40]将空间矢量脉冲宽度调制(SVM)与DTC相结合应用于永磁同步风力发电机,系统结构如图12所示。这种控制方法采用SVPWM技术代替传统空间电压矢量,摒弃了滞环比较器的使用,解决了传统直接转矩控制系统中开关频率变化引起的开关管损坏等缺点,但是SVM技术的引入使系统的计算量大大增加。文献[14]在文献[40]的基础上设计了一种基于卡尔曼滤波器的定子磁链和电磁转矩观测器,提高了定子磁链和电磁转矩的测量精度。

图12 永磁同步风力发电机SVM-DTC控制框图
(3)无传感器直接转矩控制
同样地,为了减少传感器的使用,提高风力发电系统的可靠性,不少学者对永磁同步风力发电机直接转矩控制无传感器控制技术做了许多研究。文献[40]提出了无位置传感器情况下两种转子检测的方法,但是并未将其应用至实践中。文献[10] 提出了一种永磁直驱型风力发电系统的无风速传感器直接转矩控制策略,直接控制电机的转矩和定子磁链来实现永磁同步发电机的最优控制,不需要转速外环,避免了风速的测量和风速测量不准确等问题,但是对发电机转速的测量精度提出了更高的要求。文献[21]在文献[40]的基础上将SVM和无位置传感器技术相结合用于直接转矩控制系统。文献[41]提出一种利用RBF神经网络进行风速估计并考虑损耗转矩的最大风能跟踪控制策略。
(4)预测直接转矩控制
文献[42]针对直接转矩控制数字控制系统采样与控制时延所造成的电机转矩与磁链纹波增大的问题提出了一种应用于永磁同步发电机的预测直接转矩控制策略,图13为预测时序分析图。这种控制方法主要是通过对转矩和磁链的跨时段预测,来解决时间延迟对系统控制造成的问题。不但减少了转矩波动,而且具有优良的动态性能,系统结构如图14所示。

图13 永磁同步风力发电机预测DTC时序分析图

图14 永磁同步风力发电机预测DTC控制框图
文献[43]通过在一个采样周期内执行三次切换来控制定子磁链和电磁转矩,这种策略使永磁同步风力发电机可在低采样频率下得到更好的控制。文献[44]提出了一种改进的永磁同步发电机模型预测直接转矩控制方法,系统结构如图15所示。该方法通过观测定子电流和等效反电动势在静止坐标系下实现定子磁链和转矩预测,而传统的预测控制算法主要是在旋转坐标系下实现预测控制,从而避免了坐标变换运算,提高了系统的可靠性。文献[45]在文献[42]的基础上考虑了发电机的损耗,系统结构如图16所示。在传统模型预测直接转矩控制的基础上定义了定子有功电流预测值,从而求取发电机电磁转矩预测值,并通过求取系统最小损耗工作点得到定子有功电流设定值,结合最佳特性曲线得到发电机电磁转矩设定值,在提高动态响应速度的同时提高了系统运行效率。
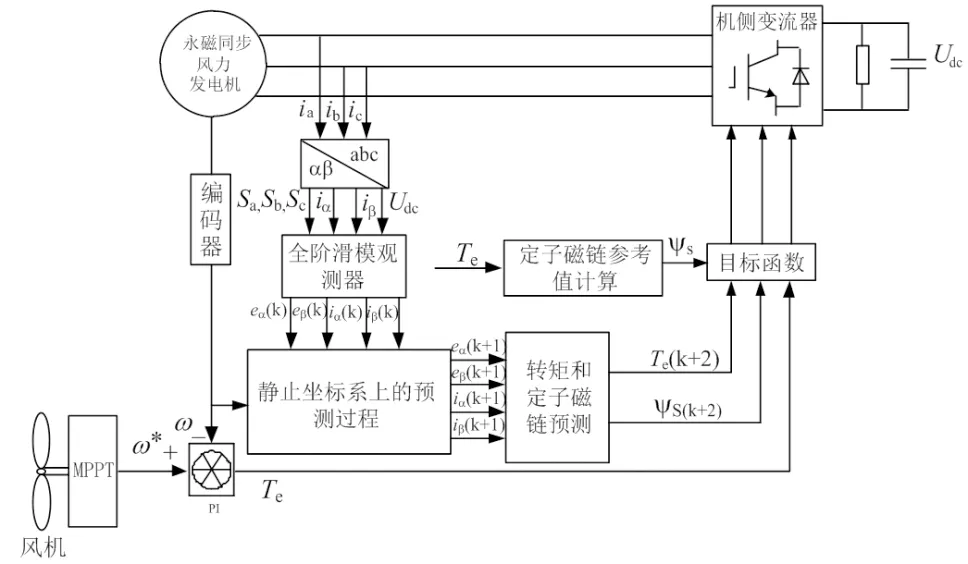
图15 永磁同步风力发电机改进预测DTC控制框图
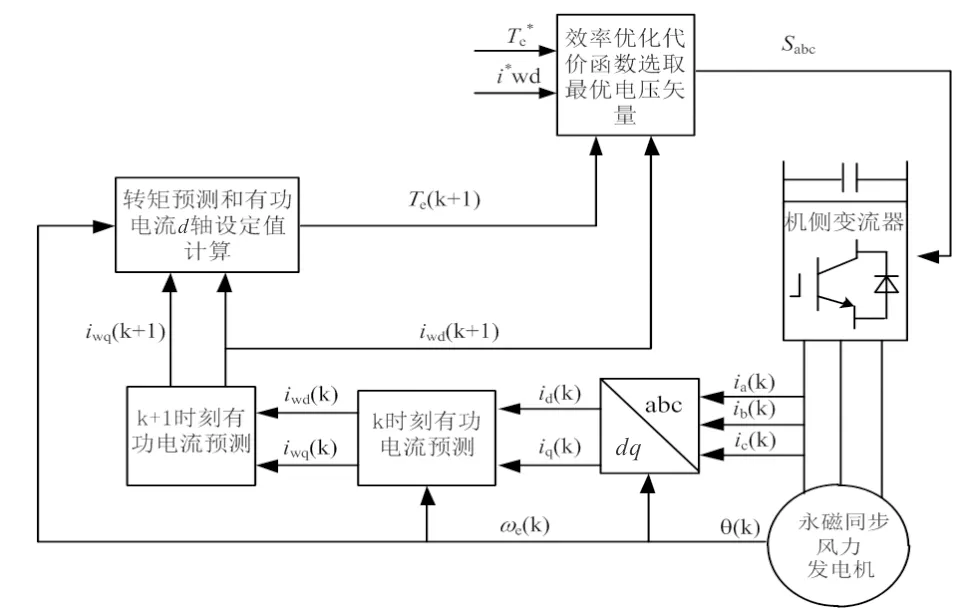
图16 效率优化永磁同步风力发电机预测DTC控制框图
3 结 语
在永磁同步风力发电系统控制技术中,矢量控制通过将发电机直轴电流设定为零,对其电磁转矩和磁链进行控制,但坐标变换引起计算复杂,对数字信号处理能力要求较高;直接转矩控制技术直接以转矩为被控制量,给定定子磁链幅值,通过调节空间电压矢量来直接改变定子磁链和转子磁链之间的夹角,进而直接控制转矩,但是要重视电机参数对算法的影响。
根据永磁同步风力发电系统控制策略的发展历程,该研究方向可能具有以下的发展趋势:一是研究可靠性高的复合控制算法,将矢量控制和直接转矩控制有效结合起来,扬长避短,可以同时满足稳态精度和动态响应的要求;二是针对多极永磁同步风力发电控制技术的研究,随着永磁同步风力发电系统容量的不断扩大,永磁同步风力发电机向多极化发展是必然的趋势;三是对先进控制引入后的简化处理,虽然目前已成功将诸如模型预测控制、自抗扰控制等先进控制技术与矢量控制和直接转矩控制相结合,但是无一例外其计算过程非常复杂且难以理解;四是针对新型变流器拓扑结构,控制技术与多电平变换器结合的研究;五是针对基于观测器的算法,使算法受电机参数影响更小,提高系统的可靠性。
猜你喜欢
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:36
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
山东工业技术(2016年15期)2016-12-01 05:31:27
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电测与仪表(2014年23期)2014-04-04 12:08:30
电测与仪表(2014年11期)2014-04-04 09:21:36
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车电器(2014年8期)2014-02-28 12:14:29
